Содержание
Как сделать левитирующий двигатель
У тихоокеанских островитян есть религия самолетопоклонников. Во время войны они видели, как приземляются самолеты, полные всяких хороших вещей, и они хотят, чтобы так было и теперь. Поэтому они устроили что то вроде взлетно посадочных полос, по сторонам их разложили костры, построили деревянную хижину, в которой сидит человек с деревяшками в форме наушников на голове и бамбуковыми палочками, торчащими как антенны — он диспетчер, — и они ждут, когда прилетят самолеты. Они делают все правильно.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Вечный двигатель: Мендосинский мотор, модели и их описание
- Ховерборд своими руками: строим макет левитирующей доски
- Мотор Мендосино.
Играем в магнитики.
- Анатолий Зайцев: левитирующий транспорт может заменить даже метро
- Мендосинский мотор
- Мотор Мендосино. Играем в магнитики.
- Как сделать левитрон своими руками
- Мендосинский мотор
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Как сделать солнечный Мендосинский мотор
Вечный двигатель: Мендосинский мотор, модели и их описание
Вот только сегодня утром на работе думал пройти 1ую часть , пришёл с работы , зашёл на пикабу и на те вам. Ну как не может, вату же двигает, фольгу! Да им много чего двигать можно, фантики от конфет пудово должен. Ротор будет вырывать при перемене нагрузки. Так что придется создавать для оси дополнительную опору подшипниками.
Ротор будет вырывать при перемене нагрузки. Так что придется создавать для оси дополнительную опору подшипниками.
А чтоб еще увеличить мощность, придется фотоэлементы заменить на подачу напряжения. Так что сложно и бесполезно. Подключить солнечные панели напрямую, вот как. Не будет лишней растраты энергии на преобразованиях и на трение с воздухом. Еще будут одновременно 4 панели использоваться, а не полторы. Изобрести генератор, который будет вырабатывать ток при перемешении в нем ваты.
Трение о воздух тоже ничтожно. К тому моменту, когда на нем станут заметны эррозионные процессы, ось уже протрет фторопласт, выточит дыру в стекле и там застрянет. Трение о воздух нифига не ничтожно. Погуглите волчки в обычной среде и в вакууме.
Совершенно по-разному себя ведут. Это на фоне современных ютубных бубнильщиков и гундосильщиков так. Обычный хороший голос, но не дикторский.
Мне кажется, тут таже тема, что и с двигателями. В определенный момент, нужно чтобы ток тек именно в том направлении, в котором нужно и чтобы магнитное поле было именно таким, каким оно получалось бы с определенной полярностью. Или я не прав? Всё верно, если и ставить зеркало , то нужно направить его так, чтобы оно свет направляло на верхнюю часть ротора.
Или я не прав? Всё верно, если и ставить зеркало , то нужно направить его так, чтобы оно свет направляло на верхнюю часть ротора.
Вообще такое зеркало поможет запускать такой двигатель при более слабом освещении. Такая моща будет! Слушай чувак, а я тут подумал ты вроде что-то понимаешь в физике или это что-то другое , вот у фотонов есть своя скорость, точно не помню какая вообщем скорость света, но когда фотон бьется о поверхность то он теряет скорость.
Это как сработает или нет? Я не спал сутки и залился большим объемом кофе, заранее извиняюсь за упоротый и возможно глупый вопрос. Фотон же не теряет скорость после отражения. Фотон может изменить скорость только при переходе из одной среды в другую. Давно мучает вопрос, а почему подшипники не делают на воздушно-магнитной подушке чтобы ликвидировать трение?
У него лампочка на Вт!! Перед нами преступник дамы и господа! Срочно пишем коллективное заявление в полицию! У меня в городе в одном из строительный магазинов их продают и на Вт и на Под видом тепловыделяющих элементов. И не подкопаешься! Можно ли замерять прецессию этой штуки во времени? Предлагаю установить на пенопласт в емкости с водой и дать покрутиться часа 3.
И не подкопаешься! Можно ли замерять прецессию этой штуки во времени? Предлагаю установить на пенопласт в емкости с водой и дать покрутиться часа 3.
На сколько точно сориентируется по меридиану? Ребята, а нет ни у кого подробной инструкции как подобный собрать двигатель, или раскидайте сами, как катушку с фотоэлементами собрать правильно, с магнитами то я въехал главное их разместить правильно, а вот изготовление катушки и как присобачить к ней фотоэлементы вызывает определённую трудность, будучи не физиком и далёким от всех работ с электроникой поясните на пальцах если не в ломы, где можно купить куда наматать, к чему припаять и чтоб тадааа и всё работало.
У меня была другая идея перпетум мобиле, но поскольку я не физик, и руки не из плеч, реализовать эту идею нет возможности. Если закрепить на пятку опоры и кончик штыря еще пару отталкивающихся магнитов, то ротор совсем не будет иметь контакта с опорой. Да конечно Странно, что никто не догадался. Хотя может дело в том, что не очень просто будет уравновесить систему только в магнитном поле? Интересно, а если между панелями натыкать мелких светодиодов, часы могут получиться?
Вечный двигатель — не то что вечно крутится, а то что выдаёт энергию не забирая её. Тут просто двигатель который крутится от солнечной батареи. Это НЕ генератор, он не вырабатывает ток а потребляет его. Желательно водонепроницаемого. Приделать с помощью ремней или шестерен, или еще каким-либо возможным способом генератор. И вот источник энергии в походе». Отковырять солнечные панели, поместить на одну плоскость, а дальше хоть в водонепроницаемый чехол его суй. Получишь бесполезный в походе генератор, потому что энергии там кот наплакал.
Тут просто двигатель который крутится от солнечной батареи. Это НЕ генератор, он не вырабатывает ток а потребляет его. Желательно водонепроницаемого. Приделать с помощью ремней или шестерен, или еще каким-либо возможным способом генератор. И вот источник энергии в походе». Отковырять солнечные панели, поместить на одну плоскость, а дальше хоть в водонепроницаемый чехол его суй. Получишь бесполезный в походе генератор, потому что энергии там кот наплакал.
Если погрузить левитирующие магниты в магнитную яму — все будет висеть в воздухе без всяких точек опор. Например, летающий волчок можно легко загуглить. Он висит в воздухе пока вращается, однако само вращение требуется, чтобы волчок просто другим полюсом не повернулся. Однако, если мы берем систему с несколькими магнитными «опорами» — то вращение не требуется. А мог тупо и не делать. Делать магнитную яму сложнее, нежели на двусторонний скотч магниты нацепить. Что ты видишь?
Тут генератор — это солнечная панель, и подключить ее напрямую будет куда эффективнее. В ветряках же, генератор — ветер, который вращает лопасти, которые передают вращающий момент на ротор. Суём этот генератор в вакуум, смазываем, делаем так, чтобы свет попадал с той стороны, где нужно, через муфту вал подключаем к редуктору? Чтобы избежать потерь на раскручивание, можно сделать коробку передач, когда при достижении определённой скорости подключается следующее звено редукторов.
В ветряках же, генератор — ветер, который вращает лопасти, которые передают вращающий момент на ротор. Суём этот генератор в вакуум, смазываем, делаем так, чтобы свет попадал с той стороны, где нужно, через муфту вал подключаем к редуктору? Чтобы избежать потерь на раскручивание, можно сделать коробку передач, когда при достижении определённой скорости подключается следующее звено редукторов.
И вауаля! Конечный оборот у нас уже не в минуту, а, скажем, !!! А потом к этому генератору другой двигатель, подключённый по схеме выше, и так до бесконечности. И вообще, таким образом, развиваем скорость света!!! Масса тела от скорости не зависит, эту формулу лучше забудьте, а книги по физике, в которых сказано, что масса тела меняется со скоростью — в мусор. Не забывай что редуктор прибавляя скорость пропорционально уменьшает силу. В конце концов мотор просто не сможет провернуть редуктор не хватит силы.
Генератор при подключении нагрузки будет вырабатывать тормозящий электромагнитный момент, что уже начинает тормозит первую систему. Ты серьёзно что ли???? Вы вообще гуманитарии тут все что ли? По-твоему, направление света изменяет направление вращения? Этот свет что, по-твоему, подобен ветру и «дует» на солнечные панели? Чтоб ты знал, «Плюс и минус» у солнечной панельки неизменны, с какой стороны ни свети! Нет, не потому, а потому что принципиальная схема фени из видео подразумевает подключения фотоэлементов к катушке противоположными контактами, дабы в аналогичных положениях, относительно источника света в катушке возникал ток одинаковой направленности не несмотря на поворот в градусов.
Ты серьёзно что ли???? Вы вообще гуманитарии тут все что ли? По-твоему, направление света изменяет направление вращения? Этот свет что, по-твоему, подобен ветру и «дует» на солнечные панели? Чтоб ты знал, «Плюс и минус» у солнечной панельки неизменны, с какой стороны ни свети! Нет, не потому, а потому что принципиальная схема фени из видео подразумевает подключения фотоэлементов к катушке противоположными контактами, дабы в аналогичных положениях, относительно источника света в катушке возникал ток одинаковой направленности не несмотря на поворот в градусов.
Иными словами при освещении двух противоположно расположенных фотоэлементов одновременно токи в них будут противоположнонаправленны и скомпенсируются правило Кирхгофа, мать его что сведет намагничивание котушки на нет и никакого вращательного момента не будет.
Так что да, свет с двух сторон не даст вращаться. И аналогия с ветром в конкретном данном случае в принципе уместна. Если он в видео подключен так, что «в катушке возникал ток одинаковой направленности», то от переноса источникасвета или добавления второго никакой другой направленности тока не возникнет.
Я понял. Объясняю проще. Устройство в видео состоит из двух катушек и четырех фотоэлементов. По два фотоэлемента на катушку. Рассмотрим набор из катушки и её двух фотоэлементов. Прошу посмотреть на криво нарисованные иллюстрации чуть ниже.
Очевидно же, в каком направлении действует вращающая сила? Провернем конструкцию на пол оборота, чтобы убедиться в том, что она корректно работает. Все ок, активный фотоэлемент крутит в нужном направлении.
А в какую же сторону оно будет крутить сейчас? Ток-то нулевой суммарный. Да иди ты в пень. И думай сначала, а потом пиши про ЕГЭ. А ещё, ради приличия, посмотри видео в посте, даже он объясняет почему если свет будет с двух сторон — вращаться не будет, слушай про переполюсовку.
Направления света тут вообще нет. Если свет будет светить с двух сторон, две противоположные световые панели будут активны — система будет равносильна цепи с двумя источниками одинакового ЭДС и разного направления тока, без. Минусую как быдло и гуманитарий с высшим образованием энергетика.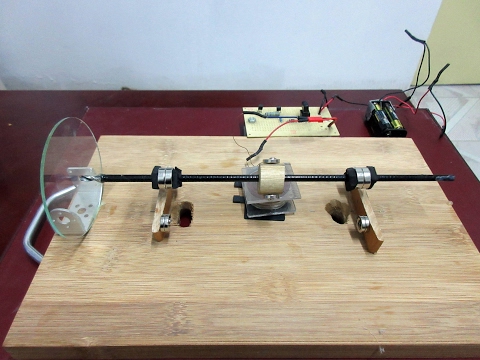
Ховерборд своими руками: строим макет левитирующей доски
Сейчас пока над этим не думаю, не до того, но как увижу любую инфу по вопросу, все равно всегда изучаю. Я думаю разгадка в магнитах. И раньше так думал, и сейчас. Левитирующие диски Шарля. Менее трагично, но не менее драматично сложилась жизнь у Джона Шарля — человека, открывшего эффект, названный его именем, и построивший модели летающих тарелок, названных левитирующими дисками Шарля.
Чувак, левитирующий — это подвешенный в гравитационном поле антигравитацией. А это настольный магнитный подвес в домашнем.
Мотор Мендосино. Играем в магнитики.
Мендосинский бесколлекторный магнитно-левитационный солнечный мотор Ларри Спринга , или мендосинский мотор англ. Мотор состоит из ротора многоугольного обычно квадратного сечения, насаженного на вал. Ротор имеет два набора обмоток с питанием от солнечных батарей. Вал расположен горизонтально, на каждом его конце находится постоянный кольцевой магнит. Магниты на валу обеспечивают левитацию , так как находятся над отталкивающими магнитами, расположенными в основании. Дополнительный магнит, находящийся под ротором, создаёт магнитное поле для обмоток ротора. Когда свет падает на одну из солнечных батарей, она генерирует электрический ток, который течёт по обмотке ротора. Этот ток производит магнитное поле, которое взаимодействует с полем магнита под ротором. Это взаимодействие приводит ротор во вращение.
Дополнительный магнит, находящийся под ротором, создаёт магнитное поле для обмоток ротора. Когда свет падает на одну из солнечных батарей, она генерирует электрический ток, который течёт по обмотке ротора. Этот ток производит магнитное поле, которое взаимодействует с полем магнита под ротором. Это взаимодействие приводит ротор во вращение.
Анатолий Зайцев: левитирующий транспорт может заменить даже метро
Левитирующий двигатель мендосинский мотор , который вы можете купить в нашем магазине. Представляет из себя экзотическую модель электродвигателя. Ротор состоит из четырёх солнечных панелей и двух независимых обмоток насаженных на вал. Сам ротор левитирует в воздухе на магнитной подушке.
Все остальное, даже скоростная железная дорога, считается сдерживающим фактором.
Мендосинский мотор
Регистрация и вход. Поиск по картине Поиск изображения по сайту Указать ссылку. Загрузить файл. Крутой поиск баянов. Везде Темы Комментарии Видео. О сайте Активные темы Помощь Правила Реклама.
Мотор Мендосино. Играем в магнитики.
Сайт помогает найти что-нибудь интересное в огромном ассортименте магазинов и сделать удачную покупку. Если Вы купили что-то полезное, то, пожалуйста, поделитесь информацией с другими. Также у нас есть DIY сообщество , где приветствуются обзоры вещей, сделанных своими руками. Установка её в Москвич. Своими руками. Последний раз. Зарегистрироваться Логин или эл.
Кристаллом мною назван левитирующий неодимовый магнит – он обклеен Однако существует возможность сделать левитацию реальной, Катушки электромагнитов использованы с двигателя ведущего вала.
Как сделать левитрон своими руками
Игорь, надо конструкцию просто перевернуть. Так как это у обычного волчка. Нижняя часть должна упираться в кольцевой магнит, а верхняя висеть над ней. Сила гравитации тогда сама будет выравнивать направление вращения оси.
Мендосинский мотор
Радиоконструктор «Солнечный мотор » — это очень интересный и разносторонний набор. В нем содержатся детали для сборки модели «Солнечный привод», «Мендосинский двигатель», «Левитирующий якорь», в комплекте: солнечные батареи, провод, неодимовые магниты, корпус, ось, подробная инструкция. С помощью набора можно собрать модель устройства, работающих от солнечной батареи. Параметры: Габариты упаковки: глубина упаковки: 3 см; ширина упаковки: 15 см; высота упаковки: 10 см Назначение: опыты, развитие Сезон: круглогодичный Производство: Микроконт. Страна производитель: Россия Комплектация: набор конструктор.
С помощью набора можно собрать модель устройства, работающих от солнечной батареи. Параметры: Габариты упаковки: глубина упаковки: 3 см; ширина упаковки: 15 см; высота упаковки: 10 см Назначение: опыты, развитие Сезон: круглогодичный Производство: Микроконт. Страна производитель: Россия Комплектация: набор конструктор.
Комментарий: От пользователя: URL:.
Противоположные фотоэлементы соединяются встречно-параллельно минусы с плюсами и к каждой паре параллельно подпаяна своя катушка вит. Перед намоткой необходимо приклеить все фотоэлементы, с заранее припаянными тонкими проволочками от монтажного провода , продетыми сквозь проткнутые иглой боковые картонки наружу. В каждой боковушке 2 отверстия и из каждого из них будет выходить пара скрученных и укороченных до мм отрезков. К ним после намотки подпаиваются выводы катушек. Я всё соединял внутри, но это сложнее.. Если после сборки не крутится, а раскачивается — поменяйте местами выводы одной из катушек.
Мендосинский мотор.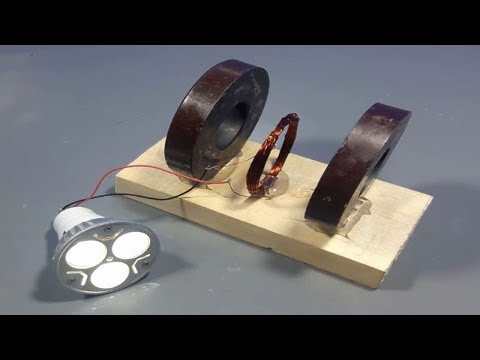 Изготовление во всех подробностях Дмитрий Коржевский. Как сделать солнечный Мендосинский мотор How-todo.
Изготовление во всех подробностях Дмитрий Коржевский. Как сделать солнечный Мендосинский мотор How-todo.
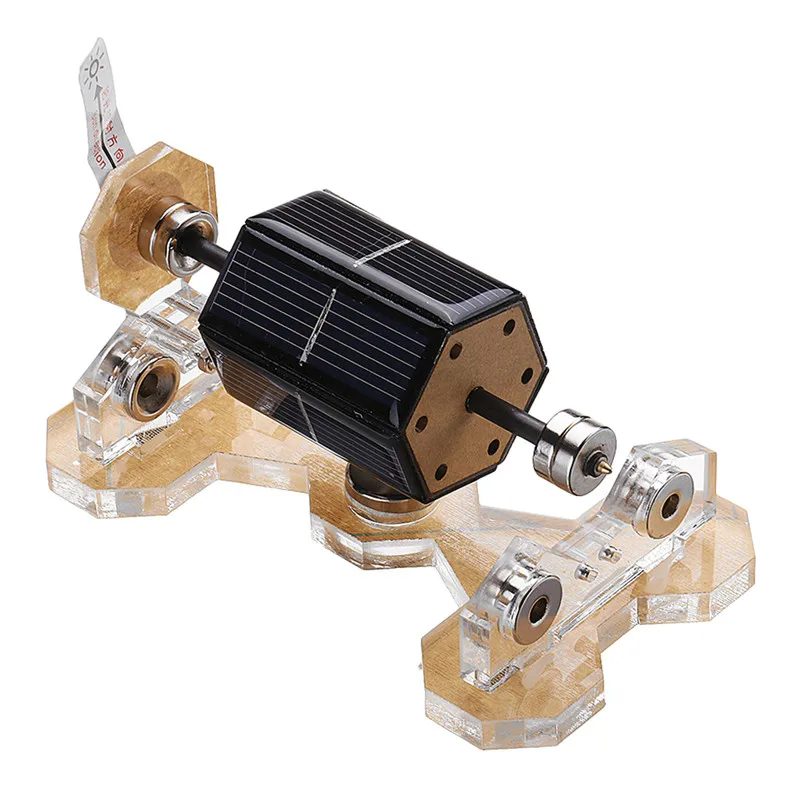
Магнито-солнечный двигатель с левитирующим ротором (Мендосинский мотор)
Здравствуйте друзья. Сегодня я хочу рассказать о наборе для самостоятельной сборки забавного «вечного двигателя», коим является Мендосинский мотор. Конечно это не вечный двигатель и не Бестопливный генератор энергии (БТГ). На самом деле энергия для вращения ротора вырабатывается солнечными элементами, установленными непосредственно на ротор двигателя. Также, «левитирующий ротор» всего навсего имеет магнитный подвес, но смотрится эффектно.
Двигатель из набора собирается достаточно легко, однако есть нюансы…
История создания и описание (взято из Wiki):
Мендосинский мотор был изобретён в 1994 году американским конструктором и популяризатором науки Ларри Спрингом. Назван по имени округа Мендосино в штате Калифорния, где проживает изобретатель.
Мотор состоит из ротора многоугольного (обычно квадратного) сечения, насаженного на вал. Ротор имеет два набора обмоток с питанием от солнечных батарей. Вал расположен горизонтально, вблизи его концов находятся два постоянных кольцевых магнита. Магниты на валу обеспечивают левитацию, так как находятся над отталкивающими постоянными магнитами, расположенными в основании. Дополнительный магнит, находящийся под ротором, создаёт магнитное поле, которое взаимодействуя с током в обмотках ротора создаёт крутящий момент.
Освещение подаётся с одной из сторон. Когда свет падает на одну из солнечных батарей, она генерирует электрический ток, который течёт по обмотке ротора. Этот ток производит магнитное поле, которое взаимодействует с полем магнита под ротором. Это взаимодействие приводит ротор во вращение. При повороте ротора следующая солнечная батарея обращается к источнику света и возбуждает ток в следующей обмотке. Процесс повторяется до тех пор, пока на батареи падает свет. Можно провести аналогию с работой коллекторного двигателя постоянного тока: вместо щёточного электрического коллектора в данном двигателе используется «световой коллектор».
Поскольку невозможно сделать статическую устойчивую магнитную подвеску на постоянных магнитах, с одной или двух сторон ось опирается на стенку. Магнитная подвеска очень неустойчива, и важно хорошо сбалансировать ротор.
Состав набора:
Помимо присутствующего на фото, в комплекте было следующее:
— полоска медной фольги с клеевой стороной;
— отрезок медного провода в лаковой изоляции;
— маленький ключ «шестигранник»;
— пропеллер;
— 3 металлических шарика;
— 1 металлический циллиндрик;
— 2 латунные фигурные шайбы;
— стикер со ссылкой на инструкцию (http://handsmagic.cc/solar-motor-type2/).
Сборка:
1. Установка упора
2. Приклеивание магнитов Т.к. клея в комплекте не было использовал сначала клей ПВА, сохнет долго, адгезия к магнитам очень слабая, магниты выскакивают, сцепляются между собой, разрушаются от соударений. ПВА не подходит.
Пробовал термоклей из термопистолета, в принципе вариант приемлемый, клеится быстро, адгезия к дереву отличная, к магнитам слабовата, но есть.
Лучший вариант — клей Момент. Из минусов — долго сохнет.
Важное замечание: магниты необходимо ориентировать все в одном направлении. Большой магнит на дне подставки клеится в любой ориентации.
3. Пайка Для начала необходимо из комплектного куска медного провода в лаковой изоляции нарезать 4 одинаковых отрезка. Далее необходимо все концы проводов, как этих отрезков, так и обмоток, залудить. Я для этого использую таблетку аспирина. Единственный минус — уж очень едкий запах. Соединить солнечные элементы с обмотками ротора необходимо по следующей схеме:
4. Дальше, с помощью отрезков 2-х стороннего скотча необходимо закрепить солнечные элементы на ротор таким образом, чтобы элементы одной обмотки располагались на противоположных поверхностях.
5. С помощью комплектной медной ленты необходимо закрепить кольцевые магниты на оси ротора. Также необходимо предварительно проверить их ориентацию относительно магнитов подставки. Все магниты должны быть сориентированы в одну сторону.
Тут необходимо сделать замечание: в моем случае комплектной ленты не хватило — магниты сидели неплотно. Поэтому я счистил медную ленту и намотал обычный прозрачный скотч. Так и красивее и нет ограничения по количеству — не закончится 🙂
6. Ось ротора представляет из себя трубку с внутренним диаметром близким с диаметром комплектных шариков. Один из этих шариков необходимо вставить в тот конец трубки, который будет упираться в металлический упор.
7. Если всё сделано правильно (ошибиться сложно), то мотор должен вращаться под действием солнечного света или от лампы накаливания. Светодиодные лампы не обеспечивают необходимого уровня потока лучистой энергии. Если вращения нет, то в инструкции есть указание на смену мест установки солнечных элементов одной (любой) из обмоток. Т.е. нужно взять любые 2 противоположные панельки и поменять их местами (просто переклеить не перепаивая). Не знаю для чего это нужно, в этом вижу смысл, если у нас не 2 обмотки, а больше. В нашем случае работать должно в любом состоянии. Лично я не заметил разницы.
Лично я не заметил разницы.
Итак, если вращение есть, то запоминаем местоположение каждого солнечного элемента, убираем 2-х сторонний скотч, надеваем на ось с обоих концов прозрачные шестигранные ограничители и к ним приклеиваем панели. Я использовал цианокрилатный клей. А на противоположный конец от шарика оси надеваем пропеллер
8. Также необходимо не забыть приклеить ножки на нижнюю часть деревянной подставки
Испытания:
Аккуратно устанавливаем ротор на своё место, желательно под прямыми солнечными лучами. Если ротор сам не начинает крутиться, то слегка помогаем пальцем.
В комплекте имеются шарики и циллиндрик. При большом биении ротора можно с помощью этих шариков попытаться уравновесить его, в моем случае этого не понадобилось.
Еще несколько фото работающего мотора:Прошу обратить внимание на изменяющиеся геометрические размеры ротора и пропеллера, выглядит забавно 🙂
Видеоверсия:
На выбор 2 ролика: 1 — короткий с музыкой, 2 — длинный с пояснениями
 youtube.com/embed/_wequ8-7IlU?autoplay=0&hl=ru_RU&rel=0″ frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/_wequ8-7IlU?autoplay=0&hl=ru_RU&rel=0″ frameborder=»0″ allowfullscreen=»»>
Заключение:
Двигатель работает. Процесс сборки не занимает много времени, но требует аккуратности.
Из минусов: цена. На мой взгляд стоимость набора завышена как минимум в 2 раза. Но это самый дешевый вариант, который я нашел на Али.
Однако я уже купил и магниты и солнечные модули, хочу попробовать сделать нечто подобное с помощью 3D принтера. Если получится, сделаю подробный обзор с предоставлением моделей и ссылок на запчасти.
Всем добра! Да прибудет с нами сила Солнечной энергии!!!
все необходимое для успешной сборки двигателя
Дата публикации: 6 сентября 2019
Содержание
- Собираем мотор Мендосино своими руками: детальное рассмотрение конструкции
- Материалы, необходимые для сборки двигателя Мендосино своими руками
- Мендосинский мотор своими руками: изготовление во всех подробностях
В 1994 году все жители округа Мендосино на калифорнийском побережье наперебой обсуждали изобретение местного умельца Ларри Спринга. Небольшой мотор, подвешенный в воздухе, удивительным образом вращался сам собой и не требовал подключения к сети. Стоя на подоконнике небольшого магазинчика, загадочный движок неизменно становился предметом пристального внимания детей и взрослых. Попытки разгадать тайну мастера не увенчались успехом, пока сам Ларри не признался самым настойчивым посетителям, какой секрет он положил в основу своего изобретения.
Небольшой мотор, подвешенный в воздухе, удивительным образом вращался сам собой и не требовал подключения к сети. Стоя на подоконнике небольшого магазинчика, загадочный движок неизменно становился предметом пристального внимания детей и взрослых. Попытки разгадать тайну мастера не увенчались успехом, пока сам Ларри не признался самым настойчивым посетителям, какой секрет он положил в основу своего изобретения.
Все оказалось очень просто. Умение подогнать законы физики друг под друга и немного смекалки позволили Спрингу сконструировать небольшой двигатель, основными элементами которого являются ротор и статор – все, как у «настоящих» моторов. Однако здесь и кроется основной секрет. В роли статора используется подставка с постоянным магнитом и магнитной опорой. А роль ротора выполняет диэлектрический каркас с комплектом солнечных батарей, смонтированных поверх вращающихся катушек.
Принцип работы двигателя основан на вращении ротора под воздействием магнитных полей, возникающих за счет прохождения электрического тока по катушкам устройства. Необходимый заряд поступает на мотор благодаря работе солнечных панелей. Получая питание по очереди, катушки за счет силы Ампера «выталкиваются» со стороны возникающего магнитного поля. Но, поскольку они зафиксированы на магнитных опорах, запускается процесс вращения. Именно так действует любой магнитно-левитационный мотор небольшой мощности, к которым относится двигатель Мендосино.
Необходимый заряд поступает на мотор благодаря работе солнечных панелей. Получая питание по очереди, катушки за счет силы Ампера «выталкиваются» со стороны возникающего магнитного поля. Но, поскольку они зафиксированы на магнитных опорах, запускается процесс вращения. Именно так действует любой магнитно-левитационный мотор небольшой мощности, к которым относится двигатель Мендосино.
Собираем мотор Мендосино своими руками: детальное рассмотрение конструкции
Секрет американского изобретателя открыл возможность тысячам домашних умельцев сконструировать аналогичное устройство у себя дома, чтобы впечатлить родных и удивить любителей загадок природы. Однако прежде чем приниматься за работу, стоит рассмотреть устройство в деталях. На счету здесь каждый сантиметр – важно, чтобы все элементы находились на своем месте и взаимодействовали строго в рамках физических законов.
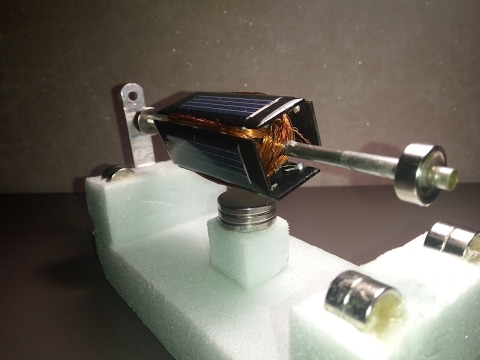
Ротор движка Мендосино имеет квадратное сечение и располагается в устройстве горизонтально. Такое решение позволяет расположить на его поверхности солнечные панели. На концах вала ротора закреплены постоянные кольцевые магниты. Благодаря созданному ими магнитному полю ротор запускается в движение, которое неспособна остановить даже сила взаимного трения металлических элементов.
На концах вала ротора закреплены постоянные кольцевые магниты. Благодаря созданному ими магнитному полю ротор запускается в движение, которое неспособна остановить даже сила взаимного трения металлических элементов.
Чтобы удержать ротор в подвешенном состоянии, магнитные кольца валов располагаются прямо над магнитными подставками. Еще один магнит под ротором необходим для создания магнитного поля статора, которое дает «старт» вращению ротора.
При попадании солнечного света на одну из солнечных панелей генерируется электрический ток. Он направляется на обмотку ротора, которая находится у магнита прямо под осью. Создается магнитное поле соответствующего полюса ротора, и последний начинает вращение, отталкиваясь от магнитного поля статора. Солнечный свет поочередно попадает на каждую из солнечных батарей по четырем сторонам оси, запуская аналогичный процесс в отношении каждой из обмоток катушек. Это обеспечивает постоянное вращение ротора в его «подвешенном» состоянии.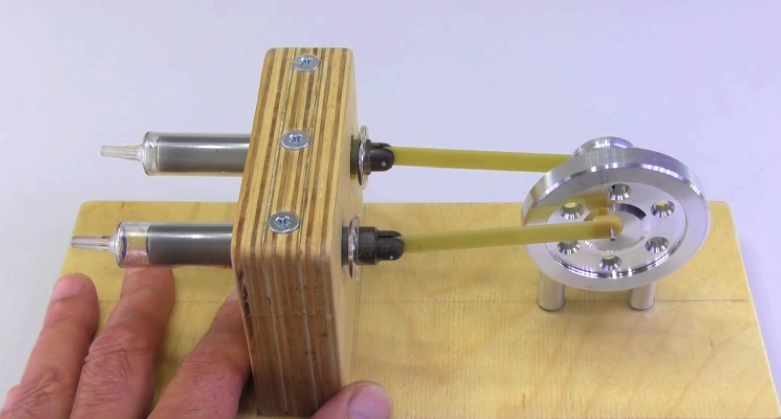 Устройство будет исправно работать при наличии интенсивного или среднего светового потока.
Устройство будет исправно работать при наличии интенсивного или среднего светового потока.
И последний секрет, о котором нужно знать перед началом изготовления и сборки мендосинского мотора по схеме. Постоянные магниты в подвеске ротора – обязательный элемент конструкции, благодаря которому удается преодолеть возникающую силу трения. В противном случае мощности движка окажется недостаточно, и вращение прекратится уже после первых оборотов.
Материалы, необходимые для сборки двигателя Мендосино своими руками
Для работы потребуется следующий набор материалов и инструментов:
- Деревянный штырь диаметром чуть более 10 мм;
- Термоклей;
- Шпон для изготовления ротора;
- Проволока для намотки катушек 0,28 мм в диаметре;
- Два кольцевых магнита типа RX088;
- Несколько реек и досок для основы и опор;
- Алюминий для стенки;
- Двенадцать магнитов типа RX033CS-N.
Выбор в пользу указанных моделей магнитов не случаен. Они протестированы на практике и лучше других подходят для мендосинского движка, гарантируя его работоспособность.
Они протестированы на практике и лучше других подходят для мендосинского движка, гарантируя его работоспособность.
Мендосинский мотор своими руками: изготовление во всех подробностях
Последовательность работы выглядит следующим образом:
- В качестве вала выбран деревянный штырь около 25 см длиной. На его концах необходимо закрепить кольцевые магниты RX088.
- Рассчитывается интервал между центрами пар рабочих магнитов. Слишком большое расстояние не удержит движок на весу, тогда как маленький промежуток приведет к нестабильности положения основного плавающего магнита. Для конструкции в рамках указанных выше параметров магниты стоит расположить на расстоянии около 75 мм между центральными точками.
- Чтобы вал не задирался вверх во время движения под действием силы вращения, дальнюю пару магнитов следует установить чуть дальше от стены относительно магнита на валу. На этом этапе сборки можно поэкспериментировать, чтобы найти оптимальную точку фиксации.
- Чтобы обеспечить стабильность вращающихся магнитов, параллельно оси укладывают два магнитных диска. Взаимодействие их магнитных полей обеспечит устойчивое положение вращающегося элемента.
- Из шпона изготавливается конструкция ротора. Отдельные элементы склеиваются с помощью термоклея.
- После того как детали подсохнут, можно приступать к намотке катушек. Десять витков делают на одной стороне вала, затем десять витков — на противоположной. Аналогичным образом наматывают витки на каждой из двух оставшихся поверхностей. Число витков в каждой катушке должно составлять около 1000. После намотки провода каждой катушки помечают, чтобы отследить направление намотки.
- Теперь необходимо подключить солнечные панели – по одной на каждую катушку.
Собранный своими руками двигатель Мендосино можно использовать как наглядную модель для демонстрации принципа действия любого мотора. Остается только выбрать для него подходящее место с учетом качества естественного освещения.
Магнитная левитация — Learn.sparkfun.com
Авторы:
Алекс Великан
Избранное
Любимый
11
Введение
Да будет свет! В этом уроке мы создадим простой магнитный левитатор. В этом руководстве будет рассмотрена часть теории, как использовать датчик магнитного поля и как использовать его для создания базовой схемы левитации. Наконец, мы пойдем немного дальше и создадим плавающий свет с беспроводным питанием.
Необходимые материалы
Чтобы следовать примерам из этого руководства, вам потребуются следующие материалы:
Внимание! LM358 запланирован на EOL. Мы рекомендуем AS358 в качестве замены операционного усилителя общего назначения. Деталь совместима с 358.
Деталь совместима с 358.
Другие используемые детали, которые мы не носим:
- Аналоговый датчик Холла
- 1N5401 Диод
- Индуктор 1 мГн
Необходимые инструменты
Инструменты, необходимые для этого проекта, — это мультиметр и паяльник, но доступ к осциллографу также поможет при тестировании.
Цифровой мультиметр — базовый
В наличии
ТОЛ-12966
16,50 $
$10,73
23
Избранное
Любимый
57
Список желаний
Паяльник — 60 Вт (регулируемая температура)
В наличии
ТОЛ-14456
16,50 $
16
Избранное
Любимый
42
Список желаний
Набор инструментов — набор отверток и бит
В наличии
ТОЛ-10865
10,95 $
7
Избранное
Любимый
26
Список желаний
Рекомендуемая литература
Если вы не знакомы со следующими понятиями, мы рекомендуем ознакомиться с этими учебными пособиями, прежде чем продолжить.
Как пользоваться макетной платой
Добро пожаловать в удивительный мир макетов. Здесь мы узнаем, что такое макетная плата и как с ее помощью построить свою самую первую схему.
Избранное
Любимый
74
Как пользоваться мультиметром
Изучите основы использования мультиметра для измерения непрерывности, напряжения, сопротивления и силы тока.
Избранное
Любимый
64
Введение в операционные усилители с LTSpice
Продолжая с того места, где мы остановились в разделе «Начало работы с LTSpice», мы немного углубимся в LTSpice, представив операционные усилители (OpAmps).
Избранное
Любимый
12
Основы теории
Что касается магнитной левитации, то существует два вида левитации: притягивающая и отталкивающая. В этом руководстве мы собираемся использовать привлекательную схему левитации, так как с ней намного проще работать. Как известно, у магнита два полюса, северный и южный. Магнитные поля с одинаковой полярностью отталкиваются друг от друга, тогда как противоположные полюса притягиваются. Для магнитной левитации нам нужно фиксированное магнитное поле, обеспечиваемое постоянными магнитами, и магнитное поле, которым мы можем управлять для позиционирования постоянных магнитов.
В этом руководстве мы собираемся использовать привлекательную схему левитации, так как с ней намного проще работать. Как известно, у магнита два полюса, северный и южный. Магнитные поля с одинаковой полярностью отталкиваются друг от друга, тогда как противоположные полюса притягиваются. Для магнитной левитации нам нужно фиксированное магнитное поле, обеспечиваемое постоянными магнитами, и магнитное поле, которым мы можем управлять для позиционирования постоянных магнитов.
Изображение предоставлено Geek3 через Википедию, CC BY-SA 3.0
Чтобы создать магнитное поле, которым можно управлять, мы можем использовать индуктор. Катушки индуктивности хранят энергию подобно конденсаторам; в то время как конденсаторы сохраняют напряжение в виде электрического поля, катушки индуктивности сохраняют ток, создавая магнитное поле. Здесь мы будем использовать магнитное поле катушки индуктивности для взаимодействия с магнитами. При притягательной левитации индуктор используется для противодействия силе тяжести, которая затем притягивает магнит к индуктору.
Если магнит окажется слишком близко к индуктору, напряженность поля магнита будет достаточно сильной, чтобы прилипнуть к индуктору, независимо от того, какой ток проходит через индуктор. Однако, если магнит находится слишком далеко от индуктора, напряженность магнитного поля будет слишком слабой по сравнению с гравитацией, чтобы ее можно было поднять обратно. Таким образом, хитрость заключается в том, чтобы найти окно, где магнит недостаточно силен, чтобы подтянуться сам по себе, но благодаря притяжению противодействующего поля индуктора магнит способен преодолеть гравитацию. Чтобы отслеживать его положение, мы будем использовать датчик магнитного поля, называемый датчиком на эффекте Холла.
Датчик Холла
Датчик Холла — это устройство, используемое для измерения напряженности магнитного поля. Выход датчика прямо пропорционален напряженности магнитного поля, проходящего через него. Датчик, который нам понадобится, это SS496B, который имеет аналоговое напряжение на выходе . Существуют и другие датчики на эффекте Холла, которые действуют как переключатель и включаются или выключаются только при наличии магнитного поля. В следующем разделе мы увидим, как датчик реагирует на присутствие наших магнитов.
Существуют и другие датчики на эффекте Холла, которые действуют как переключатель и включаются или выключаются только при наличии магнитного поля. В следующем разделе мы увидим, как датчик реагирует на присутствие наших магнитов.
Тестирование датчика Холла
Давайте сначала проверим, как работает датчик. С макетной платой подключите 5V к контакту напряжения питания, земля к земле, а к выходному контакту подключите либо щуп осциллографа, чтобы наблюдать за изменением напряжения, либо мы можем использовать мультиметр в режиме напряжения, чтобы наблюдать за изменением напряжения.
Без магнита выходное напряжение составляет около 2,5 В . С одной стороны магнита по мере приближения магнита к датчику напряжение уменьшается. Если вы перевернете магнит и поднесете его ближе к датчику, вы увидите увеличение выходного напряжения. Обратите внимание, на какой стороне напряжение уменьшается. Это может помочь сделать отметку перманентным маркером, который пригодится в нашем следующем тесте.
Примечание: Магниты, используемые на фотографиях, круглые, диаметром около 0,5 дюйма и высотой 0,1 дюйма, но квадратные магниты также подойдут. Важно то, что это неодимовые (также известные как редкоземельные) магниты.
Прежде чем перейти к следующему тесту, нам нужно удлинить выводы нашего датчика, добавив провод. Рекомендуется добавить термоусадочную трубку вокруг каждого паяного соединения, чтобы убедиться, что они не замыкаются друг на друга, но немного изоленты вокруг выводов также подойдет. На изображении ниже датчик имеет красный провод для подачи положительного напряжения, черный для отрицательного и желтый провод для аналогового выхода.
Пока паяльник горячий, самое время припаять провод к индуктору. Использование разных цветов для двух контактов индуктора может помочь в устранении неполадок в дальнейшем.
Создание схемы управления
Как упоминалось в Основах теории, важно, чтобы магнит располагался достаточно близко к магнитному полю катушки индуктивности, чтобы он мог взаимодействовать с магнитом, но не настолько близко, чтобы собственное магнитное поле магнита способен подтянуться к индуктору независимо от мощности. Что нам нужно, так это способ управления индуктором, чтобы, когда магнит находится слишком далеко, индуктор притягивал магнит ближе, но выключался, когда он подходит слишком близко, чтобы гравитация все еще могла притягивать его обратно.
Что нам нужно, так это способ управления индуктором, чтобы, когда магнит находится слишком далеко, индуктор притягивал магнит ближе, но выключался, когда он подходит слишком близко, чтобы гравитация все еще могла притягивать его обратно.
Прежде чем мы начнем подключать электронику, необходимо сделать подставку, чтобы держать индуктор над землей. В этом руководстве не рассматривается изготовление подставки, но ниже приведена фотография подставки, используемой для справки. Индуктор висит примерно на 5 дюймов над столом, а болт 8-32 (длиной ~ 1,5 дюйма) и гайка используются для крепления индуктора к подставке.
Совет: Убедитесь, что магнит может прилипнуть к болту. Железный материал болта будет «фокусировать» линии магнитного поля на индукторе, и магнит будет подтягиваться к центру индуктора.
После установки индуктора нам нужно прикрепить датчик Холла к головке болта. Если на датчике есть оголенный металл, используйте кусок изоленты, чтобы изолировать датчик от болта, и закрепите датчик большим количеством изоленты, как показано ниже. Обратите внимание, что изогнутая сторона датчика обращена от катушки индуктивности.
Обратите внимание, что изогнутая сторона датчика обращена от катушки индуктивности.
Схема компаратора
Для управления катушкой индуктивности мы собираемся использовать операционный усилитель в конфигурации, называемой компаратором, который сравнивает выходной сигнал датчика Холла с опорным напряжением, подключенным к другому входному контакту. . Опорное напряжение устанавливается с помощью потенциометра, действующего как делитель напряжения — это создает регулируемое аналоговое напряжение между 0В и 5В . Напряжение потенциометра представляет собой то напряжение, которое мы хотим, чтобы датчик Холла считывал, что зависит от того, насколько далеко находится магнит.
В этой схеме используются две шины напряжения: 5 В и 12 В . Шина 12 В питает катушку индуктивности и операционный усилитель, а шина 5 В используется для источника опорного напряжения и датчика Холла. Два источника питания идеальны, потому что, если шина 12 В переходит в режим ограничения тока и напряжение падает, датчик Холла не будет иметь достаточно высокого напряжения, чтобы определить, когда магнит находится достаточно близко. Однако вы можете обойтись и одной шиной питания, используя линейный стабилизатор напряжения LM7805. Если вы планируете использовать два блока питания, убедитесь, что вы соедините земли вместе , иначе схема не будет работать корректно.
Однако вы можете обойтись и одной шиной питания, используя линейный стабилизатор напряжения LM7805. Если вы планируете использовать два блока питания, убедитесь, что вы соедините земли вместе , иначе схема не будет работать корректно.
Примечание: На схеме U2 указан как SS494, но следует использовать SS496 , так как он имеет большую чувствительность, но распиновка такая же.
Схема схемы компаратора
Нечеткое изображение схемы компаратора
После того, как схема построена, мы будем использовать мультиметр для измерения напряжения на неинвертирующем входе (вывод 2 операционного усилителя) и включить ручку на потенциометре, пока он не покажет 0В . Затем мы поместим магнит на расстоянии около 2 см от сенсора или толщиной с большой палец. По сути, магнит должен находиться в «наилучшем месте» — в положении немного дальше, чем положение, в котором магнит хочет самостоятельно подтянуться и прилипнуть к индуктору.
Судя по выходному напряжению операционного усилителя (контакт 1), оно должно быть 9-12 В . С магнитом, все еще на месте, мы собираемся медленно поворачивать потенциометр и увеличивать опорное напряжение, пока не увидим изменение напряжения с 12 В до 0 В . Небольшое перемещение магнита вверх и вниз должно изменить выходной сигнал операционного усилителя с высокого на низкий и с низкого на высокий.
Компаратор пытается поддерживать равные напряжения между входными контактами и устанавливает на выходе высокий или низкий уровень, чтобы значение датчика соответствовало эталонному значению. На следующем шаге мы присоединим нашу катушку индуктивности к выходу операционного усилителя и попытаемся заставить магнит левитировать!
Левитация магнита
Теперь, когда мы понимаем, как компаратор будет управлять индуктором, давайте попробуем левитировать магнит. Операционные усилители хорошо справляются с управлением сигналами, но для приложений с большим током, подобных этому, нам понадобится полевой МОП-транзистор. Отключите питание цепи, которую мы построили в предыдущем разделе, и подключите следующую цепь. Не пропустите диод! Когда катушка индуктивности отключается, создаваемое ею магнитное поле разрушается, что может вызвать сильный всплеск напряжения и повредить MOSFET. На схеме указан диод 1N4007, но диод 1N5401 должен лучше работать с пиками обратного тока.
Отключите питание цепи, которую мы построили в предыдущем разделе, и подключите следующую цепь. Не пропустите диод! Когда катушка индуктивности отключается, создаваемое ею магнитное поле разрушается, что может вызвать сильный всплеск напряжения и повредить MOSFET. На схеме указан диод 1N4007, но диод 1N5401 должен лучше работать с пиками обратного тока.
Примечание: На схеме U2 указан как SS494, но следует использовать SS496 , так как он имеет большую чувствительность, но распиновка такая же.
Схема схемы компаратора с индуктором
Сжатое изображение схемы компаратора с индуктором
При выключенном питании поверните ручку потенциометра до упора в одну сторону, чтобы установить опорное напряжение к 5В . Затем включите питание и убедитесь, что на выходе операционного усилителя отображается значение 9.0113 0В . Расположите магниты между большим и средним пальцами, как показано ниже. Ваш большой палец сможет поймать магнит, если он притянется к индуктору, а ваш средний палец уравновесит магниты и поймает их, если магниты упадут.
Другой рукой медленно уменьшите опорное напряжение. Когда вы приблизитесь к точке перехода из построения схемы управления, магниты должны начать левитировать. Если магниты подпрыгивают до большого пальца, снова увеличьте напряжение и повторите попытку. С некоторой практикой и небольшими, но точными движениями магниты должны быть в состоянии левитировать.
Совет: Если магнит пытается перевернуться так, что метка на магнитах направлена в сторону от индуктора, магнитные поля одинаковы и отталкивают друг друга. Реверсивное подключение катушки индуктивности решит эту проблему.
Возможность считывать ток от источника питания 12 В — хороший способ увидеть, где находится точка левитации. Когда магнит находится слишком близко, ток должен быть меньше 10 мА. С магнитами, которые я использую, величина используемого тока составляет около 80 мА, и я могу левитировать в окне 2-3 см от индуктора. Немного потренировавшись, вы сможете заставить свои магниты левитировать!
Беспроводное питание
Если левитация магнита недостаточно крута, вы можете добавить еще больше сложности, добавив светодиод с беспроводным питанием. Этот шаг требует еще нескольких инструментов, которые есть не у всех. Для этого раздела вам понадобится следующее:
Этот шаг требует еще нескольких инструментов, которые есть не у всех. Для этого раздела вам понадобится следующее:
Сборка передающей катушки
Индуктор, используемый для левитации магнитов, обеспечивает мощность, достаточную только для удержания магнита на месте. Для беспроводной передачи энергии нам потребуется сделать второй индуктор, который мы будем наматывать с помощью магнитной проволоки. Магнитная проволока представляет собой тонкую проволоку с еще более тонким изоляционным слоем. Это позволяет виткам проводов располагаться еще ближе друг к другу и увеличивает создаваемую индуктивность по сравнению с тем же количеством витков провода с обычной изоляцией.
Беспроводная передача энергии работает по тому же принципу, что и трансформатор, где один индуктор индуцирует ток в другом индукторе, за исключением того, что вместо использования железного сердечника для передачи потока от одного индуктора к другому используется воздух, аналогичный катушка тесла. Одна из проблем беспроводной передачи энергии заключается в том, что она очень неэффективна. Первичная сторона трансформатора будет потреблять много энергии, чтобы генерировать немного мощности на вторичной обмотке.
Первичная сторона трансформатора будет потреблять много энергии, чтобы генерировать немного мощности на вторичной обмотке.
Создание основного
Первичная обмотка состоит из 25 витков магнитной проволоки калибра 30 с диаметром в центре 1 дюйм. Поскольку инженеры не в состоянии что-либо выбрасывать, я использовал пустую катушку соединительного провода с отрезанным концом, чтобы снять магнитный провод.
Чтобы катушка не разматывалась, вы можете отрезать небольшой кусок дополнительного магнитного провода и обернуть его вокруг первичной обмотки с двух сторон, чтобы он держал форму. Эмалевое покрытие провода затрудняет прилипание припоя к проводу. Поэтому с помощью наждачной бумаги счистите часть эмали, чтобы можно было припаять пару контактов, как показано ниже, или припаяйте провод непосредственно к катушке, чтобы добраться до макетной платы.
Изготовление вторичной обмотки
Вторичная сторона была изготовлена таким же образом, за исключением того, что на этот раз использовалось 100 витков магнитной проволоки вместе с диодом и двумя конденсаторами для преобразования мощности переменного тока в мощность постоянного тока для светодиода. См. схему ниже.
См. схему ниже.
Схема создания вторичной обмотки беспроводной передачи энергии
Отрежьте несколько дополнительных кусков магнитной проволоки, чтобы скрепить вторичную обмотку, как это было сделано с первичной обмоткой. На этот раз отрежьте большие куски, чтобы петля вокруг радиатора светодиода удерживалась в центре вторичной обмотки. Кусок двустороннего скотча был использован для крепления магнитов к нижней части радиатора светодиода. Убедитесь, что при размещении магнитов метка на магнитах направлена в сторону от светодиода.
| В сборе Вторичный — Верх | Вторичная часть в сборе — нижняя часть |
Сборка первичного драйвера и тестирование
Чтобы индуцировать ток во вторичной катушке, нам нужно сгенерировать сигнал переменного тока с помощью функции или генератора частоты, который позволит нам найти наилучшую частоту для использования с этими катушками индуктивности, которые мы сделанный.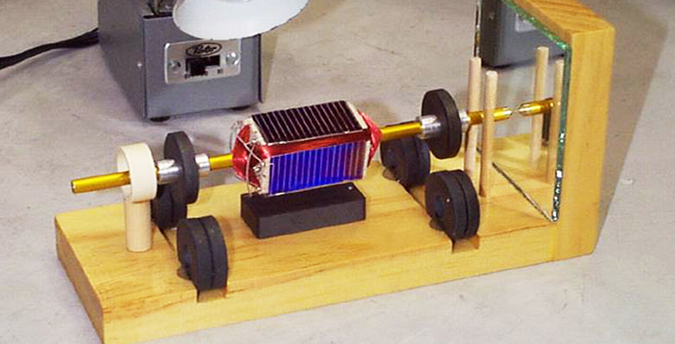 Как и в случае с операционным усилителем для схемы левитации, функциональный генератор не может генерировать очень большой ток, поэтому нам нужно будет использовать другой MOSFET для управления нашей первичной катушкой. Схема довольно проста, входной сигнал прямоугольной формы имеет амплитуду 5V и смещение по постоянному току 2.5V (нам нужна прямоугольная волна с высоким уровнем до 5V и низким до 0V). Обязательно прикрепите радиатор к этому мосфету, так как они довольно быстро нагреваются.
Как и в случае с операционным усилителем для схемы левитации, функциональный генератор не может генерировать очень большой ток, поэтому нам нужно будет использовать другой MOSFET для управления нашей первичной катушкой. Схема довольно проста, входной сигнал прямоугольной формы имеет амплитуду 5V и смещение по постоянному току 2.5V (нам нужна прямоугольная волна с высоким уровнем до 5V и низким до 0V). Обязательно прикрепите радиатор к этому мосфету, так как они довольно быстро нагреваются.
Чтобы найти наилучшую частоту для использования, я использовал свой измеритель LCR, который может измерить индуктивность моей вторичной катушки, а также получить точное значение для C1 из схемы и рассчитал резонансную частоту около 80 кГц. Существует баланс между частотой и потребляемым током от источника питания. Чем ниже частота, тем ярче будет светодиод, но эффективность крайне низкая, и MOSFET, управляющий первичной катушкой, будет сильно нагреваться. Лучший подход к этой проблеме — определить, насколько высокую частоту вы можете использовать, чтобы при этом иметь достаточную яркость светодиодов.
Присоединение основного индуктора к левитирующему индуктору
Теперь, когда беспроводная передача энергии работает, пришло время прикрепить основной индуктор беспроводной энергии к левитирующему индуктору. Немного изоленты прикрепите индуктор из 25 витков, который мы сделали, к нижней части индуктора левитации, где находится датчик Холла.
Нахождение новой дистанции левитации
Вес света и магнитов теперь значительно тяжелее, чем с одними магнитами. Когда первичная беспроводная сеть отключена от остальной цепи, используйте потенциометр эталонного напряжения, чтобы отрегулировать расстояние левитации. Из-за массы магниты должны быть значительно ближе, примерно на 1 см. Уменьшение напряжения на потенциометре уменьшит расстояние левитации. После того, как свет начнет левитировать, вы можете снова подключить первичную обмотку и включить или выключить выход функционального генератора, чтобы управлять светодиодом.
Ранее я упоминал, что это неэффективно. Но насколько неэффективно? Я измерил ток около 50 мА, а напряжение на светодиоде составило 2,72 В, поэтому схема получает мощность около 136 мВт. Напряжение питания установлено на 12 В, а при левитирующем магните и включенном свете схема потребляет 886 мА, или 10,6 Вт, что дает КПД 1,3%. Справедливости ради следует отметить, что схема левитации потребляет около 450 мА, так что эффективность беспроводной передачи энергии на самом деле составляет около 2,5%. Теперь, когда мы знаем, на какой частоте может работать наша беспроводная силовая цепь, функциональный генератор можно заменить новой схемой, использующей таймер 555 для генерации сигнала прямоугольной формы.
Но насколько неэффективно? Я измерил ток около 50 мА, а напряжение на светодиоде составило 2,72 В, поэтому схема получает мощность около 136 мВт. Напряжение питания установлено на 12 В, а при левитирующем магните и включенном свете схема потребляет 886 мА, или 10,6 Вт, что дает КПД 1,3%. Справедливости ради следует отметить, что схема левитации потребляет около 450 мА, так что эффективность беспроводной передачи энергии на самом деле составляет около 2,5%. Теперь, когда мы знаем, на какой частоте может работать наша беспроводная силовая цепь, функциональный генератор можно заменить новой схемой, использующей таймер 555 для генерации сигнала прямоугольной формы.
Ресурсы и дальнейшее развитие
Одним из способов дальнейшего развития этого проекта является повышение эффективности беспроводной передачи энергии. Если у вас есть доступ к измерителю LCR, который может измерять индуктивность, емкость, а также сопротивление, вы можете найти точные значения L1 и C1 вторичных обмоток и ввести значения в калькулятор резонанса LC.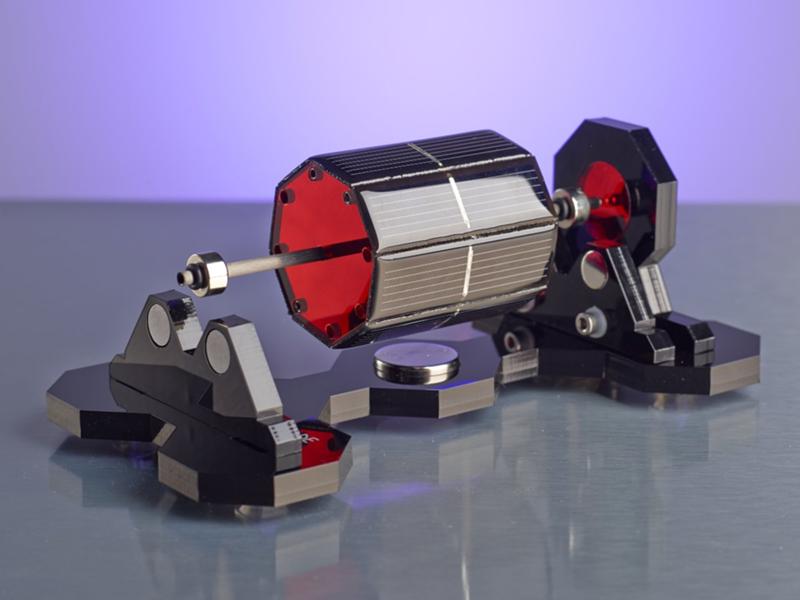 Как только вы узнаете резонансную частоту вторичной обмотки, вы можете измерить индуктивность первичной обмотки, и калькулятор вернет значение емкости. Добавление этого конденсатора параллельно первичной катушке индуктивности и настройка генератора сигналов на эту частоту должны повысить эффективность. А пока ознакомьтесь с некоторыми ссылками ниже:
Как только вы узнаете резонансную частоту вторичной обмотки, вы можете измерить индуктивность первичной обмотки, и калькулятор вернет значение емкости. Добавление этого конденсатора параллельно первичной катушке индуктивности и настройка генератора сигналов на эту частоту должны повысить эффективность. А пока ознакомьтесь с некоторыми ссылками ниже:
- Магнитные поля
- Эффект Холла
- Электромагнетизм
Нужно больше вдохновения? Ознакомьтесь с другими замечательными уроками от SparkFun:
.
Дистанционный фотонный датчик уровня воды
Узнайте, как построить удаленный датчик уровня воды для резервуара для хранения воды и как автоматизировать насос на основе показаний!
Избранное
Любимый
15
Праздничные открытки Let It Glow
Создайте светящуюся открытку для друзей и семьи в этот праздничный сезон с помощью бумажных схем — пайка не требуется!
Избранное
Любимый
11
Буквенно-цифровые настенные GPS-часы
Это часы с GPS-управлением — часы, которые вам действительно не нужно настраивать! Используя GPS и некоторые формулы, мы выясняем, какой день недели и переходим ли мы на летнее время или нет.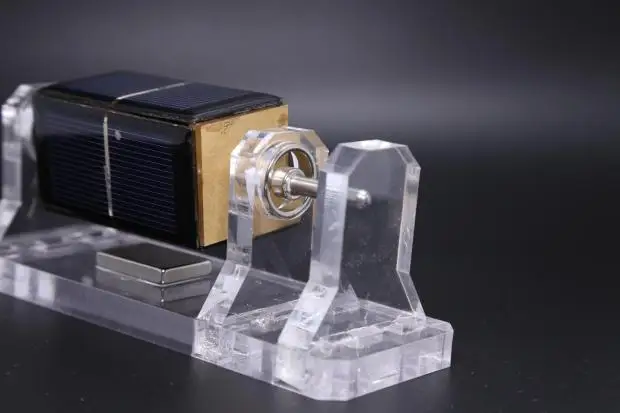
Избранное
Любимый
13
Модификация инвертора EL Wire
В этом уроке мы модифицируем проводной инвертор 12V EL для питания EL Sequencer/EL Escudo Dos от одного источника питания.
Избранное
Любимый
3
Магнитная левитация | Хакадей
9 ноября, 2021, Дэйв Раунтри
Как бы это ни было сделано, с каким бы уровнем фальши, магнитная левитация выглядела круто. Мы не знаем о вас, но просто прогуливаясь мимо самого безвкусного магазина гаджетов, дисплеи левитирующих и вращающихся объектов всегда бросаются в глаза. Помимо сверхпроводников, почти все эти устройства работают одинаково; объект с постоянным редкоземельным магнитом удерживается в устойчивом положении между парой электромагнитов, один сверху и один снизу, с некоторой управляющей электроникой для регулировки напряженности поля и замыкания контура.
Но может быть и другой способ, хотя и довольно частный случай, когда магнит можно не только левитировать, но и зафиксировать на месте с помощью вращающегося магнитного поля. В видео показана демонстрация того, как можно использовать массу магнита для фазовой синхронизации с вращающимся полем. По сути, магнит захочет вращаться, чтобы выровняться с вращающимся магнитным полем, но его масса будет означать, что существует временная задержка для действия силы и возникновения вращения, которое будет отставать от вращающегося магнитного поля, и если оно сфазировано. именно так вращение будет отменено, и магнит будет заблокирован в стабильном положении. По сути, инерция магнита может быть использована для противодействия склонности магнита к быстрому вращению, чтобы найти устойчивое положение в поле.
Хотя идея не нова, турецкий экспериментатор [Хамди Укар] уже некоторое время работает над этой темой (посмотрите на его канале YouTube, где можно найти МНОГО контента), даже опубликовав очень подробную научную статью.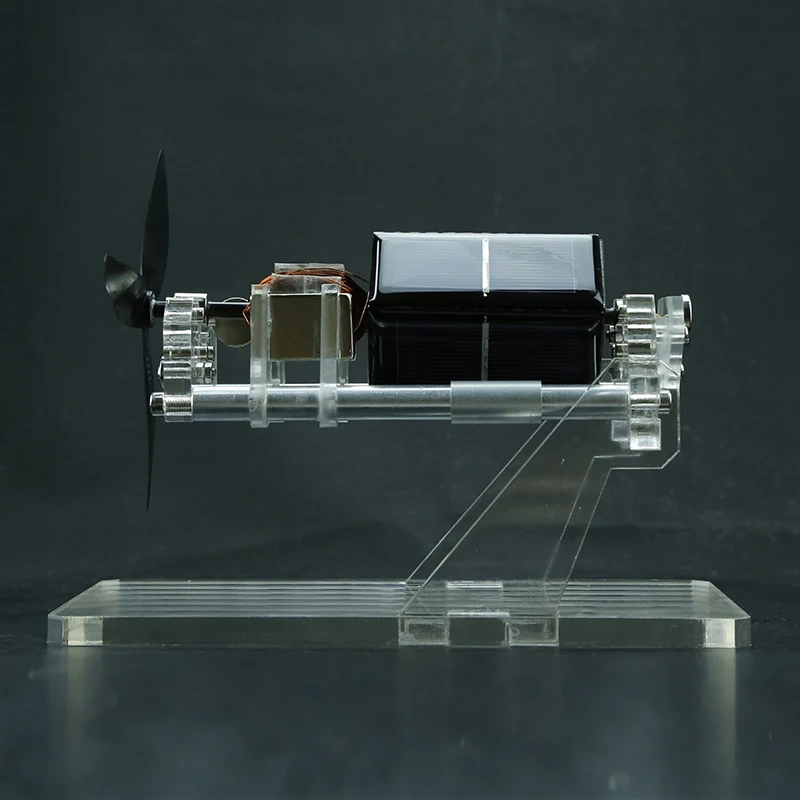 по этому вопросу. В нашем объяснении здесь мы пытаемся упростить тему ради краткости, но, поскольку в статье много кровавых подробностей для физиков среди вас, если вы справитесь с математикой, вы сможете прийти к своим собственным выводам.
по этому вопросу. В нашем объяснении здесь мы пытаемся упростить тему ради краткости, но, поскольку в статье много кровавых подробностей для физиков среди вас, если вы справитесь с математикой, вы сможете прийти к своим собственным выводам.
Читать далее «Разработка идеи магнитного замка показывает большой прогресс» →
Posted in Разное HacksTagged Магнитная левитация, Магнитная блокировка
16 октября 2021 г. Эл Уильямс
Мы большие поклонники небольших настольных установок на магнитной подушке, которые плавают на магните. Как отмечает [3D Printed Life], они выглядят как магия. Его удивило, что в коммерческих устройствах используется аналоговая электроника. Он решил создать цифровую версию, но не знал, во что ввязывается. Он подробно описывает свое путешествие в видео, которое вы можете посмотреть ниже.
Вместе со специальной платой управления он решил намотать собственные электромагниты. Найдя это утомительным, он построил простую намоточную машину, чтобы автоматизировать часть работы.
Продолжить чтение «Провал недели: магнитная левитация» →
Рубрика: Микроконтроллеры, Разное Хаки Метки: контур управления, маглев, Магнитная левитация, pid
5 сентября 2021 г., Левин Дэй
Магнитная левитация — это красиво. Видеть, как маленькие объекты качаются, казалось бы, парят в воздухе, никогда не устареет. Если вы хотите, чтобы на вашем столе было что-то подходящее, отвлекающее в этом духе, рассмотрите возможность создания этой левитирующей турбины от [JGJMatt].
В конструкции используется комбинация напечатанных на 3D-принтере деталей и металлических стержней для формирования базовой рамы. Турбина также напечатана на 3D-принтере, что позволяет легко создавать сложную геометрию изогнутых ребер. Затем в детали вставляют редкоземельные магниты, чтобы создать эффект левитации. К каждой части рамы прикреплены два магнита, и по одному магниту вставлены в каждый конец турбины. При правильном выравнивании турбина будет парить над рамой и может свободно вращаться практически без трения.
Одной из уступок функциональности является швейная игла, вставленная в турбину. Это давит на одну часть рамы, чтобы турбина не была полностью вытолкнута из магнитного поля. Вполне возможно, что при очень тщательном внимании к деталям при выравнивании штифт можно было бы исключить, но его наличие делает систему гораздо более надежной и надежной.
Плавая в магнитном поле, достаточно простого дуновения воздуха, чтобы заставить турбину вращаться на некоторое время. Это очаровательное украшение стола, с которым можно повозиться, заменив лопасти турбины для разной производительности. Это может показаться легкомысленным, но в более широком масштабе магнитная левитация используется для более серьезных целей, таких как высокоскоростной транспорт. Видео после перерыва.
Продолжить чтение «Создание настольной игрушки с парящей турбиной» →
Posted in Разное HacksTagged настольная игрушка, Магнитная левитация
10 августа 2021 г. , Левин Дэй
, Левин Дэй
Поезда
Maglev уже давно рекламируются как новое слово в технологии поездов. Несмотря на живой интерес к середине 20-го века, развитие было медленным, и только ограниченные коммерческие операции когда-либо использовались. Одним из самых известных примеров является шанхайский поезд на магнитной подвеске, который соединяет аэропорт с большей частью города. Система была приобретена в Германии как установка «под ключ», действует на расстоянии всего 30,5 км, а по данным 9Журнал 0097 Civil Engineering стоил 1,2 миллиарда долларов на создание в 2001 году. С тех пор он служит ярким примером технологии магнитной подвески — и напоминанием о сложной и дорогой магнитной подвеске.
Однако за последние несколько десятилетий Китай влюбился в высокоскоростной железнодорожный транспорт и вложил в него значительные средства. Благодаря агрессивному режиму передачи технологий от иностранных фирм при строительстве крупнейшей в мире сети высокоскоростных железных дорог страна добилась большого прогресса. Теперь китайский производитель железнодорожного транспорта CRRC Corporation продемонстрировал свой новейший поезд на магнитной подвеске, который надеется стать самым быстрым в мире.
Теперь китайский производитель железнодорожного транспорта CRRC Corporation продемонстрировал свой новейший поезд на магнитной подвеске, который надеется стать самым быстрым в мире.
продолжить чтение «Стремления китайских поездов MagLev подкреплены новой конструкцией со скоростью 600 км / ч» →
Posted in Текущие события, Featured, Slider, Transportation HacksTagged maglev, Магнитная левитация, поезд
22 июля 2021 г. Дэн Мэлони
[Том Стэнтон] прав в одном: из маховиков получаются отличные игрушки. Независимо от того, наблюдаете ли вы за волчком, который, кажется, никогда не замедляется, или чувствуете странные силы, создаваемые гироскопом, вращение вещей приносит странное удовлетворение. А использование маховика в качестве аккумулятора делает его еще круче.
Конечно, использование маховика для хранения энергии далеко не новая концепция. Но принципы, которые [Том] демонстрирует в видео ниже, в том числе преимущества магнитно-левитирующих подшипников, довольно круто увидеть все в одном месте. Сам маховик представляет собой просто тяжелый алюминиевый диск на валу с парой подшипников с каждой стороны, состоящей из стопок неодимовых магнитов. Дополнительный упорный подшипник с низким коэффициентом трения на конце вала удерживает системы надлежащим образом и позволяет маховику вращаться в течение двенадцати минут и более.
Но принципы, которые [Том] демонстрирует в видео ниже, в том числе преимущества магнитно-левитирующих подшипников, довольно круто увидеть все в одном месте. Сам маховик представляет собой просто тяжелый алюминиевый диск на валу с парой подшипников с каждой стороны, состоящей из стопок неодимовых магнитов. Дополнительный упорный подшипник с низким коэффициентом трения на конце вала удерживает системы надлежащим образом и позволяет маховику вращаться в течение двенадцати минут и более.
Следующим шагом [Тома] было использование части углового момента маховика для производства электричества. Он построил пару роторов с большим количеством магнитов, между которыми был зажат статор из специально намотанных катушек. Двухполупериодный мостовой выпрямитель и конденсатор завершают цепь и позволяют маховику питать группу светодиодов или даже небольшой двигатель. Все это красиво сложено и выглядит как забавная настольная игрушка.
Это далеко не первое родео [Тома] с маховиком; его последняя попытка накопить механическую энергию не увенчалась успехом, но ему так или иначе удалось заставить маховики летать.
Продолжить чтение «Магнитные подшипники придают вращение этой батарее маховика» →
Posted in Разное HacksTagged генератор, угловой момент, подшипник, маховик, трение, генератор, маглев, магнитная левитация, неодим, выпрямитель
25 февраля 2020 г. Том Нарди
Если все пойдет по плану, Илон Маск говорит, что первое поколение массивного звездолета SpaceX совершит орбитальный полет до конца 2020 года. научно-фантастические журналы кажутся обычным делом, мы полагаем, что вы заслужили право на толику бравады. Мы рады видеть, как транспортное средство будет развиваться в течение следующих нескольких месяцев, но даже если настоящий останется на земле, мы с радостью возьмем эту «летающую» модель звездолета от [Криса Чимиенти] в качестве утешительного приза.
Модуль магнитной левитации, мы официально в будущем.
Чувствуя себя немного разочарованным 3D-печатными моделями звездолета, которые он нашел в Интернете, [Крис] решил построить свой собственный. Но этого было недостаточно, чтобы просто сделать его больше, сильнее и точнее в соответствии с текущим дизайном Starship; он также хотел сделать это немного более захватывающим. Несколько RGB-светодиодов и Arduino, встроенные в «облачную» подставку, на которой стоит ракета, стали хорошим началом, а посадочная площадка вдохновлена настоящим автономным беспилотным космическим кораблем SpaceX 9.0097 Просто прочтите инструкцию отлично выглядит со светом.
Но этого было недостаточно, чтобы просто сделать его больше, сильнее и точнее в соответствии с текущим дизайном Starship; он также хотел сделать это немного более захватывающим. Несколько RGB-светодиодов и Arduino, встроенные в «облачную» подставку, на которой стоит ракета, стали хорошим началом, а посадочная площадка вдохновлена настоящим автономным беспилотным космическим кораблем SpaceX 9.0097 Просто прочтите инструкцию отлично выглядит со светом.
Но мы говорим о Starship, транспортном средстве, которое может буквально подтолкнуть человечество к тому, чтобы стать многопланетным видом. Чтобы отдать должное, вам действительно нужно выбить его из парка. Поэтому [Крис] нашел в Интернете модуль магнитной левитации, который мог выдержать несколько сотен граммов, и приступил к работе над тем, чтобы его пластиковый звездолет действительно парил над посадочной площадкой.
Как вы понимаете, это было немного сложно. Первые версии ракеты выглядели великолепно, но оказались слишком тяжелыми, поэтому он переключился на печать модели в так называемом «режиме спиральной вазы», что сделало ее полностью полой. Теперь он стал намного легче и благодаря магнитной пластине, встроенной в дно, стал достаточно устойчивым, чтобы плавать самостоятельно. В качестве последнего штриха [Крис] добавил несколько красных светодиодов и батарейку типа «таблетка» к основанию звездолета, чтобы казалось, что гладкий корабль выполняет посадку в последнюю секунду со своими «невозможными» полнопотоковыми ступенчатыми двигателями внутреннего сгорания.
Теперь он стал намного легче и благодаря магнитной пластине, встроенной в дно, стал достаточно устойчивым, чтобы плавать самостоятельно. В качестве последнего штриха [Крис] добавил несколько красных светодиодов и батарейку типа «таблетка» к основанию звездолета, чтобы казалось, что гладкий корабль выполняет посадку в последнюю секунду со своими «невозможными» полнопотоковыми ступенчатыми двигателями внутреннего сгорания.
Это не первая модель ракеты с электронным светящимся облаком под ней, но это, безусловно, первая модель, способная левитировать в воздухе. Хотя эта маленькая ракета может и не долететь до Марса, мы не удивимся, если в ближайшем будущем она коснется столов других хакеров и разработчиков.
Продолжить чтение «Модель левитирующего космического корабля приземляется» →
Опубликовано в Взломы Arduino, Взломы светодиодов, Космоспомеченный 3D-печать, arduino, Магнитная левитация, Светодиод RGB, SpaceX, космический корабль
16 июня 2019 г.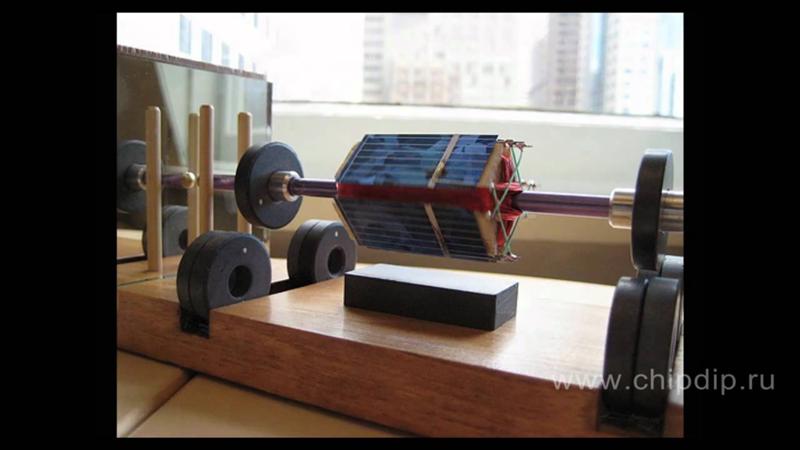 , Роджер Ченг
, Роджер Ченг
Этот стенд было легко не заметить на выставке Maker Faire Bay Area 2019 среди высоких профессиональных вывесок для конференций, установленных соседними экспонентами. Он продемонстрировал работу [Dr. Виктор Чейни], который наслаждается своей основной работой стоматолога и поэтому не испытывает желания коммерциализировать свои изобретения — он создает забавные проекты ради личного удовольствия, которые он просто называет «Творения Вика». Каждый проект строится по своим стандартам, которые, очевидно, довольно высоки, если судить по идеальному глянцевому покрытию каждого изготовленного на заказ деревянного корпуса.
Некоторые из этих творений соответствовали его музыкальным интересам. Backpacking Banjo был построен на основе (хорошо очищенной) банки с кошачьим кормом, чтобы удовлетворить потребность в легком инструменте, который он может взять с собой в поход. Его музыкальная лазерная радужная машина (полностью задокументированная в Nuts & Volts) была создана для того, чтобы небольшие группы, созданные независимыми артистами, такими как он, могли устраивать визуальное световое шоу в дополнение к своим живым выступлениям. Музыкальный калейдоскоп — еще одно подобное исполнение со светодиодной матрицей, цвета которой диктуются музыкой. Выйдя за пределы мира музыки, мы видим замок в облаках, левитирующий на магнитной подушке, который также получает питание по беспроводной сети для освещения светодиодами 9.0003
Музыкальный калейдоскоп — еще одно подобное исполнение со светодиодной матрицей, цвета которой диктуются музыкой. Выйдя за пределы мира музыки, мы видим замок в облаках, левитирующий на магнитной подушке, который также получает питание по беспроводной сети для освещения светодиодами 9.0003
Самая большая и сложная работа на выставке — эпический электромеханический шедевр. Par One — это скульптура с катящимся мячом, изображающая самое запутанное поле для гольфа. Еще несколько вращающихся шаровых скульптур (также называемых мраморными машинами или мраморными дорожками) выставлены в кабинете доктора Чейни, что, должно быть, делает его самым крутым вестибюлем дантиста. Реалистичные движения, которые он смог получить от автоматов, встроенных в скульптуру, захватывают дух, как вы можете видеть ниже.
Продолжить чтение «Изысканное мастерство возвышает творения Вика над остальными» →
Опубликовано в Лазерные хаки, Музыкальные хаки, Технические хакипомеченный бамф, банджо, Bay Area Maker Faire 2019, мастерство, калейдоскоп, кинетическая скульптура, лазерное шоу, Магнитная левитация, Maker Faire, Maker Faire Bay Area, мраморная машина, мраморный бег, скульптура
Левитация на основе магнитного отталкивания — подвал схем
В этой статье о проекте Джефф использует концепцию магнитного отталкивания для левитации объекта.
 Чтобы изучить связанные с этим физические свойства, он начал с некоторых крутых старых игрушечных транспортных средств «маглев». Затем он реализует проект, используя микроконтроллер Espressif ESP8266 и программирование Arduino.
Чтобы изучить связанные с этим физические свойства, он начал с некоторых крутых старых игрушечных транспортных средств «маглев». Затем он реализует проект, используя микроконтроллер Espressif ESP8266 и программирование Arduino.
Земля состоит из слоев, имеющих разный химический состав и разные физические свойства. Земная кора имеет некоторую постоянную намагниченность, но ядро планеты создает собственное магнитное поле. Именно это магнитное поле мы измеряем на поверхности.
Ядро Земли имеет температуру в несколько тысяч градусов по Цельсию из-за радиоактивного нагрева и химической дифференциации. Это немного похоже на природный электрический генератор, в котором конвективная (кинетическая) энергия преобразуется в электрическую и магнитную энергию. Процесс является самоподдерживающимся, пока имеется источник энергии, достаточный для поддержания конвекции.
Земля вращается вокруг оси, которую мы знаем как Северный полюс и Южный полюс. Но из-за несферического ядра создаваемое магнитное поле не совпадает с осью вращения. Поскольку это меняется со временем, карты регулярно корректируются каждые 5 лет или около того, чтобы указать текущее смещение склонения. Константа склонения — это число градусов, на которое северное показание компаса отклонено от оси северного полюса. Это зависит от вашего местоположения на Земле. У нас есть доказательства того, что магнитное поле Земли со временем полностью изменилось. Последнее изменение произошло около 780 000 лет назад и обычно происходит в течение сотен тысяч лет.
Поскольку это меняется со временем, карты регулярно корректируются каждые 5 лет или около того, чтобы указать текущее смещение склонения. Константа склонения — это число градусов, на которое северное показание компаса отклонено от оси северного полюса. Это зависит от вашего местоположения на Земле. У нас есть доказательства того, что магнитное поле Земли со временем полностью изменилось. Последнее изменение произошло около 780 000 лет назад и обычно происходит в течение сотен тысяч лет.
Магнитное поле Земли отклоняет большую часть солнечного ветра, заряженные частицы которого в противном случае сорвали бы озоновый слой, защищающий нас от вредного ультрафиолетового излучения. Магнитное поле Земли дает большинству из нас возможность ориентироваться в мире. Мы используем вращающийся магнит или компас, чтобы обнаружить это магнитное поле и определить направление. Кажется, что у многих животных есть встроенный компас, который помогает им ориентироваться в маршрутах миграции.
ДВИГАТЕЛИ И МАГНИТЫ
Мы используем силу магнитов для создания двигателей, соленоидов, плазмы и даже для крепления произведений искусства на холодильник. Магниты или создаваемые ими поля можно использовать как для притяжения, так и для отталкивания. Все магниты имеют как северный полюс, так и южный полюс. Если дать им волю, они естественным образом притянутся к противоположным полюсам — С-к-Ю и Ю-к-С. Если магниты держать N-к-N или S-к-S, они будут отталкиваться друг от друга, пытаясь уйти от одинаковых полюсов. Это отталкивание — состояние неустойчивое, но столь же полезное, как и притяжение. Фактически, при использовании в двигателе он обеспечивает половину крутящего момента или способности двигаться. Давайте подробнее рассмотрим, как магнитные поля используются для создания движения.
Магниты или создаваемые ими поля можно использовать как для притяжения, так и для отталкивания. Все магниты имеют как северный полюс, так и южный полюс. Если дать им волю, они естественным образом притянутся к противоположным полюсам — С-к-Ю и Ю-к-С. Если магниты держать N-к-N или S-к-S, они будут отталкиваться друг от друга, пытаясь уйти от одинаковых полюсов. Это отталкивание — состояние неустойчивое, но столь же полезное, как и притяжение. Фактически, при использовании в двигателе он обеспечивает половину крутящего момента или способности двигаться. Давайте подробнее рассмотрим, как магнитные поля используются для создания движения.
Многие из нас построили двигатель на уроках физики в средней школе. Хорошее видео для демонстрации этого можно найти на YouTube [1]. Двигатель состоит из источника тока (батареи типа АА), катушки (петли изолированного провода), магнита и якоря (канцелярских скрепок). Якорь на самом деле представляет собой комбинацию скрепок, которые используются в качестве проводящего подшипника, и катушки проволоки, концы которой вытянуты в противоположных направлениях, так что они действуют как ось, проходящая через зажимы. Со скрепками на каждом конце батареи катушка подвешивается между зажимами, как гамак, а магнит прикрепляется к батарее под катушкой. В зависимости от состава вашей батареи, вашему магниту может понадобиться клей, скотч или глина, чтобы оставаться на месте.
Со скрепками на каждом конце батареи катушка подвешивается между зажимами, как гамак, а магнит прикрепляется к батарее под катушкой. В зависимости от состава вашей батареи, вашему магниту может понадобиться клей, скотч или глина, чтобы оставаться на месте.
— РЕКЛАМА—
—Реклама здесь—
Поскольку провод катушки изолирован, ток не будет течь. Поместите катушку на плоскую поверхность и соскребите изоляцию только с верхней части обоих концов. Поместите катушку обратно в держатель для скрепки. Когда катушка вращается так, что оголенная сторона проводов катушки соприкасается с зажимами, через катушку должен течь ток, а создаваемое магнитное поле заставит катушку притягиваться к магниту или отталкиваться от него, создавая крутящий момент и вращение. . Импульс заставит катушку продолжать вращение, как только изоляция катушки повернется и прервет ток. Двигатель будет толкаться каждый раз, когда неизолированная часть выводов катушки снова соприкасается с зажимами.
ВРЕМЯ ИМЕЕТ ВАЖНОЕ ВРЕМЯ
Существует некоторая важная синхронизация между протеканием тока и положением катушки, благодаря которому все это происходит.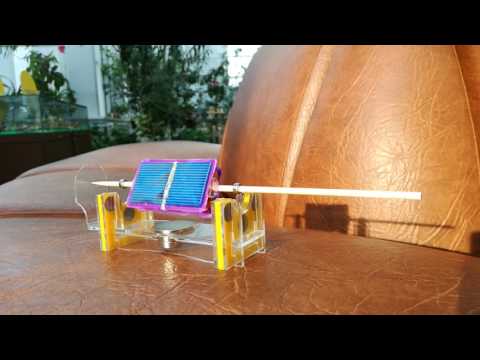 Ток должен включаться (пульсировать) в соответствующее время для непрерывного движения. Если ток катушки не отключен, как только вращение катушки приведет ее магнитное поле к ближайшей точке притяжения к неподвижному магниту, она попытается остаться там, предотвращая дальнейшее вращение.
Ток должен включаться (пульсировать) в соответствующее время для непрерывного движения. Если ток катушки не отключен, как только вращение катушки приведет ее магнитное поле к ближайшей точке притяжения к неподвижному магниту, она попытается остаться там, предотвращая дальнейшее вращение.
Простой двигатель, который я только что описал, на самом деле состоит из двух магнитов — стационарного постоянного магнита (установленного на батарее) и электромагнита, состоящего из катушки проволоки. Электромагнит может быть запитан, создавая управляемый магнит. В этом простом примере одна и та же полярность применяется к катушке один раз на каждые 360 градусов вращения. Напротив, более сложные двигатели используют коммутатор для применения одной полярности для первой половины оборота и противоположной полярности для другой половины оборота. Это дает катушке двигателя два притяжения за оборот. Двигатели могут иметь несколько наборов катушек и коммутаторов для обеспечения повышенного крутящего момента и относятся к категории «щеточных двигателей постоянного тока».
Несмотря на то, что конструкция коммутатора выполняет все функции включения и переключения полярности, у него есть точка износа — щетки (грязесъемники), которые замыкают и размыкают соединения при вращении вала. Мы можем устранить эту точку износа, поменяв местами постоянные магниты и электромагниты. С постоянными магнитами на вращающемся якоре и неподвижными электромагнитами щетки не нужны, и эти двигатели относятся к категории «бесщеточных». Однако нам нужна интеллектуальная схема для электронного управления катушками. Эти двигатели использовались в дисководах, а теперь популярны в электрических самолетах и дронах (см. мою серию статей из трех частей «Электронное управление скоростью» в 9).0097 Circuit Cellar 336–338 (с июля по сентябрь 2018 г. [2]). На рис. 1 показано расположение постоянных магнитов (ПМ) для щеточных и бесщеточных двигателей постоянного тока. Если мы разделим двигатель постоянного тока и выровняем его, как в рис. 2 , то вращательное движение превратится в линейное движение. Обратите внимание, что статор (снаружи) и ротор (внутри) взаимозаменяемы.
Обратите внимание, что статор (снаружи) и ротор (внутри) взаимозаменяемы.
- Рисунок 1
- Рисунок 2
РИСУНОК 1. В коллекторном двигателе постоянного тока слева используется коммутатор для автоматического включения внутренних катушек таким образом, что ротор всегда притягивается или отталкивается в одном направлении. Справа бесщеточный двигатель постоянного тока, который меняет положение магнитов и катушек. Хотя это устраняет необходимость в щетках, которые изнашиваются, требуется некоторая причудливая электроника для правильного включения катушек статора [3]. РИСУНОК 2. Мы думаем, что большинство двигателей производят вращательное движение на своих валах. Однако, если бы двигатель был разделен, развернут плоско и расширен с обоих концов, движение, которое он производит, было бы линейным [4].
ПОДВЕСИТЬ
Еще в 1990 году я писал о подвешивании объекта в воздухе («Как бросить вызов гравитации без использования черной магии» ( Circuit Cellar 18, декабрь 1990 г.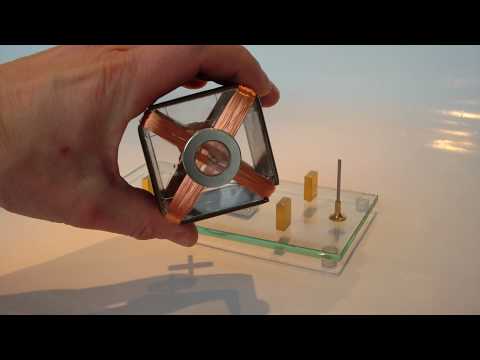 /январь 1991 г.) [5]). В этом проекте использовался электромагнит для притяжения объекта с помощью встроенного магнита и удержания его в подвешенном состоянии. В этом месяце мы перевернем эту идею с ног на голову. Вместо приостановки с притяжением мы будем приостанавливать отталкиванием. На самом деле, эта часть проста. Если бы мы могли расположить PM поверх PM так, чтобы они отталкивались, один бы парил над другим. К сожалению, без какого-либо способа удержать их от отклонения, они просто сдвинутся с оси.
/январь 1991 г.) [5]). В этом проекте использовался электромагнит для притяжения объекта с помощью встроенного магнита и удержания его в подвешенном состоянии. В этом месяце мы перевернем эту идею с ног на голову. Вместо приостановки с притяжением мы будем приостанавливать отталкиванием. На самом деле, эта часть проста. Если бы мы могли расположить PM поверх PM так, чтобы они отталкивались, один бы парил над другим. К сожалению, без какого-либо способа удержать их от отклонения, они просто сдвинутся с оси.
Я люблю игрушки. Они могут обеспечить недорогой способ исследовать и экспериментировать с физическими свойствами. В поисках некоторых примеров магнитной левитации я остановился на паре транспортных средств «маглев». Возможно, вы видели поезда на магнитной подвеске в Китае, Южной Корее или Японии. Некоторые системы были созданы для коротких рейсов, таких как шаттлы из города в аэропорт. Как и все новые технологии, затраты очень высоки, и лишь немногие из них приносят прибыль.
Мне удалось раздобыть два игрушечных поезда на магнитной подвеске: OWI Robotikit’s Magnetic Levitation Express ( Рисунок 3a ) и набор левитирующего поезда Discovery #Mindblown ( Рисунок 3b ). Каждый использует схожие принципы, но реализация немного отличается. Парение осуществляется с помощью пластикового встроенного магнитного материала.
Каждый использует схожие принципы, но реализация немного отличается. Парение осуществляется с помощью пластикового встроенного магнитного материала.
РИСУНОК 3. Я подобрал эти два экземпляра игрушечных поездов на магнитной подушке. (вверху) производится OWI, а (внизу) распространяется через Merchant Source.
На заметку: вы можете найти ручки с эффектом Холла ( Рисунок 4 ). Это перо покажет N или S (и подаст звуковой сигнал) при обнаружении магнитного поля. Я использовал его, чтобы определить, как намагничиваются различные материалы. Гибкие редкоземельные или ферритовые магниты изготавливаются путем каландрирования или экструдирования магнитных порошков в гибкую смесь, такую как винил. Плотность магнитного порошка влияет на магнитные свойства конечного продукта. Этот материал можно намагничивать во многих форматах ( Рисунок 5 ). Например, обычные магниты на холодильник обладают такими свойствами только с одной стороны. Их часто намагничивают чередующимися полюсами, перетаскивая по их поверхности несколько сильных (неодимовых) магнитов, создавая полосы из попеременно намагниченного материала.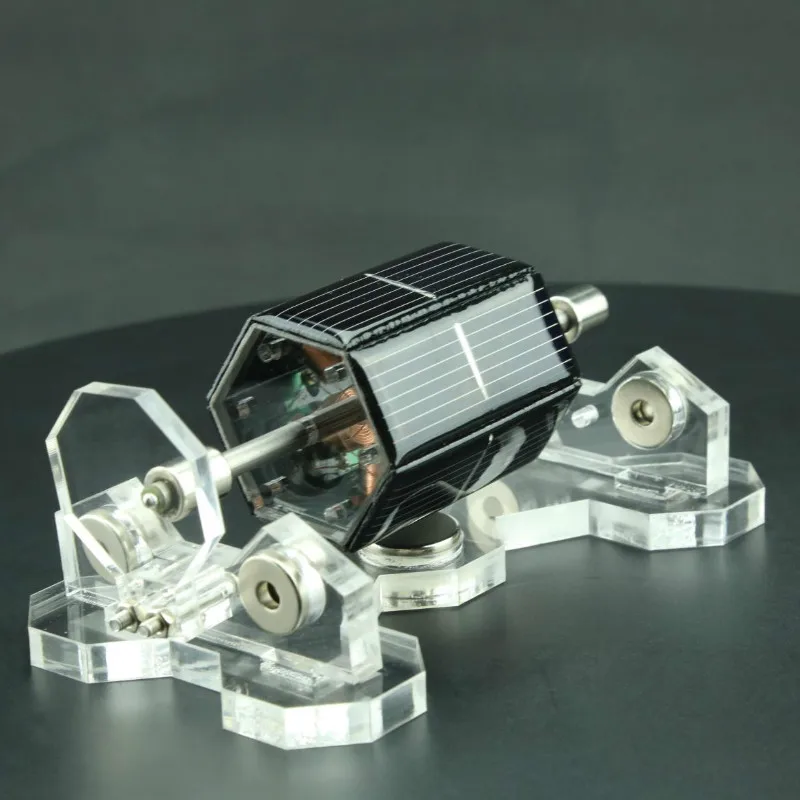
- Рисунок 4
- Рисунок 5
РИСУНОК 4. Обе эти ручки с эффектом Холла (магнитные) воспринимают магнитные поля. Белый кончик верхней ручки становится синим, когда он приближается к магнитному полю. Нижняя ручка имеет красный/зеленый светодиоды для индикации полярности поля. Он также издает звуковой сигнал, но не такой чувствительный, как верхний перо. Окружность кольцевого магнита может иметь один полюс или несколько противоположных полюсов. Листовой/полосовой материал может иметь аналогичные форматы. Интересно, что магниты на холодильник намагничиваются только с одной стороны.
Я воспользовался магнитной ручкой и нашел чередующиеся полюса в одном направлении с полосами одиночных полюсов в другом направлении. Я поэкспериментировал, нарисовав на материале два круга (размером примерно с монетку). Затем с помощью магнита я протер поверхность внутри одного круга полюсом N, а другого круга — полюсом S магнита. С помощью магнитной ручки я смог убедиться, что область внутри каждого круга намагничивается разными полюсами! Интересно, что противоположная поверхность магнита холодильника не проявляла признаков магнетизма.
— РЕКЛАМА—
—Реклама здесь—
Теперь вернемся к левитирующим поездам. С помощью магнитной ручки я смог определить, что магнитные полоски, используемые в обоих наборах, бывают двух форматов. Первый формат я назову «парящие полосы». Они были намагничены таким образом, что каждая поверхность представляла собой один полюс, верхняя поверхность — один полюс, а нижняя поверхность — противоположный полюс. Второй формат, который я назову «полосами положения», имеет чередующийся рисунок полюсов вдоль каждой поверхности. Расстояние между полюсами меняется каждые 0,5 дюйма, что одинаково для обоих комплектов!
Поезда сами по себе имеют соответствующие парящие магниты вдоль левой и правой сторон каждого вагона. Они расположены на таком же расстоянии друг от друга, как и парящие магниты в каждом сегменте гусеницы. Пути гладкие, без физического рельса. Вагоны поезда плывут по рельсам от встречных магнитов. Но без какого-либо метода удержания автомобиля в центре он хочет сойти с рельсов то в одну, то в другую сторону.
В поезде «Дискавери» используются парящие магниты одного полюса с каждой стороны пути. Это означает, что автомобильные магниты должны быть противоположными полюсами. Вы можете поставить машину на трассу в любом направлении, и она зависнет. В поезде OWI используются противоположные парящие магниты, и поезд будет парить в одном направлении и притягивать проезжую часть в другом. Это может показаться недальновидным, пока вы не увидите, чем отличаются системы.
Разница заключается в том, как каждый поезд удерживается по центру своего рельсового пути. Поезд «Дискавери» зависает над рельсовым полотном, борта которого проходят вниз по краю пути. На обеих сторонах есть маленькие колеса, которые могут касаться края гусеницы и предотвращать боковое падение автомобиля с гусеницы. Они не поддерживают вес автомобиля, а просто удерживают его по центру.
Как и поезд «Дискавери», поезд OWI также хочет двигаться вбок от центра пути. Однако он немного смещен от центра, поэтому всегда пытается сместиться вправо.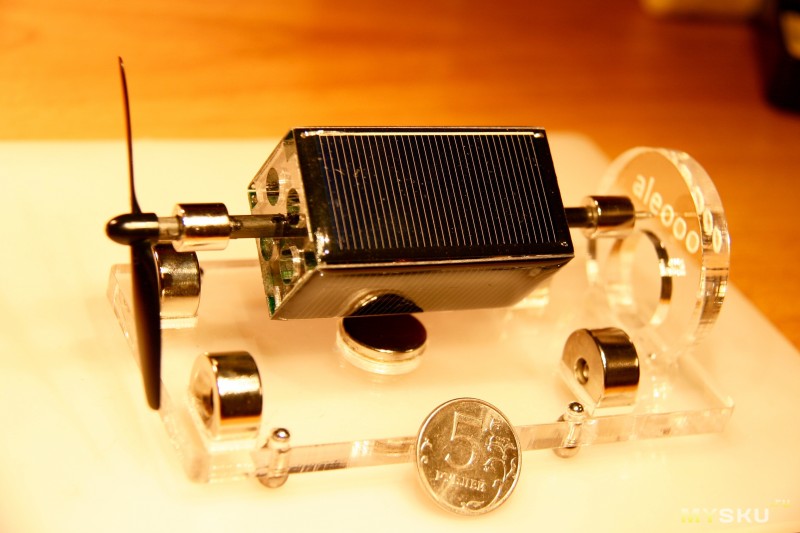 У поезда колеса только с правой стороны. Эти колеса не касаются гусеницы. Вместо этого они касаются внешней боковой стены, проходящей вдоль одной стороны пути, что предотвращает сход поезда с рельсов.
У поезда колеса только с правой стороны. Эти колеса не касаются гусеницы. Вместо этого они касаются внешней боковой стены, проходящей вдоль одной стороны пути, что предотвращает сход поезда с рельсов.
MOVE IT
Два набора поездов отличаются не только тем, как они зависают над рельсами, но и форматами, которые они используют для управления движением поездов. Оба набора движутся по одним и тем же магнитным принципам, но по-разному определяют свое положение. Поезд OWI использует позиционирующие полосы, расположенные на боковой стене, к которой он отталкивается. Двойные датчики Холла, расположенные на передней и задней сторонах локомотива, считывают чередование полюсов позиционирующего магнита. Расстояние между датчиками не кратно 0,5-дюймовому чередующемуся расстоянию между полюсами позиционных магнитов. Это означает, что сигналы от них будут немного не в фазе друг с другом. Это точно так же, как те, которые используются для кодирования движения колеса. Они обеспечивают определение как движения, так и направления.
Они обеспечивают определение как движения, так и направления.
Поезд Discovery использует оптическую систему для определения положения/движения. Путь в этой системе больше похож на традиционный железнодорожный путь с рельсовыми шпалами. Шпалы на самом деле не удерживают никаких физических рельсов — между шпалами в полотне есть открытые пространства. Расстояние такое же, как и у позиционных магнитов — отверстие 0,5 дюйма, за которым следует стяжка 0,5 дюйма. Пара передатчик-приемник с ИК (инфракрасным) светодиодом смотрит вниз на дорожку и сигнализирует об отражении, когда датчик проходит над шпалой. Мне кажется интересным, что в поезде Discovery не используются датчики Холла или даже два ИК-датчика. Следовательно, он может определять положение/движение, но не направление.
Теперь приступим к мясу и картошке. Позиционные магниты используются каждым поездом для обеспечения движения, потому что внутренними электромагнитами можно управлять с помощью электроники, чтобы поезд отталкивался от идентичного полюса или тянулся к противоположному полюсу.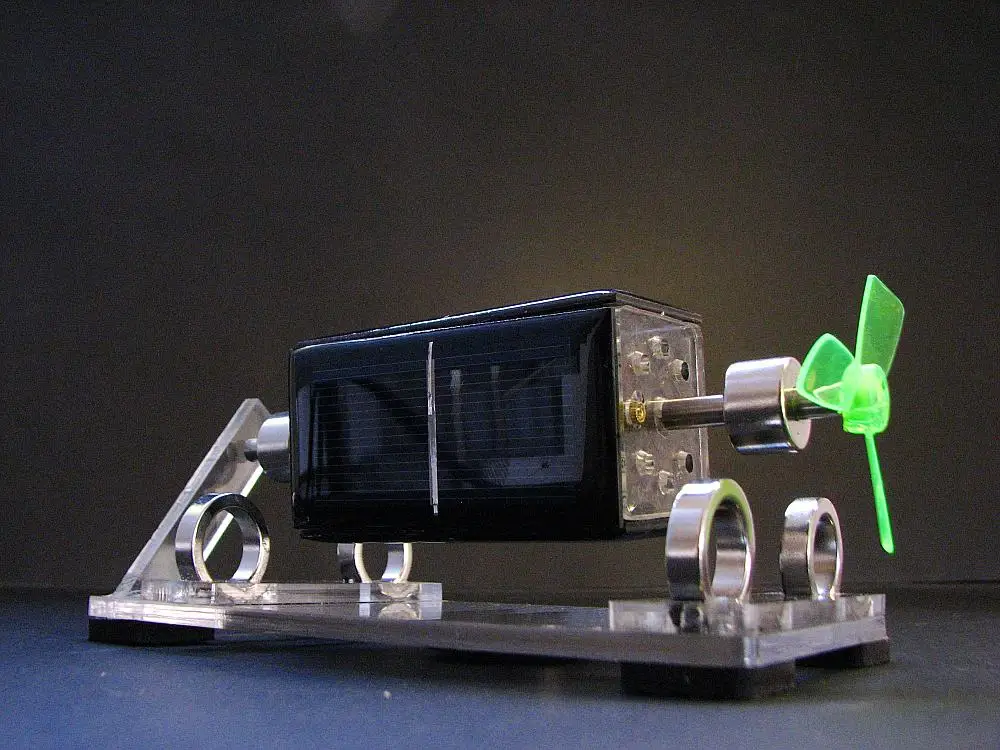 С синхронизацией, поступающей от датчиков положения, и магнетизмом, исходящим от ведомых электромагнитов, результирующая сила направлена либо вперед, либо назад из-за удерживающих колес. Начав движение, поезд продолжает двигаться в том же направлении.
С синхронизацией, поступающей от датчиков положения, и магнетизмом, исходящим от ведомых электромагнитов, результирующая сила направлена либо вперед, либо назад из-за удерживающих колес. Начав движение, поезд продолжает двигаться в том же направлении.
Хотя действующие силы одинаковы, в каждом наборе используется разный электромагнитный формат. Как показано на Рис. 6 , в поезде OWI используется одна катушка, намотанная на якорь, который обеспечивает три полюса, расположенные на стороне поезда, противоположной локационному магниту. Расстояние между полюсами составляет 0,5 дюйма и соответствует точкам N-S-N-S-N-S на настенном позиционном магните. Контроллер с одним электромагнитом имеет ограниченные возможности привода, но имеет хорошую систему датчиков.
РИСУНОК 6. Двигатель OWI имеет все детали, включая электромагнит, на печатной плате. Установлены две батареи типа АА — одна в передней и одна в задней части автомобиля.
Поезд Discovery имеет четыре электромагнита (один спрятан под печатной платой) вдоль пола локомотива ( Рисунок 7 ). Магниты расположены на расстоянии 0,5 дюйма друг от друга. Все обмотки параллельны, но сфазированы так, что находятся напротив соседей, чередующихся N-S-N-S или S-N-S-N. Они точно соответствуют полюсам позиционирующего магнита, расположенного в центре рельсового полотна. Поскольку четыре дискретных электромагнита подключены параллельно, контроллер имеет ограниченные возможности привода, а с ограниченным определением положения невозможна никакая причудливая синхронизация.
Магниты расположены на расстоянии 0,5 дюйма друг от друга. Все обмотки параллельны, но сфазированы так, что находятся напротив соседей, чередующихся N-S-N-S или S-N-S-N. Они точно соответствуют полюсам позиционирующего магнита, расположенного в центре рельсового полотна. Поскольку четыре дискретных электромагнита подключены параллельно, контроллер имеет ограниченные возможности привода, а с ограниченным определением положения невозможна никакая причудливая синхронизация.
РИСУНОК 7. Двигатель Discovery имеет крошечную печатную плату, к которой вручную подключены четыре катушки. Литий-ионный аккумулятор установлен в двигателе. Снизу открыт порт для зарядки.
CONTROL IT
Оба поезда оснащены микроконтроллерами (MCU) для управления работой. Каждый комплект имеет несколько режимов работы. В поезде Discovery используется нажимная кнопка (OFF-1-2-3-OFF) с обратной связью по миганию светодиода, а в поезде OWI используется многопозиционный ползунковый переключатель (OFF-1-2) и светодиодная обратная связь. Режимы — это просто разные моменты времени переключения электромагнитов для создания максимальной скорости поезда. Поскольку переключатель режимов — это единственный элемент управления, который пользователь имеет над любым поездом, после того, как он несколько раз проехал по кольцу, я обнаружил, что хочу большего. Что за поезд без дроссельной заслонки?
Режимы — это просто разные моменты времени переключения электромагнитов для создания максимальной скорости поезда. Поскольку переключатель режимов — это единственный элемент управления, который пользователь имеет над любым поездом, после того, как он несколько раз проехал по кольцу, я обнаружил, что хочу большего. Что за поезд без дроссельной заслонки?
Я предпочитаю набор «Дискавери», потому что он больше напоминает настоящие поезда на магнитной подвеске, которые сегодня используются ограниченно. Чтобы использовать встроенное оборудование, которое уже существует, я решил вывести датчик дорожки и соединения катушек с помощью отдельных разъемов. Поскольку я хотел, чтобы дополнительное оборудование было как можно меньше и легче, я использовал Heltec Kit 8, в котором используется ESP8266 со встроенным OLED. Чтобы не ломать существующую схему, я также добавил драйвер двигателя для электромагнитов. Схема показана на Рисунок 8 .
Первое, что вы заметите, это то, что драйвер двигателя (катушки) представляет собой двойное устройство, способное управлять двумя независимыми катушками.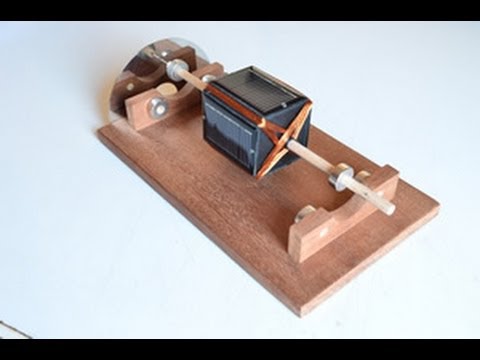 Хотя оба набора имеют один драйвер для соответствующих катушек, в наборе Discovery четыре отдельных катушки. Пары «похожих» могут управляться отдельно, что открывает путь для будущих экспериментов. Несмотря на то, что у этого MCU есть дисплей, мигающие светодиоды хороши. Помещенные на управляющие входы драйверов катушек, они позволяют видеть, как приводится в действие каждая пара катушек. Обратите внимание, что два дополнительных входа на GPIO1 и GPIO3 предназначены для контроля драйвера катушки оригинальной схемы. Наблюдение за ними позволило провести некоторую исследовательскую работу до разработки моего алгоритма.
Хотя оба набора имеют один драйвер для соответствующих катушек, в наборе Discovery четыре отдельных катушки. Пары «похожих» могут управляться отдельно, что открывает путь для будущих экспериментов. Несмотря на то, что у этого MCU есть дисплей, мигающие светодиоды хороши. Помещенные на управляющие входы драйверов катушек, они позволяют видеть, как приводится в действие каждая пара катушек. Обратите внимание, что два дополнительных входа на GPIO1 и GPIO3 предназначены для контроля драйвера катушки оригинальной схемы. Наблюдение за ними позволило провести некоторую исследовательскую работу до разработки моего алгоритма.
Поскольку схема на базе ESP8266 имеет возможности Wi-Fi, управление в виде «виртуального джойстика» может осуществляться с компьютера или смартфона. Это делается с помощью отличного сервера, который представляет элемент управления клиенту через стандартный интерфейс браузера [6]. Это в виде файла HTML и файла поддержки Java Script, которые хранятся в разделе SPIFF на ESP8266.
Эскиз Arduino для этого проекта доступен на странице кода статьи и файлов загрузки Circuit Cellar. Программа Arduino инициализирует необходимые библиотечные файлы для FS (файловой системы) и сервера Wi-Fi, а также реализует процедуру обратного вызова для получения координат X и Y виртуального джойстика [6]. Хотя я разрешаю системе входить в мою домашнюю сеть, вы можете создать собственную сеть. Я использую OLED для отображения некоторых сообщений о входе в систему и отображения его IP-адреса, когда он подключен к моей сети. Просто укажите любой браузер на этот адрес, чтобы получить пользовательский интерфейс. Фото в На рис. 9 показан экран браузера моего компьютера и поезд на магнитной подвеске с моей схемой, работающей от небольшой литий-ионной батареи. Обратите внимание, что положение джойстика Y-Y в браузере отображается на OLED!
— РЕКЛАМА—
—Реклама здесь—
РИСУНОК 9. Предоставляется файл сценария Java, который позволяет любому браузеру отображать виртуальный джойстик, когда вы щелкаете и перетаскиваете мышь. Координаты X и Y отправляются обратно в комплект Heltec Kit 8. Координата X (0-100) используется для определения времени замены электромагнитов. Это позволяет двигателю изменять скорость. С полюсами, расположенными на расстоянии 0,5 дюйма, максимальная скорость составляет 5 дюймов в секунду.
Координаты X и Y отправляются обратно в комплект Heltec Kit 8. Координата X (0-100) используется для определения времени замены электромагнитов. Это позволяет двигателю изменять скорость. С полюсами, расположенными на расстоянии 0,5 дюйма, максимальная скорость составляет 5 дюймов в секунду.
Хотя у меня есть доступ к значениям x и y в программе Arduino, только x используется в качестве дросселя для этого проекта. Так как же это значение превращается в выходной сигнал привода катушки? Начнем с микросхемы драйвера катушки. Я использовал модуль Pololu DRV8835 Dual Motor Driver Carrier из-за его размера и номинального тока менее 1 А. Он плотно помещается между двухрядными разъемами платы Heltec ESP8266. Каждый канал имеет два входа: фаза (1) и активация (2). Я использовал направление (или фазу) для ввода 1 и ШИМ (или включить) на вход 2 . Направление определяет полярность выхода , а ШИМ определяет, как долго этот выход остается включенным или активным. На данный момент мы просто пытаемся эмулировать исходные операции, поэтому ON будет 100%. Управление дроссельной заслонкой фактически изменит скорость смены полюсов, а не ШИМ, который был бы средним током или магнитной силой катушки.
Управление дроссельной заслонкой фактически изменит скорость смены полюсов, а не ШИМ, который был бы средним током или магнитной силой катушки.
Время основного контура определяет, как часто меняется фаза на катушках. Время 1000 – (abs(x) * 9) РС. Поскольку джойстик будет возвращать x от 0 до 100 (процентов) для перемещения вправо, время может варьироваться от 1000 мс (1000 – (0 × 9)) до 100 мс (1000 – (100 × 9)). В этом цикле, если x =0, мы вызываем noGo(), иначе мы вызываем go(). noGo() устанавливает ШИМ в 0, что останавливает любой привод к катушкам. Как только джойстик перемещается от 0, используется подпрограмма go() . Это устанавливает максимальное значение ШИМ 1023 и позволяет подавать на катушки полную мощность. В этом, самом простом варианте, датчик вообще не используется.
PUSH COMES TO PHOVE
Это бросок монеты, будет ли любой из этих наборов действительно двигаться, когда подается ток, и они находятся в состоянии покоя (не движутся). Без какого-либо внешнего вмешательства, такого как толчок, они могут быть счастливы просто немного подпрыгнуть вверх и вниз. Комплект OWI с одной катушкой не имеет шансов сойти с полюса, если он размещен непосредственно на нем. Хотя в наборе Discovery есть несколько катушек, они соединены вместе, и результаты одинаковы. Однако их можно легко разделить, а затем управлять с помощью двойных драйверов этого проекта. У нас есть то, что необходимо для достижения гарантированного движения из стационарного состояния.
Без какого-либо внешнего вмешательства, такого как толчок, они могут быть счастливы просто немного подпрыгнуть вверх и вниз. Комплект OWI с одной катушкой не имеет шансов сойти с полюса, если он размещен непосредственно на нем. Хотя в наборе Discovery есть несколько катушек, они соединены вместе, и результаты одинаковы. Однако их можно легко разделить, а затем управлять с помощью двойных драйверов этого проекта. У нас есть то, что необходимо для достижения гарантированного движения из стационарного состояния.
Несколько замечаний по этим наборам. Комплект OWI (eBay), похоже, поддерживается производителем. Инструкции дополнены формой заказа со списком деталей, включая цены. В наборе «Дискавери» были инструкции и все, никакой контактной информации. На самом деле я купил его в сувенирном магазине Генри Форда, но на коробке была наклейка универмага Коля, и она больше не продается ни одной из компаний. Недавно я нашел новую версию набора Discovery для продажи на веб-сайте FAO Schwartz за 35 долларов [7].
И последнее, я читал обзоры обоих наборов, и мало кто мог сказать что-то хорошее. Я подозреваю, что это из-за клея на магнитных полосах. Просто не держит. Это очень расстраивало, потому что магниты постоянно падали или поднимались вверх, из-за чего поезд сходил с рельсов. После того, как я понял, что могу приклеить их навсегда с помощью суперклея, все наладилось. Интересно, что у обоих наборов были одинаковые проблемы. Решение было простым — я использовал суперклей, который поставляется в бутылке с маленькой кистью. Я также приклеил пластиковые детали поезда, так как они собирались вместе, и при длительном манипулировании детали, как правило, раскручивались сами по себе.
Мои дети уже взрослые, у каждого (кроме одного) есть своя семья, и, имея много внуков, я постоянно сталкиваюсь с последними гаджетами, когда навещаю их. Каждый раз, когда я достаю отвертку Leatherman, я ловлю на себе грязные взгляды этих детишек. Они знают, что должно произойти. Слишком многому нужно научиться, так мало времени.
РЕСУРСЫ
Каталожные номера:
[1] Видео: Как сделать простой мотор:
[2] Серия статей из трех частей: «Электронная регулировка скорости» в
Circuit Cellar 336, июль 2018 г.
Circuit Cellar 337, август 2018 г.
Circuit Cellar 338, сентябрь 2018 г. -rc-cars
[4] Рисунок 2 https://en.wikipedia.org/wiki/Linear_motor
[5] «Как бросить вызов гравитации без использования черной магии» ( Circuit Cellar 18, декабрь 1990 г./январь 1991)
[6] виртуальный джойстик
[7] https://faoschwarz.com/products/do-it-yourself-Magnetic-Levitation-Train
Espressif Systems | www.