Содержание
Магнитный двигатель Muammer Yildiz — Эко Энергия
Магнитный двигатель Muammer Yildiz
Автор: Patrick J. Kelly (перевод редакции https://ecolm.ru)
Турецкий изобретатель Muammer Yildiz разработал мощный мотор на постоянных магнитах, запатентовал его, и продемонстрировал его сотрудникам и студентам голландского университета. Во время демонстрации, механическая Выходная мощность оценивалась в 250 ватт. Сразу после демонстрации мотор полностью разобрали, чтобы показать, что внутри нет никаких скрытых источников питания. Есть видео, показывающее эту демонстрацию
Патент EP 2,153,515 от 17 февраля 2010 изобретатель: Муаммер Йылдыз
УСТРОЙСТВО, ИМЕЮЩЕЕ специальное РАСПОЛОЖЕНИЯ МАГНИТОВ
Реферат
Прибор имеет вращающийся осевой приводной вал 5 расположен так, что он вращается внутри статора 2, который окружен наружным статором 3. Ротор жестко связан с валом привода. Наружный статор имеет дипольные магниты 6, которые расположены на внутренней поверхности круглого цилиндра 9. Эти внешние магниты расположены равномерно вокруг поверхности цилиндра.
Эти внешние магниты расположены равномерно вокруг поверхности цилиндра.
Описание
Это изобретение представляет собой устройство для генерации переменного магнитного поля, которое взаимодействует со стационарным магнитным полем. Взаимодействие стационарного магнитного поля с переменным магнитным полем уже использовалось, например в бесколлекторных двигателях постоянного тока и в магнитном подвесе.
Объектом настоящего изобретения является создание усовершенствованного устройства, генерирующего переменное магнитное поле, которое взаимодействует со стационарным магнитным полем. Это достигается, как описано в п. 1, путем особого расположения дипольных магнитов на внутреннем статоре, роторе и внешнем статоре, это создает магнитный эффект, при котором ротор свободно плавает между внутренним статором и внешним, и это действует как магнитный подшипник.
Было показано, что специальное расположение дипольных магнитов внутреннего статора, ротора и внешнего статора при вращении ротора, создает переменное магнитное поле, которое позволяет в значительной степени свободно перемещаться ротору при вращении между внутренним статором и внешним статором. Это очень полезный эффект может быть использован для различных технических применений, например для механизмов с требованием к низкому коэффициенту трения подшипников для поддержки вала, который должен вращаться с высокой скоростью.
Это очень полезный эффект может быть использован для различных технических применений, например для механизмов с требованием к низкому коэффициенту трения подшипников для поддержки вала, который должен вращаться с высокой скоростью.
В следующем описании, когда математические термины, особенно для геометрических терминов, используются такие термины, как “параллельно”, “перпендикулярно”, “плоскость”, “цилиндр”, “угол” и др. как это характерно при изготовлении технических чертежей, но необходимо понимать, что эти вещи никогда не достигается на практике, из-за производственных допусков компонентов. Поэтому важно понимать, что это описание относится к идеальной ситуации, которая никогда не будет достигнута. Поэтому читатель должен понимать, что общепринятые допуски будут задействованы на практике.
Выходной вал вращается вокруг одной оси, называются “вал оси”. Сам вал, предпочтительно, сконструировть в виде прямого цилиндра круглого сечения.
В предпочтительном варианте данного изобретения, магниты немного выступают из внутреннего статора. Это также справедливо для ротора и внешнего статора. Частичное перекрытие двух магнитов достигается, когда плоскость перпендикулярна к оси вала, проходит через оба из двух.
Это также справедливо для ротора и внешнего статора. Частичное перекрытие двух магнитов достигается, когда плоскость перпендикулярна к оси вала, проходит через оба из двух.
Частичное перекрытие из трех магнитов возникает, когда плоскости, перпендикулярной оси вала, проходит через каждый из трех магнитов. Степень перекрытия не влияет на описание и величину перекрытия любых двух из трех магнитов может быть любым от 1% до 100%, где магниты перекрывают полностью. Магниты внутреннего статора и ротора находятся в одной плоскости. В дополнение к этому, наружный статор выполнен таким образом, что он может поворачиваться вокруг оси вала так, что контактные соотношение между магнитами ротора и магнитами внешнего статора может регулироваться, чтобы обеспечить любую степень перекрытия от 0% до 100%.
Получается три воображаемые цилиндра. Один соэдан магнитами внутреннего статора, второй магнитами на роторе, так как они вращаются вокруг оси вала, а третий создается магнитами внешнего статора. Оси этих трех цилиндров совпадает с осью вала. Ротор имеет форму барабана, то есть полого цилиндра с круглым поперечным сечением, у которого один торец глухой. В центре ротора имеется отверстие, через которое проходит вал. Полый цилиндр ротора, устроен так, что есть небольшой воздушный зазор между ним и внутренним и внешним статором. Полый цилиндр ротора имеет две, или более линейки, постоянных магнитов, установленных на нем. Они равномерно распределены по окружности цилиндра ротора и расположенными таким образом, чтобы быть параллельно оси приводного вала. Наружный статор выполнен в виде цилиндра и окружает ротор, оставляя небольшой воздушный зазор между ними, его ось совмещена с осью приводного вала. В идеале, магниты, установленные внутри наружного статора, выравниваются с осью приводного вала и их полюса находятся под прямым углом к оси вала. То есть магнитные линии, проходящие через Северный и Южный полюса этих магнитов будет указывать на приводной вал. Магниты внешнего статора, образуют полное кольцо вокруг внутренней грани наружного цилиндра статора.
Оси этих трех цилиндров совпадает с осью вала. Ротор имеет форму барабана, то есть полого цилиндра с круглым поперечным сечением, у которого один торец глухой. В центре ротора имеется отверстие, через которое проходит вал. Полый цилиндр ротора, устроен так, что есть небольшой воздушный зазор между ним и внутренним и внешним статором. Полый цилиндр ротора имеет две, или более линейки, постоянных магнитов, установленных на нем. Они равномерно распределены по окружности цилиндра ротора и расположенными таким образом, чтобы быть параллельно оси приводного вала. Наружный статор выполнен в виде цилиндра и окружает ротор, оставляя небольшой воздушный зазор между ними, его ось совмещена с осью приводного вала. В идеале, магниты, установленные внутри наружного статора, выравниваются с осью приводного вала и их полюса находятся под прямым углом к оси вала. То есть магнитные линии, проходящие через Северный и Южный полюса этих магнитов будет указывать на приводной вал. Магниты внешнего статора, образуют полное кольцо вокруг внутренней грани наружного цилиндра статора. Магнитные кольца должны быть отделены друг от друга немагнитными проставками по всей длине наружного статора. Внутренний и внешний статоры устанавливаются в фиксированной взаимосвязи друг с другом с помощью кронштейнов. В идеале, ротор должен удерживаться в своем положении за счет магнитных полей статоров. Это предпочтительный способ. Однако, возможно использовать роликовые подшипники для приводного вала.
Магнитные кольца должны быть отделены друг от друга немагнитными проставками по всей длине наружного статора. Внутренний и внешний статоры устанавливаются в фиксированной взаимосвязи друг с другом с помощью кронштейнов. В идеале, ротор должен удерживаться в своем положении за счет магнитных полей статоров. Это предпочтительный способ. Однако, возможно использовать роликовые подшипники для приводного вала.
Один из возможных вариантов конструкции является то, что статор состоит из двух отдельных деталей. Они должны быть точно симметричными относительно оси приводного вала. Наружный статор также может быть составным, чтобы была возможность регулировки относительно внутреннего статора, который всегда имеет фиксированную позицию.
Угол “Альфа” определяется как угол между магнитной осью магнита внутреннего статора и касательной к окружности внутреннего статора в этой точке. Угол “бета” определяется как угол между магнитной осью ротора магнита и касательной к окружности ротора в этой точке. Угол “гамма” определяется как угол между магнитной осью магнита внешнего статора и касательной к окружности наружного статора в этой точке. В предпочтительном варианте данного изобретения, каждый из этих углов между 14 градусами и 90.
Угол “гамма” определяется как угол между магнитной осью магнита внешнего статора и касательной к окружности наружного статора в этой точке. В предпочтительном варианте данного изобретения, каждый из этих углов между 14 градусами и 90.
Хороший результат получается при трапецеидальной форме постоянных магнитов на внутреннем, и наружном статорах. Это особенно выгодно, если на роторе магниты имеют круглое поперечное сечение. Возможно применять и другие, несимметричные сечения, например, трапециевидной, треугольной или неправильной формы сечения.
Все магниты внутреннего статора должны иметь одинаковые фигуры, это относится и к наружному статору и к ротору. Тем не менее, позиционирование на Северный магнитный полюс и Южный полюса различных магнитов не будет одинаковое, как будет видно из последующего подробного описания.
Магниты внутреннего статора, ротора и внешнего статора имеют магнитную ориентацию, которая заставляет их отталкиваться друг от друга при каждом угловом положении ротора. Например, магнитов внутреннего статора может иметь своими северными полюсами наружу и в этом случае магниты на роторе будет иметь их северные полюса обращена внутрь внутреннего статора. Аналогично, магнитами внешнего статора, тогда их южные полюса обращены вовнутрь для того, чтобы оттолнуть (наружный) Южные полюсы магнитов ротора.
Например, магнитов внутреннего статора может иметь своими северными полюсами наружу и в этом случае магниты на роторе будет иметь их северные полюса обращена внутрь внутреннего статора. Аналогично, магнитами внешнего статора, тогда их южные полюса обращены вовнутрь для того, чтобы оттолнуть (наружный) Южные полюсы магнитов ротора.
Дальнейшие особенности, детали и преимущества изобретения станут очевидными из последующего описания примера осуществления изобретения и связанные рисунки, как показано здесь:
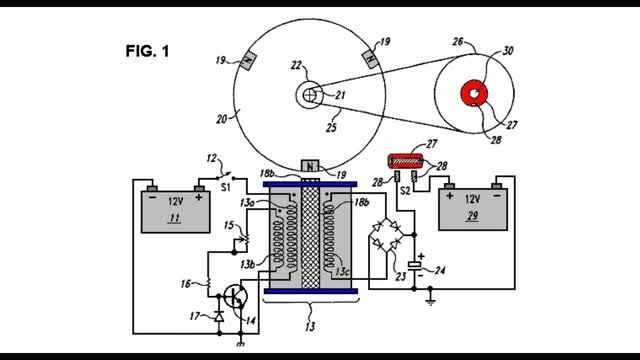
Фиг.1 представляет собой схематическое изображение устройства
Фиг.2а представляет собой косой вид на внутренний статор без магнитов и рис.2b показан вид внутренней статоре под прямым углом к оси вала.
Фиг.3 изображен магнит переложение для внутреннего статора
Фиг.4 разрез через внутренний статор, вдоль линии А—А указано на фиг.12б
Фиг.5А показан вид крепления прибора перпендикулярно к оси вала и на фиг.5Б показан вид устройства Крепления в направлении оси вала
Фиг. 6 представлен общий вид ротора
6 представлен общий вид ротора
Фиг. 7а представляет собой схематический вид внутреннего статора и ротора. Фиг.7Б приведена схема возможного угла магнитной оси магнитов в роторе
Фиг.8а показывает расположение магнитного ротора, вдоль направления х—Г указано на фиг.16. Фиг.8В представляет подробный вид ротора показано на фиг.8а.
Фиг.9а-9h показывают углы наборы магнитов, установленных в роторе при взгляде сбоку. Это показано более подробно ниже в этом описании.
Фиг.10 показано положение струны магнита, встроенных в ротор. Эти даны более подробно позже.
Фиг.11 показано расположение магнитов на обоих статоров и ротора, как показано сечение вдоль оси вала.
Фиг.12а показано расположение цилиндра и задиры ротора до ротора магниты устанавливаются в промежутки между ребрами.
Фиг.12б показано расположение магнитов ротора, как видно в вид под прямым углом к продольной оси ротора.
Фиг.13 показывает позиционирование магнитов ротора. Этот вид показывает поверхность ротора и его вала.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг.1 показывает схематическое представление устройства, имеющего внутренний статор 2, ротор 1 и наружный статор 3, которые расположены соосно оси вала 50 из шарнирного стержне-образного вала 5. Цилиндрический внутренний статор 2 имеет на каждом конце, в торцевой крышке 13, которая выполнена в виде круглого диска, подшипник 11. Подшипник 11, поддерживает положение внутреннего статора 2 относительно вала 5. Привод вала 5 осуществляется, как правило, из немагнитного материала, например пластика, (не стали) и, имеет диаметр от 10 мм до 40 мм и длиной 100 мм до 400 мм.
Внутренний статор 2 имеет сердечник 12 с магнитами 8, установленными на его наружной поверхности. Внутренний статор 2 находится в стационарном положении с помощью крепежного устройства 4, который неподвижно закреплен в механическом корпусе (не показано).
Ротор 1 состоит из двух барабанов, каждый с полой секцией и круглого разделительного диска, который жестко крепится на приводной вал 5 посредством установочных винтов 10.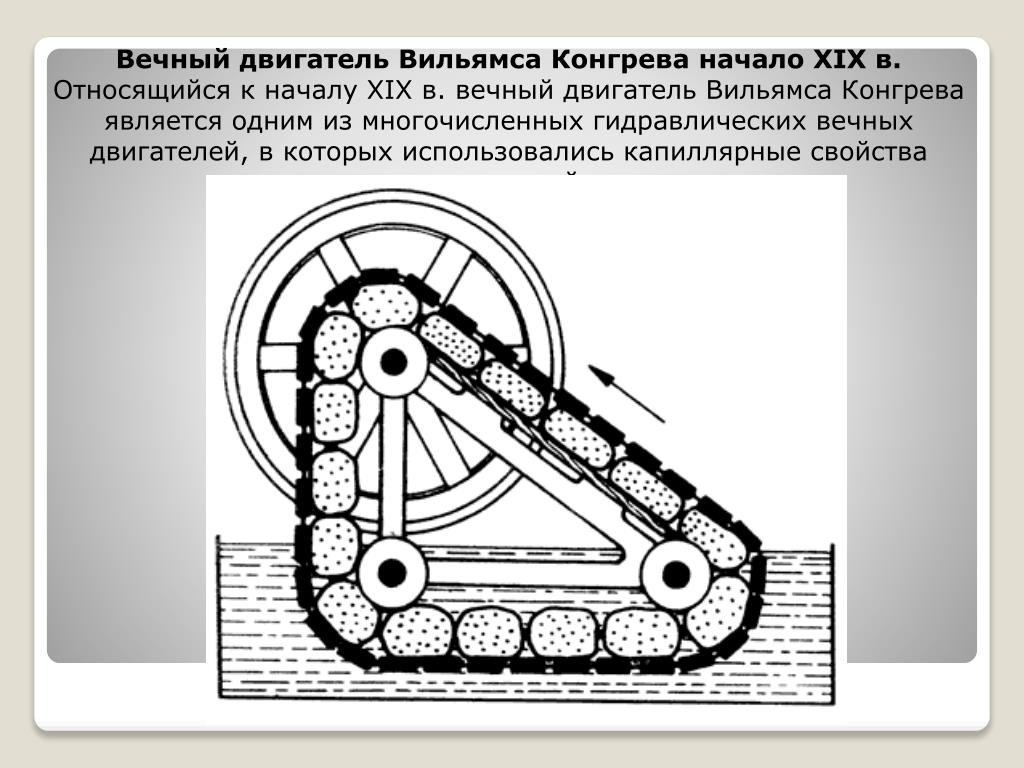 На каждый из барабанов крепятся магниты 7. Эти магниты 7, расположены в пяти различных местах и у них один магнитный полюс, обращенной к валу, а другой полюс обращена радиально сторону.
На каждый из барабанов крепятся магниты 7. Эти магниты 7, расположены в пяти различных местах и у них один магнитный полюс, обращенной к валу, а другой полюс обращена радиально сторону.
Барабаны ротора расположены так, что имеют воздушный зазор между внутренним статором 2. Этот воздушный зазор составляет обычно порядка 3 мм до 50 мм. Хотя две половинки ротора являются разделенные зажимным механизмом 4, который предохраняет внутренний статор от вращения, половинки ротора расположены так, что магниты в них сбалансированы и поэтому нет неправильных сил, возникающих, когда вал 5 вращается с высокой скоростью. На концах роторных барабанов есть магниты 700 для вывешивания ротора в среднем положении.
Наружный статор 3 состоит из двух отдельных цилиндрических половинок 9. Каждый из этих цилиндров 9, содержит магниты 6 установленные на его внутренней плоскости. Хотя каждая секция наружного статора состоит из полого цилиндра, наружные торцы корпуса статора образуют полный диск, который окружает приводной вал 5 и формируют полный корпус.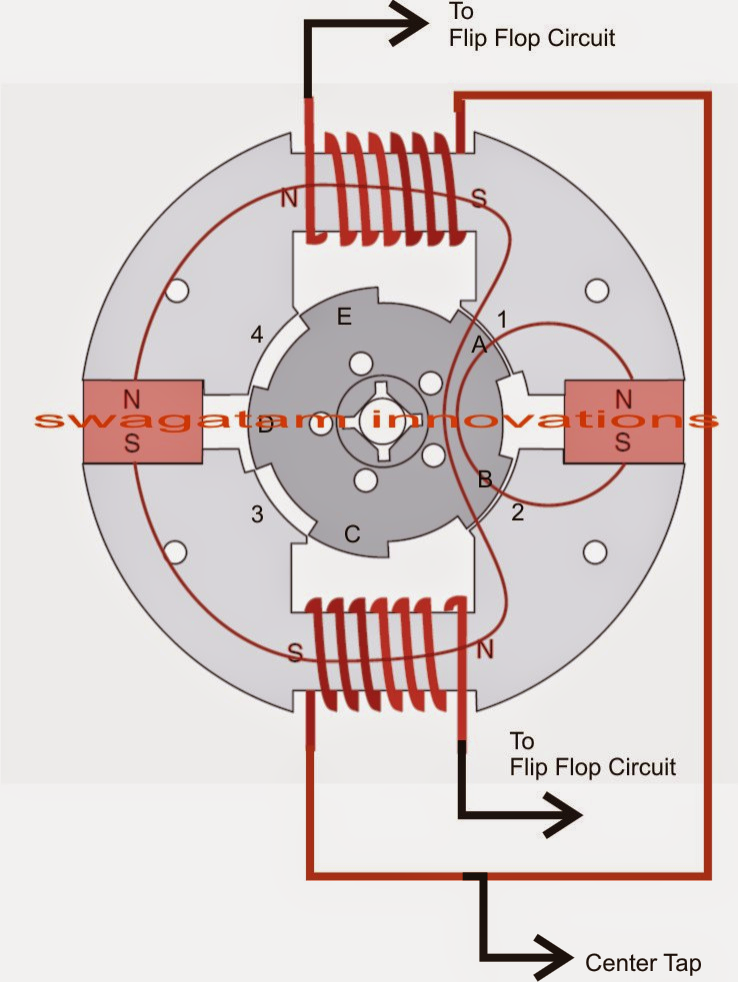 Есть воздушный зазор между магнитами, установленными на внутренней поверхности цилиндрического корпуса 9 и магнитами ротора. Этот воздушный зазор между ними составляет от 3 мм до 50 мм. Магниты на каждом из статоров расположены параллельно оси вала 50. Внешний статор выполнен так, что его можно перемещать относительно внутреннего статора, изменяя таким образом их магнитные потоки. Это изменение может быть сделано путем перемещения наружного статора, когда двигатель работает.
Есть воздушный зазор между магнитами, установленными на внутренней поверхности цилиндрического корпуса 9 и магнитами ротора. Этот воздушный зазор между ними составляет от 3 мм до 50 мм. Магниты на каждом из статоров расположены параллельно оси вала 50. Внешний статор выполнен так, что его можно перемещать относительно внутреннего статора, изменяя таким образом их магнитные потоки. Это изменение может быть сделано путем перемещения наружного статора, когда двигатель работает.
Магниты 6, 7 и 8, являются дипольными магнитами (неодим/железо/Бор). Также возможно, что один или более из этих магнитов будет электромагнит. Магнитная индукция магнитов 6, 7, 8 в диапазоне от 0,4 до 1,4 ТЛ.
Каркас изготавливают из немагнитного материала, например алюминия с толщиной стенки от 2 мм до 10 мм.
Фиг.12а показывает внутренний статор, изготовленной из немагнитного материала (например, алюминия или меди). Рамка 12 имеет круговой цилиндр 120, которая имеет прикрепленный к ее внешней поверхности радиальными ребрами 121. Каждое из этих ребер проходит вдоль центральной оси цилиндра 120 по всей длине цилиндра, то есть от ее основания к верхней поверхности. Ребра распределены равномерно по окружности цилиндра, образующие канавки 122. Цилиндр 120 имеет центральное отверстие вдоль своей оси. вала 5, проходят через. В обеих торцевых поверхностях цилиндра 120 есть углубления для шарикоподшипников 11. Диаметр сердечника статора 12 обычно 50 мм до 500 мм длиной от 100 мм до 300 мм. Ширина ребер 121, как правило, не более 100 мм и обычно составляет около 20% длины ребер 121.
Каждое из этих ребер проходит вдоль центральной оси цилиндра 120 по всей длине цилиндра, то есть от ее основания к верхней поверхности. Ребра распределены равномерно по окружности цилиндра, образующие канавки 122. Цилиндр 120 имеет центральное отверстие вдоль своей оси. вала 5, проходят через. В обеих торцевых поверхностях цилиндра 120 есть углубления для шарикоподшипников 11. Диаметр сердечника статора 12 обычно 50 мм до 500 мм длиной от 100 мм до 300 мм. Ширина ребер 121, как правило, не более 100 мм и обычно составляет около 20% длины ребер 121.
На Фиг.12б показано схематическое изображение внутреннего статора 2. Внутренний статор 2 состоит из внутренней рамы 12, магнитов 8 и торцевых крышек 13. Магниты 8 имеют равную длину, а их длина меньше длины сердечника статора 12. Они сидят в пазах 122 и удерживается в нужном положении ребрами 121. Первый магнит 8-1 вставляется заподлицо с торцевой крышкой 13. Другие имеют осевое смещение вдоль оси вала 50, последний магнит 8-10 упирается во второй конец пластины 13. В типичной установке, V-это 5% от длины магнитов 8.
В типичной установке, V-это 5% от длины магнитов 8.
Торцевые крышки 13 имеют диаметр от 50 мм до 500 мм и толщиной от 5 мм до 20 мм. Типичная длина для магнитов 8 — 100 мм. Размеры магнита расположены таким образом, что, когда они располагаются в пазах 122, внутренний статор 2 имеет гладкую наружную поверхность.
Фиг.13 показан разрез внутреннего статора 2. Десять магнитов 8 расположены с интервалом. С нижней стороны магнитов конусности в направлении оси вала 50 и поэтому они имеют меньшую ширину, недалеко от центра статора, чем на внешней поверхности. Первый магнит 8-1 позиционируется с одного торца совмещена с основанием 125 внутреннего сердечника статора 12. Оставшиеся девять магнитов (8-2 до 8-10) каждое смещение на величину V с последнего магнита 8-10 достигнув верхней поверхности внутреннего сердечника статора 126.
Фиг.14 показывает поперечный разрез внутреннего статора 2 вдоль плоскости А—А на фиг.12б. Внутренний статор 2 имеет полый цилиндр 120, через который проходит Центральная ось вала 5. Вдоль наружной поверхности цилиндра с ребрами 121. Полый цилиндр 120 обычно имеет диаметр 100 мм и длиной 170 мм. В пазах, между ребрами 121 размещены магниты 8. Эти магниты имеют трапецеидальное сечение. Эти магниты имеют два магнитных полюса, и магниты расположены так, что магнитные оси 80, который проходит через два полюса радиально в плоскости сечения А—А. угол α [Альфа] образуется в точке пересечения оси магнитного диполя 80 магнита 8 и касательной 81 ребер 121 может иметь значение в диапазоне от 14 градусов и 90 градусов. В случае, представленном на фиг.14 угол Альфа равен 90 градусов. Аренда спец.техники
Вдоль наружной поверхности цилиндра с ребрами 121. Полый цилиндр 120 обычно имеет диаметр 100 мм и длиной 170 мм. В пазах, между ребрами 121 размещены магниты 8. Эти магниты имеют трапецеидальное сечение. Эти магниты имеют два магнитных полюса, и магниты расположены так, что магнитные оси 80, который проходит через два полюса радиально в плоскости сечения А—А. угол α [Альфа] образуется в точке пересечения оси магнитного диполя 80 магнита 8 и касательной 81 ребер 121 может иметь значение в диапазоне от 14 градусов и 90 градусов. В случае, представленном на фиг.14 угол Альфа равен 90 градусов. Аренда спец.техники
Фиг.15а показывает крепежное устройство 4 в виде перпендикулярных к оси вала 50. Крепежные устройства 4 имеет внутренний полый цилиндр 40 с меньшим радиусом и наружным крепления кольцевой пластины 41 с большим радиусом. Внутренний полый цилиндр 40 и наружного кольца крепления пластины 41 соединены вместе. Полый цилиндр 40 используется для приема и фиксации внутреннего статора 2 посредством винтов 10. Крепежные кольца 41 является частью механического корпуса (не показан) для удержания устройства.
Крепежные кольца 41 является частью механического корпуса (не показан) для удержания устройства.
Фиг.15в показывает крепежное устройство 4 Вид в направлении оси вала 50. Крепежные кольца пластины 41 имеет четыре винта 10 для крепления к корпусу полого цилиндра 40, который имеет на своей окружности ряд винтов 10 для крепления внутреннего статора.
Автор: Patrick J. Kelly (перевод редакции https://ecolm.ru)
<<<— Часть № 7
Магнитные двигатели на постоянных магнитах (схема, видео)
Регистрация / Вход
Дата публикации: 15 января 2020
Открыв для себя уникальные способности магнитов надежно удерживать друг друга буквально на весу, человечество долго не знало, что делать с этим уникальным явлением. Однако пытливые умы, не оставляющие надежды освоить альтернативные источники энергии вместо исчерпаемых ресурсов, сумели найти этому физическому явлению достойное применение. Доказательством стали многочисленные образцы магнитных двигателей, способные интенсивно вращаться без капли топлива, подчиняясь силе созданного ими магнитного поля. Однако часть из них на поверку оказалась лишь фикцией, призванной прославить имя своего создателя за счет поднятой шумихи. Но есть и «честные» изобретения, которые при ближайшем рассмотрении оказались вполне работоспособными. В их числе – магнитный двигатель японца Кохеи Минато.
Однако часть из них на поверку оказалась лишь фикцией, призванной прославить имя своего создателя за счет поднятой шумихи. Но есть и «честные» изобретения, которые при ближайшем рассмотрении оказались вполне работоспособными. В их числе – магнитный двигатель японца Кохеи Минато.
Принцип действия вечного магнитного движителя
Большинство современных эл. двигателей используют принцип трансформации эл. тока в механическое вращение ротора, а вместе с ним и приводного вала. Это значит, что любой расчет покажет КПД меньше 100%, а сам агрегат является зависимым, а не автономным. Та же ситуация наблюдается в случае генерирующего устройства. Здесь уже момент вращения вала, которое происходит за счет тепловой, ядерной, кинетической или потенциальной энергии движения среды, приводит к выработке электрического тока на коллекторных пластинах.
Двигатель на постоянных магнитах использует совершенно иной подход к работе, который нивелирует или сводит к минимуму необходимость в сторонних источниках энергии. Описать принцип работы такого двигателя можно на примере «беличьего колеса». Для изготовления демонстративной модели не требуются особые чертежи или расчет надежности. Необходимо взять один постоянный магнит тарельчатого (дискового) типа, полюса которого располагаются на верхней и нижней плоскостях пластин. Он будет служить основой конструкции, к которой нужно добавить два кольцевых барьера (внутренний, внешний) из немагнитных, экранирующих материалов. В промежуток (дорожку) между ними помещается стальной шарик, который будет играть роль ротора. В силу свойств магнитного поля, он сразу же прилипнет к диску разноименным полюсом, положение которого не будет меняться при движении.
Описать принцип работы такого двигателя можно на примере «беличьего колеса». Для изготовления демонстративной модели не требуются особые чертежи или расчет надежности. Необходимо взять один постоянный магнит тарельчатого (дискового) типа, полюса которого располагаются на верхней и нижней плоскостях пластин. Он будет служить основой конструкции, к которой нужно добавить два кольцевых барьера (внутренний, внешний) из немагнитных, экранирующих материалов. В промежуток (дорожку) между ними помещается стальной шарик, который будет играть роль ротора. В силу свойств магнитного поля, он сразу же прилипнет к диску разноименным полюсом, положение которого не будет меняться при движении.
Статор представляет собой условно пластину из экранируемого материала, на которую по кольцевой траектории крепят постоянные магниты, например, неодимовые. Их полюса расположены перпендикулярно по отношению к полюсам дискового магнита и ротора. В результате, когда статор приближается к ротору на определенное расстояние, возникает поочередное притяжение, отталкивание в магнитном поле, которое формирует момент затем перерастает во вращение шарика по кольцевой траектории (дорожке). Пуск и остановка происходят за счет приближения или отдаления статора с магнитами. Этот вечный двигатель на постоянных магнитах будет работать до тех пор, пока они не размагнитятся. Расчет ведется относительно размера коридора, диаметров шарика, пластины статора, а также цепи управления на реле или катушках индуктивности.
Пуск и остановка происходят за счет приближения или отдаления статора с магнитами. Этот вечный двигатель на постоянных магнитах будет работать до тех пор, пока они не размагнитятся. Расчет ведется относительно размера коридора, диаметров шарика, пластины статора, а также цепи управления на реле или катушках индуктивности.
На подобном принципе действия было разработано немало моделей действующих образцов, например, синхронных двигателей, генераторов. Наиболее известными среди них являются двигатели на магнитной тяге Тесла, Минато, Перендев, Говарда Джонсона, Лазарева, а также линейные, униполярные, роторные, цилиндровые и т. д.
Рассмотрим каждый из примеров подробнее.
Разновидности магнитных двигателей и их схемы
Сегодня существует много моделей бестопливных генераторов, электрических машин и моторов, чей принцип действия основан на природных свойствах постоянных магнитов. Некоторые варианты были спроектированы именитыми ученными, достижения которых стали основополагающим камнем в фундаменте науки. Поэтому далее мы рассмотрим самые популярные из них.
Поэтому далее мы рассмотрим самые популярные из них.
Николы Тесла
В данном примере мы рассмотрим одну из разработок известного ученого, конструкция которой приведена на рисунке ниже:
Магнитный двигатель Тесла
Конструктивно магнитный двигатель Тесла состоит из таких элементов:
- электрического генератора, который представлен двумя дисками из проводника, помещенными в униполярной магнитной среде;
- гибкого ремня, изготовленного из проводящего материала, расположенного по периферии дисков;
- независимых магнитов, сохраняющих униполярность полей при вращении дисков.
Такой двигатель, по словам изобретателя, может функционировать и в качестве генератора, вырабатывая электрическую энергию при вращении дисков.
Минато
Этот пример нельзя назвать самовращающимся двигателем, так как для его работы требуется постоянная подпитка электрической энергией. Но такой электромагнитный мотор позволяет получать значительную выгоду, затрачивая минимум электричества для выполнения физической работы.
Схема двигателя Минато
Как видите на схеме, особенностью этого вида является необычный подход к расположению магнитов на роторе. Для взаимодействия с ним на статоре возникают магнитные импульсы за счет кратковременной подачи электроэнергии через реле или полупроводниковый прибор.
При этом ротор будет вращаться, пока его элементы не размагнитятся. Сегодня все еще ведутся разработки по улучшению и повышению эффективности устройства, поэтому назвать его полностью завершенным нельзя.
Николая Лазарева
Это не только простейший гравитационный двигатель, но и одна из реально работающих моделей вечного двигателя. Пример приведен на рисунке ниже:
Двигатель Лазарева
Как видите, для изготовления такого двигателя или генератора вам потребуется:
- колба;
- жидкость;
- трубка;
- прокладка из пористого материала;
- крыльчатка и нагрузка на вал.
Принцип действия заключается в том, что вода по тонкой трубке из-за избытка давления будет подниматься вверх и скапывать на прокладку и вращать крыльчатку. Далее вода будет просачиваться сквозь губку и под воздействием магнитного поля Земли дальше стекать в нижний резервуар. Цикл будет повторяться до тех пор, пока жидкость не исчезнет, что в идеально герметичном контуре не произойдет никогда. Для усиления момента на вращаемый вал добавляют магнитные усилители.
Далее вода будет просачиваться сквозь губку и под воздействием магнитного поля Земли дальше стекать в нижний резервуар. Цикл будет повторяться до тех пор, пока жидкость не исчезнет, что в идеально герметичном контуре не произойдет никогда. Для усиления момента на вращаемый вал добавляют магнитные усилители.
Говарда Джонсона
В своих исследованиях Джонсон руководствовался теорией потока непарных электронов, действующих в любом магните. В его двигателе обмотки статора формируются из магнитных дорожек. На практике эти агрегаты получили реализацию в конструкции роторного и линейного двигателя. Пример такого устройства приведен на рисунке ниже:
Двигатель Джонсона
Как видите, на оси вращения в двигателе устанавливаются сразу и статор и ротор, поэтому классически вал вращаться здесь не будет. На статоре магниты повернуты одноименным полюсом к роторным, поэтому они взаимодействуют на силах отталкивания. Особенность работы ученого заключалась в длительном вычислении расстояний и зазоров между основными элементами мотора.
Перендева
Данный вид двигателя, как и предыдущий, представляет собой еще одну модель магнитного взаимодействия между статором и ротором, где обе части содержат постоянные магниты. Схема конструкции обоих представляет собой диск или кольцо, в котором точечно устанавливаются вектолиты.
Магниты статора и ротора в двигателе Переднева
Как видите на рисунке, положение активных элементов имеет угол смещения, который и определяет эффективность вращения машины. Взаимодействие магнитных потоков в двигателе происходит при задании начального крутящего момента. Точность положения и угла наклона можно отстроить только в лабораторных или заводских условиях.
Василия Шкондина
Получить вечный генератор Василию Шкодину не удалось, КПД такого магнитного двигателя и сегодня не превышает 83%. Но и этого более чем достаточно, чтобы его повсеместно применяли для велосипедов, байков и самокатов. Он может эксплуатироваться как в режиме тяги, так и для рекуперации электроэнергии.
Двигатель Шкондина
На рисунке приведена конструкция магнитного двигателя Шкодина. Как видите, и ротор и статор представляют собой кольца. Из магнитных деталей он содержит 11 пар неодимовых магнитов. Ротор устройства содержит 6 электромагнитов, смещенных на одинаковое расстояние друг относительно друга.
Свинтицкого
Еще в конце 90-х украинский конструктор предложит модель самовращающегося магнитного двигателя, который стал настоящим прорывом в технике. За основу им был взят асинхронный двигатель Ванкеля, которому не удалось решить проблему с преодолением 360° оборота.
Игорь Свинтицкий эту проблему решил и получил патент, обратился в ряд компаний, однако асинхронное магнитное чудо техники никого не заинтересовало, поэтому проект был закрыт и за его масштабное тестирование ни одна компания не взялась.
Джона Серла
От электрического мотора такой магнитный двигатель отличает взаимодействие исключительно магнитного поля статора и ротора. Но последний выполняется наборными цилиндрами с таблетками из специального сплава, которые создают магнитные силовые линии в противоположном направлении. Его можно считать синхронным двигателем, так как разница частот в нем отсутствует.
Его можно считать синхронным двигателем, так как разница частот в нем отсутствует.
Двигатель Серла
Полюса постоянных магнитов расположены так, что один толкает следующий и т.д. Начинается цепная реакция, приводящая в движение всю систему магнитного двигателя, до тех пор, пока магнитной силы будет хватать хотя бы для одного цилиндра.
Алексеенко
Интересный вариант магнитного двигателя представил ученый Алексеенко, который создал устройство с роторными магнитами необычной формы.
Двигатель Алексеенко
Как видите на рисунке, магниты имеют необычную изогнутую форму, которая максимально сближает противоположные полюса. Что делает магнитные потоки в месте сближения значительно сильнее. При начале вращения отталкивание полюсов получается значительно большим, что и должно обеспечить непрерывное движение по кругу.
Магнитный униполярный двигатель Тесла
Выдающийся ученый, ставший в свое время пионером в области снабжения эл. током, асинхронных электродвигателей на переменном токе, не обделил своим вниманием и расчетом вопрос вечного источника энергии. В научной среде это изобретение именуется иначе, как униполярный генератор Тесла.
В научной среде это изобретение именуется иначе, как униполярный генератор Тесла.
Первоначально расчет данного типа устройства вел Фарадей, но его прототип при сходном принципе действия не обладал должной эффективностью, стабильностью работы, то есть не достиг цели. Термин «униполярный» означает, что в схеме агрегата кольцевой, дисковый (пластина) или цилиндровый проводник расположен в цепи между полюсами постоянного магнита.
Магнитный двигатель Тесла и его схема
На схеме, которая была представлена в оригинальном патенте, есть конструкция с двумя валами, на которых размещаются две пары магнитов: В, В создают условно положительное поле, а С, С – отрицательное. Между ними располагаются униполярные диски с отбортовкой, используемые в качестве генерирующих проводников. Оба униполярных диска связаны между собой тонкой металлической лентой, которая может быть в принципе использована, как проводник (в оригинале) или для вращения диска.
Какие достоинства и недостатки имеют реально работающие магнитные двигатели
Среди преимуществ таких агрегатов, можно отметить следующие:
- Полная автономность с максимальной экономией топлива.

- Мощное устройство с использованием магнитов, может обеспечивать помещение энергией в 10 кВт и более.
- Такой двигатель работает до полного эксплуатационного износа.
Пока что, не лишены такие двигатели и недостатков:
- Магнитное поле может отрицательным образом влиять на человеческое здоровье и самочувствие.
- Большое количество моделей не может эффективно работать в бытовых условиях.
- Есть небольшие сложности в подключении даже готового агрегата.
- Стоимость таких двигателей достаточно велика.
Такие агрегаты уже давно не являются вымыслом и в скором времени вполне смогут заменить привычные силовые агрегаты. На данный момент, они не могут составить конкуренцию привычным двигателям, но потенциал к развитию имеется.
Двигатель Минато
Еще одним ярким примером использования энергии магнетизма для самовозбуждения и автономной работы является сегодня уже серийный образец, разработанный более тридцати лет назад японцем Кохеи Минато. Его отличают бесшумность и высокая эффективность. По собственным заявлениям Минато, самовращающийся магнитный двигатель подобной конструкции имеет КПД выше 300%.
Его отличают бесшумность и высокая эффективность. По собственным заявлениям Минато, самовращающийся магнитный двигатель подобной конструкции имеет КПД выше 300%.
Двигатель Минато
Ротор имеет форму диска или колеса, на котором под определенным углом располагаются магниты. Когда к ним подводится статор с большим магнитом, возникает момент и колесо Минато начинает вращаться, используя попеременное сближение и отталкивание полюсов. Чем ближе статор к ротору, тем выше момент и скорость вращения. Питание осуществляется через цепь реле прерывателя.
Для предотвращения импульсов и биения при вращении колеса Минато, используют реле стабилизаторы и сводят к минимуму потребление тока управляющего эл. магнита. Недостатком можно считать отсутствие данных по нагрузочным характеристикам, тяге, используемых реле цепи управления, а также необходимость периодического намагничивания, о которой, кстати, тоже от Минато информации нет.
Может быть собран, как и остальные прототипы, экспериментально, из подручных средств, например, деталей конструктора, реле, эл. магнитов и т. п.
магнитов и т. п.
Мифы
В том, что в обозримом будущем автомобильная техника поступит в производство и речи не идет из-за, якобы, «страшной» угрозы, которую представляют для автогигантов России двигатели данного типа. В связи с этим, можно говорить, что на месте технологии не стоят, но энергетический, так пугающий нас кризис, во многом создается искусственно.
Созданный в стране Восходящего солнца новый вид мотоцикла СУМО с магнитным двигателем представляет экологичный транспорт, являющийся достойным конкурентом электромобилям. Но, как утверждают, он совсем не безобидный, поскольку для получения электроэнергии, необходима переработка природных ресурсов. Пока трудно сказать, увидит ли когда — нибудь свет, выпущенный заводом Хонда, уникальный мотоцикл.
Двигатель Лазарева
Устройство двигателя Лазарева
Отечественный разработчик Николай Лазарев создал работающий и довольно простой вариант агрегата, использующего магнитную тягу. Его двигатель или роторный кольцар, состоит из емкости, разделенной пористой перегородкой потока на верхнюю и нижнюю части. Они сообщаются между собой за счет трубки, по которой из нижней камеры в верхнюю идет поток воды/жидкости. В свою очередь поры обеспечивают гравитационное перетекание вниз. Если под потоком жидкости поместить колесико, на лопастях которого будут закреплены магниты, то получиться добиться цели потока – вращения и создания постоянного магнитного поля. Схема роторного двигателя Николая Лазарева используется для расчета и сборки простейших самовращающихся устройств.
Они сообщаются между собой за счет трубки, по которой из нижней камеры в верхнюю идет поток воды/жидкости. В свою очередь поры обеспечивают гравитационное перетекание вниз. Если под потоком жидкости поместить колесико, на лопастях которого будут закреплены магниты, то получиться добиться цели потока – вращения и создания постоянного магнитного поля. Схема роторного двигателя Николая Лазарева используется для расчета и сборки простейших самовращающихся устройств.
Кому удалось сделать мотоцикл на магнитном двигателе
В 2013 году японский производитель Хонда решил сделать такой мотоцикл, и ему это удалось. Посмотрите видео уже готового мотоцикла, который был официально представлен. Весь мир сразу заговорил о том, что наконец-то получится избавиться от привычных двигателей, которые что и делают – качают из людей деньги (когда нужно заправлять их) и загрязняют атмосферу. Данная модель способна развивать скорость 150 километров в час – и все это практически не используя топливо. Ведь все, что необходимо – это сделать 360 оборот магнитов, все остальное движение они будут делать самостоятельно.
Ведь все, что необходимо – это сделать 360 оборот магнитов, все остальное движение они будут делать самостоятельно.
Также хочется отметить, что срок службы этого двигателя практически неограничен, ведь вечные магниты за 10 лет теряют только 5% КПД, что делает их универсальными. Плюс ко всему, они являются практически бесшумными.
Магнитный мотор Говарда Джонсона
Магнитный мотор Говарда Джонсона
В своей работе и следующем за ней патенте на изобретение, Говард Джонсон использовал энергию, генерируемую потоком непарных электронов, присутствующих в магнитах для организации цепи питания мотора. Статор Джонсона представляет собой совокупность множества магнитов, дорожка расположения и движения которых будет зависеть от конструктивной компоновки агрегата Говарда Джонсона (линейной или роторной). Они закрепляются на специальной пластине с высокой степенью магнитной проницаемости. Одноименные полюса статорных магнитов направляются в сторону ротора. Это обеспечивает поочередное притяжение и отталкивание полюсов, а вместе с ними, момент и физическое смещение элементов статора и ротора относительно друг друга.
Организованный Говардом Джонсоном расчет воздушного зазора между ними позволяет корректировать магнитную концентрацию и силу взаимодействия в большую или меньшую сторону.
Характеристики магнитного мотоцикла
Поражают характеристики изобретения. Несмотря на массу преимуществ, которые демонстрируют электромобили, скоростными характеристиками они похвастаться не могут, в отличие от этого мотоцикла, разогнаться который может до 150 км. Работа его абсолютно бесшумна, что рисует заманчивую картину современных городов: тихие улочки, где отсутствует смог, характерный для работы двигателей внутреннего сгорания, отсутствие пробок, которыми «грешат» большие города. И она вполне сожжет стать реальностью, если Японии удастся запустить в серию разработанную новинку. Пока компания-производитель не сообщает ничего всем заинтересованным автолюбителям. Те, немногие фотографии – все, что известно о заинтриговавшем многих мотоцикле.
Те, немногие фотографии – все, что известно о заинтриговавшем многих мотоцикле.
Генератор Перендева
Генератор Перендева
Еще одним неоднозначным примером действия магнитных сил является самовращающийся магнитный двигатель Перендев. Его создатель Майк Брэди, до того, как в его отношении начали уголовное производство, даже успел обзавестись патентом, создать одноименную фирму (Перендев) и поставить дело на поток. Если анализировать представленную в патенте схему и принцип, или чертежи самодельных эл. двигателей, то ротор и статор имеют форму диска и внешнего кольца. На них по кольцевой траектории размещают отдельные магниты, соблюдая определенный угол относительно центральной оси. За счет взаимодействия поля отдельных магнитов статора и ротора Перендев, возникает момент и происходит их взаимное перемещение (вращение). Расчет цепи магнитов сводится к определению угла расхождения.
Как сделать магнитный двигатель
А теперь мы немного расскажем о том, как же его можно сделать. Скажем сразу – в сети вы не найдете нормальных инструкций. Если они представлены, то модель просто не собирается. Есть и более толковые инструкции, но там КПД слишком низкое или сделана ошибка. Собирая по всем этим инструкциям магнитные двигатели, людям не удалось сделать нормальную модель. Это вы должны понимать, кому-то явно не выгодно.
Скажем сразу – в сети вы не найдете нормальных инструкций. Если они представлены, то модель просто не собирается. Есть и более толковые инструкции, но там КПД слишком низкое или сделана ошибка. Собирая по всем этим инструкциям магнитные двигатели, людям не удалось сделать нормальную модель. Это вы должны понимать, кому-то явно не выгодно.
Как нам кажется, так лучше всего смотреть на патент Украинского ученного Ф.И. Свинтицкого под номером № 2086784. Посмотреть патент вы сможете на официальном сайте, где утверждаются все патенты в России. Вот ссылка на него https://ru-patent.info/20/85-89/2086784.html, здесь вы найдете подробную инструкцию о том, как его сделать. Поэтому если вам пришла в голову идея собрать его самостоятельно магнитный двигатель, берите всю информацию с этого источника. Только здесь она проверена (хотя не факт, могли специально сделать ошибку). Но, в любом случае, верить лучше непосредственно патенту, его просто так не выдают.
Синхронный двигатель на постоянных магнитах
Устройство синхронного двигателя на магнитах
Одним из основных видов электродвигателей является синхронный, частота вращения магнитных полей статора и ротора которого равны. У обычного электромагнитного мотора обе эти части состоят из обмоток на пластинах. Но если конструкцию якоря поменять и вместо катушки поставить постоянные магниты, то можно получить интересную, эффективную, действующую модель синхронного двигателя. Статор имеет привычную компоновку магнитопровода из пластин и обмоток, в которых способно генерироваться вращающееся магнитное поле от электрического тока. Ротор создает постоянное поле, которое взаимодействует с предыдущим, и создает крутящий момент.
У обычного электромагнитного мотора обе эти части состоят из обмоток на пластинах. Но если конструкцию якоря поменять и вместо катушки поставить постоянные магниты, то можно получить интересную, эффективную, действующую модель синхронного двигателя. Статор имеет привычную компоновку магнитопровода из пластин и обмоток, в которых способно генерироваться вращающееся магнитное поле от электрического тока. Ротор создает постоянное поле, которое взаимодействует с предыдущим, и создает крутящий момент.
Также следует отметить, что в зависимости от схемы, относительное расположение статора и якоря могут меняться, например, последний будет выполнен в форме внешней оболочки. Для пуска мотора от тока из сети используется цепь из магнитного пускателя (реле, контактора) и теплового защитного реле.
Реальные перспективы создания вечного двигателя на магнитах
Противники теории создания вечного двигателя говорят о невозможности нарушения закона о сохранении энергии. Действительно, нет совершенно никаких предпосылок к тому, чтобы получить энергию из ничего. С другой стороны, магнитное поле – это вовсе не пустота, а особый вид материи, плотность которого может достигать 280 кДж/м³. Именно это значение и является потенциальной энергией, которую теоретически может использовать вечный двигатель на постоянных магнитах. Несмотря на отсутствие готовых образцов в общем доступе, о возможности существования подобных устройств говорят многочисленные патенты, а также факт наличия перспективных разработок, которые остаются засекреченными еще с советских времен.
С другой стороны, магнитное поле – это вовсе не пустота, а особый вид материи, плотность которого может достигать 280 кДж/м³. Именно это значение и является потенциальной энергией, которую теоретически может использовать вечный двигатель на постоянных магнитах. Несмотря на отсутствие готовых образцов в общем доступе, о возможности существования подобных устройств говорят многочисленные патенты, а также факт наличия перспективных разработок, которые остаются засекреченными еще с советских времен.
Норвежский художник Рейдар Финсруд создал свой вариант вечного двигателя на магнитах К созданию подобных электрогенераторов приложили силы знаменитые физики-ученые: Никола Тесла, Минато, Василий Шкондин, Говард Джонсон и Николай Лазарев. Следует сразу оговориться, что создаваемые с помощью магнитов двигатели называются «вечными» условно — магнит теряет свои свойства через пару сотен лет, а вместе с ним прекратит работу и генератор.
Grundfos — Страница не найдена
НАСОСНОЕ
ОБОРУДОВАНИЕ
САЙТ ОФИЦИАЛЬНОГО
ДИЛЕРА И АВТОРИЗОВАННОГО
СЕРВИСНОГО ПАРТНЕРА
ГРУНДФОС — ЗАО СИНТО
Запрошенная Вами страница не найдена. Возможно, мы удалили или переместили ее. Возможно, вы пришли по устаревшей ссылке или неверно ввели адрес. Воспользуйтесь поиском или картой сайта.
Возможно, мы удалили или переместили ее. Возможно, вы пришли по устаревшей ссылке или неверно ввели адрес. Воспользуйтесь поиском или картой сайта.
- О компании
- Продукция
- Насосы для отопления и горячего водоснабжения
- Циркуляционные бессальниковые насосы
- Циркуляционные бессальниковые насосы для системс солнечным подогревателем
- Циркуляционные бессальниковые насосы для систем горячего водоснабжения
- Насосы с частотным регулированием
- Одноступенчатые центробежные насосы с соосными патрубками в линию «ин-лайн»
- Одноступенчатые центробежные насосы с частотно-регулируемым электродвигателем (оснащены датчиком перепада давления)
- Консольно-моноблочные насосы NB
- Консольно-моноблочные насосы NK, NKG
- Консольно-моноблочные и консольные насосы с частотно-регулируемым электродвигателем
- Насосы для кондиционирования и вентиляции
- Горизонтальные многоступенчатые насосы с мокрым ротором CHIU
- Горизонтальные многоступенчатые насосы CM
- Горизонтальные многоступенчатые насосы со встроенным частотным преобразователем CME
- Вертикальные многоступенчатые насосы CHV
- Вертикальные многоступенчатые насосы CR
- Вертикальные многоступенчатые насосы CRN, CRT
- Вертикальные многоступенчатые насосы со встроенным частотным преобразователем CRE, CRNE
- Циркуляционные бессальниковые насосы
- Циркуляционные бессальниковые насосы для систем горячего водоснабжения
- Одноступенчатые центробежные насосы с частотно-регулируемым электродвигателем (оснащены датчиком перепада давления)
- Одноступенчатые центробежные насосы с соосными патрубками в линию «ин-лайн»
- Консольно-моноблочные насосы NK, NKG
- Консольно-моноблочные и консольные насосы с частотно-регулируемым электродвигателем
- Насосы для бытового водоснабжения
- Трёхдюймовые скважинные насосы SQ, SQE
- Компактные насосные установки автоматического водоснабжения MQ
- Автоматические насосные установки Hydrojet
- Колодезные насосы SPO
- Бессальниковые повысительные насосы UPA
- Самовсасывающие садовые насосы JP
- Автоматические станции повышения давления в сети водоснабжения BCH
- Установки для автоматического водоснабжения с насосами CHV (Hydro Pack, Hydro Dome)
- Вертикальные многоступенчатые насосы CHV
- Установка для использования дождевой воды RMQ
- Циркуляционные насосы для бассейнов GP
- Насосы для дренажа и канализации
- Погружные дренажные насосы с корпусом из композитного материала Unilift CC
- Дренажные насосы с реле уровня Unilift KP
- Дренажные насосы из нержавеющей стали Unilift AP, AP 35B, AP 50B
- Установка для отвода конденсата Conlift
- Резервуары для размещения насосов Unilift KP / Unilift AP
- Насосные установки для водоотведения и канализации SOLOLIFT2
- Комплектные канализационные насосные установки Multilift MSS/MLD, M/MD
- Комплектные канализационные насосные установки Multilift MD1/MDV
- Комплектные канализационные станции PUST
- Канализационные насосы из чугуна с режущим механизмом SEG
- Дренажные и канализационные насосы из чугуна DWK, SLV
- Канализационные насосы с кожухом двигателя из чугуна и нержавеющей стали
- Насосы для перекачивания сточных вод S, SV
- Насосы для водоотведения при строительных и дренажных работах
- Осевые и полуосевые насосы KPL, KWM
- Мешалки и образователи потока AMD, AMG, AFG
- Погружные рециркуляционные насосы SRP
- Комплектные канализационные станции
- Станции повышения давления PBS в стеклопластиковом резервуаре
- Аэраторы AEROJET
- Насосы для промышленного применения
- Мешалки и образователи потока AMD, AMG, AFG
- Аксиально-поршневые насосы BMP
- 4-, 6-, 8-дюймовые модули для повышения давления
- Высоконапорные системы для обратного осмоса BME, BMET
- Высоконапорные системы для опреснения морской воды BMEX
- Горизонтальные многоступенчатые насосы с мокрым ротором CHIU
- Горизонтальные многоступенчатые насосы CM
- Горизонтальные многоступенчатые насосы со встроенным частотным преобразователем CME
- Вертикальные многоступенчатые насосы CHV
- Многоступенчатые насосы в гигиеническом исполнении HILGE Contra
- Вертикальные многоступенчатые насосы CR
- Вертикальные многоступенчатые насосы CRN, CRT
- Вертикальные многоступенчатые насосы со встроенным частотным преобразователем CRE, CRNE
- Цифровые диафрагменные дозировочные насосы DME LA, DDI LA
- Диафрагменные механические и гидромеханические дозировочные насосы DMX, DMH
- Дренажные и канализационные насосы из чугуна DWK, SLV
- Многоступенчатые насосы в гигиеническом исполнении HILGE durietta
- Насосы для водоотведения при строительных и дренажных работах
- Одноступенчатые насосы в гигиеническом исполнении HILGE Euro-HYGIA
- Установки повышения давления со шкафом управления
- Одноступенчатые центробежные насосы с частотно-регулируемым электродвигателем
- Одноступенчатые консольные и консольно-моноблочные насосы HILGE MAXA, MAXANA
- Одноступенчатые консольно-моноблочные промышленные насосы MTB
- Консольно-моноблочные насосы NB
- Консольно-моноблочные и консольные насосы с частотно-регулируемым электродвигателем
- Консольно-моноблочные насосы NK, NKG
- Кулачковые насосы в гигиеническом исполнении HILGE NOVAIobe
- Насосы для перекачивания сточных вод S, SV
- Осевые и полуосевые насосы KPL, KWM
- Погружные рециркуляционные насосы SRP
- Самовсасывающие насосы в гигиеническом исполнении HILGE SIPLA
- Вертикальные полупогружные многоступенчатые насосы
- Вертикальные полупогружные многоступенчатые насосы с частотным регулированием MTRE
- Мембранные напорные баки GT, GT-HR, D, DI/T5
- Насосы для охраны окружающей среды
- Вертикальные многоступенчатые насосы CR
- Вертикальные многоступенчатые насосы CRN, CRT
- Вертикальные многоступенчатые насосы со встроенным частотным преобразователем CRE, CRNE
- 2-дюймовые для защиты окружающей среды MP1
- Скважинные насосы для агрессивных сред SQE-NE, SP-NE
- Насосы для дозирования
- Цифровые диафрагменные дозировочные насосы DME LA, DDI LA
- Диафрагменные механические и гидромеханические дозировочные насосы DMX, DMH
- Универсальные станции дозирования DSS, исполнение на планшете
- Универсальные станции дозирования, исполнение на емкости DTS
- Нестандартные станции дозирования DDS, по индивидуальному запросу
- Насосы для повышения давления и водоснабжения
- 4-, 6-, 8-дюймовые модули для повышения давления
- Высоконапорные системы для обратного осмоса BME, BMET
- Высоконапорные системы для опреснения морской воды BMEX
- Горизонтальные многоступенчатые насосы с мокрым ротором CHIU
- Горизонтальные многоступенчатые насосы CM
- Горизонтальные многоступенчатые насосы со встроенным частотным преобразователем CME
- Вертикальные многоступенчатые насосы CHV
- Установки для автоматического водоснабжения с насосами CHV (Hydro Pack, Hydro Dome)
- Вертикальные многоступенчатые насосы CR
- Вертикальные многоступенчатые насосы CRN, CRT
- Вертикальные многоступенчатые насосы со встроенным частотным преобразователем CRE, CRNE
- Циркуляционные насосы для бассейнов GP
- Установки повышения давления со шкафом управления
- Одноступенчатые центробежные насосы с частотно-регулируемым электродвигателем
- Компактные насосные установки автоматического водоснабжения MQ
- Консольно-моноблочные насосы NB
- Консольно-моноблочные и консольные насосы с частотно-регулируемым электродвигателем
- Консольно-моноблочные насосы NK, NKG
- Осевые и полуосевые насосы KPL, KWM
- 4-, 6-, 8-, 10- и 12-дюймовые скважинные насосы SPA, SP, SP-G
- Трёхдюймовые скважинные насосы SQ, SQE
- Мембранные напорные баки GT, GT-HR, D, DI/T5
- Насосы для пожаротушения
- Дизель-насосные установки пожаротушения FK, HSC, HSF, DNF
- Комплектные насосные установки для систем пожаротушения Hydro MX
- Hydro Solo FS (жокей-насос)
- Насосы для водоподготовки и дезинфекции
- 4-, 6-, 8-дюймовые модули для повышения давления
- Высоконапорные системы для обратного осмоса BME, BMET
- Высоконапорные системы для опреснения морской воды BMEX
- Горизонтальные многоступенчатые насосы с мокрым ротором CHIU
- Горизонтальные многоступенчатые насосы CM
- Горизонтальные многоступенчатые насосы со встроенным частотным преобразователем CME
- Вертикальные многоступенчатые насосы CR
- Вертикальные многоступенчатые насосы CRN, CRT
- Универсальные станции дозирования DSS, исполнение на планшете
- Универсальные станции дозирования, исполнение на емкости DTS
- Нестандартные станции дозирования DDS, по индивидуальному запросу
- Установки приготовления и дозирования реагентов (флокулянтов, коагулянтов, и т. д.) Polydos, KD
- Цифровые диафрагменные дозировочные насосы DME LA, DDI LA
- Диафрагменные механические и гидромеханические дозировочные насосы DMX, DMH
- Контрольно-измерительное оборудование Conex, DIP, DIT
- Системы дезинфекции
- Насосы для подачи воды из скважин
- 4-, 6-, 8-, 10- и 12-дюймовые скважинные насосы SPA, SP, SP-G
- Трёхдюймовые скважинные насосы SQ, SQE
- Мембранные напорные баки GT, GT-HR, D, DI/T5
- Шкафы управления и автоматика для насосов
- Шкафы управления с интеллектуальной системой MultiPumpControl
- Шкафы управления пожарными насосами
- Шкафы управления насосами для водоснабжения Control MP204
- Шкафы управления насосами в системах дренажа и канализации Control WW
- Шкафы управления насосами в системах дренажа и канализации LC/LCD
- Шкафы управления мешалками Control Mix
- Устройство для защиты от «сухого хода»
- Инфракрасный пульт дистанционного управления для настройки и контроля параметров насоса
- Преобразователи частоты CUE
- Блок комплексной защиты электродвигателя МР 204
- Интерфейсы передачи данных CIM/CIU
- Шкафы управления с интеллектуальной системой DEDICATED CONTROL для дренажных и канализационных насосов
- Насосы для отопления и горячего водоснабжения
- Сервис
- Каталог сервисных комплектов
- Заявка на сервисные услуги и заказ запасных частей
- Аудит насосных систем
- Материалы
- Книги и учебные пособия
- ВОДОПОДГОТОВКА И ОБОРУДОВАНИЕ GRUNDFOS. Основные понятия и определения. Дозирование и дезинфекция
- Водоснабжение вашего дома (Популярное руководство)
- Инженерные системы зданий.
- Насосы для водоотведения. Техническое пособие
- Определение требуемых расходов и напоров насосов и насосных станций для внутренних систем зданий (согласно нормам РФ)
- Системы отопления частных домов
- Cистемы водоснабжения частных домов
- Система канализации и водоотведения частных домов
- Промышленное насосное оборудование
- Системы отопления зданий
- Теоретические основы гидравлики
- Теория и практика систем водоотведения
- Теория перекачивания жидкостей
- Техническое пособие по скважинным насосам
- Торцевые уплотнения вала насосов
- Электродвигатели
- РУКОВОДСТВО ПО ПОДБОРУ СИСТЕМ УПРАВЛЕНИЯ НАСОСАМИ.
- ВОДОПОДГОТОВКА И ОБОРУДОВАНИЕ GRUNDFOS.
- Книги и учебные пособия
- Акции
- Контакты
 д.) Polydos, KD
д.) Polydos, KD Основные понятия и определения. Дозирование и дезинфекция
Основные понятия и определения. Дозирование и дезинфекция
ИЗБРАННОЕ: |
Ну вот собственно и он.
Признаюсь сборка несколько грубовата, но для первой модели сойдет.
ниже будет видео, все будет понятно.
А вот и собственно схемка и видео два в одном, изучайте.
. …… ……. Вот они три первых красавца Смотрим дальше
| |||||
|---|---|---|---|---|---|---|
| ||||||
 Надо отметить, что ранее к этому творчеству я относился как к хобби, уделяя лишь малую часть свободного от работы и других важных дел времени, т.е. примерно несколько часов в неделю. Что крайне мало, потому что собрать приличную модель с первого раза, не имея подобного опыта очень тяжело.
Надо отметить, что ранее к этому творчеству я относился как к хобби, уделяя лишь малую часть свободного от работы и других важных дел времени, т.е. примерно несколько часов в неделю. Что крайне мало, потому что собрать приличную модель с первого раза, не имея подобного опыта очень тяжело. И еще, не судите строго — это же мой первый Стирлинг.
И еще, не судите строго — это же мой первый Стирлинг.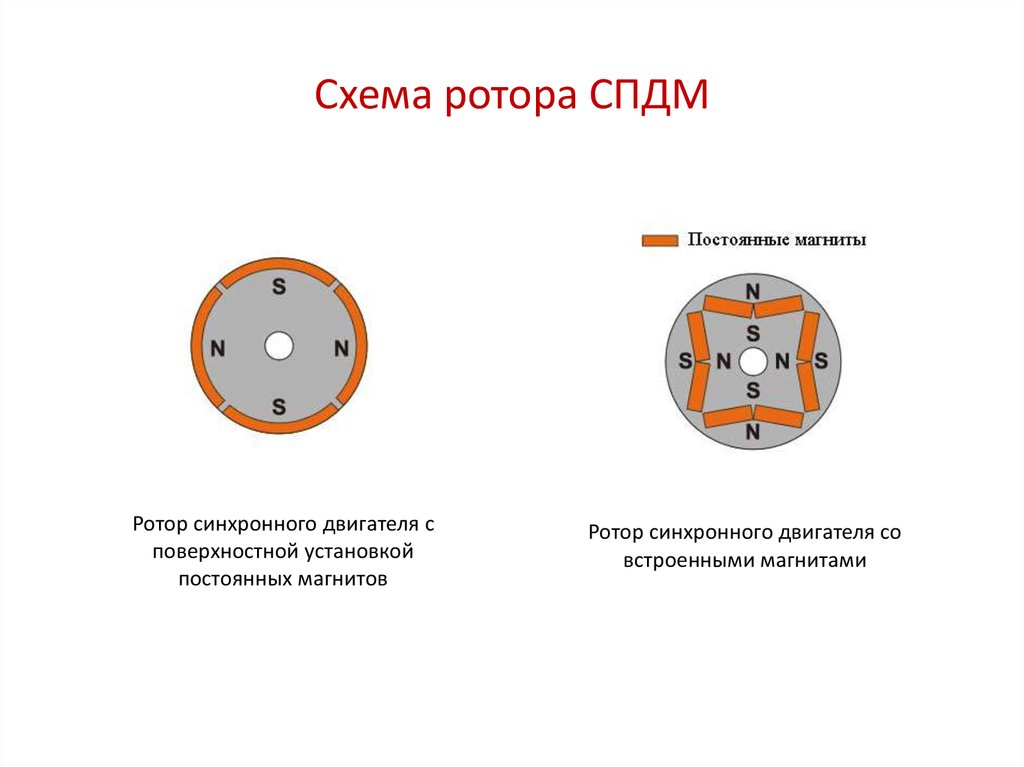 Эта одна свечка, способна создать разницу температур, между нагреваемой и охлаждаемой сторонами двигателя, более сотни градусов, а это может заставить работать даже очень плохо собранный Стирлинг. Другое дело научить этот движок высасывать энергию из практически дармовых источников, работать на перепаде температур буквально в несколько градусов.
Эта одна свечка, способна создать разницу температур, между нагреваемой и охлаждаемой сторонами двигателя, более сотни градусов, а это может заставить работать даже очень плохо собранный Стирлинг. Другое дело научить этот движок высасывать энергию из практически дармовых источников, работать на перепаде температур буквально в несколько градусов.

 …..
….. ru; ник в Skype «Physicstoys «, моб тел. (+38) 067- 393-13- 82 Игорь. Харьков
ru; ник в Skype «Physicstoys «, моб тел. (+38) 067- 393-13- 82 Игорь. ХарьковСхемы управления электроприемниками при помощи магнитного пускателя. Основы автоматики.
Включение
электродвигателя в сеть при помощи
обычного выключателя, дает ограниченные
возможности, так как выключателем нельзя
коммутировать большие токи. Например
при снятии тока в 5А возникает дуга
длиной 2см, которая может зажечь материал.
В случае аварийного отключения
электроэнергии (например, перегорают
предохранители), машина перестает
работать, но после устранения неисправности
сети двигатель запускается уже без
команды человека. Это может привести к
несчастному случаю. В таких случаях
необходимо применять нулевую защиту –
отключение при пропадании напряжения.
Для управления большими токами применяют
силовые реле –контакторы или по другому
магнитные пускатели. В них смыкание и
размыкание контактов происходит быстро,
что сокращает время горения дуги. Кроме
Кроме
того в контакторах приняты меры по
предотвращению появления дуги
–дугогасительные камеры. Управление
силовыми контактами производится
относительно слабым управляющим током
катушки. В связи с этим введено понятие
силовых цепей
и цепей
управления.
К силовым цепям относятся все части,
ведущие ток к нагрузке (провода, контакты,
измерительные и контролирующие приборы).
Все провода и аппаратура управления,
контроля и сигнализации относятся к
цепям управления. Рассмотрим схему
включения электродвигателя при помощи
магнитного пускателя. После включения
разъединителя Q1 силовые цепи и цепи
управления получат питание. При нажатии
на кнопку «Пуск» S1 по обмотке К1 пойдет
ток и замкнутся контакты К1-1 и К1-2.
Двигатель включится в работу. После
отпускания кнопки S1ток через обмотку
не прекратится, а будет проходить через
контакты К1-1, которые удерживаются в
замкнутом положении этой же обмоткой.
При нажатии на кнопку «Стоп» S2,
разомкнется цепь обмотки. Магнитное
поле удерживающее контакты К1-1 и К1-2
исчезнет и контакты разомкнуться. Если
Если
же пропадет внешнее питание, или перегорят
предохранители, то двигатель отключится.
Но после устранения неисправности сети
двигатель не включится самостоятельно
без участия человека, поскольку цепь
питания катушки разомкнута. Так
реализована нулевая защита.
Основы автоматики.
Часто автоматические системы повторяют
схему обычного магнитного пускателя.
Если вместо двигателя в схему будет
включен нагреватель, а вместо кнопок
датчики температуры, замыкающие или
размыкающие контакты при определенной
температуре, то получим систему,
автоматически поддерживающую температуру.
Если, например, вместо кнопок в схему
включить датчики давления, замыкающие
и размыкающие контакты при определенном
давлении, которые будут смонтированы
на резервуаре со сжатым воздухом, а
управлять эта схема будет компрессором,
то такая система будет поддерживать в
заданных пределах давление в резервуаре.
Наиболее
часто встречающиеся на практике чертежи
это: чертеж детали (деталировочный
чертеж), сборочный чертеж, монтажный
чертеж, а так же технологические
планировки и схемы.
Чертеж
детали
содержит все необходимые данные для
изготовления и контроля этой детали.
Сборочный
чертеж
содержит все необходимые данные для
понимания принципа работы прибора или
устройства его сборки и контроля.
Сборочный чертеж содержит сведения о
том, как все детали сопрягаются и
взаимодействуют между собой, габаритные
и присоединительные размеры, наименование
всех деталей и материалов, необходимых
для сборки, а так же другие сведения.
Монтажный
чертеж
содержит сведения по монтажу прибора
или устройства, его габаритные и
присоединительные размеры. Например,
монтажный чертеж (схема) по монтажу
уровнемера на емкость может содержать
сведения о том, как уровнемер располагается
на емкости относительно других частей
емкости. На каком расстоянии от стенки,
на какой высоте, под каким углом к оси
емкости должен быть сориентирован
уровнемер. Каким должно быть по форме
и размеру отверстие, в которое помещается
уровнемер.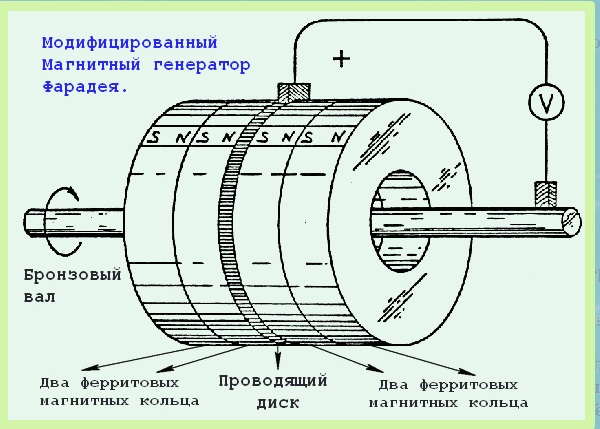 Какие необходимы крепежные
Какие необходимы крепежные
детали и материалы для монтажа уровнемера.
Технологические
планировки и схемы
содержат план производственного участка,
здания и изображение технологических
машин, устройств, инженерных коммуникаций
и т.п. на этом плане.
Например:
Топология полевых датчиков содержит
план производственного участка, на
котором обозначено расположение датчиков
и проложенные к ним кабели.
Принципы
построения чертежа.
Для построения чертежа объекта его
мысленно помещают внутрь воображаемого
куба. Мысленно переносится (проецируется)
изображение каждой из сторон объекта
(детали) на внутреннюю поверхность
граней куба. После чего куб мысленно
разворачивается и получаются все шесть
возможных изображений объекта по шести
граням куба. Чаще всего достаточно
одного двух или трех изображений. Чтобы
показать в достаточной мере всю
пространственную форму объекта создают
дополнительные виды и разрезы и сечения.
Правила создания чертежа регламентируются
стандартами, ГОСТами. В частности ЕСКД
В частности ЕСКД
–Единой Системой Конструкторской
Документации. Главный принцип при
построении чертежа –удобство чтения
и понимания всей информации содержащейся
в нем. Для этих целей применяется
унифицированное и упрощенное изображение
некоторых элементов на чертеже. Чертежи
выполняются в масштабе. Чертеж выполненный
от руки без соблюдения масштабов но с
соблюдением пропорций называется
эскизом.
В
настоящее время при проектировании
кроме плоских двумерных чертежей
применяют трехмерное изображение
выполненное с помощью САПР (Систем
Автоматизированного Проектирования)
Компас, AutoCAD, Proingeneer,
SolidWorks,
3DMax.
Вечный двигатель — презентация онлайн
1. Вечный двигатель
Подготовила: ученица 11“A” класса
Рябоконь Алёна
2. Оглавление
Введение
Цели и задачи
Понятия о вечном двигателе
Примеры вечных двигателей
Современные вечные двигатели
Источники информации
3. Введение
• Давно известно, что идея вечного двигателя
неосуществима, однако она очень интересна и
познавательна с точки зрения истории развития
науки и технологий.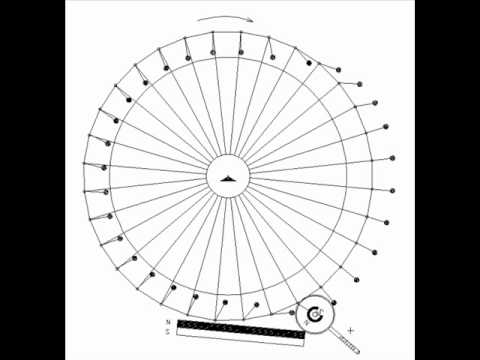 Ведь в поисках вечного
Ведь в поисках вечного
двигателя ученые смогли лучше понять
основные физические принципы. Более того,
изобретатели вечного двигателя являются
яркими примерами для изучения некоторых
аспектов человеческой психологии:
изобретательности, настойчивости, оптимизма и
фанатизма
4. Цели и задачи :
Цель: «Ответить на вопрос: Можно ли
создать вечный двигатель?».
Для достижения этой цели мне необходимо
выполнить следующие задачи:
Узнать, что такое вечный двигатель.
Рассмотреть чертежи вечных двигателей.
Узнать, почему они не работают.
Рассмотреть вечные двигатели в
современности
5. Вечный двигатель (perpetuum mobile, perpetual motion machine) – устройство, основанное на механических, химических,
Понятие о вечном двигателе
Вечный двигатель
(perpetuum mobile, perpetual
motion machine) –
устройство, основанное на
механических, химических,
электрических или иных
физических процессах.
Будучи запущенным,
единожды, он сможет
работать вечно и
остановится только при
воздействии на него извне.
6. Вечные двигатели делятся на 2 большие группы:
Вечные двигатели первого
рода не извлекают
энергию из окружающей
среды (например, тепло),
при этом физическое и
химическое состояние
его частей также
остается неизменным.
Машины такого рода не
могут существовать
исходя из первого
закона термодинамики.
Вечные двигатели второго
рода извлекают тепло из
окружающей среды и
превращают его в энергию
механического движения.
Такие устройства не могут
существовать исходя из
второго закона
термодинамики.
7. Примеры вечных двигателей
В настоящее время
прародиной первых
вечных двигателей по
праву считается
Индия, а первым
изобретателем
Бхаскара
Схемы первых вечных
двигателей строились на
основе простых
механических элементов и
даже в более поздние
времена включали в себя
рычаги, которые
закреплялись по окружности
колеса, вращавшегося вокруг
горизонтальной оси.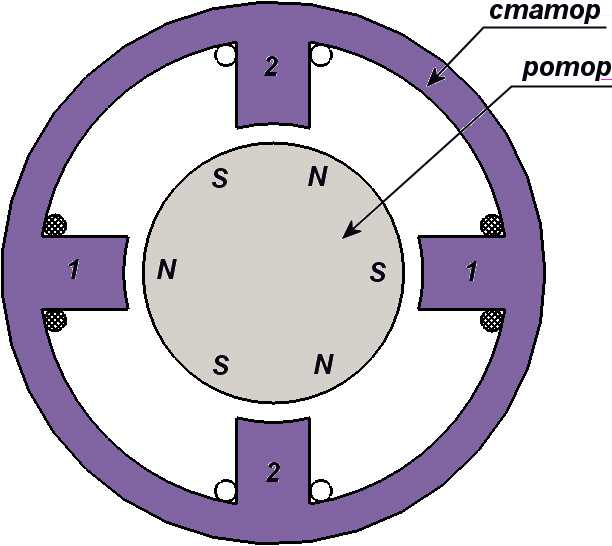
Наиболее ранние сведения о вечных
двигателях
Попытки исследования места, времени и
причины
возникновения
идеи
вечного
двигателя — задача весьма сложная. К самым
ранним сведениям о перпетуум мобиле
относится, упоминание, которое мы находим у
индийского поэта, математика и астронома
Бхаскары. Так, Бхаскара описывает некое
колесо с прикрепленными наискось по ободу
длинными, узкими сосудами, наполовину
заполненными ртутью. Принцип действия
этого первого механического перпетуум
мобиле был основан на различии моментов
сил
тяжести,
создаваемых
жидкостью,
перемещавшейся в сосудах, помещенных на
окружности колеса. Бхаскара обосновывает
вращение
колеса
весьма
просто:
«Наполненное таким образом жидкостью
колесо, будучи насажено на ось, лежащую на
двух неподвижных опорах, непрерывно
вращается само по себе».
Вечный двигатель №1. Колесо с
откидывающимися грузами
Идея изобретателя: Идея основана на
применении колеса с неуравновешенными
грузами. К краям колеса прикреплены откидные
К краям колеса прикреплены откидные
палочки с грузами на концах. При всяком
положении колеса грузы на правой стороне
будут откинуты дальше от центра, нежели на
левой; эта половина, следовательно, должна
перетягивать левую и тем самым заставлять
колесо вращаться. Значит, колесо будет
вращаться вечно, по крайней мере, до тех пор,
пока не перетрется ось.
Почему двигатель не работает: Грузы на
правой стороне всегда дальше от центра,
однако неизбежно такое положение колеса, при
котором число этих грузов меньше, чем на
левой. Тогда система уравновешивается —
следовательно, колесо не будет вращаться, а,
сделав несколько качаний, остановится.
Вечный двигатель №2. Цепочка шаров на
треугольной
Идея изобретателя: Через
трехгранную призму перекинута
цепь из 14 одинаковых шаров.
Слева четыре шара, справа — два.
Остальные восемь шаров
уравновешивают друг друга.
Следовательно, цепь придет в
вечное движение против часовой
стрелки.
Почему двигатель не работает: Грузы приводит в
движение только составляющая силы тяжести, параллельная
наклонной поверхности. На более длинной поверхности
больше грузов, но и угол наклона поверхности
пропорционально меньше. Поэтому они равны
Вечный двигатель №4. Цепочка
поплавков
Идея
изобретателя:
Высокая
башня
наполнена
водой.
Через
шкивы,
установленные вверху и внизу башни,
перекинут канат с 14 полыми кубическими
ящиками со стороной 1 метр. Ящики,
находящиеся в воде, под действием силы
Архимеда, направленной вверх, должны
последовательно всплывать на поверхность
жидкости, увлекая за собой всю цепь, а
находящиеся слева ящики спускаются вниз
под действием силы тяжести. Таким
образом, ящики попадают попеременно из
воздуха в жидкость и наоборот.
Почему двигатель не работает: Ящики, входящие в жидкость, встречают
сильное противодействие со стороны жидкости, причем работа на
проталкивание их в жидкость не меньше работы, совершаемой силой
Архимеда при всплывании ящиков на поверхность.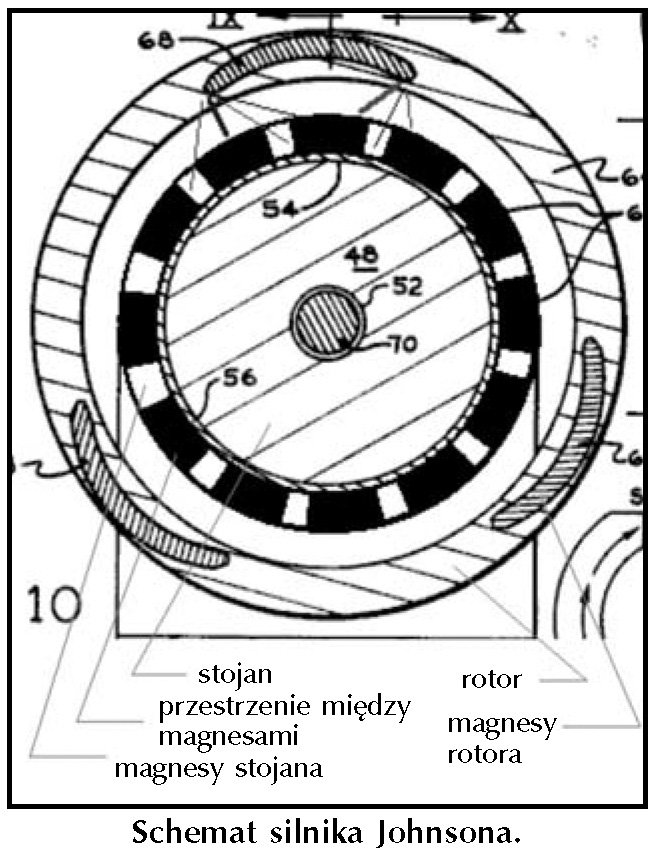
Вечный двигатель №5. Архимедов винт и
водяное колесо
Идея изобретателя: Архимедов винт,
вращаясь, поднимает воду в верхний
бак, откуда она вытекает из лотка
струей,
попадающей
на
лопатки
водяного колеса. Водяное колесо
вращает
точильный
камень
и
одновременно двигает, с помощью
ряда зубчатых колес, тот самый
Архимедов винт, который поднимает
воду в верхний бак. Винт поворачивает
колесо, а колесо — винт! Этот проект,
изобретенный еще в 1575 году
итальянским
механиком
Страдою
Старшим,
затем
повторялся
в
многочисленных вариациях.
Почему двигатель не работает: Большая часть проектов вечных
двигателей действительно могла бы работать, если бы не существование
силы трения.
Вечный двигатель №6. Магнит и
Идея изобретателя: Сильный магнит
желоба
помещается на подставке. К ней
прислонены два наклонных желоба, один
под другим, причем верхний желоб имеет
небольшое отверстие в своей верхней
части, а нижний на конце изогнут. Если на
Если на
верхний желоб положить небольшой
железный шарик, то вследствие
притяжения магнитом он покатится вверх,
однако, дойдя до отверстия, провалится в
нижний желоб, скатится по нему,
поднимется по конечному закруглению и
вновь попадет на верхний желоб. Таким
образом, шарик будет бегать непрерывно,
осуществляя тем самым вечное движение.
Проект этого магнитного двигателя описал
в XVII веке английский епископ Джон
Вилкенс.
Почему двигатель не
работает: Устройство
работало бы, если бы
магнит действовал на
металлический шарик
только во время его
подъема на подставку по
верхнему желобу. Но
вниз шарик скатывается
замедленно под
действием двух сил:
тяжести и магнитного
притяжения. Поэтому к
концу спуска он не
приобретет скорость,
необходимую для
поднятия по закруглению
нижнего желоба и
начала нового цикла.
Вечный двигатель № 9. Автоматический
подзавод часов
Идея изобретателя: Основа
устройства — ртутный барометр крупных
размеров: чаша с ртутью, подвешенная в
раме, и опрокинутая над ней горлышком
вниз большая колба с ртутью. Сосуды
Сосуды
укреплены подвижно один относительно
другого; при увеличении атмосферного
давления колба опускается и чаша
поднимается, при уменьшении же
давления — наоборот. Оба движения
заставляют вращаться небольшое
зубчатое колесо всегда в одну сторону и
через систему зубчатых колес поднимают
гири часов.
Почему это не вечный двигатель: Необходимая для работы часов энергия
«черпается» из окружающей среды. По сути это мало чем отличается от
ветряного двигателя — разве что исключительно малой мощностью.
Вечный двигатель № 10. Масло,
поднимающееся по фитилям
Идея изобретателя: Жидкость,
налитая в нижний сосуд, поднимается
фитилями в верхний сосуд, имеющий
желоб для стока жидкости. По стоку
жидкость падает на лопатки колеса,
приводя его во вращение. Далее
стекшее вниз масло снова поднимается
по фитилям до верхнего сосуда. Таким
образом, струя масла, стекающая по
желобу на колесо, ни на секунду не
прерывается, и колесо вечно должно
находиться в движении
Почему это не вечный двигатель: С верхней, загнутой части фитиля
жидкость стекать вниз не будет. Капиллярное притяжение, преодолев силу
Капиллярное притяжение, преодолев силу
тяжести, подняло жидкость вверх по фитилю — но ведь та же причина
удерживает жидкость в порах намокшего фитиля, не давая ей капать с него.
Современные вечные двигатели
Магнитный вечный двигатель
В Европе первые сведения о
создании вечного магнитного
двигателя возникли также от
важной персоны. Данное известие
поступило в 13 веке, от Виллара
д’Оннекура. Это был величайший
французский архитектор и
инженер. Он, как и многие деятели
того века занимался различными
делами, которые соответствовали
профилю его профессии. Кроме
того, он оставил после себя
альбом, в котором оставил
чертежи и рисунки потомкам.
Данная книга хранится в Париже, в
национальной библиотеке
Вечный двигатель в часах
Французская академия наук, отказавшаяся когда-то
принимать на рассмотрение проекты вечных
двигателей, тем самым притормозила технический
прогресс, надолго задержав появление целого
класса удивительных механизмов и технологий.
Лишь немногие разработки сумели пробить себе
дорогу сквозь этот заслон.
Одна из них — не требующие завода часы, которые по
иронии судьбы сегодня выпускаются именно во
Франции.
Источником энергии служат колебания температуры воздуха и
атмосферного давления в течение дня. Специальная герметическая
емкость в зависимости от изменения среды слегка «дышит». Эти движения
передаются на ходовую пружину, подзаводя ее.
Механизм продуман так тонко, что изменение температуры всего на один
градус обеспечивает ход часов в течение двух последующих суток. При
условии исправности этот механизм будет функционировать ровно
столько, сколько светит Солнце и существует Земля, то есть практически
вечно.
Ошибки «вечных» двигателей
Изменение внутренней энергии системы при переходе её из одного
состояния в другое равно сумме работы внешних сил и количества
теплоты, переданного системе и не зависит от способа, которым
осуществляется этот переход. (Первое начало термодинамики)
(Первое начало термодинамики)
«Невозможен
круговой процесс,
единственным
результатом
которого было бы
производство
работы за счет
охлаждения
теплового
резервуара»
(Второе начало
термодинамики )
Понимание электрических чертежей
Цели
1. Распознавать символы, часто используемые на схемах двигателя и управления.
2. Читать и строить лестничные диаграммы.
3. Прочтите монтажные, однолинейные и блок-схемы.
4. Ознакомьтесь с клеммными соединениями для различных типов
двигателей.
5. Интерпретируйте информацию, указанную на заводских табличках двигателя.
6. Ознакомьтесь с терминологией, используемой в схемах двигателей.
7. Понимание работы ручных и магнитных пускателей двигателей.
При работе с двигателями используются различные виды электрических чертежей.
и схемы их управления.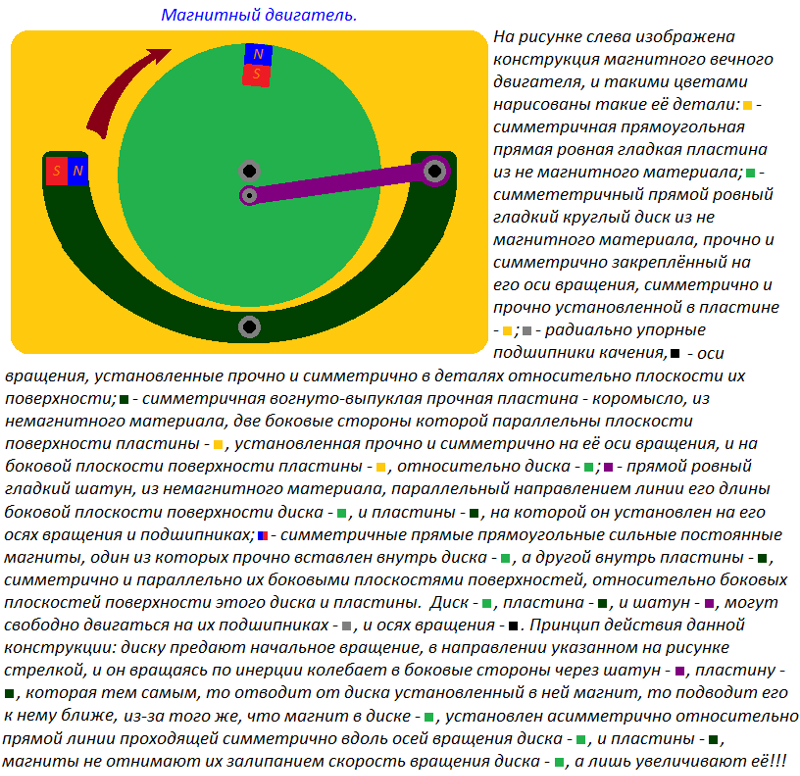 Для облегчения создания и чтения
Для облегчения создания и чтения
электрические чертежи, используются определенные стандартные обозначения.
Чтобы читать чертежи электродвигателя, необходимо знать как значение
символов и как работает оборудование.
Этот раздел поможет вам понять использование символов в электротехнике.
рисунки. В этом разделе также объясняется моторная терминология и иллюстрируется
это с практическими приложениями.
ЧАСТЬ 1 Символы – Сокращения – Лестничные диаграммы
Символы двигателя
Цепь управления двигателем может быть определена как средство подачи питания
к и отключению питания от двигателя. Символы, используемые для обозначения
различные компоненты системы управления двигателем можно рассматривать как тип
технической стенографии.
Использование этих символов делает электрические схемы менее сложными.
и легче читать и понимать.
В системах управления двигателями символы и соответствующие линии показывают, как
цепи соединены друг с другом. К сожалению, не все электрические
и электронные символы стандартизированы. Вы найдете немного другое
символы, используемые разными производителями. Кроме того, символы иногда выглядят
ничего похожего на настоящую вещь, так что вы должны узнать, что означают символы.
ФГР. 1 показаны некоторые типичные символы, используемые на принципиальных схемах двигателей.
Сокращения моторных терминов
Аббревиатура — это сокращенная форма слова или фазы. Заглавные буквы
используются для большинства сокращений. Ниже приведен список некоторых из
аббревиатуры, обычно используемые на схемах электродвигателей.
Переменный ток переменного тока ARM якорь AUTO автоматический выключатель BKR COM общий
Реле управления CR Трансформатор тока CT Постоянный ток постоянного тока Динамическое торможение DB
FLD поле FWD вперед GRD заземление Мощность л. с. L1, L2, L3 соединения линии электропередач
с. L1, L2, L3 соединения линии электропередач
Концевой выключатель LS MAN ручной MTR двигатель M пускатель двигателя NEG отрицательный NC нормально
замкнут NO нормально разомкнут OL реле перегрузки PH фаза PL сигнальная лампа POS
положительная мощность PWR PRI первичная кнопка PB
REC выпрямитель REV обратный RH реостат SSW защитный выключатель SEC вторичный
1PH однофазный соленоид SOL SW переключатель T1, T2, T3 соединения клемм двигателя
3PH трехфазный трансформатор TD с выдержкой времени TRANS
Схемы лестницы двигателя
Чертежи управления двигателем содержат информацию о работе схемы, устройстве
и расположение оборудования, а также инструкции по подключению. Символы, используемые для представления
коммутаторы состоят из узловых точек (мест, где устройства схемы подключаются к
друг друга), контактные полосы и специальный символ, который идентифицирует
определенный тип переключателя, как показано на FGR. 2.
2.
Хотя устройство управления может иметь более одного набора контактов, только
контакты, используемые в схеме, представлены на контрольных чертежах.
Различные схемы управления и чертежи используются для установки, обслуживания,
и устранять неисправности в системах управления двигателем. К ним относятся лестничные диаграммы,
электрические схемы, линейные схемы и блок-схемы. «Лестничная диаграмма» (рассматривается
некоторыми как схематическая диаграмма) фокусируется на электрической операции
схемы, а не физического местоположения устройства. Например, два
кнопки остановки могут физически находиться на противоположных концах длинного конвейера,
но электрически бок о бок на лестничной диаграмме.
Лестничные диаграммы, такие как показанная в FGR. 3, нарисованы двумя
вертикальные линии и любое количество горизонтальных линий. Вертикальные линии
(называемые рельсами) подключаются к источнику питания и обозначаются как линия
1 (L1) и линия 2 (L2).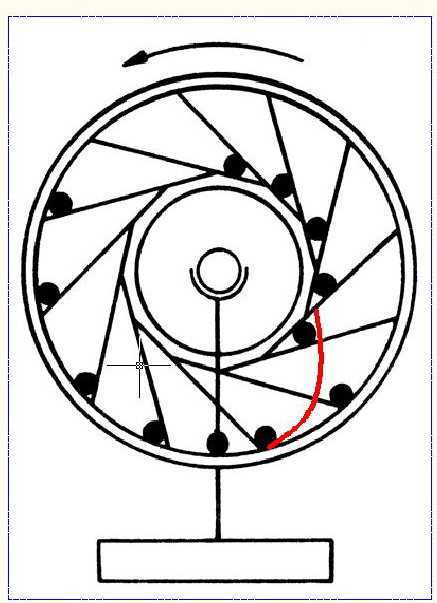 Горизонтальные линии (называемые перекладинами) соединены
Горизонтальные линии (называемые перекладинами) соединены
через L1 и L2 и содержат схему управления.
Лестничные диаграммы предназначены для чтения как книга, начиная с
вверху слева и чтение слева направо и сверху вниз.
Поскольку лестничные диаграммы легче читать, они часто используются при отслеживании
посредством работы цепи. Самые программируемые логические контроллеры
(ПЛК) используют концепцию лестничных диаграмм в качестве основы для своего программирования.
язык.
ФГР. 1 Символы управления двигателем.
ФГР. 2 Переключите части компонентов символа.
ФГР. 3 Типовая лестничная диаграмма.
ФГР. 4 Силовая и управляющая проводка двигателя.
Большинство лестничных диаграмм иллюстрируют только однофазную цепь управления.
подключен к L1 и L2, а не к трехфазной цепи питания
двигатель. ФГР. 4 показаны проводка силовой цепи и цепи управления.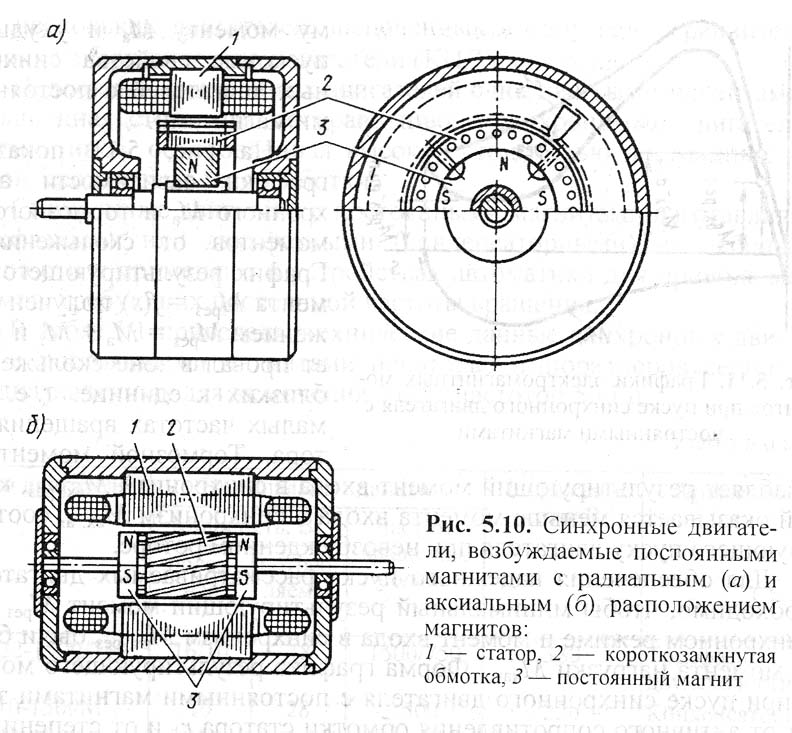
На схемах, включающих проводку силовых цепей и цепей управления, вы можете увидеть
линии как с тяжелым, так и с легким проводом. Жирные линии используются для
силовая цепь с большим током и более легкие линии для слаботочной
цепь управления.
Представлены проводники, пересекающиеся друг с другом, но не имеющие электрического контакта.
пересекающимися линиями без точки.
Соприкасающиеся проводники обозначаются точкой на стыке.
В большинстве случаев управляющее напряжение получают непосредственно от источника питания.
цепи или от понижающего управляющего трансформатора, подключенного к силовой
схема.
Использование трансформатора позволяет использовать более низкое напряжение (120 В переменного тока) для управления.
цепи при питании трехфазной цепи питания двигателя с более высоким
напряжения (480 В переменного тока) для более эффективной работы двигателя.
Лестничная диаграмма дает необходимую информацию для легкого следования
последовательность работы схемы.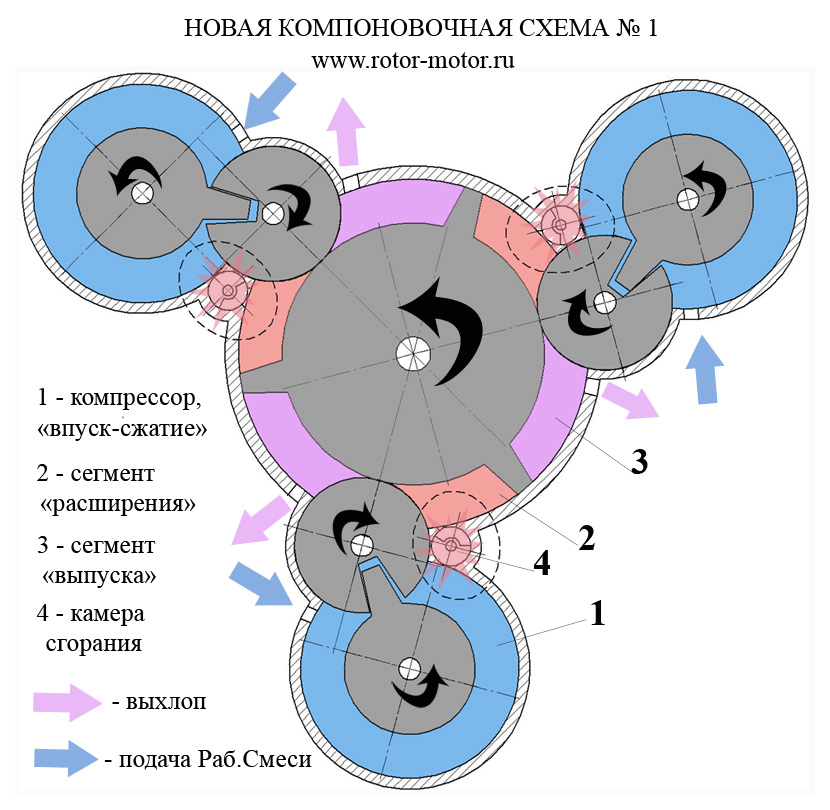
Это отличный помощник в поиске и устранении неисправностей, так как он просто показывает
эффект, который открытие или закрытие различных контактов оказывает на другие устройства в
схема. Все переключатели и релейные контакты классифицируются как нормально
открытый (NO) или нормально закрытый (NC). Позиции, изображенные на диаграммах,
электрические характеристики каждого устройства, как было бы найдено, когда оно
куплен и не подключен ни к одной цепи. Это иногда называют
как «готовое» или обесточенное состояние. Это важно
чтобы понять это, потому что это может также представлять обесточенное положение
в цепи. Обесточенное положение относится к положению компонента
когда цепь обесточена или в цепи отсутствует питание.
Эта точка отсчета часто используется в качестве отправной точки в анализе.
работы цепи.
ФГР. 5 Идентификация катушек и связанных с ними контактов.
Общий метод, используемый для идентификации катушки реле и задействованных контактов.
это поместить букву или буквы в круг, который представляет
катушка (ФГР. 5). Каждый контакт, управляемый этой катушкой, будет иметь
буква катушки или буквы, написанные рядом с символом контакта.
Иногда при наличии нескольких контактов, управляемых одной катушкой, номер
добавляется к письму для указания контактного телефона. Хотя там
являются стандартными значениями этих букв, большинство диаграмм содержат список ключей
показать, что означают буквы; обычно они взяты из названия
устройства.
Нагрузка – элемент цепи, имеющий сопротивление и потребляющий электрическую энергию.
питание подается с L1 на L2. Катушки управления, соленоиды, звуковые сигналы и пилот
огни являются примерами нагрузок. Должно быть включено хотя бы одно загрузочное устройство
на каждой ступени лестничной диаграммы. Без нагрузочного устройства управление
устройства будут переключать разомкнутую цепь на короткое замыкание между
Л1 и Л2. Контакты от управляющих устройств, таких как переключатели, кнопки,
Контакты от управляющих устройств, таких как переключатели, кнопки,
и реле считаются не имеющими сопротивления в замкнутом состоянии. Связь
контактов параллельно с нагрузкой также может привести к короткому замыканию
когда контакт замыкается. Ток в цепи пойдет по пути наименьшего
сопротивления через замкнутый контакт, закорачивая нагрузку под напряжением.
Обычно нагрузки размещаются в правой части лестничной диаграммы рядом с
к L2 и контакты с левой стороны рядом с L1. Одно исключение из этого
правилом является размещение нормально замкнутых контактов, контролируемых
устройство защиты двигателя от перегрузки. Эти контакты нарисованы справа
сторону катушки стартера двигателя, как показано на FGR. 6. При двух и более нагрузках
должны быть под напряжением одновременно, они должны быть подключены в
параллельно. Это гарантирует, что полное линейное напряжение от L1 и L2 будет
появляются при каждой загрузке. Если нагрузки соединены последовательно,
Если нагрузки соединены последовательно,
получит все сетевое напряжение, необходимое для правильной работы. Отзывать
что при последовательном соединении нагрузок приложенное напряжение делится между
каждой из нагрузок. При параллельном соединении нагрузок напряжение на
каждая нагрузка одинакова и равна по величине приложенному напряжению.
Устройства управления, такие как переключатели, кнопки, концевые выключатели и датчики давления
переключатели управляют нагрузкой. Устройства, запускающие нагрузку, обычно подключаются
параллельно, а устройства, останавливающие нагрузку, подключаются последовательно. За
например, несколько кнопок запуска, управляющих одним и тем же пускателем двигателя
катушка будет подключена параллельно, а несколько кнопок остановки
будут соединены последовательно (FGR. 7). Все устройства управления идентифицированы
с соответствующей номенклатурой для устройства (например, стоп, старт).
Точно так же все нагрузки должны иметь сокращения, указывающие на
тип нагрузки (например, M для катушки стартера). Часто дополнительный номер
суффикс используется для различения нескольких устройств одного типа. За
Например, схема управления с двумя пускателями двигателей может идентифицировать
катушки как М1 (контакты 1-М1, 2-М1 и т.д.) так и М2 (контакты 1-М2, 2-М2 и т.д.).
ФГР. 6 Нагрузки размещены справа, а контакты слева.
ФГР. 7 Остановочные устройства подключаются последовательно, а пусковые устройства подключаются параллельно.
ФГР. 8. Лестничная диаграмма с подробными номерами ступеней.
По мере увеличения сложности схемы управления ее лестничная диаграмма
увеличивается в размере, что затрудняет чтение и поиск контактов.
какой катушкой управляются. «Нумерация звеньев» используется для облегчения
в чтении и понимании больших лестничных диаграмм. Каждая ступенька
лестничная диаграмма отмечена (ступени 1, 2, 3 и т. д.), начиная с верхней ступени
д.), начиная с верхней ступени
и чтение вниз. Цепь может быть определена как полный путь от L1 до
L2, содержащий нагрузку. ФГР. 8 иллюстрирует маркировку каждой ступени в
линейная диаграмма с тремя отдельными звеньями:
• Путь для ступени 1 завершен с помощью кнопки реверса, цикл
кнопка запуска, концевой выключатель 1LS и катушка 1CR.
• Путь для ступени 2 завершается через кнопку реверса, реле
контакт 1CR-1, концевой выключатель 1LS и катушка 1CR. Обратите внимание, что ступень 1 и ступень
2 идентифицируются как две отдельные ступени, даже если они управляют одним и тем же
нагрузка. Причина этого в том, что либо кнопка запуска цикла, либо
контакт реле 1CR-1 завершает путь от L1 до L2.
• Путь для ступени 3 завершается через релейный контакт 1CR-2 к и
соленоид SOL A.
«Числовые перекрестные ссылки» используется в сочетании с
нумерация ступеней для размещения вспомогательных контактов, управляемых катушками в
цепь управления. Иногда вспомогательные контакты не находятся в непосредственной близости
Иногда вспомогательные контакты не находятся в непосредственной близости
на лестничной диаграмме к катушке, управляющей их работой. Чтобы найти
эти контакты, номера звеньев указаны справа от L2 в круглых скобках
на звене катушки, управляющей их работой.
В примере, показанном в FGR. 9:
• Контакты катушки 1CR расположены в двух разных местах на линии.
диаграмма.
• Цифры в скобках справа от линейной диаграммы обозначают
расположение линии и тип контактов, управляемых катушкой.
• Цифры в скобках для нормально разомкнутых контактов
без специальной маркировки.
• Номера, используемые для нормально замкнутых контактов, обозначаются подчеркиванием
или завышение числа, чтобы отличить их от нормально разомкнутых контактов.
• В этой схеме катушка реле управления 1CR управляет двумя наборами контактов:
1КР-1 и 1КР-2. Это показано числовым кодом 2, 3.
Требуется некоторый тип «идентификации провода», чтобы правильно
соедините проводники цепи управления с их компонентами в цепи.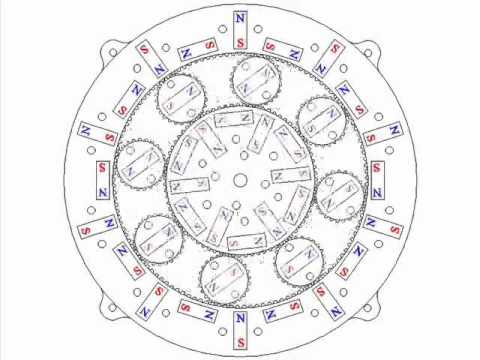
Метод, используемый для идентификации проводов, различается у каждого производителя.
ФГР. 10 показан один из способов, в котором каждая общая точка схемы
присвоен регистрационный номер:
• Нумерация начинается со всех проводов, подключенных к стороне L1
блок питания обозначен номером 1.
• Продолжая цепочку 1 в левом верхнем углу схемы, новый номер
обозначается последовательно для каждого провода, пересекающего компонент.
• Провода, которые электрически общие, маркируются одинаковыми номерами.
• Как только первый провод, непосредственно подключенный к L2, был обозначен (в
в этом случае 5), все остальные провода, напрямую подключенные к L2, будут помечены
с тем же номером.
• Количество компонентов в первой строке лестничной диаграммы определяет
номер провода для проводников, непосредственно подключенных к L2.
ФГР. 9 Числовая система перекрестных ссылок.
ФГР. 10 Нумерация проводов.
ФГР. 11 Идентификация альтернативной проводки с документацией.
ФГР. 12 Представление механических функций.
ФГР. 13 Заземление управляющего трансформатора: (a) управляющий трансформатор
должным образом заземлен на стороне L2 цепи; (б) управляющий трансформатор
неправильное заземление на стороне L1 цепи.
ФГР. 11 иллюстрирует альтернативный способ назначения номеров проводов.
При использовании этого метода все провода, непосредственно подключенные к L1, обозначаются как 1, а
все подключенные к L2 обозначаются 2. Ведь все провода с 1
и 2 отмечены, остальные номера присваиваются в последовательном порядке
начиная с верхнего левого угла диаграммы.
Преимущество этого метода заключается в том, что все провода напрямую
до L2 всегда обозначаются как 2. Лестничные диаграммы также могут содержать серию
описаний, расположенных справа от L2, которые используются для документирования
функция схемы, управляемая устройством вывода.
Пунктирная линия обычно указывает на механическое соединение. Не делают
ошибка чтения ломаной линии как части электрической цепи.
В ФГР. 12 вертикальные прерывистые линии на кнопках прямого и обратного хода
указывают, что их нормально замкнутый и нормально разомкнутый контакты механически
связано. Таким образом, нажатие на кнопку откроет один набор контактов
и закрыть другой. Пунктирная линия между катушками F и R указывает
что они механически сблокированы. Следовательно, катушки F и R не могут
замкнуть контакты одновременно из-за механического блокирующего действия
устройства.
Когда требуется, чтобы управляющий трансформатор имел одну из вторичных линий
заземление, заземление должно быть выполнено таким образом, чтобы случайное заземление
в цепи управления не заведется двигатель или не сработает кнопка остановки
или управление не работает. ФГР. 13а показан вторичный элемент управления
трансформатор должным образом заземлен на стороне L2 цепи.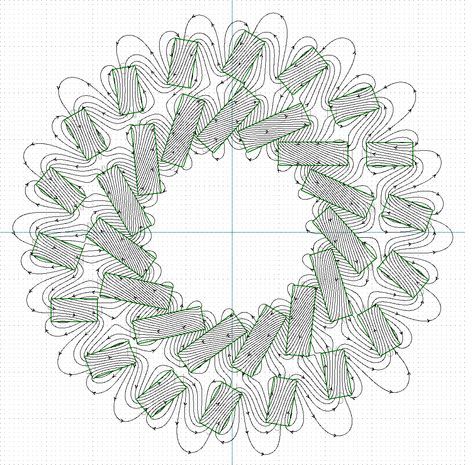 Когда
Когда
цепь исправна, вся цепь слева от катушки М является
незаземленная цепь (это «горячая» ветвь). Путь неисправности к земле
в незаземленной цепи создаст условия короткого замыкания, вызывающие
предохранитель управляющего трансформатора размыкается. ФГР. 13б показана та же схема
неправильное заземление на L1. В этом случае короткое замыкание на землю на
слева от катушки M подаст питание на катушку, неожиданно запустив двигатель.
Предохранитель не сработает, чтобы разомкнуть цепь и нажать на стоп, но
ton не обесточит катушку М. Повреждение оборудования и травмы персонала
было бы очень вероятно. Очевидно, что выходные устройства должны быть подключены напрямую.
к заземленной стороне цепи.
ЧАСТЬ 1 ТЕСТ
1. Дайте определение термину «цепь управления двигателем».
2. Почему для обозначения компонентов на электрических схемах используются символы?
3.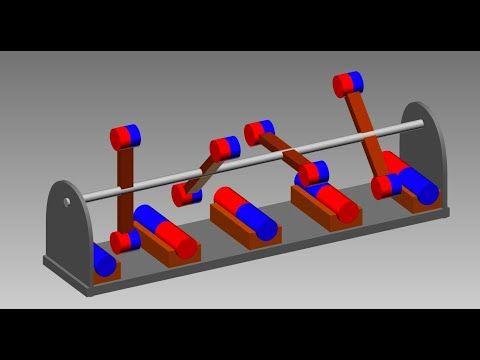 Электрическая цепь содержит три контрольных лампы. Что приемлемо
Электрическая цепь содержит три контрольных лампы. Что приемлемо
символ может использоваться для обозначения каждого огня?
4. Опишите базовую структуру электрической лестничной схемы.
5. Линии используются для представления электрических проводов на схемах.
а. Чем провода, по которым течет большой ток, отличаются от проводов, по которым течет ток?
нести слабый ток?
б. Как различаются провода, которые пересекаются, но не соединяются электрически?
от тех, что подключаются электрически?
6. Контакты кнопочного выключателя размыкаются при нажатии кнопки.
К какому типу кнопок можно отнести эту кнопку? Почему?
7. Катушка реле с маркировкой TR содержит три контакта.
Какое приемлемое кодирование можно использовать для идентификации каждого из контактов?
8. Ступенька на лестничной диаграмме требует наличия двух нагрузок, каждая из которых рассчитана на
полное линейное напряжение, под напряжением, когда выключатель замкнут. Какая связь
Какая связь
нагрузки должны быть использованы? Почему?
9. Одним из требований для конкретного применения двигателя является шесть
переключатели должны быть замкнуты до того, как двигатель будет запущен. Какие связи
коммутаторов следует использовать?
10. Идентификационные этикетки проводов на нескольких проводах электрической
панели проверяются и обнаруживаются одинаковые номера. Что это значит?
11. Ломаная линия, представляющая механическую функцию на электрической
схема ошибочно принята за проводник и подключена как таковая. Какие два типа
к каким проблемам это может привести?
ЧАСТЬ 2. Схемы электрических соединений – однолинейные – блок-схемы
Схемы подключения
ФГР. 14 Типовая электрическая схема пускателя двигателя.
Этот материал и связанные с ним авторские права являются собственностью и используются
с разрешения Schneider Electric.
Схемы подключения
используются для отображения двухточечной проводки между компонентами.
электрической системы, а иногда и их физическое отношение друг к другу.
Они могут включать идентификационные номера проводов, присвоенные проводникам в
лестничная диаграмма и/или цветовое кодирование. Катушки, контакты, двигатели и
как показано в фактическом положении, которое было бы найдено на установке.
Эти схемы полезны при подключении систем, поскольку соединения могут
сделать точно так, как показано на схеме. Схема подключения дает
необходимую информацию для фактического подключения устройства или группы
устройств или для физического отслеживания проводов при устранении неполадок. Однако,
по такому рисунку трудно определить работу схемы.
ФГР. 15 Прокладка проводов в кабелях и кабелепроводах.
ФГР. 16 Электропроводка с внутренними соединениями магнитного пускателя
опущено.
Схемы подключения предоставляются для большинства электрических устройств. ФГР. 14 иллюстрирует
приведена типовая схема подключения пускателя двигателя. На схеме показано,
как можно точнее фактическое расположение всех составных частей
устройства. Открытые клеммы (отмечены открытым кружком) и стрелки
представляют соединения, сделанные пользователем. Обратите внимание, что жирные линии обозначают
силовая цепь, а более тонкие линии используются для обозначения цепи управления.
Прокладка проводов в кабелях и кабелепроводах, как показано в FGR. 15,
является важной частью электрической схемы. На схеме разводки показано
начало и конец электрических проводов и показывает приблизительную
путь, пройденный любым каналом при переходе от одной точки к другой. Интегрированный
чертежом такого рода является график трубопроводов и кабелей, который
табулирует каждый канал по количеству, размеру, функции и обслуживанию, а также
включает в себя количество и размер проводов, которые должны быть проложены в кабелепроводе.
Схемы подключения показывают детали фактических подключений. Редко они
попытайтесь показать полную информацию о проводке панели управления или оборудования.
схема подключения ФГР. 15, приведенный к более простой форме, показан в FGR.
16 с опущенными внутренними соединениями магнитного пускателя. Провода
заключенные в кабелепровод C1, являются частью силовой цепи и рассчитаны на
Требуемый ток двигателя. Провода, заключенные в кабелепровод C2, являются частью
цепи управления более низким напряжением и размером в соответствии с текущими требованиями
управляющего трансформатора.
ФГР. 17 Комбинация проводки и лестничной схемы.
ФГР. 18 Однолинейная схема моторной установки.
ФГР. 19 Однолинейная схема системы распределения электроэнергии.
Схемы подключения часто используются вместе с лестничными диаграммами для
упростить понимание процесса управления. Примером этого является
Примером этого является
проиллюстрировано в FGR. 17. На схеме подключения показаны как питание, так и управление.
схемы.
Включена отдельная лестничная диаграмма цепи управления, чтобы дать
более четкое представление о его работе. Следуя лестничной схеме
видно, что контрольная лампа подключена так, что она будет гореть всякий раз, когда
стартер находится под напряжением.
Цепь питания опущена для ясности, так как ее можно проследить
легко на электрической схеме (жирные линии).
Однолинейные схемы
В однолинейной (также называемой однолинейной) диаграмме наряду с
одна линия, чтобы показать все основные компоненты электрической цепи. Немного
производители оборудования для управления двигателем используют однолинейный чертеж, например
тот, что показан в FGR. 18, как дорожная карта в изучении двигательного контроля.
установки. Установка сводится к максимально простой форме,
тем не менее, он по-прежнему показывает основные требования и оборудование в цепи.
Энергетические системы представляют собой чрезвычайно сложные электрические сети, которые могут
быть географически распределены на очень больших территориях. По большей части они
тоже трехфазные сети-каждая силовая цепь состоит из трех проводников
и все устройства, такие как генераторы, трансформаторы, выключатели и разъединители
и т.д. установлены во всех трех фазах. Эти системы могут быть настолько сложными, что
полная обычная схема, показывающая все соединения, нецелесообразна.
В этом случае использование однолинейной схемы является кратким способом
передача базового устройства компонента энергосистемы. ФГР.
19показана однолинейная схема малой системы распределения электроэнергии. Эти
типы диаграмм также называются диаграммами «стояка мощности».
Блок-схемы
На блок-схеме представлены основные функциональные части сложной электрической/электронной системы.
системы блоками, а не символами. Отдельные компоненты и провода
Отдельные компоненты и провода
не показаны. Вместо этого каждый блок представляет электрические цепи, которые
выполнять определенные функции в системе. Функции, которые выполняют цепи
записываются в каждом блоке.
Стрелки, соединяющие блоки, указывают общее направление тока
пути.
ФГР. 20 показана блок-схема привода двигателя переменного тока с переменной частотой.
Преобразователь частоты регулирует скорость двигателя переменного тока, изменяя
частота, подаваемая на двигатель. Привод также регулирует мощность
напряжение пропорционально выходной частоте, чтобы обеспечить относительно
постоянное отношение (вольт на герц; В/Гц) напряжения к частоте, как требуется
характеристиками двигателя переменного тока для создания соответствующего крутящего момента.
функции каждого блока резюмируются следующим образом:
• На блок выпрямителя подается трехфазное питание частотой 60 Гц.
• Блок выпрямителя представляет собой цепь, которая преобразует или выпрямляет трехфазную
переменного напряжения в постоянное напряжение.
• Блок инвертора представляет собой схему, которая инвертирует или преобразует вход постоянного тока.
напряжение обратно в напряжение переменного тока.
Инвертор состоит из электронных переключателей, которые переключают напряжение постоянного тока
включение и выключение для получения управляемой выходной мощности переменного тока на желаемой частоте
и напряжение.
ФГР. 20 Блок-схема частотно-регулируемого привода переменного тока.
ЧАСТЬ 2 ТЕСТ
1. Какова основная цель электрической схемы?
2. Кроме цифр, какой еще метод можно использовать для идентификации
провода на схеме?
3. Какую роль может сыграть электрическая схема в поиске неисправности двигателя
цепь управления?
4. Перечислите фрагменты информации, которые с наибольшей вероятностью можно найти в канале.
и график кабелей для установки двигателя.
5.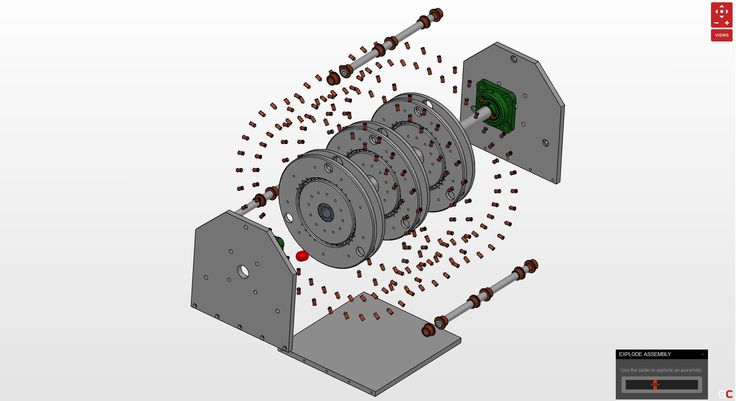 Объясните цель использования электрической схемы двигателя в сочетании с
Объясните цель использования электрической схемы двигателя в сочетании с
с лестничной схемой цепи управления.
6. Каково основное назначение однолинейной схемы?
7. Каково основное назначение блок-схемы?
8. Объясните работу выпрямительного и инверторного блоков преобразователя частоты.
привод переменного тока.
ЧАСТЬ 3 Соединения клемм двигателя
Класс двигателя
Электродвигатели были важным элементом нашей промышленной и
коммерческой экономики более века.
Большинство промышленных машин, используемых сегодня, приводятся в действие электродвигателями.
Промышленность перестала бы функционировать без должным образом спроектированных, установленных,
и обслуживаемые системы управления двигателем. Как правило, двигатели классифицируются
в зависимости от типа используемой мощности (переменный или постоянный ток) и принципа работы двигателя
операции.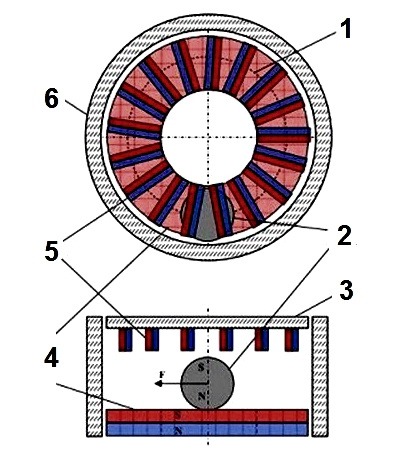 «Генеалогическое древо» моторных типов довольно обширно,
«Генеалогическое древо» моторных типов довольно обширно,
как показано вверху следующей страницы:
В США Институт инженеров по электротехнике и электронике
(IEEE) устанавливает стандарты для испытаний двигателей и методологий испытаний,
пока Национальная ассоциация производителей электротехники (NEMA) готовит
стандарты производительности двигателя и классификации.
Дополнительно двигатели должны быть установлены в соответствии со статьей 430
Национального электротехнического кодекса (NEC).
Соединения двигателя постоянного тока
Промышленные приложения используют двигатели постоянного тока, потому что отношение скорости к крутящему моменту
можно легко варьировать. Двигатели постоянного тока имеют скорость, которой можно управлять
плавно спускается до нуля, сразу же следует ускорение в обратном направлении
направление. В аварийных ситуациях двигатели постоянного тока могут подавать более пяти раз
номинальный крутящий момент без остановки. Динамическое торможение (энергия двигателя постоянного тока
Динамическое торможение (энергия двигателя постоянного тока
подается на резисторную сетку) или рекуперативное торможение (двигатель постоянного тока генерирует
энергия возвращается в источник питания двигателя постоянного тока) может быть получена с двигателями постоянного тока
в приложениях, требующих быстрой остановки, что устраняет необходимость в
или уменьшение размера, механический тормоз.
ФГР. 21 показаны символы, используемые для обозначения основных частей прямого
текущий (постоянный ток) комбинированный двигатель.
ФГР. 21 Детали составного двигателя постоянного тока.
Вращающаяся часть двигателя называется якорем; стационарный
часть двигателя называется статором, который содержит серию
обмотка возбуждения и шунтирующая обмотка возбуждения. В машинах постоянного тока A1 и A2 всегда
обозначают выводы якоря, S1 и S2 обозначают последовательные выводы возбуждения,
а F1 и F2 указывают выводы шунтирующего поля.
Это вид возбуждения поля, обеспечиваемый полем, которое отличает
один тип двигателя постоянного тока от другого; конструкция арматуры имеет
ничего общего с классификацией двигателей. Есть три общих типа
двигателей постоянного тока, классифицируемых по способу возбуждения поля как
следует:
• В шунтирующем двигателе постоянного тока (FGR. 22) используется шунт со сравнительно высоким сопротивлением.
обмотка возбуждения, состоящая из множества витков тонкой проволоки, соединенных параллельно
(шунт) с якорем.
• Серийный двигатель постоянного тока (FGR. 23) использует последовательное поле с очень низким сопротивлением.
обмотка, состоящая из нескольких витков толстой проволоки, соединенных последовательно
с арматурой.
• В составном двигателе постоянного тока (FGR. 24) используется комбинация шунтирующего поля (многие
витков тонкой проволоки) параллельно с якорем и последовательное поле (несколько
витков толстого провода) последовательно с якорем.
ФГР. 22 Стандартные соединения шунтирующего двигателя постоянного тока для вращения против часовой стрелки и
вращение по часовой стрелке.
ФГР. 23 Стандартные соединения двигателей постоянного тока для вращения против часовой стрелки и
вращение по часовой стрелке.
ФГР. 24 стандартных соединения двигателей постоянного тока (кумулятивных) для счетчика
мудрое и вращение по часовой стрелке. Для дифференциального компаундного соединения обратная
С1 и С2.
Все соединения, показанные на рисунках 22, 23 и 24, предназначены для вращения против часовой стрелки.
и вращение по часовой стрелке, обращенное к концу, противоположному приводу (конец коллектора).
Одна из целей нанесения маркировки на клеммы двигателей в соответствии с
к стандарту, чтобы помочь в выполнении соединений, когда предсказуемое вращение
требуется направление. Это может быть в том случае, когда неправильное вращение может
привести к небезопасной работе или повреждению.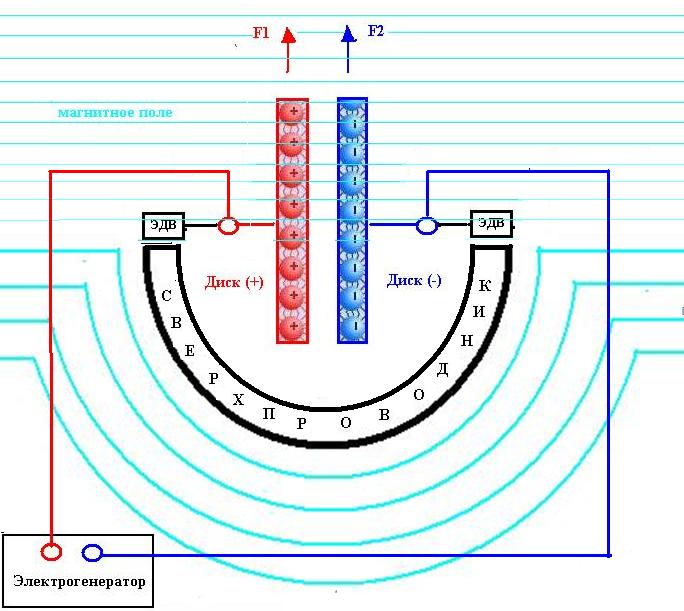 Маркировка клемм обычно используется
Маркировка клемм обычно используется
маркировать только те клеммы, к которым должны быть подключены снаружи
схемы.
Направление вращения двигателя постоянного тока зависит от направления
магнитное поле и направление тока в якоре. Если либо
направление поля или направление тока, протекающего через
якорь реверсируется, вращение двигателя будет реверсивным. Однако,
если оба эти фактора поменять местами одновременно, двигатель
продолжайте вращаться в том же направлении.
Соединения двигателя переменного тока
Асинхронный двигатель переменного тока является доминирующей технологией, используемой сегодня.
что составляет более 90 процентов установленной мощности двигателя. индукция
двигатели доступны в однофазной (1?) и трехфазной (3?) конфигурациях,
величиной от долей лошадиной силы до десятков тысяч
Лошадиные силы. Они могут работать с фиксированными скоростями — чаще всего 900, 1200, 1800,
или 3600 об/мин, или быть оснащенным приводом с регулируемой скоростью.
Наиболее часто используемые двигатели переменного тока на сегодняшний день имеют конфигурацию с короткозамкнутым ротором.
(FGR. 25), названный так из-за алюминиевой или медной беличьей клетки, встроенной в
внутри железных ламинатов ротора. Физического электричества нет.
соединение с беличьей клеткой. Ток в роторе индуцируется
вращающееся магнитное поле статора.
Модели с фазным ротором, в которых витки проволоки вращают обмотки ротора,
так же доступно. Они дорогие, но обеспечивают больший контроль над двигателем.
эксплуатационные характеристики, поэтому чаще всего используются для специальных крутящих моментов
и приложения для ускорения, а также для приложений с регулируемой скоростью.
ФГР. 25 Трехфазный асинхронный двигатель переменного тока с короткозамкнутым ротором.
ФГР. Двухфазный асинхронный двигатель на 26 переменного тока.
ФГР. 27 Соединения статора двухфазного двигателя с двойным напряжением.
СОЕДИНЕНИЯ ОДНОФАЗНОГО ДВИГАТЕЛЯ
Большинство однофазных асинхронных двигателей переменного тока имеют дробную
мощности для источников питания от 120 до 240 В, 60 Гц. Хотя там
есть несколько типов однофазных двигателей, они в основном идентичны
кроме средств запуска. «Двигатель с расщепленной фазой»
наиболее широко используется для средних пусковых установок (FGR. 26). Операция
сплит-мотора резюмируется следующим образом:
• Двигатель имеет пусковую и основную, или рабочую, обмотку, обе из которых находятся под напряжением.
когда двигатель запущен.
• Пусковая обмотка создает разность фаз для запуска двигателя.
и выключается центробежным выключателем по мере приближения к рабочей скорости.
Когда двигатель достигает примерно 75 процентов своей номинальной скорости при полной нагрузке,
пусковая обмотка отключается от цепи.
• Мощность двигателя с расщепленной фазой варьируется примерно до ½ л. с. Популярные приложения
с. Популярные приложения
включают вентиляторы, воздуходувки, бытовую технику, такую как стиральные и сушильные машины, и
инструменты, такие как небольшие пилы или сверлильные станки, где нагрузка применяется после
двигатель набрал свою рабочую скорость.
• Двигатель можно реверсировать, поменяв местами выводы пусковой обмотки.
или основную обмотку, но не обе. Обычно отраслевым стандартом является
поменять местами выводы пусковой обмотки
В двухфазном двухфазном двигателе (FGR. 27) рабочая обмотка
разделен на две секции и может быть подключен для работы от 120-вольтовой
или источник 240 В. Две рабочие обмотки соединены последовательно при работе
от источника 240 В и параллельно для работы на 120 В.
Пусковая обмотка подключается поперек питающих линий на низкое напряжение
и на одной линии до средней точки пусковых обмоток для высокого напряжения.
Это гарантирует, что все обмотки получат напряжение 120 В, на которое они рассчитаны.
работать в. Чтобы изменить направление вращения двойного разделения напряжения
фазный двигатель, поменяйте местами два провода пусковой обмотки.
Двигатели с двойным напряжением подключаются для требуемого напряжения следующим образом.
схема подключения на заводской табличке.
Номинальное номинальное напряжение двухфазного двигателя 120/240 В. С
любого типа двигателя с двойным напряжением, более высокое напряжение предпочтительно, когда
возможен выбор напряжения. Двигатель потребляет столько же
мощности и производит такое же количество лошадиных сил при работе от
питание 120 В или 240 В. Однако при увеличении напряжения в два раза по сравнению со 120 В
до 240 В ток уменьшается вдвое. Эксплуатация двигателя на этом пониженном
уровень тока позволяет использовать меньшие проводники цепи и снижает
потери мощности в линии.
ФГР. 28 Двигатель с постоянно разделенным конденсатором.
Многие однофазные двигатели используют конденсатор последовательно с одним из статоров.
обмотки для оптимизации разности фаз между пусковой и рабочей обмотками
для запуска. Результатом является более высокий пусковой момент, чем у двухфазного двигателя.
Мотор может произвести. Существует три типа конденсаторных двигателей: конденсаторный
пуск, при котором фаза конденсатора находится в цепи только во время пуска;
постоянно разделенный конденсатор, в котором фазы конденсатора в цепи
как для запуска, так и для работы; и двухконденсатор , в котором есть
разные значения емкости для запуска и работы. постоянный раскол
конденсаторный двигатель, показанный на FGR. 28, постоянно использует конденсатор
включен последовательно с одной из обмоток статора. Эта конструкция ниже
по стоимости, чем двигатели с конденсаторным пуском, которые включают конденсаторное переключение
системы. Установки включают компрессоры, насосы, станки, воздушные
кондиционеры, конвейеры, воздуходувки, вентиляторы и другие устройства, которые трудно запустить.
СОЕДИНЕНИЯ ТРЕХФАЗНОГО ДВИГАТЕЛЯ
Трехфазный асинхронный двигатель переменного тока является наиболее распространенным двигателем, используемым в коммерческих целях.
и промышленного применения.
Однофазные двигатели большей мощности обычно не используются, поскольку они
малоэффективны по сравнению с трехфазными двигателями. Кроме того, однофазный
двигатели не запускаются самостоятельно от своих рабочих обмоток, как трехфазные
моторы.
Двигатели переменного тока большой мощности обычно трехфазные.
Все трехфазные двигатели имеют внутреннюю конструкцию с рядом индивидуальных
намотанные катушки. Независимо от того, сколько имеется отдельных катушек, отдельные
катушки всегда будут соединены вместе (последовательно или параллельно) для получения трех
отдельные обмотки, которые называются фазой A, фазой B и фазой
C. Все трехфазные двигатели подключены так, что фазы соединены
либо звездой (Y), либо треугольником (?), как показано на FGR.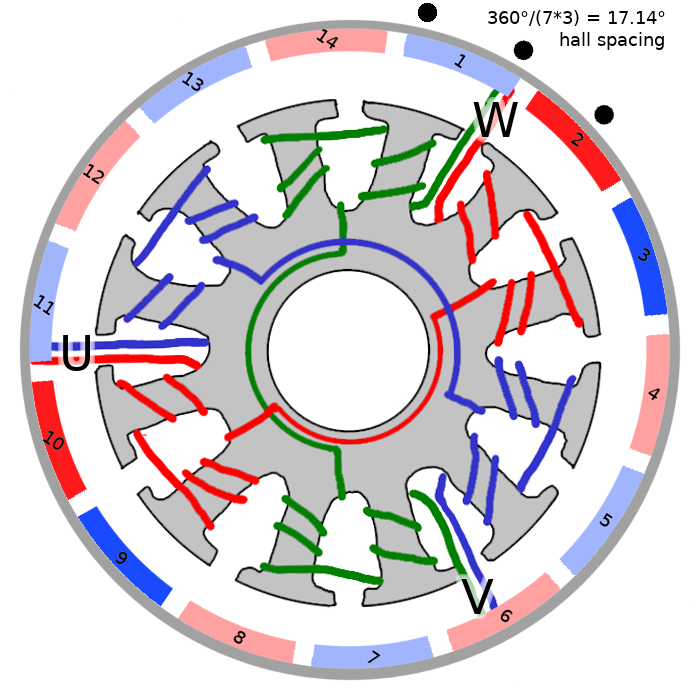 29.
29.
СОЕДИНЕНИЯ ДВИГАТЕЛЯ НА ДВУХ НАПРЯЖЕНИЯХ
ФГР. 29 Трехфазное подключение двигателя по схеме «звезда» и «треугольник».
Обычной практикой является производство трехфазных двигателей, которые можно подключать
работать при разных уровнях напряжения.
Наиболее распространенное номинальное напряжение для трехфазных двигателей — 208/230/460.
V. Всегда проверяйте технические характеристики двигателя или паспортную табличку на соответствие напряжению.
номинальные характеристики и схема подключения для способа подключения к источнику напряжения.
ФГР. 30 иллюстрирует типичную идентификацию терминала и подключение
таблица для девятивыводного трехфазного двигателя с двойным напряжением, соединенным звездой. Один
конец каждой фазы внутренне постоянно соединен с другими фазами.
Каждая фазная катушка (А, В, С) разделена на две равные части и соединена
либо последовательно для работы с высоким напряжением, либо параллельно для работы с низким напряжением
операция. Согласно номенклатуре NEMA, эти выводы имеют маркировку от T1 до
Согласно номенклатуре NEMA, эти выводы имеют маркировку от T1 до
Т9. Соединения высокого и низкого напряжения приведены в сопроводительной документации.
таблица подключения и клеммная колодка двигателя. Тот же принцип серии
применяется параллельное (высоковольтное) и параллельное (низковольтное) соединение катушек.
для трехфазных двигателей двойного напряжения, соединенных звездой-треугольником. Во всех случаях
обратитесь к электрической схеме, прилагаемой к двигателю, чтобы обеспечить правильное подключение
для желаемого уровня напряжения.
Прод. к части 2 >>
автономных копий викторин по главе – базовое управление двигателем
Вопросы
Используя приведенную выше диаграмму, ответьте на вопросы с 1 по 5:
- Какой буквой обозначен компонент, который обычно обеспечивает защиту от перегрузки по току для ответвленной цепи двигателя?
- Какой буквой обозначен компонент, который обычно обеспечивает защиту от перегрузки для ответвленной цепи двигателя?
- При подаче питания от цепи управления, какая буква обозначает компонент, обеспечивающий нормальный пуск и останов?
- Между какими двумя буквами обычно берется питание цепи управления?
- Какие буквы обозначают устройства, мощность которых должна быть указана в лошадиных силах?
- Термическая перегрузка типа плавления сплава называется:
- Реле с припоем
- Реле приборной панели
- Тепловое реле
- Биметаллическое реле
- Частью ручного пускателя электродвигателя переменного тока, которая определяет ток перегрузки электродвигателя, является:
- Верхний концевой выключатель
- Припой в сборе
- Контакт перегрузки
- Нагревательный элемент
- Если автоматический пуск после сбоя питания представляет угрозу безопасности моторного привода, он должен быть оборудован:
- Расцепитель низкого напряжения
- Мигающий красный свет
- Защита от низкого напряжения
- Предупреждающий знак
- Реле перегрузки, в котором используется полоска из разнородных металлов, называется _______ реле.
- Плавкий сплав
- Термистор
- Стакан для припоя
- Биметаллический
- Ссылаясь на рисунок, предполагая, что предохранитель C перегорел, в какой паре точек будет показано нулевое значение вольт, если к ним подключить вольтметр?
- Для подключения двигателя исключительно для работы в толчковом режиме схема управления будет:
- Используйте удерживающие контакты
- Соединить удерживающие контакты последовательно с кнопкой пуска
- Подключить удерживающие контакты параллельно кнопке пуска
- Не использовать удерживающие контакты
- Реле времени – лучший способ обеспечить глушение двигателя. Правда или ложь?
- Электрические блокировки в реверсивном магнитном пускателе:
- Управляется реле времени, необходимым для работы схемы
- Параллельно с кнопками прямого и обратного хода
- Нормально замкнутые контакты
- Нормально разомкнутые контакты
- Защита двигателей от перегрузки достигается подключением:
- Термочувствительные элементы последовательно с двигателем
- Реле сброса последовательно с двигателем
- Патронные предохранители последовательно с двигателем
- Набор размыкающих контактов последовательно с двигателем
- С трехпроводной схемой управления, когда питание восстанавливается после ситуации с низким напряжением:
- Оператор должен перезапустить двигатель
- Двигатель будет многофазным
- Двигатель автоматически перезапустится
- Двигатель автоматически перезапустится после временной задержки
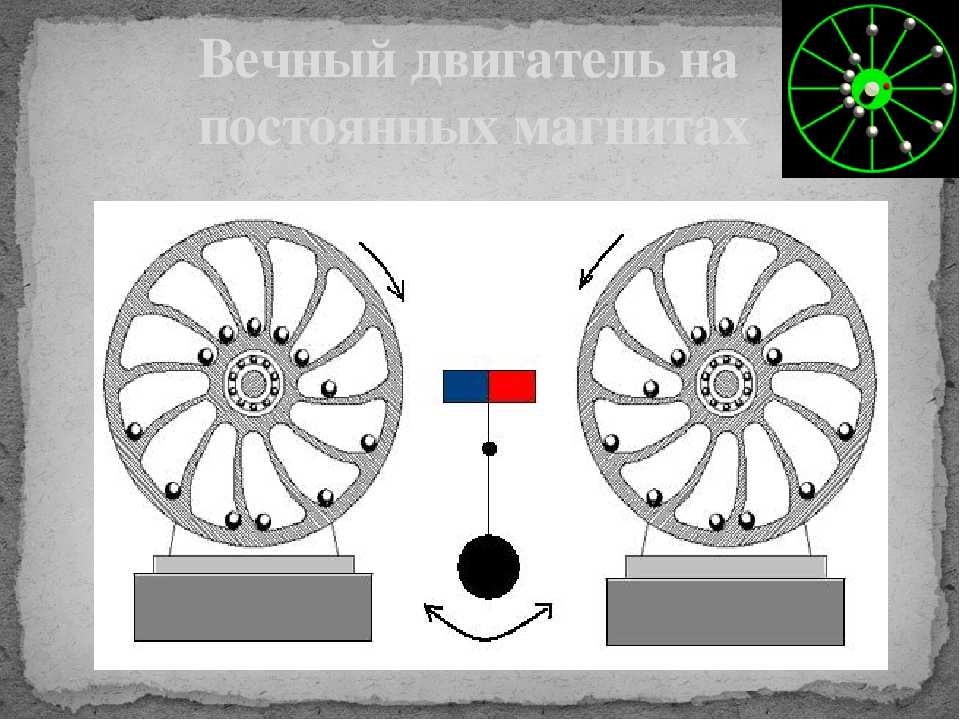
Ответы
- Б
- Д
- С
- В и С
- А и С
- А
- Д
- С
- А
- 3 и 6
- Д
- Ложь
- С
- А
- А
Вопросы
- В схеме управления двигателем с несколькими станциями кнопок пуска/пуска кнопки останова будут подключены к ______, а кнопки пуска будут подключены к _______.
- Для устранения неполадок в электрической цепи управления лучше всего использовать следующий чертеж:
- Схема
- Проводка
- Иллюстрированный
- Подставка
- Ниже показана кнопка с двойным контактом. При подключении в качестве пусковой кнопки в цепи управления магнитного пускателя какая пара клемм обычно используется?
- Реле времени – лучший способ обеспечить глушение двигателя. Правда или ложь?
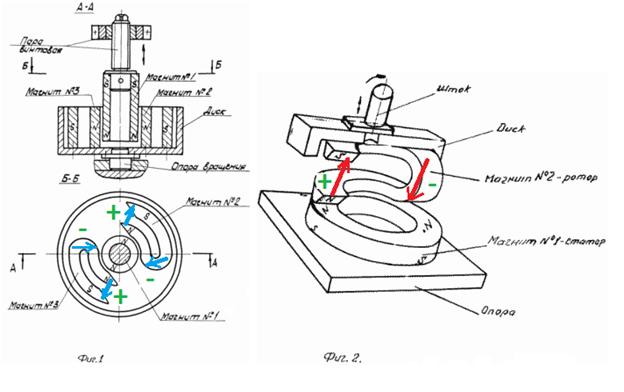
Ответы
- Серия, параллельная
- А
- 3 и 4
- Ложь
Вопросы
- Минимальное количество проводников цепи управления к кнопочной станции остановки/вперед/назад, которая обеспечивает защиту от низкого напряжения для трехфазного реверсивного двигателя:
- 2 провода
- 3 провода
- 4 провода
- 6 проводов
- Какой из следующих типов пускателей обычно не обеспечивает защиту двигателя?
- Магнитный пускатель
- Кнопочный пускатель
- Тумблерный пускатель
- Контроллер барабанного переключателя
- Если схема на чертеже работала нормально и произошла перегрузка, то:
- Загорались бы оба индикатора
- Загорится зеленый свет, а красный погаснет
- Обе лампочки погаснут
- Загорался красный свет, а зеленый гас
- С трехпроводной схемой управления, когда питание восстанавливается после ситуации с низким напряжением:
- Двигатель автоматически перезапустится после временной задержки
- Двигатель автоматически перезапустится
- Оператор должен перезапустить двигатель
- Двигатель будет многофазным
- Тепловая перегрузка типа плавления сплава называется:
- Реле с припоем
- Тепловое реле
- Биметаллическое реле
- Реле приборной панели
- Стартер мощностью 10 л. с., 600 В, если он используется с двигателем на 120 В, скорее всего, будет рассчитан на:
- 2 л.с.
- 3 л.с.
- 10 л.с.
- 2,5 л.с.
- Размыкающий контакт будет разомкнут сразу после обесточивания катушки. Правда или ложь?
- Реле перегрузки, в котором используется полоска из разнородных металлов, называется _______ реле.
- Термистор
- Плавкий сплав
- Стакан для припоя
- Биметаллический
- Для катушки постоянного напряжения не требуется экранирующая катушка. Правда или ложь?
- Защита двигателей от перегрузки достигается подключением:
- Набор размыкающих контактов последовательно с двигателем
- Термочувствительные элементы последовательно с двигателем
- Патронные предохранители последовательно с двигателем
- Реле сброса последовательно с двигателем
- Частью ручного пускателя электродвигателя переменного тока, которая определяет ток перегрузки электродвигателя, является:
- Контакт перегрузки
- Припой в сборе
- Нагревательный элемент
- Верхний концевой выключатель
- Существенное различие между магнитным пускателем двигателя и магнитным контактором заключается в том, что контактор не содержит:
- Затеняющие катушки
- Удерживающие контакты
- Релейная защита от перегрузки
- Контакты, рассчитанные на мощность
- Вращение трехфазного асинхронного двигателя переменного тока можно изменить, поменяв местами:
- Цепь управления
- Блокировка прямого/обратного хода
- Катушки переднего и заднего хода
- Любые две линии электропередач
- Если магнитный контактор переменного тока с катушкой 480В был запитан 120В, то скорее всего:
- Реле перегрузки сработает
- Контактор не срабатывает
- Перегорают предохранители цепи управления
- Катушка перегревалась бы при нормальной работе
- На схеме управления пунктирная линия между двумя катушками обычно означает, что эти две катушки:
- Работают вместе
- Механически сблокированы
- Имеют электрическую блокировку
- Иметь общий набор контактов
- При нормальной работе из корпуса магнитного пускателя переменного тока слышен громкий стук. Какова наиболее вероятная причина?
- Сломанная затеняющая катушка
- Обрыв в цепи пломбирования
- Ржавчина на торцах опор
- Силовой контакт не имеет хорошего контакта из-за плохого давления
- Назначение электрической блокировки в трехфазном реверсивном магнитном пускателе двигателя переменного тока:
- Убедитесь, что сначала выбрано прямое направление вращения
- Разрешить одновременное питание обеих катушек
- Предотвращение одновременного включения обеих катушек
- Сохранить цепь катушки после отпускания кнопки останова
- Ниже показана кнопка с двойным контактом. При подключении в качестве пусковой кнопки в цепи управления магнитного пускателя какая пара клемм обычно используется?
- Реле с выдержкой времени включает в себя контакты как с выдержкой времени, так и с контактами мгновенного действия. Правда или ложь?
- Вставьте пропущенные слова. Электрические блокировки реверсивного пускателя обычно представляют собой _______ контакты
- НО контакт будет замкнут, пока катушка реле находится под напряжением. Правда или ложь?
- Обозначение N.C.T.O относится к таймеру задержки выключения. Правда или ложь?
- Электрические блокировки в реверсивном магнитном пускателе:
- Нормально замкнутые контакты
- Нормально разомкнутые контакты
- Параллельно с кнопками прямого и обратного хода
- Управляется реле времени, необходимым для работы схемы
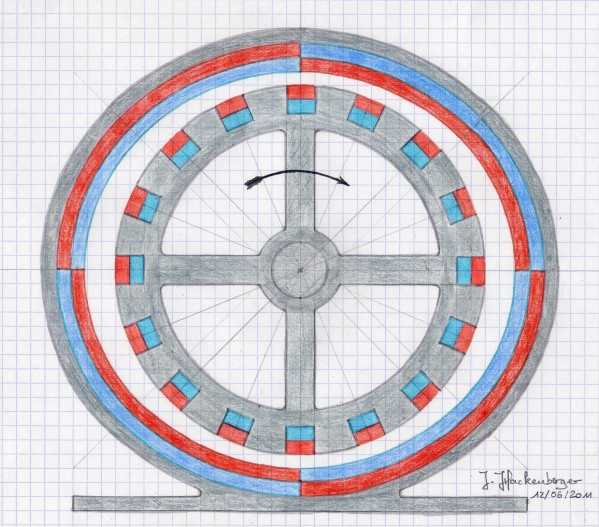 с., 600 В, если он используется с двигателем на 120 В, скорее всего, будет рассчитан на:
с., 600 В, если он используется с двигателем на 120 В, скорее всего, будет рассчитан на: Какова наиболее вероятная причина?
Какова наиболее вероятная причина?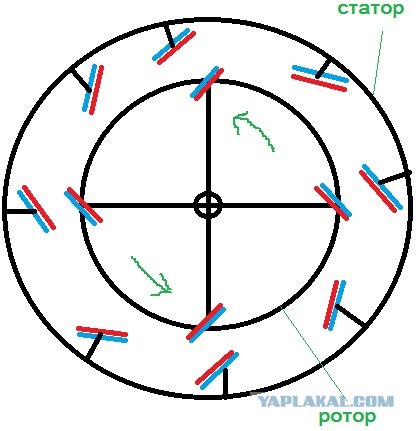 Электрические блокировки реверсивного пускателя обычно представляют собой _______ контакты
Электрические блокировки реверсивного пускателя обычно представляют собой _______ контакты.
Ответы
- Д
- С
- Д
- С
- А
- А
- Ложь
- Д
- Правда
- Б
- С
- С
- Д
- Б
- Б
- А
- С
- 3 и 4
- Правда
- закрыто
- Правда
- Ложь
- А
Вопросы
Используя приведенную выше диаграмму, ответьте на вопросы с 1 по 5:
- Какой буквой обозначен компонент, который обычно обеспечивает защиту от перегрузки по току для ответвленной цепи двигателя?
- Какой буквой обозначен компонент, который обычно обеспечивает защиту от перегрузки для ответвленной цепи двигателя?
- При подаче питания от цепи управления, какая буква обозначает компонент, обеспечивающий нормальный пуск и останов?
- Между какими двумя буквами обычно берется питание цепи управления?
- Какие буквы обозначают устройства, мощность которых должна быть указана в лошадиных силах?
- В цепи управления двигателем с несколькими станциями кнопок пуска/пуска кнопки останова будут подключены к ______, а кнопки пуска будут подключены к _______.
- Для устранения неполадок в электрической цепи управления лучше всего использовать следующий чертеж:
- Схема
- Иллюстрированный
- Проводка
- Подставка
- Чертеж, показывающий взаимное расположение различных компонентов, представляет собой:
- Схема подключения
- Принципиальная схема
- Элементарная схема
- Лестничная схема
- Ссылаясь на следующий рисунок, какое количество проводов требуется там, где это указано?
Ответы
- Б
- Д
- С
- В и С
- А и С
- , параллельная
- А
- А
- 3
Серия
Вопросы
Используя следующую диаграмму, ответьте на вопросы с 1 по 5:
- Какой буквой обозначен компонент, который обычно обеспечивает защиту от перегрузки по току для ответвленной цепи двигателя?
- Какой буквой обозначен компонент, который обычно обеспечивает защиту от перегрузки для ответвленной цепи двигателя?
- При подаче питания от цепи управления, какая буква обозначает компонент, обеспечивающий нормальный пуск и останов?
- Между какими двумя буквами обычно берется питание цепи управления?
- Какие буквы обозначают устройства, мощность которых должна быть указана в лошадиных силах?
- Минимальное количество проводников цепи управления к кнопочной станции остановки/вперед/назад, которая обеспечивает защиту от низкого напряжения для трехфазного реверсивного двигателя:
- 2 провода
- 3 провода
- 4 провода
- 6 проводов
- Толчковый режим — это еще один термин, используемый для:
- Бег трусцой
- Заглушка
- Маневровый
- Охота
- Вращение трехфазного асинхронного двигателя переменного тока можно изменить, поменяв местами:
- Цепь управления
- Блокировка прямого/обратного хода
- Катушки переднего и заднего хода
- Любые две линии электропередач
- На схеме управления пунктирная линия между двумя катушками обычно означает, что эти две катушки:
- Работают вместе
- Механически сблокированы
- Имеют электрическую блокировку
- Иметь общий набор контактов
- Назначение электрической блокировки в трехфазном реверсивном магнитном пускателе двигателя переменного тока:
- Убедитесь, что сначала выбрано прямое направление вращения
- Разрешить одновременное питание обеих катушек
- Предотвращение одновременного включения обеих катушек
- Поддержание цепи катушки после отпускания кнопки останова
- Для подключения двигателя исключительно для работы в толчковом режиме схема управления будет:
- Используйте удерживающие контакты
- Соединить удерживающие контакты последовательно с кнопкой пуска
- Подключить удерживающие контакты параллельно кнопке пуска
- Не использовать удерживающие контакты
- Что касается чертежа, наилучшей меткой для кнопки с надписью «Z» будет:
- Стоп
- Бег
- Выполнить
- Сброс
- Что касается чертежа, наилучшей меткой для кнопки «Y» будет:
- Стоп
- Бег
- Выполнить
- Сброс
Используйте следующее изображение, чтобы ответить на вопросы 14 и 15.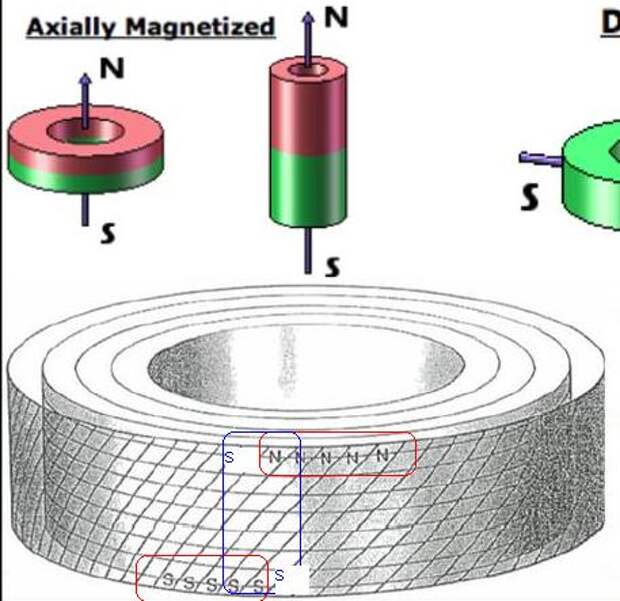
- Какое минимальное количество проводников цепи управления требуется в кабелепроводе А?
- 2 провода
- 3 провода
- 4 провода
- 5 проводов
- Какое минимальное количество проводников цепи управления требуется в кабелепроводе B?
- 2 провода
- 3 провода
- 4 провода
- 5 проводов
- Реле времени — лучший способ обеспечить глушение двигателя. Правда или ложь?
- Реле с выдержкой времени включает в себя контакты как с выдержкой времени, так и с контактами мгновенного действия. Правда или ложь?
- Размыкающий контакт будет разомкнут сразу после обесточивания катушки. Правда или ложь?
- НО контакт будет замкнут, пока катушка реле находится под напряжением. Правда или ложь?
- Обозначение N.C.T.O относится к таймеру задержки выключения. Правда или ложь?
- Электрические блокировки в реверсивном магнитном пускателе:
- Нормально замкнутые контакты
- Нормально разомкнутые контакты
- Параллельно с кнопками прямого и обратного хода
- Управляется реле времени, необходимым для работы схемы
- Защита двигателей от перегрузки достигается подключением:
- Термочувствительные элементы последовательно с двигателем
- Реле сброса последовательно с двигателем
- Патронные предохранители последовательно с двигателем
- Набор размыкающих контактов последовательно с двигателем
- Бег трусцой относится к:
- Двигатель, не способный развивать постоянный крутящий момент
- Многофазный двигатель
- Двигатель, который периодически запускается и останавливается
- Метод, используемый для остановки двигателя для точного позиционирования
Ответы
- Б
- Д
- С
- В и С
- А и С
- С
- А
- Д
- Б
- С
- Д
- Б
- С
- ?
- С
- Ложь
- Правда
- Ложь
- Правда
- Ложь
- А
- А
- Д
- Чертеж, показывающий взаимное расположение различных компонентов, представляет собой:
- Схема подключения
- Принципиальная схема
- Элементарная схема
- Лестничная схема
- Для обеспечения безопасности при обслуживании выключатель двигателя должен быть заблокирован в положении «ВЫКЛ». После окончания ремонтных работ замок снимается:
- Супервайзер
- Менеджер проекта
- Человек, поставивший замок на
- Ведущая рука
- Что касается безопасности работников, «изоляция» означает:
- Переезд в удаленное место
- Отключить от всех источников энергии
- Выключить электрический выключатель
- Ограждение рабочей площадки
- Ссылаясь на рисунок, предполагая, что предохранитель C перегорел, в какой паре точек будет показано нулевое значение вольт, если к ним подключить вольтметр?
- Средства разъединения, которые НЕ предназначены для прерывания протекания тока, это:
- Выключатель двигателя
- Переключатель общего назначения
- Разъединитель
- Автоматический выключатель
- Если схема на чертеже работала нормально и произошла перегрузка, то:
- Загорались бы оба индикатора
- Загорится зеленый свет, а красный погаснет
- Обе лампочки погаснут
- Загорался красный свет, а зеленый гас
- При нормальной работе из корпуса магнитного пускателя переменного тока слышен громкий стук. Какова наиболее вероятная причина?
- Сломанная затеняющая катушка
- Обрыв в цепи пломбирования
- Ржавчина на торцах опор
- Силовой контакт не имеет хорошего контакта из-за плохого давления
- Если схема управления, показанная ниже, отключилась из-за перегрузки, то какое из показанных положений вольтметра будет показывать напряжение в сети?
- ВМ А
- ВМ Б
- ВМ С
- ВМ Д
- Какое минимальное количество проводников цепи управления требуется в кабелепроводе А?
- 2 провода
- 3 провода
- 4 провода
- 5 проводов
- В качестве разъединителя силовой цепи двигателя можно использовать разъединитель. Правда или ложь?
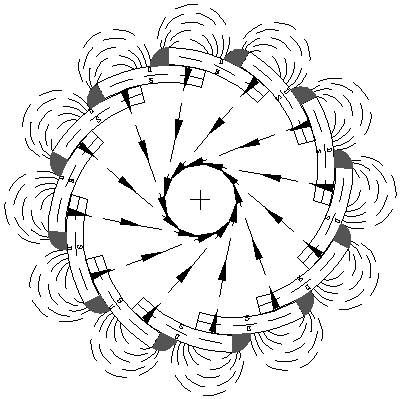 После окончания ремонтных работ замок снимается:
После окончания ремонтных работ замок снимается: Какова наиболее вероятная причина?
Какова наиболее вероятная причина?Используйте следующее изображение, чтобы ответить на вопросы 11 и 12.
- Если пускатель двигателя на чертеже включен и работает нормально, какое напряжение должно быть на нормально разомкнутом контакте (M)?
- Напряжение сети
- Нулевое напряжение
- Половина сетевого напряжения
- Удвоенное линейное напряжение
- Если пускатель двигателя на чертеже включен и работает нормально, каким должно быть напряжение на размыкающем контакте (M)?
- Напряжение сети
- Нулевое напряжение
- Половина сетевого напряжения
- Удвоенное линейное напряжение
Ответы
- А
- С
- Б
- 3 и 6
- С
- Д
- А
- ?
- ?
- Ложь
- Б
- А
Анализ проектов электродвигателей и генераторов с помощью COMSOL®
В этой записи блога мы рассмотрим 12-слотовую 10-полюсную машину с постоянными магнитами (ПМ), смоделированную в программном обеспечении COMSOL Multiphysics® и модуле AC/DC.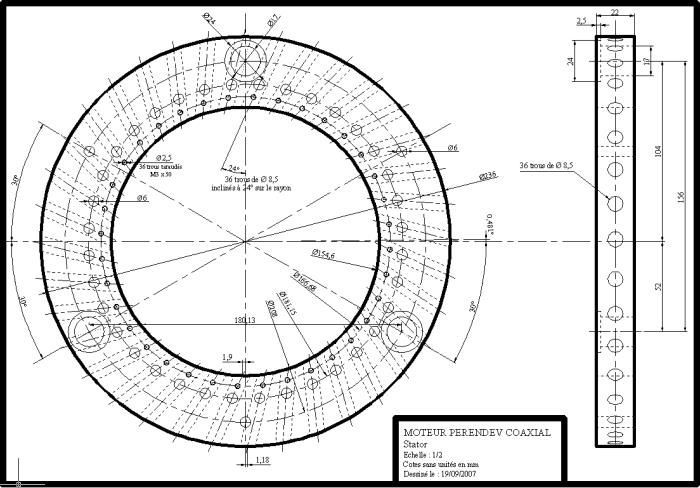 Машина в этом примере служит типичным примером вращающегося устройства и имеет внешний диаметр 35 мм и осевую длину 80 мм. С небольшими изменениями входных условий одна и та же модель может стать двигателем или генератором. В следующих сообщениях блога мы подробно расскажем о каждом из аспектов дизайна, обсуждаемых здесь.
Машина в этом примере служит типичным примером вращающегося устройства и имеет внешний диаметр 35 мм и осевую длину 80 мм. С небольшими изменениями входных условий одна и та же модель может стать двигателем или генератором. В следующих сообщениях блога мы подробно расскажем о каждом из аспектов дизайна, обсуждаемых здесь.
Это первая запись в блоге из серии, посвященной тому, как получить представление о некоторых аспектах проектирования вращающихся машин, используя возможности моделирования и постобработки программного обеспечения COMSOL Multiphysics®. Часть 2 посвящена расчетным потерям, температуре и эффективности электродвигателей.
Конструкции электродвигателей и генераторов: установка модели
В двигателе с постоянными магнитами магнитные поля от ротора вращаются синхронно с магнитными полями, генерируемыми токами статора. Взаимодействие магнитных полей ротора и статора создает чистый крутящий момент, который позволяет двигателю преобразовывать токи обмоток в механическую энергию. Вследствие синхронного характера возбуждения в двигателе с постоянными магнитами на мгновенный крутящий момент сильно влияет угловое положение ротора, поскольку положение синхронизировано с токами статора. Это отличается от асинхронных машин, где обмотки статора индуцируют магнитные поля ротора в зависимости от отставания по скорости между ротором и статором (отсюда его популярное название, 9).{\circ}/N_p}, где N_p — количество полюсов ротора. В знаменателе указан угловой размах одного полюса ротора.
Вследствие синхронного характера возбуждения в двигателе с постоянными магнитами на мгновенный крутящий момент сильно влияет угловое положение ротора, поскольку положение синхронизировано с токами статора. Это отличается от асинхронных машин, где обмотки статора индуцируют магнитные поля ротора в зависимости от отставания по скорости между ротором и статором (отсюда его популярное название, 9).{\circ}/N_p}, где N_p — количество полюсов ротора. В знаменателе указан угловой размах одного полюса ротора.
Исследование и оптимизация распределения магнитного поля
Распределение магнитного поля является очень важным фактором при проектировании электрических машин. В синхронных вращающихся машинах ключевым параметром для исследования наведенных напряжений является пространственное распределение потока воздушного зазора (потока, которым обмениваются ротор и статор). Фазное напряжение статора будет синусоидальным только в том случае, если радиальный магнитный поток имеет синусоидальное распределение по периферии ротора. Эта пространственная форма волны также называется волной магнитодвижущей силы воздушного зазора (MMF). Если волна МДС несинусоидальна, в индуцированное напряжение вводятся высшие гармоники.
Эта пространственная форма волны также называется волной магнитодвижущей силы воздушного зазора (MMF). Если волна МДС несинусоидальна, в индуцированное напряжение вводятся высшие гармоники.
В этой модели для получения волны МДС воздушного зазора мы оцениваем радиальную составляющую плотности магнитного потока вдоль границы сплошности. По мере вращения ротора мы можем наблюдать, как волна МДС эволюционирует во времени. Просто осмотрев, мы можем понять, что индуцированное напряжение не будет идеально синусоидальным. В следующей серии блогов мы объясним, как получить пространственные и временные преобразования Фурье магнитного потока в воздушном зазоре и как связать их со каскадным потоком и гармоническим искажением напряжения.
Слева: изменение плотности магнитного потока при вращении ротора. Справа: развитие волны МДС воздушного зазора при вращении ротора.
Исследование и оптимизация механического крутящего момента
Существует несколько способов возбуждения обмоток статора для конкретной комбинации пазов/полюсов двигателя с постоянными магнитами.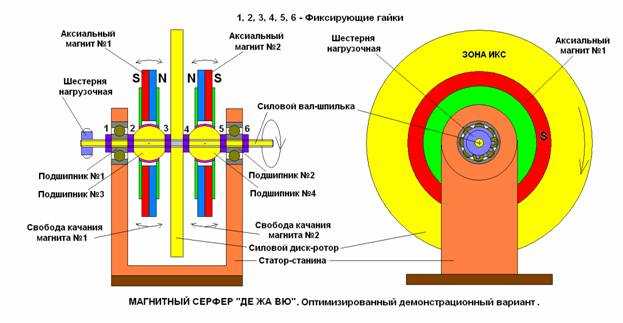 Схема, показанная на схеме модели машины с постоянными магнитами (первый рисунок в сообщении блога), является одним из способов привода 12-слотового 10-полюсного двигателя с постоянными магнитами. Возбуждение катушки статора (или начальное положение ротора) необходимо отрегулировать таким образом, чтобы к ротору прикладывался максимальный крутящий момент. Для этого ротору придается начальное угловое смещение. Угол \alpha ротора варьируется в пределах углового диапазона одного магнита ротора и рассчитывается средний крутящий момент. В качестве начального положения ротора выбирается значение начального углового перемещения, соответствующее максимальному среднему крутящему моменту. Таким образом, становится легче визуализировать, какое относительное положение статора и ротора создает максимальный крутящий момент.
Схема, показанная на схеме модели машины с постоянными магнитами (первый рисунок в сообщении блога), является одним из способов привода 12-слотового 10-полюсного двигателя с постоянными магнитами. Возбуждение катушки статора (или начальное положение ротора) необходимо отрегулировать таким образом, чтобы к ротору прикладывался максимальный крутящий момент. Для этого ротору придается начальное угловое смещение. Угол \alpha ротора варьируется в пределах углового диапазона одного магнита ротора и рассчитывается средний крутящий момент. В качестве начального положения ротора выбирается значение начального углового перемещения, соответствующее максимальному среднему крутящему моменту. Таким образом, становится легче визуализировать, какое относительное положение статора и ротора создает максимальный крутящий момент.
В представленном здесь случае наблюдаются два максимума:
- Положительный максимум, который будет соответствовать вращению в направлении против часовой стрелки — после применения правильной последовательности фаз.
- Отрицательный максимум, который приведет к вращению по часовой стрелке (также здесь, после тонкой настройки последовательности фаз)
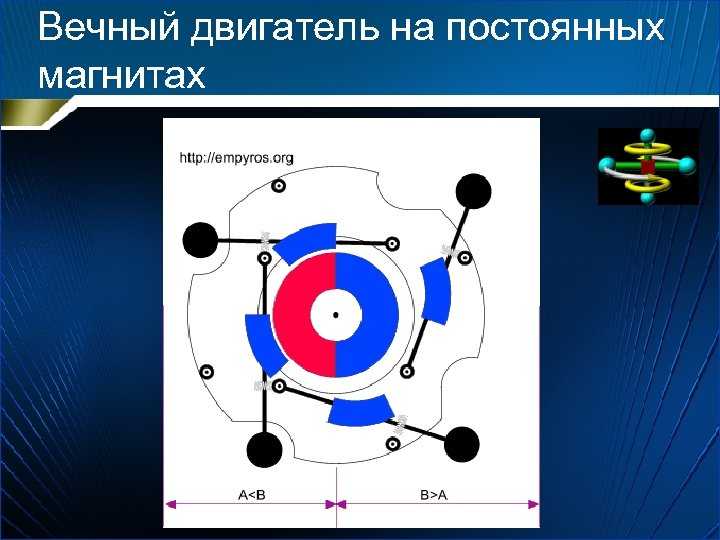
Форма волны крутящего момента ротора, представленная в следующем разделе, соответствует положительному максимуму кривой среднего крутящего момента ротора. Мы более подробно рассмотрим проверку крутящего момента и различные методы расчета крутящего момента, такие как 9{\circ}).
Исследование и оптимизация использования железа и потерь
Используя график плотности магнитного потока, мы можем исследовать распределение плотности потока в железном сердечнике. На некоторых участках геометрии ярмо может образовывать узкое место, что может сместить значение плотности магнитного потока в область насыщения кривой B-H. В других случаях он достаточно широк, чтобы создавать области с низкой напряженностью поля. Когда определенная часть ярма постоянно показывает слабое поле, эта часть недостаточно используется для создания крутящего момента.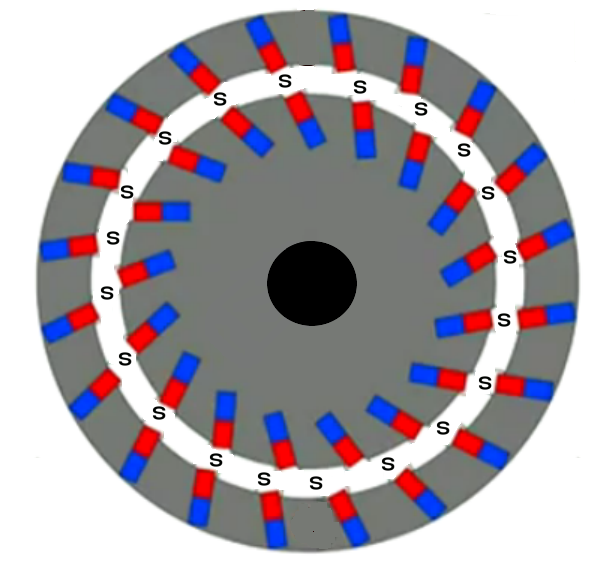 Когда определенная часть образует постоянное узкое место, эту часть, вероятно, следует расширить. 9{\ circ}, полученное из кривой среднего крутящего момента в предыдущем разделе. Как вы можете видеть из графиков и кривой крутящего момента ниже, использование железа оптимально, когда толщина железа составляет около 2 мм: использование менее 2 мм отрицательно скажется на крутящем моменте, а увеличение добавит ненужного материала. — и поэтому; Вес и стоимость — до мотора.
Когда определенная часть образует постоянное узкое место, эту часть, вероятно, следует расширить. 9{\ circ}, полученное из кривой среднего крутящего момента в предыдущем разделе. Как вы можете видеть из графиков и кривой крутящего момента ниже, использование железа оптимально, когда толщина железа составляет около 2 мм: использование менее 2 мм отрицательно скажется на крутящем моменте, а увеличение добавит ненужного материала. — и поэтому; Вес и стоимость — до мотора.
Распределение плотности магнитного потока для различных значений толщины железа. Слева: 1 мм. Центр: 2 мм. Справа: 3 мм.
Изменение формы сигнала крутящего момента ротора в зависимости от толщины стали.
Это еще не все: при определении толщины железа учитываются дополнительные факторы, такие как механическая прочность, резистивные и магнитные потери. При исследовании плотности потока и крутящего момента также можно оценить влияние различной толщины стали на потери в стали. Начиная с COMSOL Multiphysics версии 5.6, имеется встроенный модуль расчета потерь 9.1360 позволяет легко оценить потери в меди и в железе с помощью уравнения Steinmetz , формулы Bertotti или пользовательской модели потерь. В следующих сообщениях блога мы подробнее обсудим мультифизические аспекты моделирования вращающихся машин, такие как расчет эффективности, оценка повышения температуры, анализ вибрации и исследование шума.
Начиная с COMSOL Multiphysics версии 5.6, имеется встроенный модуль расчета потерь 9.1360 позволяет легко оценить потери в меди и в железе с помощью уравнения Steinmetz , формулы Bertotti или пользовательской модели потерь. В следующих сообщениях блога мы подробнее обсудим мультифизические аспекты моделирования вращающихся машин, такие как расчет эффективности, оценка повышения температуры, анализ вибрации и исследование шума.
Распределение потерь в железе для различных значений толщины чугуна. Слева: 1 мм. Центр: 2 мм. Справа: 3 мм.
Резюме
Мы обсудили использование некоторых функций COMSOL Multiphysics и модуля AC/DC, чтобы легко получить представление о некоторых аспектах проектирования вращающихся машин. Мы видели, как линейный график плотности радиального магнитного потока в воздушном зазоре показывает нам, будет ли индуцированное напряжение синусоидальным. С помощью COMSOL Multiphysics параметрический анализ можно использовать для определения начального угла ротора, который будет создавать максимальный крутящий момент ротора. Поверхностный график плотности магнитного потока в машине позволяет визуально определить, является ли использование железа оптимальным для эффективного создания крутящего момента. Влияние толщины стали на потери в стали также можно наблюдать с помощью встроенных моделей потерь, предлагаемых COMSOL Multiphysics.
Поверхностный график плотности магнитного потока в машине позволяет визуально определить, является ли использование железа оптимальным для эффективного создания крутящего момента. Влияние толщины стали на потери в стали также можно наблюдать с помощью встроенных моделей потерь, предлагаемых COMSOL Multiphysics.
В этом первом сообщении в блоге этой серии показано, как можно использовать мощные возможности COMSOL Multiphysics для моделирования и постобработки для получения ценных сведений о конструкции вращающихся машин. В следующих сообщениях блога подробно обсуждаются методы расчета крутящего момента, расчет эффективности, анализ потерь в стали и тепловых характеристик, а также исследование вибрации и шума двигателя. Следите за обновлениями!
Попробуйте сами
Попробуйте смоделировать обсуждаемый здесь электродвигатель, нажав кнопку ниже:
Получить MPH-файл
Схема управления стартером двигателя
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
В электротехнической промышленности установлен универсальный набор символов и правил построения линейных схем (цепей). Применяя эти стандарты, электрик устанавливает рабочую практику на языке, общем для всех электриков.
Одна нагрузка на линию
Не более одной нагрузки должно быть размещено на любой линии цепи между линиями электропередач L1 и L2. Например, сигнальная лампа может быть подключена к цепи с помощью однополюсного выключателя. См. рис. 1. В этой схеме силовые линии нарисованы вертикально по бокам чертежа и отмечены L1 и L2. Пространство между L1 и L2 представляет собой напряжение цепи управления. Это напряжение появляется на контрольной лампе PL1, когда переключатель S1 замкнут. Контрольная лампа светится, когда ток протекает через S1 и PL1, потому что напряжение между L1 и L2 является правильным напряжением для контрольной лампы.
Две нагрузки не должны подключаться последовательно на одной линии линейной схемы. Если две нагрузки соединены последовательно, то напряжение между L1 и L2 должно делиться на обе нагрузки, когда S1 замкнут. В результате ни одно устройство не получает все 120 В, необходимые для правильной работы.
В результате ни одно устройство не получает все 120 В, необходимые для правильной работы.
Нагрузка с наибольшим сопротивлением падает с наибольшим напряжением. Нагрузка с наименьшим сопротивлением падает с наименьшим напряжением.
Рис. 1. В любой цепи между L1 и L2 должно быть размещено не более одной нагрузки.
Нагрузки должны быть подключены параллельно, если на линейной схеме должно быть подключено более одной нагрузки. См. рис. 2. В этой цепи на каждую линию между L1 и L2 приходится только одна нагрузка, хотя в цепи две нагрузки. Напряжение от L1 и L2 появляется на каждой нагрузке для правильной работы контрольной лампы и соленоида. Эта цепь имеет две линии, одну для контрольной лампы и одну для соленоида.
Рисунок 2. Нагрузки должны быть подключены параллельно, если на линейной схеме должно быть подключено более одной нагрузки.
Соединения нагрузки
Нагрузка — это любое устройство, которое преобразует электрическую энергию в движение, тепло, свет или звук.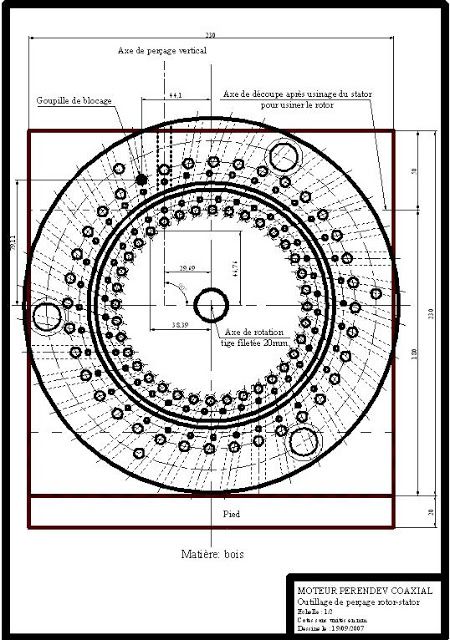 Нагрузка — это электрическое устройство на линейной схеме, которое использует электрическую мощность от L1 до L2. Катушки реле управления, соленоиды и сигнальные лампы являются нагрузками, которые прямо или косвенно подключены к L2. См. рис. 3.
Нагрузка — это электрическое устройство на линейной схеме, которое использует электрическую мощность от L1 до L2. Катушки реле управления, соленоиды и сигнальные лампы являются нагрузками, которые прямо или косвенно подключены к L2. См. рис. 3.
Рис. 3. Катушки реле управления, соленоиды и сигнальные лампы — это нагрузки, прямо или косвенно подключенные к L2.
Катушки магнитного пускателя двигателя подключаются к L2 опосредованно через нормально замкнутые (НЗ) контакты защиты от перегрузки. См. рис. 4.
Контакт перегрузки нормально замкнут и размыкается только в случае перегрузки двигателя. Количество размыкающих контактов перегрузки между катушкой пускателя и L2 зависит от типа пускателя и мощности, используемой в цепи.
Рис. 4. Катушки магнитного пускателя подключаются к L2 опосредованно через размыкающие контакты защиты от перегрузки.
На всех линейных схемах между пускателем и L2 может быть показано от одного до трех размыкающих контактов перегрузки.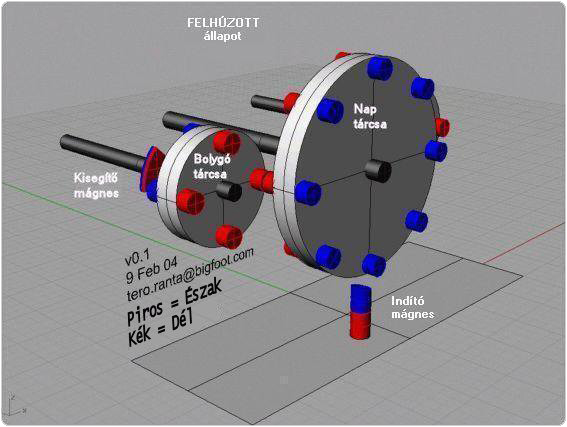 Показаны от одного до трех размыкающих контактов перегрузки, поскольку пускатели могут иметь один, два или три контакта перегрузки, в зависимости от производителя и используемого двигателя.
Показаны от одного до трех размыкающих контактов перегрузки, поскольку пускатели могут иметь один, два или три контакта перегрузки, в зависимости от производителя и используемого двигателя.
Ранние пускатели часто имели три контакта защиты от перегрузки, по одному на каждый нагреватель пускателя. Современные пускатели включают только один перегрузочный контакт.
Во избежание путаницы обычно рисуют один набор размыкающих контактов перегрузки и помечают эти контакты как все перегрузки (OL). Обозначенная таким образом перегрузка указывает на то, что цепь исправна для любого используемого двигателя или пускателя. Электрику известно, что все размыкающие контакты перегрузки, на которые рассчитан пускатель, следует подключать последовательно, если их на пускателе больше одного.
Подключения устройств управления
Устройства управления подключаются между L1 и рабочей катушкой (или нагрузкой). Рабочие катушки контакторов и пускателей активируются устройствами управления, такими как кнопки, концевые выключатели и реле давления. См. рис. 5.
См. рис. 5.
Рис. 5. Устройства управления подключены между L1 и рабочей катушкой.
Каждая линия включает как минимум одно устройство управления. Рабочая катушка включена все время, если в линию не включено устройство управления.
Цепь может содержать столько управляющих устройств, сколько требуется для того, чтобы рабочая катушка функционировала, как указано. Эти устройства управления могут быть подключены последовательно или параллельно при управлении рабочей катушкой.
Хотя цепь может включать любое количество нагрузок, общее количество нагрузок определяет требуемый размер провода и номинальные характеристики входящего источника питания (обычно трансформатора). Общий ток увеличивается по мере добавления нагрузки в цепь.
Два устройства управления (реле протока и реле температуры) могут быть подключен последовательно для управления катушкой в магнитном пускателе двигателя. Реле протока и реле температуры должны замкнуться, чтобы обеспечить прохождение тока от L1 через устройство управления, катушку магнитного пускателя и перегрузки к L2. См. рис. 6.
См. рис. 6.
Два устройства управления (реле давления и педаль) могут быть соединены параллельно для управления катушкой в магнитном пускателе двигателя. См. рис. 6.
Либо реле давления, либо педаль могут быть замкнуты, чтобы обеспечить прохождение тока от L1 через устройство управления, катушку магнитного пускателя и перегрузки к L2. Независимо от того, как устройства управления расположены в цепи, они должны быть включены между L1 и управляющей катушкой (или нагрузкой).
Контакты устройства управления могут быть нормально разомкнутыми (НО) или нормально замкнутыми (НЗ). Используемые контакты и способ соединения устройств управления в цепь (последовательное или параллельное) определяют функцию цепи.
Рис. 6. Два устройства управления могут быть соединены последовательно или параллельно для управления катушкой в магнитном пускателе двигателя.
Ссылки на номера строк
Каждая строка линейной диаграммы должна быть пронумерована, начиная с верхней строки и читая вниз. См. рис. 7.
См. рис. 7.
Линия 1 соединяет PB1 с соленоидом, чтобы завершить путь от L1 до L2.
Линия 2 соединяет PS1 с соленоидом, чтобы завершить путь от L1 до L2. PB1 и PS1 обозначены как две отдельные линии, несмотря на то, что они управляют одной и той же нагрузкой, поскольку либо кнопка, либо реле давления завершают путь от L1 к L2.
Линия 3 соединяет ножной переключатель и переключатель температуры, чтобы завершить путь от L1 к L2. Ножной переключатель и температурный переключатель появляются в одной строке, потому что и ножной переключатель, и температурный переключатель завершают путь к контрольной лампочке.
Нумерация каждой линии упрощает понимание функции цепи. Важность этой системы нумерации становится очевидной по мере усложнения цепей и добавления линий.
Рисунок 7. Каждая строка линейной диаграммы должна быть пронумерована, начиная с верхней строки и читая вниз.
Вы нашли apk для андроида? Вы можете найти новые бесплатные игры и приложения для Android.
20.1 Магнитные поля, силовые линии и сила — физика
Раздел Цели обучения
К концу этого раздела вы сможете делать следующее:
- Обобщать свойства магнитов и описывать, как некоторые немагнитные материалы могут намагничиваться
- Описывать и интерпретировать рисунки магнитных полей вокруг постоянных магнитов и проводов с током
- Расчет величины и направления магнитной силы в магнитном поле и силы, действующей на проводник с током в магнитном поле
Поддержка учителей
Поддержка учителей
Цели обучения в этом разделе помогут вашим учащимся освоить следующие стандарты:
- (5) Учащийся знает природу сил в физическом мире. Ожидается, что студент:
- (G) исследуют и описывают взаимосвязь между электрическими и магнитными полями в таких приложениях, как генераторы, двигатели и трансформаторы.
Кроме того, руководство по физике для средней школы рассматривает содержание этого раздела лабораторной работы под названием «Магнетизм», а также следующие стандарты:
- (5) Научные концепции. Учащийся знает природу сил в физическом мире. Ожидается, что студент:
- (ГРАММ)
исследовать и описывать взаимосвязь между электрическими и магнитными полями в таких приложениях, как генераторы, двигатели и трансформаторы.
- (ГРАММ)
 Учащийся знает природу сил в физическом мире. Ожидается, что студент:
Учащийся знает природу сил в физическом мире. Ожидается, что студент:Основные термины раздела
| Температура Кюри | домен | электромагнит | электромагнетизм | ферромагнитный |
| магнитный диполь | магнитное поле | магнитный полюс | намагниченный | северный полюс |
| постоянный магнит | правило правой руки | соленоид | южный полюс |
Магниты и намагничивание
Люди знали о магнитах и магнетизме тысячи лет. Самые ранние записи относятся к древним временам, особенно в регионе Малой Азии, называемом Магнезия — название этого региона является источником таких слов, как 9. 1636 магнит . Магнитные породы, найденные в Магнезии, которая сейчас является частью западной Турции, вызывали интерес в древние времена. Когда люди впервые открыли магнитные породы, они, вероятно, обнаружили, что некоторые части этих пород сильнее притягивают кусочки железа или других магнитных пород, чем другие части. Эти области называются полюсами магнита. Магнитный полюс — это часть магнита, оказывающая наибольшую силу на другие магниты или магнитный материал, например железо. Например, полюса стержневого магнита, показанного на рис. 20.2, находятся там, где сосредоточены скрепки.
1636 магнит . Магнитные породы, найденные в Магнезии, которая сейчас является частью западной Турции, вызывали интерес в древние времена. Когда люди впервые открыли магнитные породы, они, вероятно, обнаружили, что некоторые части этих пород сильнее притягивают кусочки железа или других магнитных пород, чем другие части. Эти области называются полюсами магнита. Магнитный полюс — это часть магнита, оказывающая наибольшую силу на другие магниты или магнитный материал, например железо. Например, полюса стержневого магнита, показанного на рис. 20.2, находятся там, где сосредоточены скрепки.
Рисунок
20,2
Стержневой магнит со скрепками притягивается к двум полюсам.
Если стержневой магнит подвешен так, что он свободно вращается, один полюс магнита всегда будет повернут к северу, а противоположный полюс будет обращен к югу. Это открытие привело к созданию компаса, который представляет собой просто небольшой удлиненный магнит, установленный так, чтобы он мог свободно вращаться. Пример компаса показан на рис. 20.3. Полюс магнита, обращенный на север, называется северным полюсом, а противоположный полюс магнита называется южным полюсом.
Пример компаса показан на рис. 20.3. Полюс магнита, обращенный на север, называется северным полюсом, а противоположный полюс магнита называется южным полюсом.
Рисунок
20,3
Компас представляет собой удлиненный магнит, установленный в устройстве, позволяющем магниту свободно вращаться.
Открытие того, что один конкретный полюс магнита ориентирован на север, тогда как другой полюс ориентирован на юг, позволило людям идентифицировать северный и южный полюса любого магнита. Затем было замечено, что северные полюса двух разных магнитов отталкивают друг друга, а также южные полюса. И наоборот, северный полюс одного магнита притягивает южный полюс другого магнита. Эта ситуация аналогична ситуации с электрическим зарядом, когда одноименные заряды отталкиваются, а разноименные притягиваются. В магнитах мы просто заменяем заряд на полюс : Одинаковые полюса отталкиваются, а разные полюса притягиваются. Это обобщено на рис. 20.4, на котором показано, как сила между магнитами зависит от их взаимной ориентации.
Рисунок
20,4
В зависимости от их относительной ориентации полюса магнита будут либо притягиваться, либо отталкиваться друг от друга.
Рассмотрим еще раз тот факт, что полюс магнита, обращенный на север, называется северным полюсом магнита. Если разные полюса притягиваются, то магнитный полюс Земли, близкий к географическому Северному полюсу, должен быть магнитным южным полюсом! Точно так же магнитный полюс Земли, близкий к географическому Южному полюсу, должен быть магнитным северным полюсом. Эта ситуация изображена на рис. 20.5, на котором Земля представлена как содержащая гигантский внутренний стержневой магнит с его южным магнитным полюсом на географическом северном полюсе и наоборот. Если бы мы каким-то образом подвесили гигантский стержневой магнит в космосе рядом с Землей, то северный полюс космического магнита притянулся бы к южному полюсу внутреннего магнита Земли. По сути, это то, что происходит со стрелкой компаса: ее северный магнитный полюс притягивается к южному полюсу магнита внутреннего магнита Земли.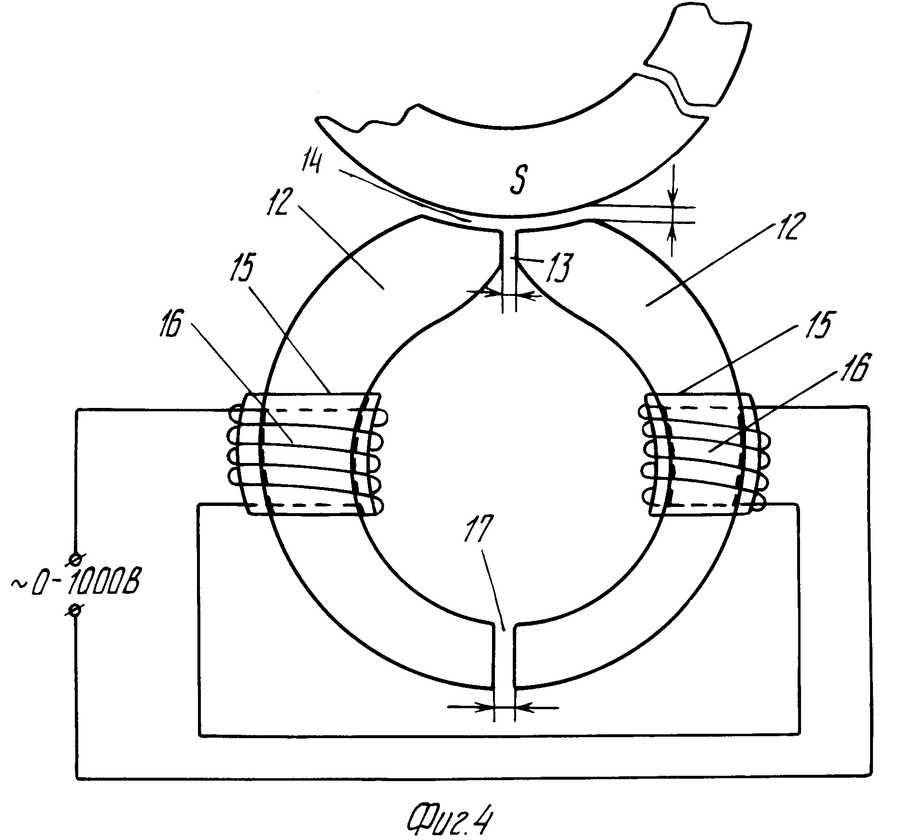
Рисунок
20,5
Землю можно представить как содержащую гигантский магнит, пронизывающий ее ядро. Магнитный южный полюс магнита Земли находится на географическом Северном полюсе, поэтому северный полюс магнитов притягивается к Северному полюсу, поэтому северный полюс магнитов получил свое название. Точно так же южный полюс магнитов притягивается к географическому Южному полюсу Земли.
Что будет, если разрезать стержневой магнит пополам? Вы получаете один магнит с двумя южными полюсами и один магнит с двумя северными полюсами? Ответ отрицательный: каждая половина стержневого магнита имеет северный полюс и южный полюс. Вы даже можете продолжать разрезать каждый кусок стержневого магнита пополам, и вы всегда будете получать новый, меньший магнит с двумя противоположными полюсами. Как показано на рис. 20.6, вы можете продолжить этот процесс вплоть до атомного масштаба и обнаружите, что даже самые маленькие частицы, ведущие себя как магниты, имеют два противоположных полюса. На самом деле, ни в одном эксперименте не было найдено ни одного объекта с одним магнитным полюсом, от мельчайших субатомных частиц, таких как электроны, до самых больших объектов во Вселенной, таких как звезды. Поскольку магниты всегда имеют два полюса, их называют магнитными диполями.1636 di означает два . Ниже мы увидим, что магнитные диполи обладают свойствами, аналогичными электрическим диполям.
На самом деле, ни в одном эксперименте не было найдено ни одного объекта с одним магнитным полюсом, от мельчайших субатомных частиц, таких как электроны, до самых больших объектов во Вселенной, таких как звезды. Поскольку магниты всегда имеют два полюса, их называют магнитными диполями.1636 di означает два . Ниже мы увидим, что магнитные диполи обладают свойствами, аналогичными электрическим диполям.
Рисунок
20,6
Все магниты имеют два противоположных полюса, от самых маленьких, таких как субатомные частицы, до самых больших, таких как звезды.
Смотреть физику
Введение в магнетизм
Это видео представляет собой интересное введение в магнетизм и обсуждает, в частности, как электроны вокруг своих атомов способствуют магнитным эффектам, которые мы наблюдаем.
Проверка захвата
К какому магнитному полюсу Земли притягивается северный полюс стрелки компаса?
- Северный полюс стрелки компаса притягивается к северному магнитному полюсу Земли, который расположен вблизи географического Северного полюса Земли.
- Северный полюс стрелки компаса притягивается к южному магнитному полюсу Земли, который расположен вблизи географического Северного полюса Земли.
- Северный полюс стрелки компаса притягивается к северному магнитному полюсу Земли, который расположен вблизи географического Южного полюса Земли.
- Северный полюс стрелки компаса притягивается к южному магнитному полюсу Земли, который расположен вблизи географического Южного полюса Земли.

Только некоторые материалы, такие как железо, кобальт, никель и гадолиний, проявляют сильные магнитные эффекты. Такие материалы называются ферромагнитными, от латинского слова ferrum для железа. Другие материалы проявляют слабые магнитные эффекты, которые можно обнаружить только с помощью чувствительных приборов. Мало того, что ферромагнетики сильно реагируют на магниты — подобно тому, как железо притягивается к магнитам, — они также могут намагничиваться сами, то есть их можно сделать магнитными или превратить в постоянные магниты (рис.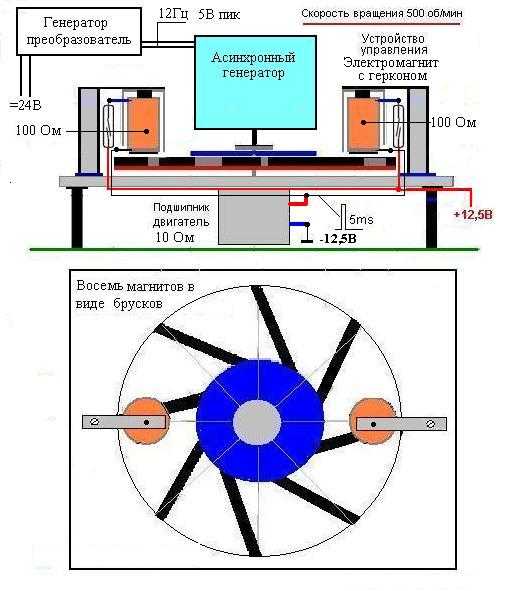 20.7). Постоянный магнит — это просто материал, который сохраняет свои магнитные свойства в течение длительного времени, даже при воздействии размагничивающих воздействий.
20.7). Постоянный магнит — это просто материал, который сохраняет свои магнитные свойства в течение длительного времени, даже при воздействии размагничивающих воздействий.
Рисунок
20,7
Ненамагниченный кусок железа помещают между двумя магнитами, нагревают, а затем охлаждают или просто постукивают в холодном состоянии. Железо становится постоянным магнитом с полюсами, выровненными, как показано: его южный полюс примыкает к северному полюсу исходного магнита, а его северный полюс примыкает к южному полюсу исходного магнита. Обратите внимание, что силы притяжения создаются между центральным магнитом и внешними магнитами.
Когда магнит приближается к ранее ненамагниченному ферромагнитному материалу, он вызывает локальное намагничивание материала с ближайшими противоположными полюсами, как показано в правой части рис. 20.7. Это вызывает силу притяжения, поэтому ненамагниченное железо притягивается к магниту.
То, что происходит в микроскопическом масштабе, показано на рис.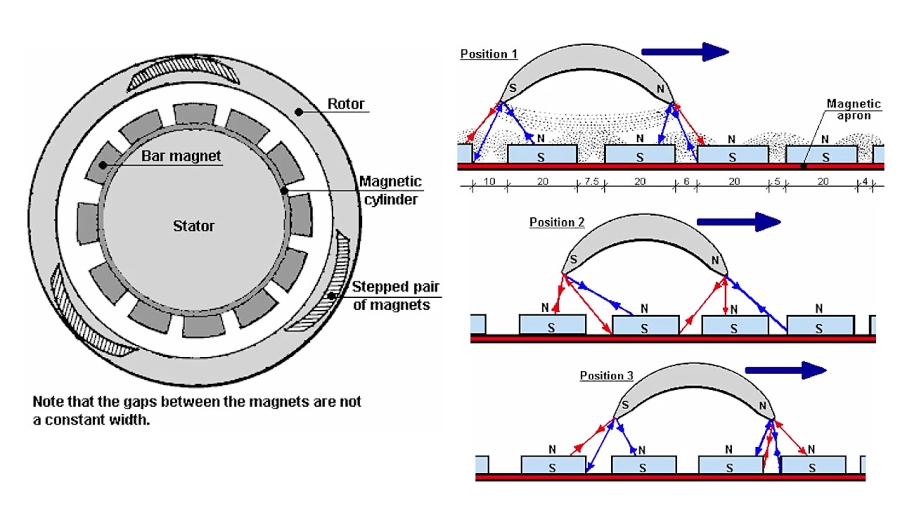 7(а). Области внутри материала, называемые доменами, действуют как маленькие стержневые магниты. Внутри доменов магнитные полюса отдельных атомов выровнены. Каждый атом действует как крошечный стержневой магнит. Домены малы и беспорядочно ориентированы в ненамагниченном ферромагнитном объекте. В ответ на внешнее магнитное поле домены могут увеличиваться до миллиметрового размера, выстраиваясь, как показано на рисунке 7(b). Эту индуцированную намагниченность можно сделать постоянной, если материал нагреть, а затем охладить, или просто постучать в присутствии других магнитов.
7(а). Области внутри материала, называемые доменами, действуют как маленькие стержневые магниты. Внутри доменов магнитные полюса отдельных атомов выровнены. Каждый атом действует как крошечный стержневой магнит. Домены малы и беспорядочно ориентированы в ненамагниченном ферромагнитном объекте. В ответ на внешнее магнитное поле домены могут увеличиваться до миллиметрового размера, выстраиваясь, как показано на рисунке 7(b). Эту индуцированную намагниченность можно сделать постоянной, если материал нагреть, а затем охладить, или просто постучать в присутствии других магнитов.
Рисунок
20,8
(а) Ненамагниченный кусок железа или другого ферромагнитного материала имеет случайно ориентированные домены. (б) При намагничивании внешним магнитом домены демонстрируют большее выравнивание, и одни растут за счет других. Отдельные атомы выровнены внутри доменов; каждый атом действует как крошечный стержневой магнит.
И наоборот, постоянный магнит можно размагнитить сильными ударами или нагреванием в отсутствие другого магнита.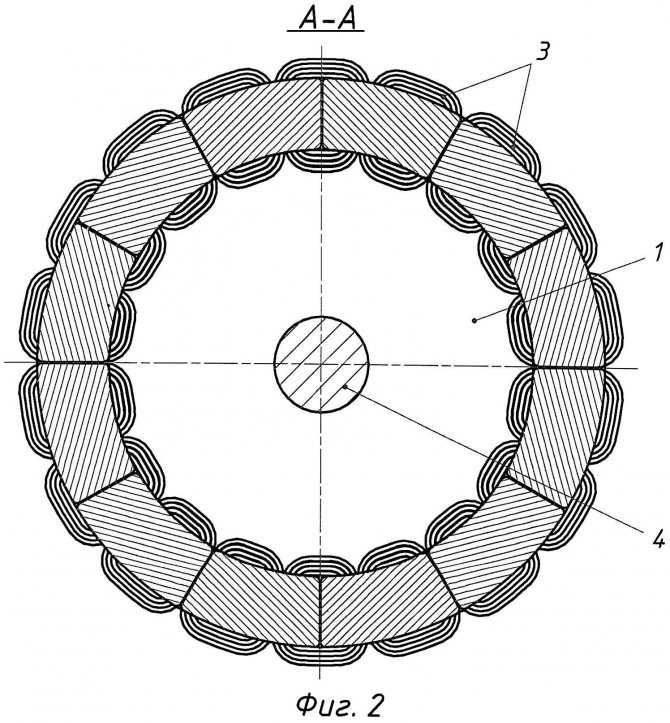 Увеличение теплового движения при более высокой температуре может нарушить и рандомизировать ориентацию и размер доменов. Для ферромагнетиков существует четко определенная температура, называемая температурой Кюри, выше которой они не могут намагничиваться. Температура Кюри для железа составляет 1043 К (770°С°С), что значительно выше комнатной температуры. Есть несколько элементов и сплавов, которые имеют температуру Кюри намного ниже комнатной температуры и являются ферромагнитными только при этих температурах.
Увеличение теплового движения при более высокой температуре может нарушить и рандомизировать ориентацию и размер доменов. Для ферромагнетиков существует четко определенная температура, называемая температурой Кюри, выше которой они не могут намагничиваться. Температура Кюри для железа составляет 1043 К (770°С°С), что значительно выше комнатной температуры. Есть несколько элементов и сплавов, которые имеют температуру Кюри намного ниже комнатной температуры и являются ферромагнитными только при этих температурах.
Снап Лаборатория
Магниты на холодильник
Мы знаем, что одинаковые магнитные полюса отталкиваются, а противоположные притягиваются. Посмотрите, сможете ли вы показать это для двух магнитов на холодильник. Прилипнут ли магниты, если их перевернуть? Почему они все равно прилипают к дверце холодильника? Что можно сказать о магнитных свойствах двери холодильника возле магнита? Прилипают ли магниты на холодильник к металлическим или пластиковым ложкам? Они прилипают ко всем типам металлов?
Поддержка учителей
Поддержка учителей
Удерживание магнита рядом с ненамагниченным ферромагнитным материалом приведет к магнитной поляризации ферромагнитного материала, заставляя атомные магнитные диполи ориентироваться в сторону внешнего магнита. Это похоже на электрическую поляризацию. Таким образом, ферромагнитный материал намагничивается в присутствии внешнего магнита, и два магнита притягиваются друг к другу. Чтобы магнит прилипал к двери холодильника, дверь должна содержать ферромагнитный материал. Магниты будут прилипать к ложкам из черных металлов, например к ложкам с железом внутри, но не к ложкам из цветных металлов, например ложкам из алюминия или серебра, и не будут прилипать к магниту. Магниты также не будут прилипать к пластиковым ложкам.
Это похоже на электрическую поляризацию. Таким образом, ферромагнитный материал намагничивается в присутствии внешнего магнита, и два магнита притягиваются друг к другу. Чтобы магнит прилипал к двери холодильника, дверь должна содержать ферромагнитный материал. Магниты будут прилипать к ложкам из черных металлов, например к ложкам с железом внутри, но не к ложкам из цветных металлов, например ложкам из алюминия или серебра, и не будут прилипать к магниту. Магниты также не будут прилипать к пластиковым ложкам.
Проверка захвата
У вас есть один магнит с помеченными северным и южным полюсами. Как можно использовать этот магнит для определения северного и южного полюсов других магнитов?
- Если северный полюс известного магнита отталкивается полюсом неизвестного магнита при их сближении, то этот полюс неизвестного магнита является его северным полюсом; в противном случае это его южный полюс.
- Если северный полюс известного магнита притягивается к полюсу неизвестного магнита при их сближении, то этот полюс неизвестного магнита является его северным полюсом; в противном случае это его южный полюс.

Магнитные поля
Таким образом, мы видели, что между магнитами и между магнитами и ферромагнитными материалами могут действовать силы без какого-либо контакта между объектами. Это напоминает электрические силы, которые также действуют на расстояниях. Электрические силы описываются с использованием концепции электрического поля, которое представляет собой силовое поле вокруг электрических зарядов, описывающее силу, действующую на любой другой заряд, помещенный в поле. Точно так же магнит создает вокруг себя магнитное поле, которое описывает силу, действующую на другие магниты, находящиеся в этом поле. Как и в случае с электрическими полями, графическое изображение силовых линий магнитного поля очень полезно для визуализации силы и направления магнитного поля.
Как показано на рис. 20.9, направление силовых линий магнитного поля определяется как направление, в котором указывает северный полюс стрелки компаса. Если вы поместите компас рядом с северным полюсом магнита, северный полюс стрелки компаса будет отталкиваться и указывать в сторону от магнита.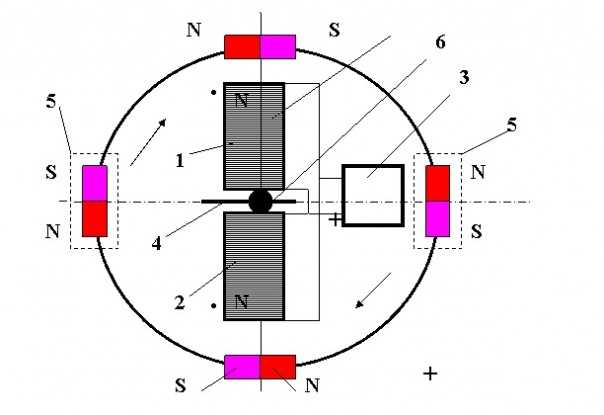 Таким образом, силовые линии магнитного поля направлены от северного полюса магнита к его южному полюсу.
Таким образом, силовые линии магнитного поля направлены от северного полюса магнита к его южному полюсу.
Рисунок
20,9
Черные линии представляют линии магнитного поля стержневого магнита. Линии поля указывают в том направлении, куда указывал бы северный полюс маленького компаса, как показано слева. Линии магнитного поля никогда не останавливаются, поэтому линии поля фактически проникают в магнит, образуя полные петли, как показано справа.
Линии магнитного поля можно нанести на карту с помощью небольшого компаса. Компас перемещается от точки к точке вокруг магнита, и в каждой точке проводится короткая линия в направлении стрелки, как показано на рис. 20.10. Соединение линий вместе показывает путь линии магнитного поля. Другой способ визуализировать силовые линии магнитного поля — рассыпать железные опилки вокруг магнита. Опилки будут ориентироваться вдоль силовых линий магнитного поля, образуя узор, подобный показанному справа на рис. 20.10.
Виртуальная физика
Использование компаса для определения магнитного поля
Эта симуляция представляет собой стержневой магнит и небольшой компас. Начните с перетаскивания компаса вокруг стержневого магнита, чтобы увидеть, в каком направлении указывает магнитное поле. Обратите внимание, что сила магнитного поля представлена яркостью значков магнитного поля в сетке вокруг магнита. Используйте измеритель магнитного поля, чтобы проверить напряженность поля в нескольких точках вокруг стержневого магнита. Вы также можете изменить полярность магнита или поместить Землю на изображение, чтобы увидеть, как ориентируется компас.
Начните с перетаскивания компаса вокруг стержневого магнита, чтобы увидеть, в каком направлении указывает магнитное поле. Обратите внимание, что сила магнитного поля представлена яркостью значков магнитного поля в сетке вокруг магнита. Используйте измеритель магнитного поля, чтобы проверить напряженность поля в нескольких точках вокруг стержневого магнита. Вы также можете изменить полярность магнита или поместить Землю на изображение, чтобы увидеть, как ориентируется компас.
Проверка захвата
С помощью ползунка в правом верхнем углу окна моделирования установите напряженность магнитного поля на 100 процентов. Теперь используйте измеритель магнитного поля, чтобы ответить на следующий вопрос: Вблизи магнита, где магнитное поле самое сильное, а где самое слабое? Не забудьте заглянуть внутрь стержневого магнита.
- Магнитное поле самое сильное в центре и самое слабое между двумя полюсами сразу за пределами стержневого магнита. Линии магнитного поля имеют наибольшую плотность в центре и наименьшую плотность между двумя полюсами сразу за пределами стержневого магнита.
- Магнитное поле самое сильное в центре и самое слабое между двумя полюсами сразу за пределами стержневого магнита. Линии магнитного поля наименее плотны в центре и наиболее плотны между двумя полюсами сразу за пределами стержневого магнита.
- Магнитное поле самое слабое в центре и самое сильное между двумя полюсами сразу за пределами стержневого магнита. Линии магнитного поля имеют наибольшую плотность в центре и наименьшую плотность между двумя полюсами сразу за пределами стержневого магнита.
- Магнитное поле самое слабое в центре и самое сильное между двумя полюсами сразу за пределами стержневого магнита, а линии магнитного поля наименее плотны в центре и наиболее плотны между двумя полюсами сразу за пределами стержневого магнита.
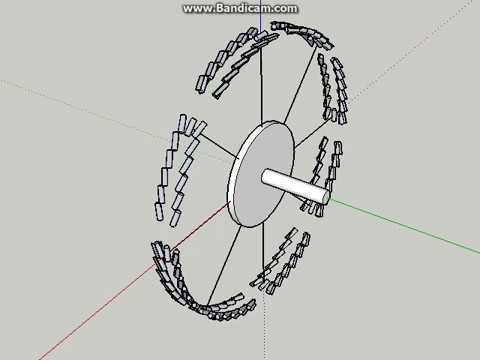
Рисунок
20.10
Линии магнитного поля можно нарисовать, перемещая небольшой компас от точки к точке вокруг магнита. В каждой точке нарисуйте короткую линию в направлении стрелки компаса. Соединение точек вместе показывает путь силовых линий магнитного поля.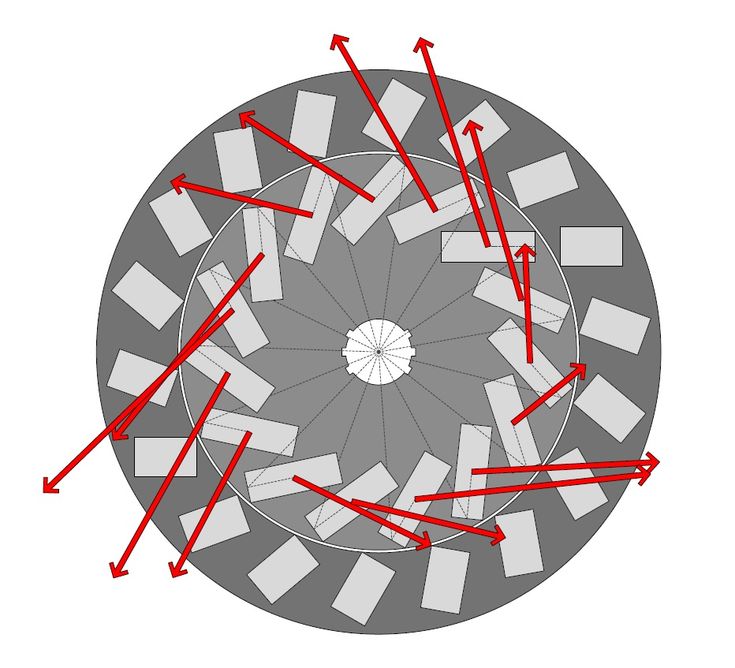 Другой способ визуализировать силовые линии магнитного поля — рассыпать железные опилки вокруг магнита, как показано справа.
Другой способ визуализировать силовые линии магнитного поля — рассыпать железные опилки вокруг магнита, как показано справа.
Когда два магнита приближаются друг к другу, силовые линии магнитного поля возмущаются, как это происходит с силовыми линиями электрического поля, когда сближаются два электрических заряда. Сближение двух северных полюсов или двух южных полюсов вызовет отталкивание, и силовые линии магнитного поля отклонятся друг от друга. Это показано на рис. 20.11, на котором показаны силовые линии магнитного поля, создаваемые двумя близко расположенными северными полюсами стержневого магнита. Когда противоположные полюса двух магнитов сближаются, силовые линии магнитного поля соединяются и становятся более плотными между полюсами. Эта ситуация показана на рис. 20.11.
Рисунок
20.11
(а) Когда два северных полюса сближаются вместе, силовые линии магнитного поля отталкиваются друг от друга, и два магнита испытывают силу отталкивания. То же самое происходит, если два южных полюса приближаются друг к другу. б) если сблизить противоположные полюса, силовые линии магнитного поля между полюсами становятся более плотными, и магниты испытывают силу притяжения.
б) если сблизить противоположные полюса, силовые линии магнитного поля между полюсами становятся более плотными, и магниты испытывают силу притяжения.
Как и электрическое поле, магнитное поле сильнее там, где линии плотнее. Таким образом, между двумя северными полюсами на рис. 20.11 магнитное поле очень слабое, потому что плотность магнитного поля почти равна нулю. Компас, помещенный в эту точку, будет вращаться свободно, если мы проигнорируем магнитное поле Земли. И наоборот, силовые линии магнитного поля между северным и южным полюсами на рис. 20.11 очень плотные, что указывает на то, что магнитное поле в этой области очень сильное. Компас, размещенный здесь, быстро выровняется по магнитному полю и укажет на южный полюс справа.
Поддержка учителей
Поддержка учителей
Предупреждение о заблуждении
Плотность силовых линий магнитного поля на рис. 20.11 показывает величину силы, которая будет приложена к небольшому пробному магниту, помещенному в это поле.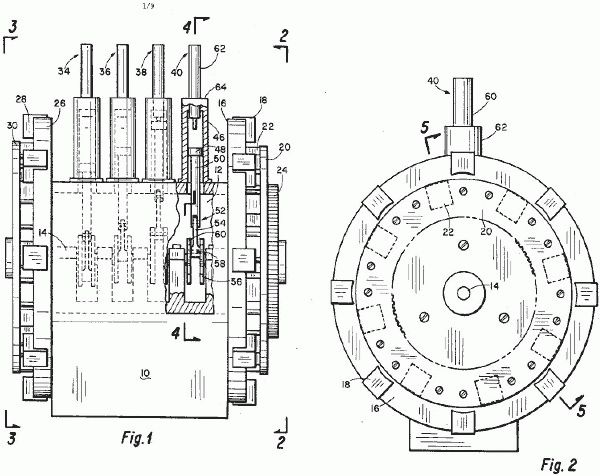 Плотность не указывает на силу между двумя магнитами, создающими поле. Величина силы между двумя магнитами одинакова в обоих случаях на рис. 20.11. Это можно понять, представив, что вы помещаете один из магнитов в поле другого магнита. Эта ситуация симметрична: магнитные поля выглядят одинаково — за исключением направления — для обеих ситуаций, показанных на рис. 20.11. Поскольку магниты имеют одинаковую силу, они возмущают магнитное поле противоположного магнита, поэтому магнитное поле необходимо исследовать с помощью небольшого магнита, такого как компас.
Плотность не указывает на силу между двумя магнитами, создающими поле. Величина силы между двумя магнитами одинакова в обоих случаях на рис. 20.11. Это можно понять, представив, что вы помещаете один из магнитов в поле другого магнита. Эта ситуация симметрична: магнитные поля выглядят одинаково — за исключением направления — для обеих ситуаций, показанных на рис. 20.11. Поскольку магниты имеют одинаковую силу, они возмущают магнитное поле противоположного магнита, поэтому магнитное поле необходимо исследовать с помощью небольшого магнита, такого как компас.
Обратите внимание, что не только магниты создают магнитные поля. В начале девятнадцатого века люди обнаружили, что электрические токи вызывают магнитные эффекты. Первое значительное наблюдение было сделано датским ученым Гансом Христианом Эрстедом (1777–1851), который обнаружил, что стрелка компаса отклоняется проводом с током. Это было первое серьезное доказательство того, что движение электрических зарядов имеет какую-либо связь с магнитами. Электромагнит — это устройство, которое использует электрический ток для создания магнитного поля. Эти временно индуцированные магниты называются электромагнитами. Электромагниты используются во всем: от подъемного крана, который поднимает сломанные автомобили, до управления лучом 9Ускоритель частиц с окружностью 0 км к магнитам медицинских аппаратов визуализации (см. рис. 20.12).
Электромагнит — это устройство, которое использует электрический ток для создания магнитного поля. Эти временно индуцированные магниты называются электромагнитами. Электромагниты используются во всем: от подъемного крана, который поднимает сломанные автомобили, до управления лучом 9Ускоритель частиц с окружностью 0 км к магнитам медицинских аппаратов визуализации (см. рис. 20.12).
Рисунок
20.12
Прибор для магнитно-резонансной томографии (МРТ). В устройстве используется электромагнит с цилиндрической катушкой для создания основного магнитного поля. Больной отправляется в тоннель на каталке. (кредит: Билл Макчесни, Flickr)
Магнитное поле, создаваемое электрическим током в длинном прямом проводе, показано на рис. 20.13. Линии магнитного поля образуют концентрические окружности вокруг проволоки. Направление магнитного поля можно определить с помощью правило правой руки . Это правило проявляется в нескольких местах при изучении электричества и магнетизма. Применительно к прямому проводу с током правило правой руки гласит, что, если большой палец правой руки направлен в направлении тока, магнитное поле будет направлено в том направлении, в котором сгибаются пальцы правой руки, как показано на рис. 20.13. Если провод очень длинный по сравнению с расстоянием r от провода, напряженность магнитного поля B определяется как
Применительно к прямому проводу с током правило правой руки гласит, что, если большой палец правой руки направлен в направлении тока, магнитное поле будет направлено в том направлении, в котором сгибаются пальцы правой руки, как показано на рис. 20.13. Если провод очень длинный по сравнению с расстоянием r от провода, напряженность магнитного поля B определяется как
Bпрямой провод=μ0I2πrBпрямой провод=μ0I2πr
20,1
, где I — сила тока в проводе в амперах. Единицей измерения магнитного поля в системе СИ является тесла (Тл). Символ μ0μ0 — читается как «мю-ноль» — является константой, называемой «проницаемостью свободного пространства», и задается как
.
μ0=4π×10−7T⋅м/A.μ0=4π×10−7T⋅м/A.
20,2
Рисунок
20.13
На этом изображении показано, как использовать правило правой руки для определения направления магнитного поля, создаваемого током, протекающим по прямому проводу. Направьте большой палец правой руки в направлении тока, и магнитное поле будет направлено в том направлении, в котором сгибаются ваши пальцы.
Направьте большой палец правой руки в направлении тока, и магнитное поле будет направлено в том направлении, в котором сгибаются ваши пальцы.
Смотреть физику
Магнитное поле, вызванное электрическим током
В этом видео показано магнитное поле, создаваемое прямым проводом с током. Он использует правило правой руки для определения направления магнитного поля, а также представляет и обсуждает формулу для напряженности магнитного поля из-за прямого провода с током.
Проверка захвата
Длинный прямой провод помещается на столешницу, и электрический ток течет по проводу справа налево. Если вы посмотрите на конец провода с левого конца, магнитное поле движется по часовой стрелке или против часовой стрелки?
- Если направить большой палец правой руки в направлении, противоположном направлению тока, пальцы правой руки свернутся против часовой стрелки, поэтому магнитное поле будет направлено против часовой стрелки.
- Если направить большой палец правой руки в направлении, противоположном направлению тока, пальцы правой руки свернутся по часовой стрелке, поэтому магнитное поле будет направлено по часовой стрелке.
- Если направить большой палец правой руки в направлении тока, пальцы правой руки свернутся против часовой стрелки, поэтому магнитное поле будет направлено против часовой стрелки.
- Если направить большой палец правой руки в направлении тока, пальцы правой руки свернутся по часовой стрелке, поэтому магнитное поле будет направлено по часовой стрелке.

Теперь представьте, что проволока намотана на цилиндр, после чего цилиндр снят. В результате получится проволочная катушка, как показано на рис. 20.14. Это называется соленоид. Чтобы найти направление магнитного поля, создаваемого соленоидом, примените правило правой руки к нескольким точкам на катушке. Вы должны быть в состоянии убедить себя, что внутри катушки магнитное поле направлено слева направо. На самом деле, еще одно применение правила правой руки состоит в том, чтобы согнуть пальцы правой руки вокруг катушки в направлении, в котором течет ток. Затем большой палец правой руки указывает направление магнитного поля внутри катушки: в данном случае слева направо.
На самом деле, еще одно применение правила правой руки состоит в том, чтобы согнуть пальцы правой руки вокруг катушки в направлении, в котором течет ток. Затем большой палец правой руки указывает направление магнитного поля внутри катушки: в данном случае слева направо.
Рисунок
20.14
Проволочная катушка, через которую проходит ток, как показано на рисунке, создает магнитное поле в направлении, указанном красной стрелкой.
Каждый виток провода вносит свой вклад в магнитное поле внутри соленоида. Поскольку силовые линии магнитного поля должны образовывать замкнутые петли, силовые линии замыкают петлю вне соленоида. Силовые линии магнитного поля внутри соленоида гораздо плотнее, чем снаружи соленоида. Результирующее магнитное поле очень похоже на поле стержневого магнита, как показано на рис. 20.15. Напряженность магнитного поля глубоко внутри соленоида равна
Bsolenoid=μ0NIℓ,Bsolenoid=μ0NIℓ,
20,3
, где N — количество витков провода в соленоиде, а ℓℓ — длина соленоида.
Рисунок
20.15
Железные опилки показывают картину магнитного поля вокруг (а) соленоида и (б) стержневого магнита. Картины полей очень похожи, особенно вблизи концов соленоида и стержневого магнита.
Виртуальная физика
Электромагниты
Используйте эту симуляцию, чтобы визуализировать магнитное поле, создаваемое соленоидом. Обязательно нажмите на вкладку с надписью «Электромагнит». Вы можете управлять переменным или постоянным током через соленоид, выбрав соответствующий источник тока. Используйте измеритель поля для измерения силы магнитного поля, а затем измените количество витков в соленоиде, чтобы увидеть, как это влияет на напряженность магнитного поля.
Выберите батарею в качестве источника тока и установите количество витков проводов равным четырем. При ненулевом токе, проходящем через соленоид, измерьте напряженность магнитного поля в точке. Теперь уменьшите количество проволочных петель до двух. Как изменится напряженность магнитного поля в выбранной вами точке?
Как изменится напряженность магнитного поля в выбранной вами точке?
Напряженность магнитного поля не изменится, если число витков уменьшится с четырех до двух.
- г.
Напряженность магнитного поля уменьшается до половины исходного значения при уменьшении количества витков с четырех до двух.
Напряженность магнитного поля увеличивается в два раза по сравнению с исходным значением при уменьшении количества витков с четырех до двух.
Напряженность магнитного поля увеличивается в четыре раза по сравнению с исходным значением при уменьшении количества витков с четырех до двух.
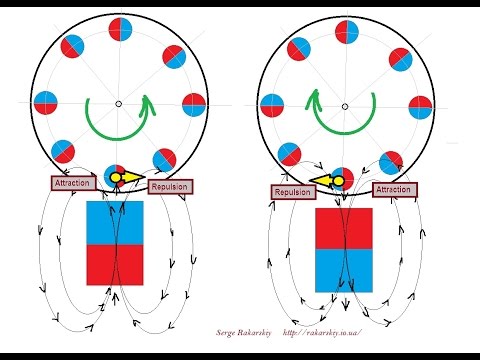
Магнитная сила
Если движущийся электрический заряд, то есть электрический ток, создает магнитное поле, которое может воздействовать на другой магнит, то согласно третьему закону Ньютона должно быть верно обратное. Другими словами, заряд, движущийся через магнитное поле, создаваемое другим объектом, должен испытывать силу — и это именно то, что мы находим. В качестве конкретного примера рассмотрим рис. 20.16, на котором изображен заряд q , движущийся со скоростью v→v→ через магнитное поле B→B→ между полюсами постоянного магнита. Магнитуда F от силы, испытываемой этим зарядом, составляет
F=qvBsinθ, F=qvBsinθ,
20,4
, где θθ — угол между скоростью заряда и магнитным полем.
Направление силы можно найти, используя другую версию правила правой руки: сначала мы соединяем хвосты вектора скорости и вектора магнитного поля, как показано в шаге 1 на рис. 20.16. Затем мы сгибаем пальцы правой руки от v→v→ к B→B→, как показано в шаге (2) на рис. 20.16. Направление, в котором указывает большой палец правой руки, является направлением силы. Для заряда на рис. 20.16 мы видим, что сила направлена на страницу.
20.16. Затем мы сгибаем пальцы правой руки от v→v→ к B→B→, как показано в шаге (2) на рис. 20.16. Направление, в котором указывает большой палец правой руки, является направлением силы. Для заряда на рис. 20.16 мы видим, что сила направлена на страницу.
Обратите внимание, что коэффициент sinθsinθ в уравнении F=qvBsinθF=qvBsinθ
означает, что к заряду, движущемуся параллельно магнитному полю, приложена нулевая сила, потому что θ=0θ=0 и sin0=0sin0=0 . Максимальная сила, которую может испытывать заряд, возникает, когда он движется перпендикулярно магнитному полю, потому что θ = 90 ° θ = 90 °.
и sin90°=1.sin90°=1.
Рисунок
20.16
а) Протон движется в однородном магнитном поле. (б) Используя правило правой руки, находим, что сила, действующая на протон, направлена на страницу.
Вместо одиночного заряда, движущегося через магнитное поле, рассмотрим теперь постоянный ток I , движущийся по прямому проводу. Если мы поместим эту проволоку в однородное магнитное поле, как показано на рис.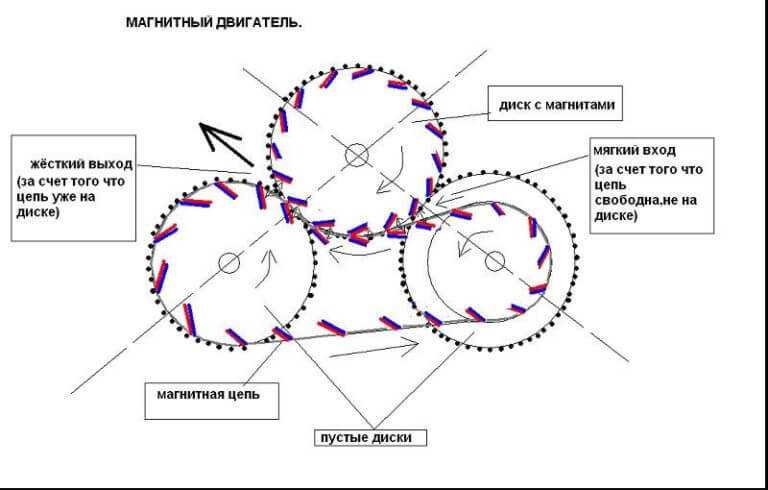 20.19, какова сила, действующая на проволоку или, точнее, на электроны в проволоке? В электрическом токе участвуют движущиеся заряды. Если заряды q перемещаются на расстояние ℓℓ за время t , то их скорость равна v=ℓ/t.v=ℓ/t. Вставка этого в уравнение F=qvBsinθF=qvBsinθ дает
20.19, какова сила, действующая на проволоку или, точнее, на электроны в проволоке? В электрическом токе участвуют движущиеся заряды. Если заряды q перемещаются на расстояние ℓℓ за время t , то их скорость равна v=ℓ/t.v=ℓ/t. Вставка этого в уравнение F=qvBsinθF=qvBsinθ дает
F=q(ℓt)Bsinθ=(qt)ℓBsinθ.F=q(ℓt)Bsinθ=(qt)ℓBsinθ.
20,5
Множитель q / t в этом уравнении есть не что иное, как ток в проводе. Таким образом, используя I=q/tI=q/t, мы получаем
F=IℓBsinθ(1.4).F=IℓBsinθ(1.4).
20,6
Это уравнение дает силу, действующую на прямолинейный проводник с током длиной ℓℓ в магнитном поле напряженностью B . Угол θθ — это угол между вектором тока и вектором магнитного поля. Обратите внимание, что ℓℓ — это длина провода, находящегося в магнитном поле и для которого θ≠0,θ≠0, как показано на рис.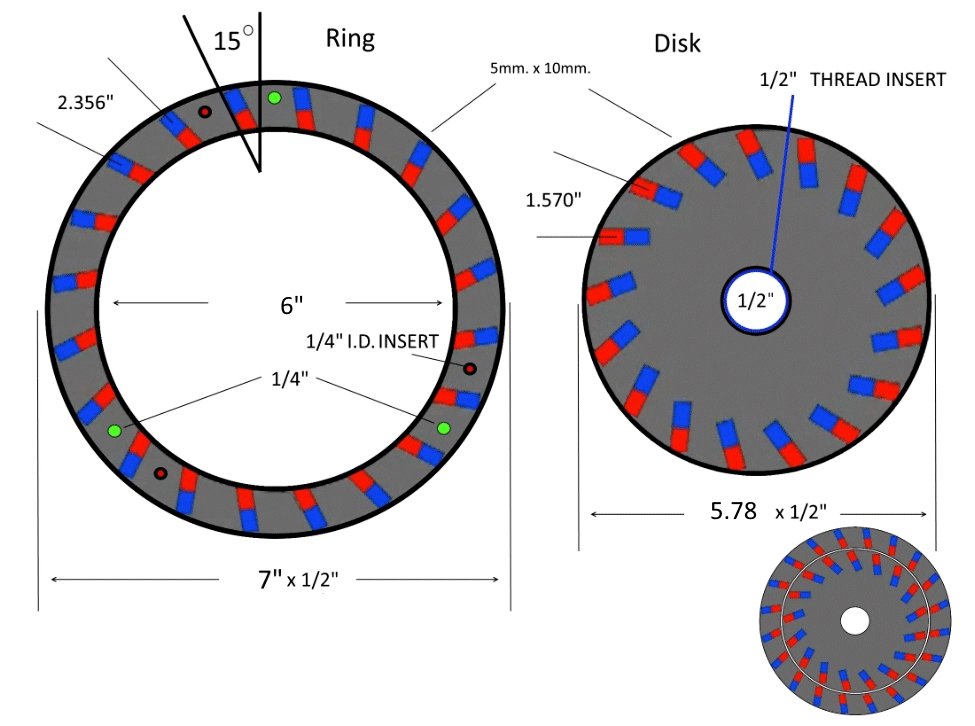 20.19..
20.19..
Направление силы определяется так же, как и для одиночного заряда. Согните пальцы правой руки от вектора I к вектору B , и большой палец правой руки укажет в направлении силы, действующей на провод. Для проволоки, показанной на рис. 20.19, сила направлена на страницу.
Рисунок
20.19
Прямой провод с током I в магнитном поле B . Сила, действующая на проволоку, направлена на страницу. Длина ℓℓ — это длина провода, равная в магнитном поле.
В этом разделе вы могли заметить симметрию между магнитными и электрическими эффектами. Все эти эффекты подпадают под эгиду электромагнетизма, изучающего электрические и магнитные явления. Мы видели, что электрические заряды создают электрические поля, а движущиеся электрические заряды создают магнитные поля. Магнитный диполь создает магнитное поле, и, как мы увидим в следующем разделе, движущиеся магнитные диполи создают электрическое поле.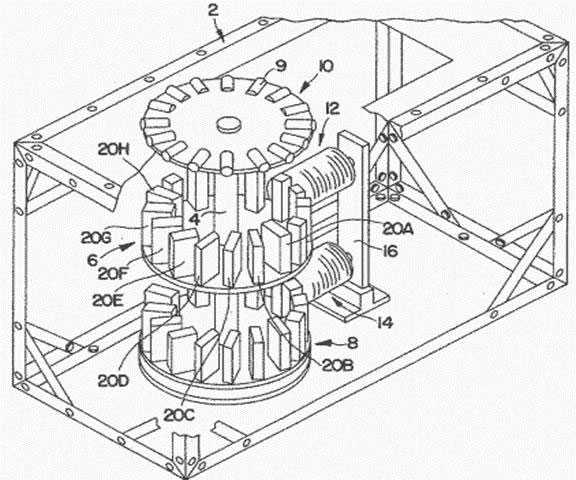 Таким образом, электричество и магнетизм — два тесно связанных и симметричных явления.
Таким образом, электричество и магнетизм — два тесно связанных и симметричных явления.
Рабочий пример
Траектория электрона в магнитном поле
Протон входит в область постоянного магнитного поля, как показано на рис. 20.20. Магнитное поле выходит из страницы. Если электрон движется со скоростью 3,0×106 м/с3,0×106 м/с, а напряженность магнитного поля составляет 2,0 Тл, какова величина и направление силы, действующей на протон?
Рисунок
20.20
Протон попадает в область однородного магнитного поля. Магнитное поле выходит из страницы — круги с точками представляют векторные стрелки, выходящие из страницы.
Стратегия
Используйте уравнение F=qvBsinθF=qvBsinθ, чтобы найти величину силы, действующей на протон. Угол между векторами магнитного поля и вектором скорости протона равен 90°.90°. Направление силы можно найти по правилу правой руки.
Решение
Заряд протона q=1,60×10-19Cq=1,60×10-19C .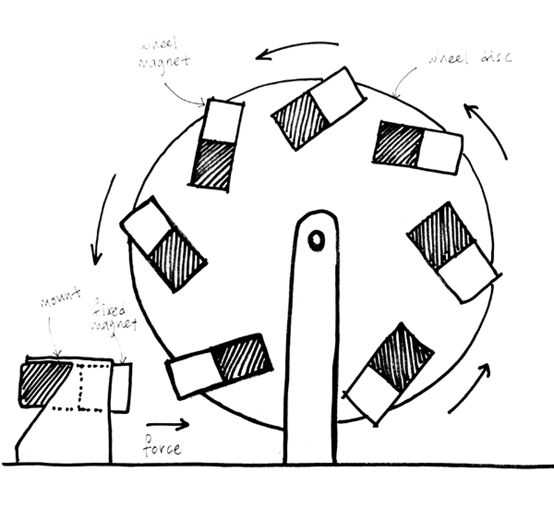 , как показано на рис. 20.21. 9.
, как показано на рис. 20.21. 9.
Обсуждение
Это кажется очень маленькой силой. Однако масса протона составляет 1,67×10-27 кг1,67×10-27 кг, поэтому его ускорение равно ×10−13N1,67×10−27 кг=5,7×1014 м/с2, или примерно в десять тысяч миллиардов раз больше ускорения свободного падения!
Мы обнаружили, что начальное ускорение протона при входе в магнитное поле направлено вниз в плоскости страницы. Обратите внимание, что по мере ускорения протона его скорость остается перпендикулярной магнитному полю, поэтому величина силы не меняется. Кроме того, по правилу правой руки направление силы остается перпендикулярным скорости. Эта сила есть не что иное, как центростремительная сила: она имеет постоянную величину и всегда перпендикулярна скорости. Таким образом, величина скорости не меняется, и протон совершает круговое движение. Радиус этой окружности можно найти, используя кинематическое соотношение.
F=ma=mv2ra=v2rr=v2a=(3,0×106 м/с)25,7×1014 м/с2=1,6 смF=ma=mv2ra=v2rr=v2a=(3,0×106 м/с)25,7×1014 м/с2 =1,6 см
20,8
Путь протона в магнитном поле показан на рис.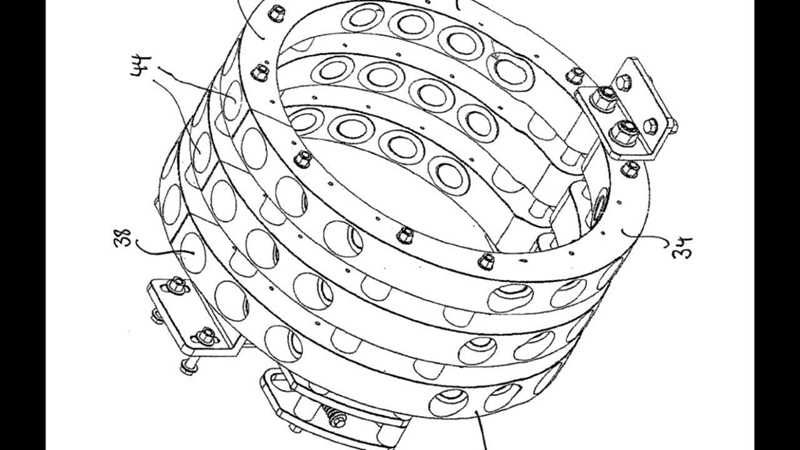 , а длина области с магнитным полем 4,0 см, какова сила, действующая на провод?
, а длина области с магнитным полем 4,0 см, какова сила, действующая на провод?
Стратегия
Используйте уравнение F=IℓBsinθF=IℓBsinθ, чтобы найти величину силы, действующей на провод. Длина провода внутри магнитного поля составляет 4,0 см, а угол между направлением тока и направлением магнитного поля составляет 90°. Чтобы найти направление силы, используйте правило правой руки, как описано сразу после уравнения F=IℓBsinθ.F=IℓBsinθ.
Решение
Вставьте данные значения в уравнение F=IℓBsinθF=IℓBsinθ, чтобы найти величину силы
F=IℓBsinθ=(1,5A)(0,040м)(2,0Т)=0,12N.F=IℓBsinθ=(1,5А)(0,040м)(2,0Т)=0,12Н.
20,9
Чтобы найти направление силы, начните с размещения вектора тока встык с вектором магнитного поля. Результат показан на рисунке в предыдущем рабочем примере с заменой v→v→ на I→I→. Согните пальцы правой руки от I→I→ к B→B→, а большой палец правой руки указывает вниз по странице, как показано на рисунке в предыдущем рабочем примере. . 9-направление. Сила, действующая на провод с током в магнитном поле, является основой всех электрических двигателей, как мы увидим в следующих разделах.
. 9-направление. Сила, действующая на провод с током в магнитном поле, является основой всех электрических двигателей, как мы увидим в следующих разделах.
Практические задачи
1.
Какова величина силы, действующей на электрон, движущийся со скоростью 1,0 × 106 м/с перпендикулярно магнитному полю напряженностью 1,0 Тл?
- 0,8 × 10 –13 N
- 1,6 × 10 –14 Н
- 0,8 × 10 –14 Н
- 1,6 × 10 –13 Н
2.
Прямой провод длиной 10 см несет ток 0,40 А и ориентирован перпендикулярно магнитному полю. Если сила, действующая на провод, равна 0,022 Н, какова величина магнитного поля?
- 1,10 × 10 –2 Т
- 0,55 × 10 –2 Т
- 1,10 Т
- 0,55 Т
Проверьте свое понимание
3.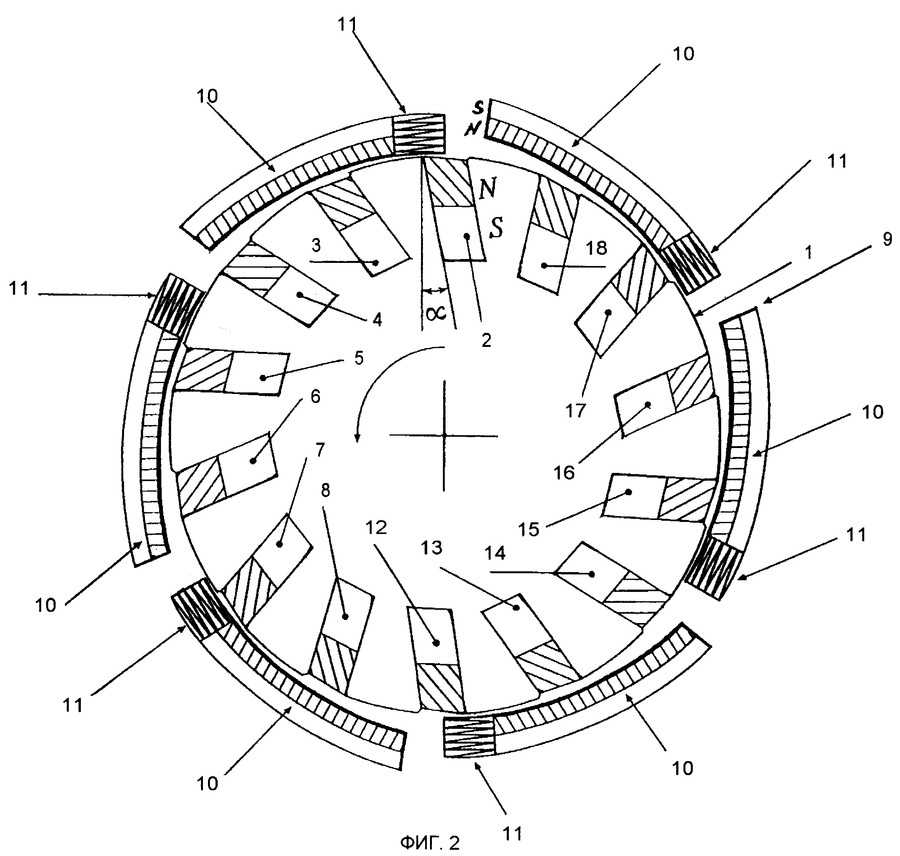
Если два магнита отталкивают друг друга, какой вывод можно сделать об их взаимной ориентации?
Либо южный полюс магнита 1 ближе к северному полюсу магнита 2, либо северный полюс магнита 1 ближе к южному полюсу магнита 2.
Либо южные полюса магнита 1 и магнита 2 ближе друг к другу, либо северные полюса магнита 1 и магнита 2 ближе друг к другу.
Недостаточно информации, чтобы сделать вывод об ориентации магнитов.
4.
Описать методы размагничивания ферромагнетика.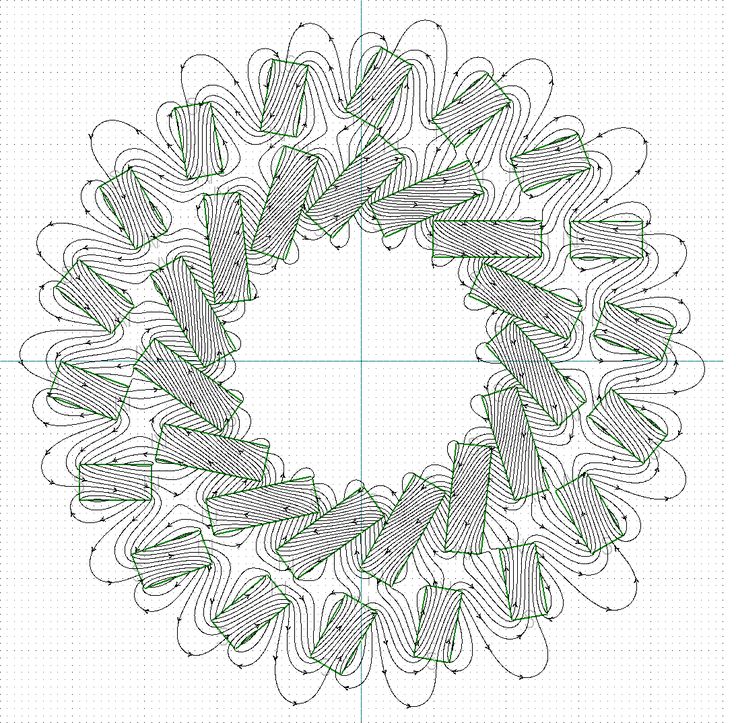
- охлаждением, нагреванием или погружением в воду
- нагреванием, ковкой и вращением во внешнем магнитном поле
- ударом молотка, нагреванием и протиранием тканью
- охлаждением, погружением в воду или протиранием тканью
5.
Что такое магнитное поле?
Направленные линии внутри и снаружи магнитного материала, которые указывают величину и направление магнитной силы.
Направленные линии внутри и снаружи магнитного материала, указывающие на величину магнитной силы.
Направленные линии внутри магнитного материала, которые указывают величину и направление магнитной силы.
Направленные линии снаружи магнитного материала, которые указывают величину и направление магнитной силы.
6.
Какой из следующих рисунков правильный?
IPM против электродвигателей SPM
Электродвигателей PM
IPM против SPM
Какие преимущества вы можете получить, используя эти типы двигателей?
Двигатель с постоянными магнитами (ПМ) — это двигатель переменного тока, в котором используются магниты, встроенные или прикрепленные к поверхности ротора двигателя.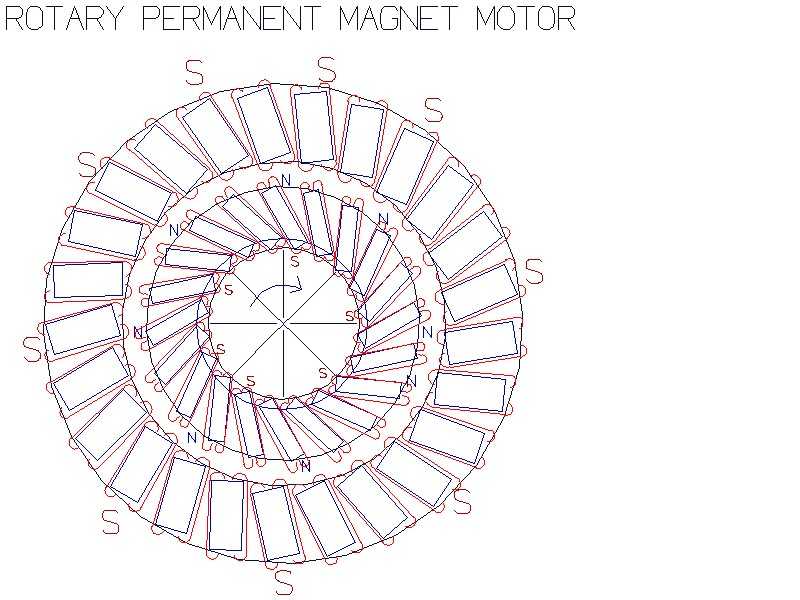 Эта статья дает базовое понимание терминологии, концепций, теории и физики двигателей с постоянными магнитами.
Эта статья дает базовое понимание терминологии, концепций, теории и физики двигателей с постоянными магнитами.
Все дело в супермагнитах
Используемые магниты – это неодимовые и железо-борные магниты, также называемые супермагнитами. Это название связано с чрезвычайной концентрацией магнитного поля на см2, что делает их очень привлекательными, несмотря на их небольшой размер, их высокая плотность магнитного поля способствует прочности и эффективности.
Учитывая характеристики двигателей с постоянными магнитами и высокую плотность магнитного поля, которые позволяют спроектировать двигатель в треть размера двигателя с той же производительностью. Кроме того, высокий КПД позволяет с минимальным потреблением электроэнергии запускать электромобили. И последнее, но не менее важное: срок службы супермагнитов составляет около 400 лет. Гарантия их эффективности и надежности с течением времени.
SPM
поверхностный постоянный магнит
Тип двигателя, в котором постоянные магниты прикреплены к окружности ротора.
IPM
внутренний постоянный магнит
Тип двигателя, ротор которого оснащен постоянными магнитами, называется IPM.
Изображение предоставлено KEB AG
Возможно, самым большим преимуществом конструкций IPM, которое дает им преимущество в транспортных средствах, таких как тяговые двигатели, является высокая скорость работы. Кривая зависимости мощности от скорости для двигателей SPM является примерно гиперболической, поднимаясь до области квазипостоянной мощности в узком диапазоне скоростей, а затем падая.
От SPM к IPM
На протяжении десятилетий двигатели с поверхностными постоянными магнитами (SPM) доминировали на рынке двигателей с постоянными магнитами. Однако в последние годы развивающийся рынок гибридных и электрических транспортных средств повысил спрос на внутренние двигатели с постоянными магнитами (IPM). Обладая такими преимуществами, как почти постоянная мощность в широком диапазоне скоростей и конструкция с удерживанием магнита, двигатели IPM представляют собой хорошее решение для таких приложений, как тяговые и вспомогательные двигатели.
Для транспортных средств технология IPM обеспечивает большие преимущества по сравнению с двигателями SPM. Конфигурация IPM позволяет лучше контролировать намагниченность магнитопровода.
Двигатели
IPM, напротив, обеспечивают гораздо более широкий диапазон более или менее постоянного крутящего момента. Используя технику, называемую ослаблением поля, разработчики могут подавать ток для изменения характеристик. Ослабление поля по существу включает в себя настройку магнитного поля статора, чтобы частично противодействовать эффекту постоянных магнитов.
Сравнительные таблицы
SPM
ПОВЕРХНОСТНЫЙ ПОСТОЯННЫЙ МАГНИТ
Двигатели SPM имеют магниты, прикрепленные к внешней поверхности ротора, поэтому их механическая прочность слабее, чем у двигателей IPM. Ослабленная механическая прочность ограничивает максимальную безопасную механическую скорость двигателя. Кроме того, эти двигатели имеют очень ограниченную магнитную заметность (Ld ≈ Lq). Значения индуктивности, измеренные на выводах ротора, постоянны независимо от положения ротора. Из-за отношения заметности, близкого к единице, конструкции двигателей SPM в значительной степени, если не полностью, зависят от магнитной составляющей крутящего момента для создания крутящего момента.
Значения индуктивности, измеренные на выводах ротора, постоянны независимо от положения ротора. Из-за отношения заметности, близкого к единице, конструкции двигателей SPM в значительной степени, если не полностью, зависят от магнитной составляющей крутящего момента для создания крутящего момента.
IPM
ВНУТРЕННИЙ ПОСТОЯННЫЙ МАГНИТ
В двигателях IPM постоянный магнит встроен в сам ротор. В отличие от их аналогов SPM, расположение постоянных магнитов делает двигатели IPM очень надежными с механической точки зрения и подходящими для работы на очень высоких скоростях. Эти двигатели также отличаются относительно высоким коэффициентом значимости магнитного поля (Lq > Ld). Из-за своей магнитной заметности двигатель IPM может генерировать крутящий момент, используя преимущества как магнитной, так и реактивной составляющих крутящего момента двигателя, что делает их адаптированными к различным электромобилям.
Почему следует выбирать двигатель IPM вместо SPM?
Для высокоскоростных применений, таких как тяговые двигатели, лучшим выбором является двигатель IPM.