Содержание
Номинальная частота вращения двигателя — определение термина
максимальное число оборотов вала двигателя с полной нагрузкой, допускаемое регулятором частоты вращения.
Научные статьи на тему «Номинальная частота вращения двигателя»
это электрический двигатель переменного тока, у которого частота вращения ротора не равна частоте вращения…
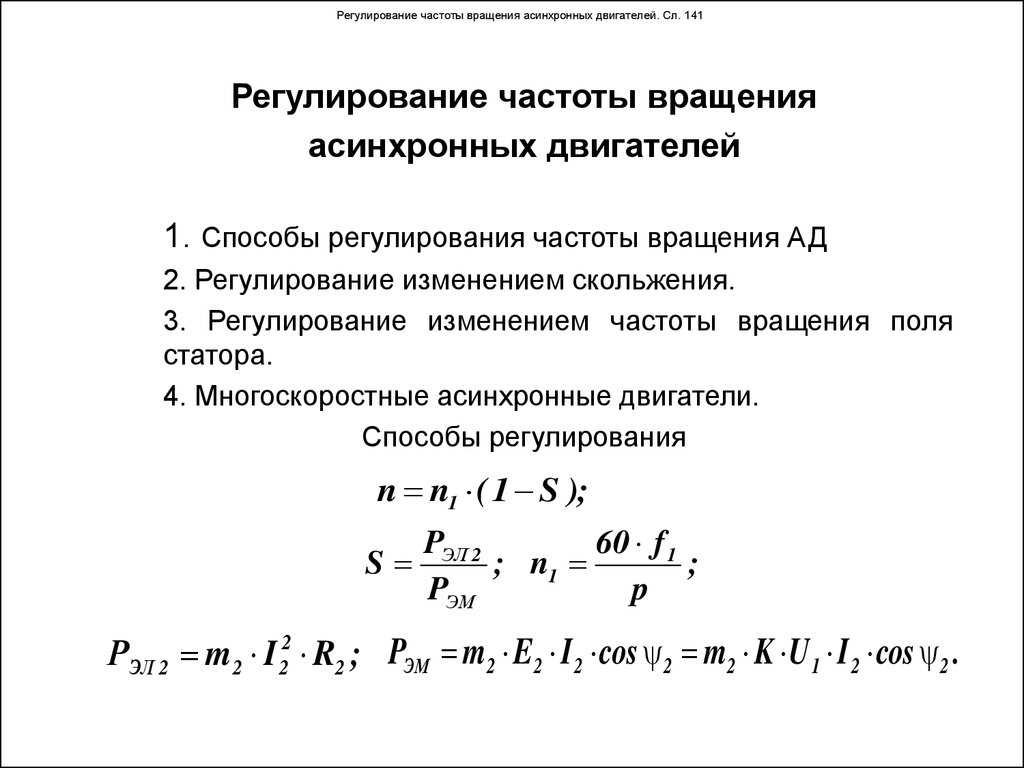
Частотный способ управления заключается в изменении частоты вращения двигателя при помощи изменения частоты…
частота вращения….
Номинальная частота вращения асинхронного двигателя рассчитывается по следующей формуле:
$nн = no * (…
1 – Sn)$
где: no — синхронная частота вращения; Sn — номинальное скольжение
Расчет асинхронного двигателя
Статья от экспертов
Исследовано влияние вакуума и низких температур на рабочие характеристики высокомоментного электрического двигателя. Установлено, что величина вакуума, в отличие от температуры, не влияет на его пусковые характеристики. Снижение температуры двигателя до 143 К повышает пусковой ток в 3,5 раза от номинального, при этом частота вращения не превышает 100 мин-1, после чего двигатель останавливается.
Установлено, что величина вакуума, в отличие от температуры, не влияет на его пусковые характеристики. Снижение температуры двигателя до 143 К повышает пусковой ток в 3,5 раза от номинального, при этом частота вращения не превышает 100 мин-1, после чего двигатель останавливается.
Creative Commons
Научный журнал
вращения….
полем) и асинхронные (частота вращения ротора отличается от частоты вращения магнитного поля)….
Номинальная мощность.
Способ пуска.
Номинальная скорость.
Способ торможения….
механическая мощность на валу, номинальное напряжения питающей сети, частота вращения якоря, номинальный…
$
где: Pном — номинальная механическая мощность на валу; nном — номинальный коэффициент полезного действия
Статья от экспертов
В работе представлены основные этапы переоборудования транспортного дизеля Д21А в газовый двигатель и результаты сравнительных моторных испытаний по оценке энергоэкологических показателей базового и конвертированного двигателя.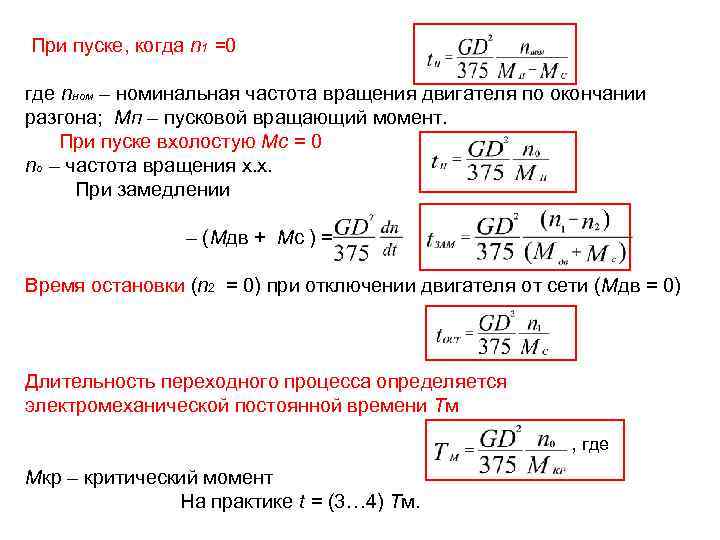 Сравнительные испытания двигателя проводились по нагрузочной характеристике при частоте вращения коленчатого вала соответствующей режиму номинальной мощности.
Сравнительные испытания двигателя проводились по нагрузочной характеристике при частоте вращения коленчатого вала соответствующей режиму номинальной мощности.
Creative Commons
Научный журнал
Повышай знания с онлайн-тренажером от Автор24!
- Напиши термин
- Выбери определение из предложенных или загрузи свое
- Тренажер от Автор24 поможет тебе выучить термины с помощью удобных и приятных
карточек
Номинальные частоты вращения электрических машин
1. Номинальные частоты вращения генераторов и двигателей постоянного тока должны соответствовать указанным в табл.1
| Таблица 1 Номинальные частоты вращения машин постоянного тока | ||
|---|---|---|
| Номинальная частота вращения, об/мин | Генераторы | Двигатели |
| 25 | — | X |
| 50 | — | X |
| 75 | — | X |
| 100 | — | X |
| 125 | — | X |
| 150 | — | X |
| 200 | — | X |
| 300 | — | X |
| 400 | X | X |
| 500 | X | X |
| 600 | X | X |
| 750 | X | X |
| 1000 | X | X |
| 1500 | X | X |
| (2200) | (X) | (X) |
| 3000 | X | X |
| 4000 | X | X |
| (5000) | (X) | (X) |
| 6000 | X | X |
| 7500 | X | X |
| 10000 | X | X |
| 12500 | X | X |
| 15000 | X | X |
| 20000 | — | X |
| 30000 | — | X |
| 40000 | — | X |
| 60000 | — | X |
Примечания:
1. Номинальные частоты вращения генераторов постоянного тока, когда их приводными двигателями являются асинхронные двигатели, могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения приводного двигателя.
Номинальные частоты вращения генераторов постоянного тока, когда их приводными двигателями являются асинхронные двигатели, могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения приводного двигателя.
2. Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
3. Допускается применение номинальных частот вращения, отличных от указанных в таблице, для двигателей, предназначенных для привода шахтного подъема и механизмов металлургического производства, для генераторов с Непосредственным приводом от авиационных и автомобильных двигателей.
4. Номинальные частоты вращения двигателей, предназначенных для работы в электроприводе механизмов металлургических агрегатов и на подъемнотранспортных механизмах, должны соответствовать ГОСТ 184-61, малогабаритных автотракторных электродвигателей — ГОСТ 9443-67.
2. Номинальные частоты вращения электрических машин переменного тока (до 15 000 об/мин) при частотах тока, предусмотренных ГОСТ 6697-67 в диапазоне от 50 до 1000 Гц, должны соответствовать: для синхронных двигателей и генераторов — указанным в табл. 2, для асинхронных трехфазных, двухфазных и однофазных двигателей — указанным в табл. 3.
2, для асинхронных трехфазных, двухфазных и однофазных двигателей — указанным в табл. 3.
3. Номинальные частоты вращения электрических машин переменного тока при частотах тока, предусмотренных ГОСТ 6697-67 в диапазоне до 25 Гц, должны соответствовать синхронным частотам вращения, получающимся в результате исполнения электрических машин с числом полюсов:
- 2 и 4 для синхронных генераторов и двигателей;
- 2, 4, 6 и 8 для асинхронных двигателей (трех-, двух- и однофазных).
4. Применение номинальных частот вращения, отличных от указанных в пп. 2 и 3, допускается:
- для электрических машин переменного тока на частоты, отличающиеся от стандартных в технически обоснованных случаях;
- для генераторов переменного тока с непосредственным приводом от авиационных двигателей;
- для двигателей магнитной записи и аппаратуры связи, применяемых в системах автономной синхронизации.
| Таблица 2 Номинальные частоты вращения синхронных машин | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Номинальная частота вращения, об/мин | Синхронные двигатели (Д) и генераторы (Г) частоты, Гц | |||||||||
| 50 | 100 | 200 | 400 | 1000 | ||||||
| Д | Г | Д | Г | Д | Г | Д | Г | Д | Г | |
| 100 | X | — | — | — | — | — | — | — | — | — |
| 125 | X | X | — | — | — | — | — | — | — | — |
| 150 | X | X | — | — | — | — | — | — | — | — |
| 166,6 | X | — | — | — | — | — | — | — | — | — |
| 187,5 | X | X | — | — | — | — | — | — | — | — |
| 214,3 | — | X | — | — | — | — | — | — | — | — |
| 250 | X | X | — | — | — | — | — | — | — | — |
| 300 | X | X | — | — | — | — | — | — | — | — |
| 375 | X | X | — | — | — | — | — | — | — | — |
| 428,6 | — | X | — | — | — | — | — | — | — | — |
| 500 | X | X | — | — | — | — | — | — | — | — |
| 600 | X | X | — | — | — | — | — | — | — | — |
| 750 | X | X | — | — | — | — | — | — | — | — |
| 1000 | X | X | — | X | — | — | — | — | — | — |
| 1500 | X | X | — | X | — | X | (X) | X | — | X |
| 3000 | X | X | X | X | — | X | (X) | X | (X) | X |
| 4 000 | — | — | — | — | (X) | — | (X) | — | (X) | — |
| 6000 | — | — | X | X | X | X | X | X | X | — |
| 8000 | — | — | — | — | — | X | X | — | — | — |
| 10000 | — | — | — | — | — | — | — | X | — | — |
| 12000 | — | — | — | — | X | X | X | X | X | — |
| 15000 | — | — | — | — | — | — | — | X | — | — |
Примечания:
1. Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
2. Для гидрогенераторов с частотой 50 Гц и мощностью свыше 10 000 кВт допускается применение номинальных частот вращения ниже 125 об/мин.
| Таблица 3 Номинальные частоты вращения асинхронных электродвигателей | |||||
|---|---|---|---|---|---|
| Номинальная частота вращения (синхронная), об/ мин | Асинхронные двигатели частоты, Гц | ||||
| 50 | 100 | 200 | 400 | 1000 | |
| 100 | (X) | — | — | — | — |
| 125 | (X) | — | — | — | — |
| 150 | (X) | — | — | — | — |
| 166,6 | (X) | — | — | — | — |
| 187,5 | (X) | — | — | — | — |
| 250 | X | — | — | — | — |
| 300 | X | — | — | — | — |
| 375 | X | — | — | — | — |
| 500 | X | — | — | — | — |
| 600 | X | — | — | — | — |
| 750 | X | — | — | — | — |
| 1000 | X | — | — | — | — |
| 1500 | X | — | — | (X) | — |
| 3000 | X | X | — | (X) | (X) |
| 4000 | — | — | — | (X) | (X) |
| 6000 | — | X | X | X | (X) |
| 8000 | — | — | — | X | — |
| 10000 | — | — | — | — | X |
| 12000 | — | — | X | X | X |
| 15000 | — | — | — | — | X |
Примечания:
1. Номинальные частоты вращения, заключенные в скобках, применять не рекомендуется.
Номинальные частоты вращения, заключенные в скобках, применять не рекомендуется.
2. Номинальные асинхронные частоты вращения могут быть меньше указанных в таблице на частоту вращения, определяемую величиной номинального скольжения.
5. Номинальное скольжение асинхронных трехфазных электродвигателей с нормальным, скольжением должно быть (в процентах синхронной скорости вращения) не более:
При мощности двигателя от 0,1 до 0,6 кВт ………..10
То же свыше 0,6 до 2,2 кВт ………………………….. 7
То же свыше 2,2 до 10 кВт …………………………… 5,5
То же свыше 10 кВт ……………………………………. 3,5
Номинальное скольжение асинхронных трехфазных двигателей мощностью до 0,1 кВт, асинхронных двухфазных, однофазных и двигателей с повышенным скольжением стандартом не устанавливается.
6. Номинальные частоты вращения универсальных коллекторных двигателей должны быть следующие: 2700; 5000; 6000; 8000; 12 000; 14 000 об/мин.
7. Допускаемые отклонения от номинальной частоты вращения могут составлять 0,001-5% номинальной частоты вращения и регламентируются ГОСТ 10683-63 для конкретных видов электрических машин и в зависимости от частоты тока.
8. Номинальные частоты вращения электрических машин специального исполнения (электродвигателей для привода гребных винтов; возбудителей; шаговых; импульсных; тяговых и др.; электрогенераторов автотракторных; для взрывных работ и др.) должны соответствовать стандартам или техническим условиям на эти машины и могут отличаться от указанных в данном параграфе.
Все страницы раздела на websor
Номинальная скорость при полной нагрузке | Arpedon
Номинальная скорость при полной нагрузке или об/мин (оборотов в минуту) двигателя — это скорость, при которой двигатель будет работать при полной нагрузке.
условия крутящего момента, когда приложенное напряжение и частота поддерживаются постоянными при номинальных значениях. На стандартных асинхронных двигателях
скорость при полной нагрузке или фактическая скорость обычно составляет от 95 до 99% синхронной скорости. Это также известно как скольжение.
Синхронная скорость — это теоретическая скорость двигателя, основанная на вращающемся магнитном поле. Формула получения
Формула получения
синхронная скорость
Количество полюсов и скорость асинхронного двигателя взаимозаменяемы. Если вы знаете один, вы можете определить
другой с формулой, показанной выше. Стандартные обороты в минуту:
**Номинальное превышение температуры или изоляции
Класс системы и номинальная температура окружающей среды**
генераторы) — это максимальная температура в самой горячей точке агрегата и продолжительность времени, в течение которого
допускается существование температуры.
 Максимально допустимая безопасная рабочая температура в самой горячей точке внутри
Максимально допустимая безопасная рабочая температура в самой горячей точке внутри
мотор определяется:
- Температура воздуха вокруг двигателя. Это температура окружающей среды. Двигатели рассчитаны на температуру окружающей среды 40°C (104°F).
- Тепло, выделяемое двигателем при его работе при полной нагрузке. Это повышение температуры.
- Термическая способность всех изоляционных материалов, используемых в двигателе. Для простоты эти материалы разбиты на классы A, B, F и H.
Этот стандартный температурный класс со сроком службы 20 000 часов основан на температуре окружающей среды и тепле, выделяемом двигателем во время работы.
Пожалуйста, имейте в виду, что двигатели рассчитаны на очень высокие температуры. Например, класс B оценивается
при 130°C, что составляет 266°F, или на 54 градуса выше точки кипения воды. Двигатели были разработаны, чтобы выдерживать этот тип
тепла.
Изоляционные материалы предотвращают контакт металла с металлом или короткое замыкание между фазами. Его также называют диэлектрическим.
Его также называют диэлектрическим.
прочность — ограничивает влияние колебаний напряжения. Классы систем изоляции следующие:
Устранение колебаний скорости двигателя, вызванных входным напряжением или колебаниями нагрузки
Двигатель переменного тока может быть прост в использовании, но его скорость изменяется в зависимости от размера нагрузки или количества подаваемого напряжения. Для приложений, где важно поддерживать постоянную скорость, есть другой тип двигателя, который может улучшить производительность.
Во-первых, давайте разберемся, как двигатель переменного тока определяет свой «номинальный крутящий момент» и «номинальную скорость». Номинальный крутящий момент и номинальная скорость — это то, где двигатель будет работать наиболее эффективно для данного напряжения, двигателя и нагрузки. Соотношение между крутящим моментом и скоростью показано на кривой скорости крутящего момента, которая отображает ожидаемую производительность двигателя. Двигатель ускоряется или замедляется в зависимости от момента нагрузки. В идеале правильно подобрать размер двигателя, чтобы вы могли работать с максимальной эффективностью (номинальный крутящий момент и номинальная скорость).
Посмотрите на приведенную ниже кривую скорость-момент для асинхронного двигателя переменного тока. Когда вы подаете питание на двигатель переменного тока, двигатель начинает работать с 0 об/мин, постепенно увеличивает скорость, пока не войдет в стабильную область, а затем установится на «номинальной скорости». Эта номинальная скорость находится где-то ниже «скорости без нагрузки» и «синхронной скорости» и определяется крутящим моментом нагрузки, приложенным к двигателю. Если вы проведете горизонтальную линию от значения номинального крутящего момента по оси Y к стабильной области кривой, номинальная скорость будет там, где она пересекает кривую.
Эта номинальная скорость находится где-то ниже «скорости без нагрузки» и «синхронной скорости» и определяется крутящим моментом нагрузки, приложенным к двигателю. Если вы проведете горизонтальную линию от значения номинального крутящего момента по оси Y к стабильной области кривой, номинальная скорость будет там, где она пересекает кривую.
Математически вот формула, определяющая «синхронную скорость» двигателя.
Компания Oriental Motor производит двигатели переменного тока с 2 и 4 полюсами. Для трехфазного двигателя переменного тока с входным напряжением 220 В переменного тока, 60 Гц синхронная скорость двигателя (об/мин) = 120 x 60/4 = 1800 об/мин. Синхронная скорость — это по сути безнагрузочная скорость с проскальзыванием. Поскольку приложение номинальной нагрузки замедлит двигатель до его номинальной скорости, разница между номинальной скоростью и синхронной скоростью является наличием номинальной нагрузки.
Однако, если крутящий момент увеличивается из-за различной массы груза, например, в ящикном конвейере на почте, перевозящем грузы разного веса, требуемый крутящий момент увеличится (сила x радиус шкива), и вы больше не сможете работать на линия номинального крутящего момента. Вместо этого скорость двигателя колеблется вверх и вниз вместе с изменениями момента нагрузки. На приведенном ниже графике показан пример, когда повышенная нагрузка на трение замедляет работу двигателя переменного тока.
Вместо этого скорость двигателя колеблется вверх и вниз вместе с изменениями момента нагрузки. На приведенном ниже графике показан пример, когда повышенная нагрузка на трение замедляет работу двигателя переменного тока.
Помните, я сказал, что кривая скорости и момента предназначена для данного напряжения, двигателя и нагрузки? Теперь давайте посмотрим, как колебания входного напряжения могут изменить кривую. Более высокое напряжение создает более высокий крутящий момент, толкая кривую вверх и наоборот. Скорость и характеристики ускорения также зависят от изменения доступного крутящего момента. К вашему сведению: если у вас есть двигатель переменного тока, скорость которого колеблется при одной и той же нагрузке, то одним из первых шагов при устранении неполадок будет проверка того, колеблется ли входное напряжение двигателя. |
Для получения дополнительной информации о характеристиках двигателей переменного тока, пожалуйста, прочитайте наш информационный документ, . |

Пока достаточно теории. Некоторые частотно-регулируемые приводы предлагают векторное управление и компенсацию скольжения двигателя, чтобы уменьшить колебания скорости и отрегулировать выходное напряжение на двигателе, но точная настройка параметров двигателя требует времени. Есть еще одно решение plug and play, которое может помочь.
В этом примере приложения мы рассмотрим устройство подачи деталей (вибрационная чаша), в котором используется двигатель переменного тока.
Устройство подачи деталей распределяет грузы в заданном направлении и отправляет их на следующий производственный процесс за счет вибрации механизма подачи с помощью трехфазного асинхронного двигателя переменного тока. VFD (инвертор) используется для управления скоростью.
Общие проблемы:
- Скорость подачи изменяется из-за колебаний входного напряжения двигателя.
- Различные нагрузки также могут изменить скорость подачи.

- Точная настройка скорости для различных нагрузок затруднена.

| Решением, которое может устранить все эти проблемы, является бесщеточный двигатель с постоянными магнитами и обратной связью. Бесщеточные двигатели Oriental Motor оснащены специальными драйверами для оптимальной производительности и регулирования скорости с обратной связью на уровне +/- 0,2% или лучше. Более высокая эффективность, компактный размер, более низкая рабочая температура и постоянный крутящий момент — это другие преимущества бесщеточных двигателей, которые также могут помочь повысить производительность. |
Специальный драйвер может принимать широкий диапазон входного напряжения и регулировать его выход на двигатель. Пример нашей серии BMU мощностью 30 Вт показан ниже. Если вы посмотрите на характеристики блока питания, то увидите широкий диапазон входных напряжений. Пока входное напряжение находится в этом диапазоне (100~120 В переменного тока), можно ожидать такой же производительности.
Пример нашей серии BMU мощностью 30 Вт показан ниже. Если вы посмотрите на характеристики блока питания, то увидите широкий диапазон входных напряжений. Пока входное напряжение находится в этом диапазоне (100~120 В переменного тока), можно ожидать такой же производительности.
Контроль обратной связи достигается за счет встроенных в двигатели датчиков Холла. Сигналы датчика Холла используются как для измерения скорости двигателя, так и для определения времени последовательности возбуждения статора. Специализированный драйвер обеспечивает лучшее регулирование скорости, всегда сравнивая заданную скорость (заданную скорость) с фактической скоростью (скорость, рассчитанная по импульсам датчика Холла). Если скорость выходит за допустимые пределы, коррекция скорости выполняется мгновенно на лету.
Сравнение производительности двигателя переменного тока и бесщеточного двигателя:
Бесщеточные двигатели с постоянными магнитами, цифровым ШИМ-управлением (широтно-импульсной модуляцией), регулируемым напряжением, постоянным крутящим моментом и обратной связью обеспечивают стабильное управление скоростью и следующие улучшения.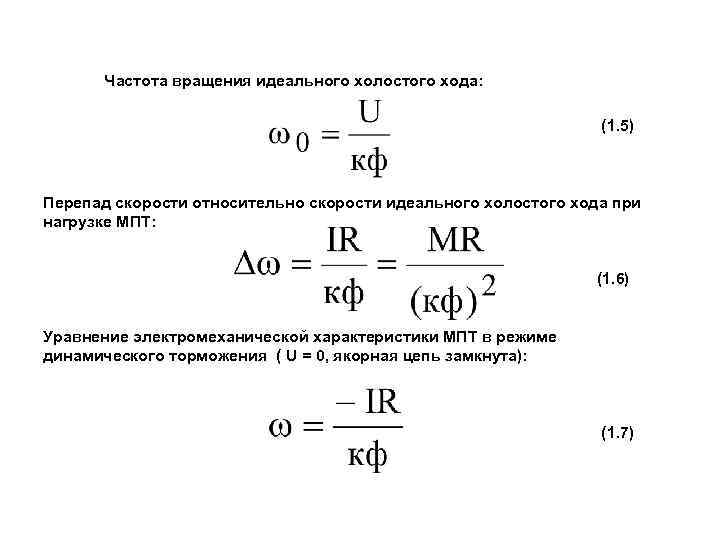 над двигателями переменного тока и частотно-регулируемыми приводами.
над двигателями переменного тока и частотно-регулируемыми приводами.
Регулирование скорости измеряется при номинальной скорости. Для бесщеточного двигателя номинальная скорость обычно выше 3000 об/мин. Для двигателя переменного тока это около 1500 об/мин. Если мы вычислим это, колебания трехфазного асинхронного двигателя переменного тока составят около 150 об/мин, а бесщеточный двигатель — 12 об/мин (+/-6 об/мин).
Кроме того, скорость можно точно установить в цифровом виде с шагом 1 об/мин. Используйте потенциометр на передней панели драйвера, чтобы легко изменить скорость, затем нажмите, чтобы установить.
Для общего применения достаточно двигателей переменного тока. Тем не менее, для более продвинутых приложений, где важна стабильность скорости, меньшая занимаемая площадь или эффективность, полезно знать, что на рынке есть другое решение.
Чтобы узнать больше о бесколлекторных двигателях и других типах технологий управления скоростью, ознакомьтесь с нашим информационным документом.
|