Содержание
что это такое и как найти
Скольжение – это одна из основных характеристик электродвигателя. Она изменяется в зависимости от режима работы, нагрузки на валу и питающего напряжения. Давайте подробнее разберемся, что такое скольжение электродвигателя, от чего оно зависит и как определяется.
- Что это такое
- Величина скольжения в разных режимах работы
- Способы измерения
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
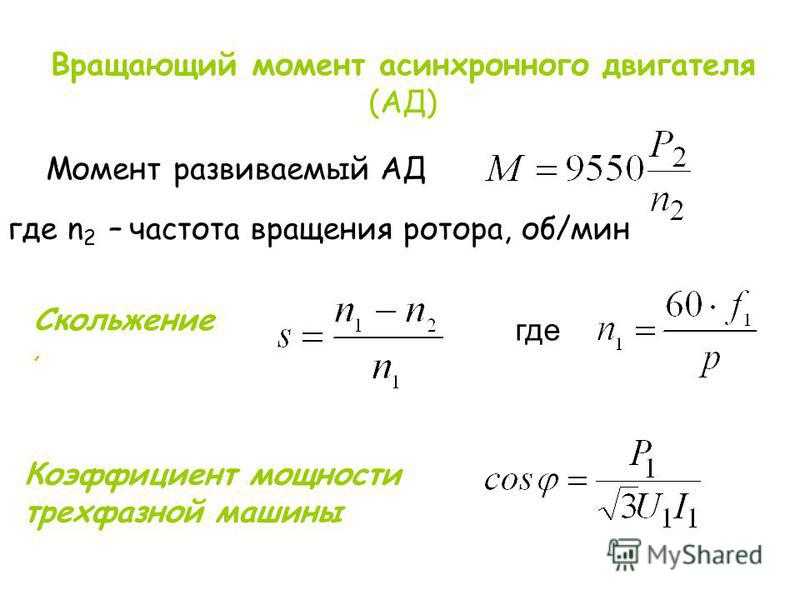
Высчитывается она по формуле:
где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞<S<0.
Также существует режим электромагнитного торможения (противовключения ротора), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
f2=S*f1,
где f1 – частота тока, подаваемого на обмотки статора, а S — скольжение.
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Вращающий момент электродвигателя зависит от величины S, так как определяется значениями величин магнитного потока, тока, углом сдвига между ЭДС и током ротора.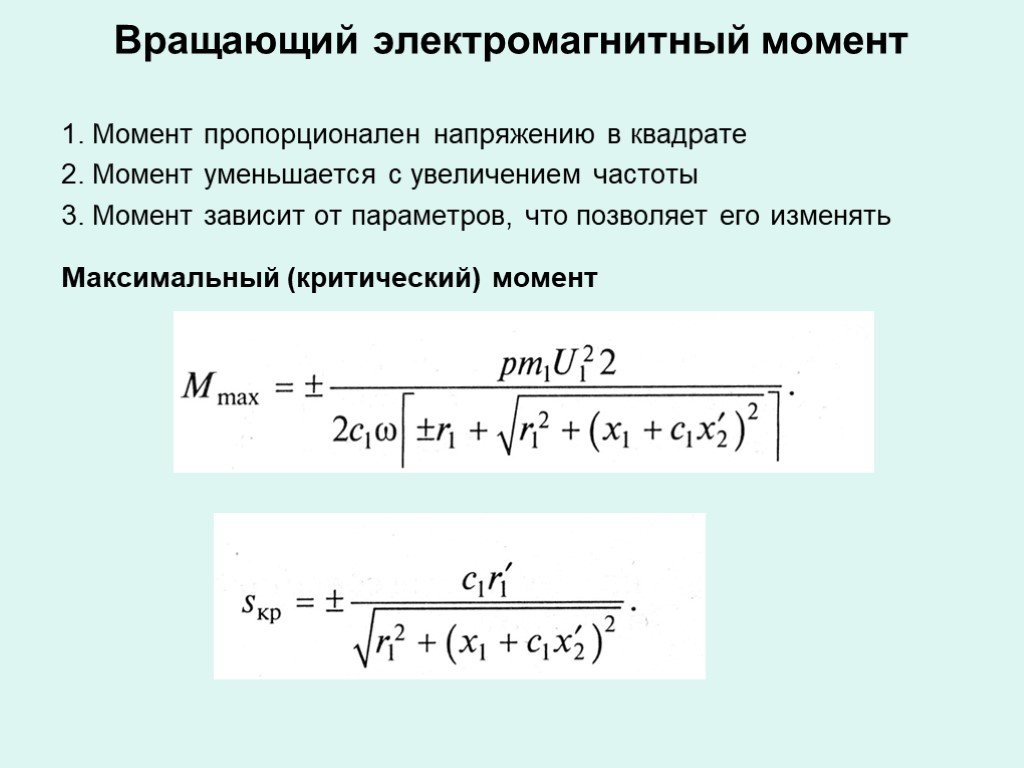
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.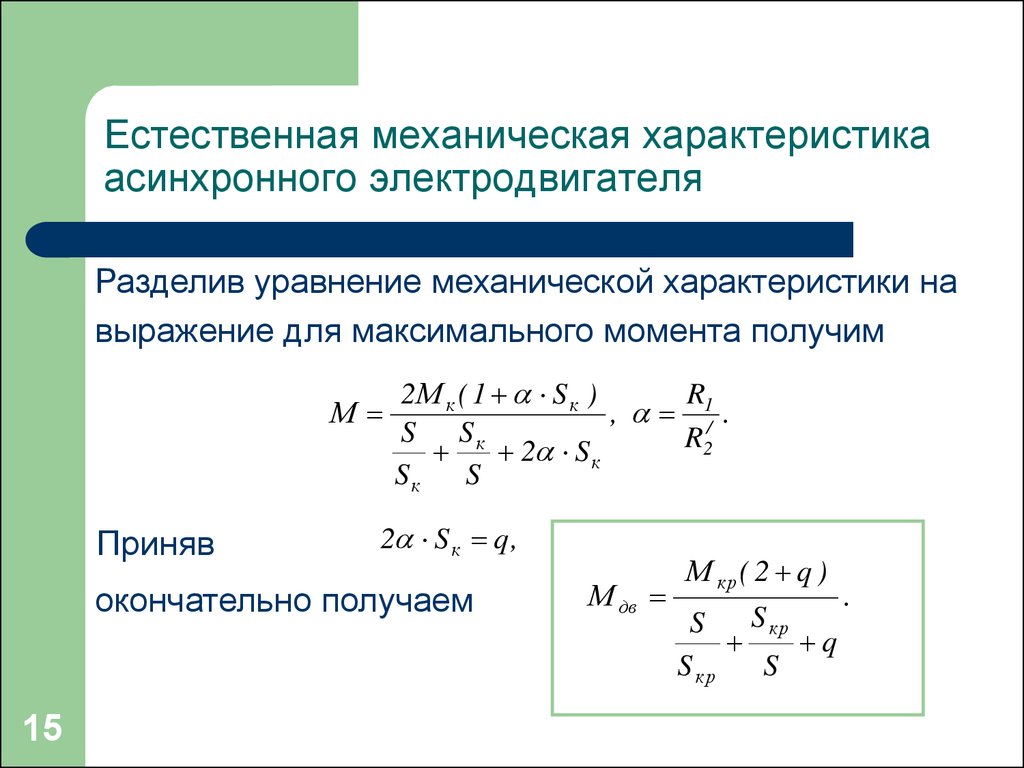
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:
где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.
Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Виды испытаний асинхронных двигателей
- Правила определения фазы, нуля и заземления в сети
- Как выбрать мультиметр для дома и работы
Критическое скольжение — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
Рабочие характеристики. механические ( а и напряжения статора ( 5 АД типа 4А132М6 в режиме i / 0.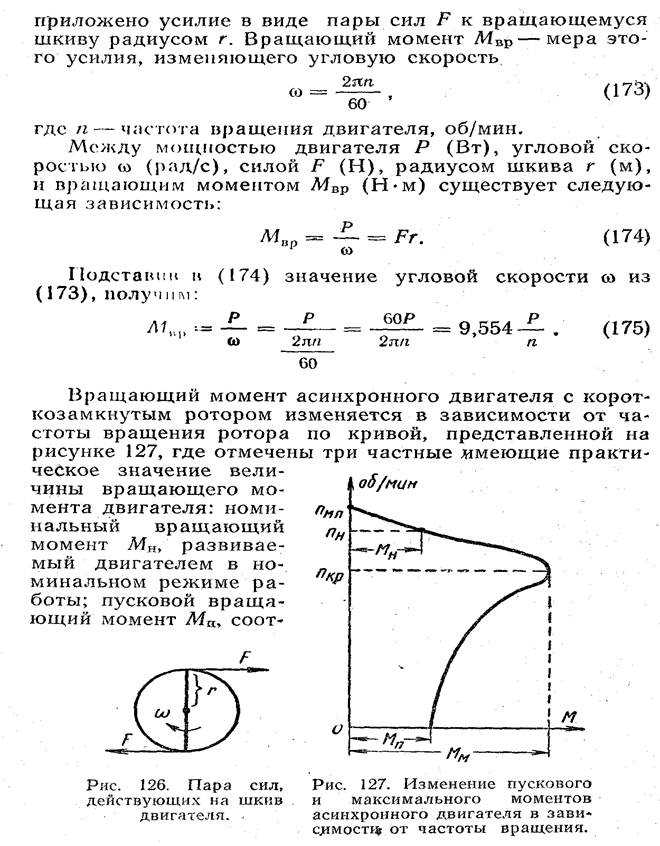 VOHOM — 1. VOHOM — 1.
[1] |
Критическое скольжение в рассматриваемом режиме зависит только от активного сопротивления и индуктивности рассеяния обмотки ротора, а критический электромагнитный момент определяется величиной главного потокосцепления и значением индуктивности рассеяния обмотки ротора.
[2]
| Механические характеристики асинхронного электродвигателя при изменении приложенного напряжения.| Механические характеристики асинхронного электродвигателя при регулировании частоты вращения изменением частоты тока.
[3] |
Критическое скольжение будет изменяться обратно пропорционально частоте, а критический момент — обратно пропорционально квадрату частоты. В обычных условиях эксплуатации частота питающей сети бывает постоянной или меняется в очень малых пределах. Однако на буровых установках нефтяных промыслов при питании электродвигателей от дизель-электрического агрегата двигатель может работать с частотой, отличной от частоты, на которую он рассчитан. Например, так работают электродвигатели, подключаемые к аварийной ДЭС буровой установки при отсутствии напряжения в сети, снабжающей электроэнергией буровую установку. В подобных случаях следует учитывать резкое уменьшение критического момента с увеличением частоты питающего тока, что ограничивает перегрузочную способность двигателя, и принимать необходимые меры.
Например, так работают электродвигатели, подключаемые к аварийной ДЭС буровой установки при отсутствии напряжения в сети, снабжающей электроэнергией буровую установку. В подобных случаях следует учитывать резкое уменьшение критического момента с увеличением частоты питающего тока, что ограничивает перегрузочную способность двигателя, и принимать необходимые меры.
[4]
Критическое скольжение, не зависящее от напряжения, остается неизменным. Не изменяется также и синхронная угловая скорость, которая зависит только от частоты питающего напряжения и числа пар полюсов двигателя.
[5]
| Схемы включения обмоток статора при динамическом торможении.| Схема включения асинхронного двигателя при динамическом торможении с питанием статора через полупроводниковый выпрямитель.
[6] |
Критическое скольжение зависит от сопротивления, включенного в ротор. Оно увеличивается пропорционально росту сопротивления.
[7]
Критическое скольжение, как нетрудно установить из выражения ( 3 — 51), уменьшается с ростом частоты, а с уменьшением ее растет. При достаточно низких значениях частоты оно от частоты мало зависит.
[8]
Критическое скольжение ротора sKp при отсутствии добавочного активного сопротивления в цепи его обмоток может быть найдено из упрощенной формулы Клосса.
[9]
Критическое скольжение SKV r ly 2 — j — от напряжения не зависит.
[10]
Критическое скольжение асинхронной машины — — скольжение, при котором машина развивает максимальный вращающий момент.
[11]
Критическое скольжение асинхронной машины — скольжение, при котором асинхронная машина развивает максимальный вращающий момент.
[12]
Переходный процесс пуска асинхронного двигателя при холостом ходе.| Средний момент двигателя и относительное время пуска а функции критического скольжения.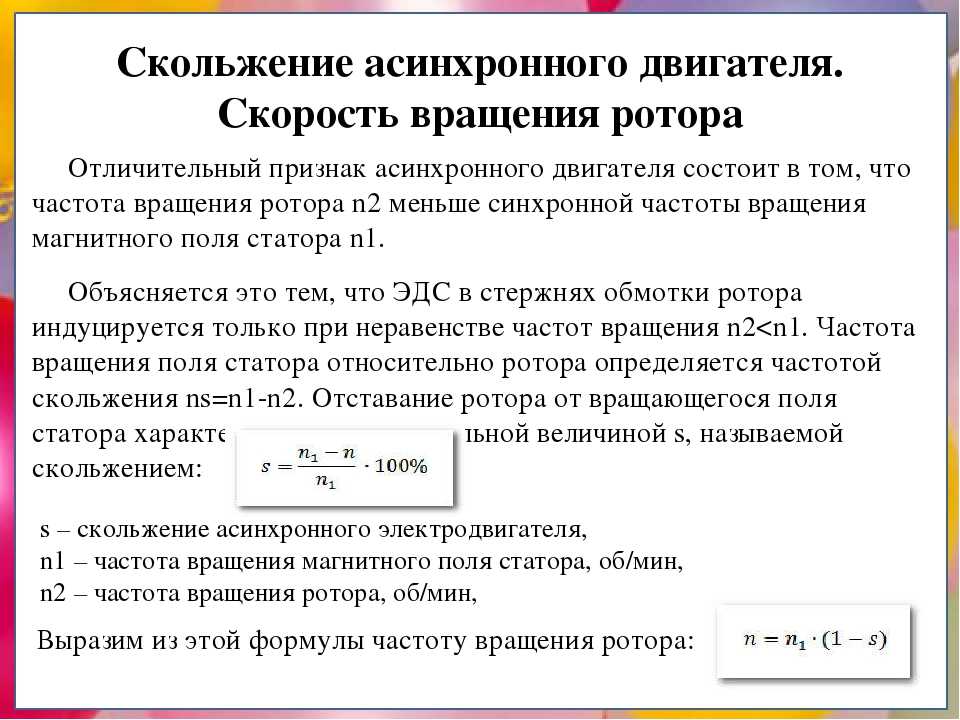
[13] |
Критическое скольжение асинхронного двигателя зависит от сопротивления цепи ротора. Поэтому величина относительной продолжительности пуска прямо пропорциональна сопротивлению.
[14]
Вблизи критического скольжения апериодический процесс сменяется колебательным. При этом время процесса растет по мере роста абсолютной величины скольжения с соответствующим увеличением числа периодов колебания.
[15]
Страницы:
1
2
3
4
что это такое и как его найти
Скольжение — одна из основных характеристик электродвигателя. Оно меняется в зависимости от режима работы, нагрузки на вал и напряжения питания. Рассмотрим подробнее, что такое пробуксовка мотора, от чего она зависит и как определяется.
- Что это такое
- Величина проскальзывания в разных режимах работы
- Методы измерения
Что это такое
Трехфазный принцип работы асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, создающее магнитный поток, в каждой фазе он будет сдвинут на 120 градусов. В этом случае суммирующий магнитный поток будет вращающимся.
На обмотку статора подается питающее напряжение, создающее магнитный поток, в каждой фазе он будет сдвинут на 120 градусов. В этом случае суммирующий магнитный поток будет вращающимся.
Обмотка ротора представляет собой замкнутый контур, в ней наводится ЭДС и возникающий магнитный поток вращает ротор в направлении движения магнитного потока статора. Вращающийся электромагнитный момент пытается уравновесить скорость вращения магнитных полей статора и ротора.
Величина, определяющая разницу скоростей вращения магнитных полей ротора и статора, называется скольжением . Поскольку ротор асинхронного двигателя всегда вращается медленнее, чем поле статора, оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Рассчитывается по формуле:
где n 1 — частота вращения магнитного поля, n 2 — частота вращения магнитного поля ротора.
Скольжение — важная характеристика, характеризующая нормальную работу асинхронного двигателя.
Величина проскальзывания в различных режимах работы
В режиме холостого хода пробуксовка близка к нулю и составляет 2-3%, в связи с тем, что n 1 практически равно n 2 . Оно не может быть равно нулю, так как в этом случае поле статора не пересекается с полем ротора, проще говоря, двигатель не вращается и питающее его напряжение не подается.
Даже в режиме идеального холостого хода значение проскальзывания, выраженное в процентах, не будет равно нулю. S также может принимать отрицательные значения в том случае, когда электродвигатель находится в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ДЭ будет в значениях -∞
Так же есть режим электромагнитного торможения (ротор против часовой стрелки), в этом режиме скольжение принимает значение больше единицы, со знаком плюс.
Значение частоты тока в обмотках ротора равно частоте тока сети только в момент пуска. При номинальной нагрузке частота тока будет определяться по формуле:
При номинальной нагрузке частота тока будет определяться по формуле:
f 2 = S * f 1 ,
где f 1 — частота тока, подводимого к обмоткам статора, а S это скольжение.
Частота тока ротора прямо пропорциональна его индуктивному сопротивлению. Таким образом, проявляется зависимость тока в роторе от скольжения АД. Крутящий момент электродвигателя зависит от величины S, так как определяется значениями магнитного потока, тока, угла сдвига между ЭДС и током ротора.
Поэтому для детального изучения характеристики АД установлена зависимость, представленная на рисунке выше. Таким образом, изменением момента (при разных значениях скольжения) в двигателе с фазным ротором можно управлять, вводя сопротивление в цепь обмоток ротора. В двигателях с короткозамкнутым ротором крутящий момент регулируется либо преобразователями частоты, либо двигателями с регулируемой скоростью.
При номинальной нагрузке двигателя значение скольжения будет находиться в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
С увеличением нагрузки на вал (момент на валу) скольжение будет усиливаться, проще говоря, магнитное поле ротора будет все больше отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально возрастет крутящий момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают увеличение силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине проскальзывания момент достигнет своего максимального значения, затем начнет уменьшаться. Значение, при котором момент будет максимальным, называется критическим (Sкр).
В графическом виде механическая характеристика асинхронного двигателя может быть выражена по формуле Клосса:
где, М — — Это критический момент, который определяется критическим скольжением электродвигателя .
График основан на характеристиках, указанных в паспорте АД. Если есть вопросы по приводу, то данный график используется как движитель с использованием асинхронного электродвигателя.
Если есть вопросы по приводу, то данный график используется как движитель с использованием асинхронного электродвигателя.
Критический момент определяет значение допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит так называемое опрокидывание электродвигателя и двигатель останавливается. Опрокидывание – один из аварийных режимов.
Методы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного к валу ЭД.
Вариант измерения стробоскопическим методом с использованием неоновой лампы подходит для значения скольжения не более 5%. Для этого либо на вал двигателя наносится мелом спецпримета, либо устанавливается специальный стробоскопический диск. Они подсвечиваются неоновой лампой, и за определенное время подсчитывается оборот, затем по специальным формулам производится расчет. Также возможно использование полноценного стробоскопа, подобного тому, что показано ниже.
Также возможно использование полноценного стробоскопа, подобного тому, что показано ниже.
Также для измерения величины проскальзывания всех типов машин подходит метод индукционной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (их 10-20 тысяч) число витков должно быть не менее 3000. Катушка с подключенным к ней чувствительным милливольтметром размещается на конец вала ротора. По отклонениям стрелок прибора (количеству колебаний) за определенное время рассчитывают величину скольжения по формуле. Кроме того, для асинхронного двигателя с фазным ротором скольжение можно измерить с помощью магнитоэлектрического амперметра. Амперметр подключают к одной из фаз ротора и вычисляют число отклонений стрелки амперметра (по формуле из метода с индуктивной катушкой).
Вот мы и рассмотрели, что такое пробуксовка асинхронного двигателя и как ее определить.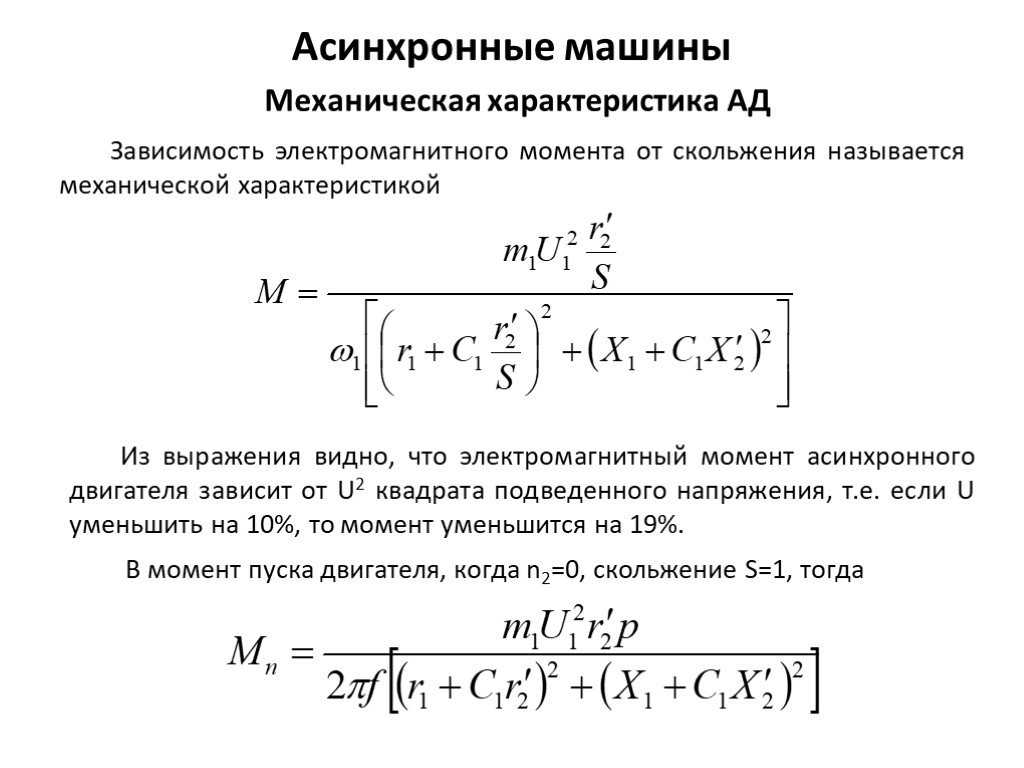 Если у вас есть вопросы, задавайте их в комментариях под статьей!
Если у вас есть вопросы, задавайте их в комментариях под статьей!
Сопутствующие материалы:
- Типы испытаний асинхронных двигателей
- Правила определения фазы, нуля и заземления в сети
- Как выбрать мультиметр для дома и работы
Опубликовано:
Обновлено: 16.09.2019
Пока без коментариев
Почему пробуксовка асинхронного двигателя важна
Дэвид Мэнни
Дэвид Мэнни
Контент-маркетинг | SEO | СЭМ | Входящий маркетолог | Рассказчик
Опубликовано 18 февраля 2016 г.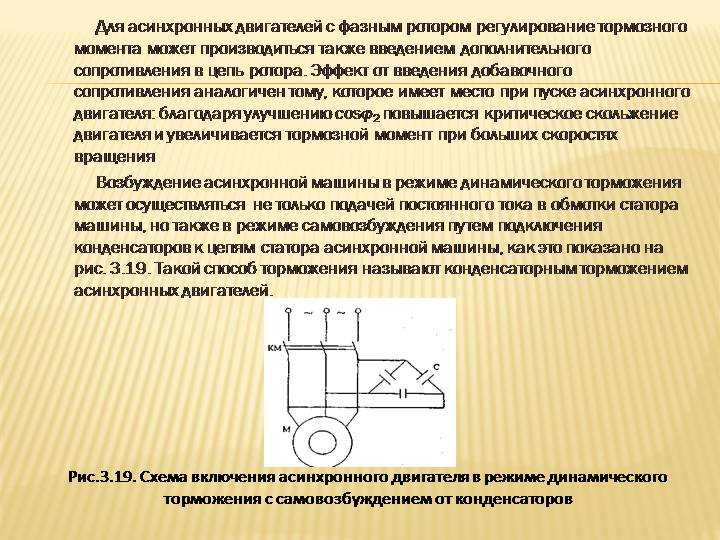
+ Подписаться
Статор и ротор являются двумя основными компонентами асинхронного двигателя переменного тока. Крутящий момент создается двумя способами: через магнитное поле статора и ток в двух стержнях, соединенных с ротором. При работе асинхронного двигателя переменного тока скорость магнитного поля становится меньше по сравнению со скоростью вращения ротора. Единственным средством создания большего крутящего момента является то, что вращение приводит к расслоению магнитного поля, которое вызывается стержнями ротора.
Проскальзывание асинхронного двигателя — это разница между скоростью двигателя при полной нагрузке и синхронной скоростью. Процентное скольжение — это метод расчета производительности электродвигателя. Чтобы получить полезный крутящий момент, который постоянно увеличивается с увеличением нагрузки, необходимо проскальзывание двигателя.
Некоторые параметры, связанные с работой двигателя, влияют на скольжение двигателя. Кроме того, скольжение зависит от такой же пропорции, как частота напряжения статора, сопротивление ротора и момент нагрузки. Когда вы увеличиваете скольжение, можно контролировать скорость асинхронного двигателя. Другой способ — когда цепь ротора подвергается более высокому сопротивлению. Как правило, двигатели с меньшей мощностью, естественно, имеют гораздо большее скольжение, чем двигатели с высокой мощностью. Причина этого в том, что в обмотке ротора легче создать большее сопротивление в случае небольших двигателей.
Кроме того, скольжение зависит от такой же пропорции, как частота напряжения статора, сопротивление ротора и момент нагрузки. Когда вы увеличиваете скольжение, можно контролировать скорость асинхронного двигателя. Другой способ — когда цепь ротора подвергается более высокому сопротивлению. Как правило, двигатели с меньшей мощностью, естественно, имеют гораздо большее скольжение, чем двигатели с высокой мощностью. Причина этого в том, что в обмотке ротора легче создать большее сопротивление в случае небольших двигателей.
В начале вращения двигателя скольжение составляет 100 процентов напряжения на максимальном уровне. Это типичные сценарии скольжения асинхронного двигателя. Однако при вращении ротора происходит снижение напряжения и скольжение. Поскольку частота пропорциональна скольжению, уменьшение скольжения вызывается уменьшением частоты. Более того, скольжение и частота являются факторами, влияющими на индуктивное сопротивление асинхронного двигателя. Максимальный уровень индуктивного сопротивления, скольжения и частоты достигается, когда ротор находится в стационарном состоянии. При этом коэффициент мощности снижается до 1, и наблюдается постоянный низкий уровень индуктивного сопротивления.
При этом коэффициент мощности снижается до 1, и наблюдается постоянный низкий уровень индуктивного сопротивления.
Постоянное увеличение скорости двигателя вызывает уменьшение индуктивной реакции, которая в конечном итоге становится эквивалентной сопротивлению. Только когда двигатель начинает вращаться, импеданс является индуктивным, а индуктивное реактивное сопротивление высоким. Учитывая тот факт, что скольжение никогда не достигает 0, оно остается способным эффективно управлять ротором асинхронных двигателей. Любая сила, существующая между статором и ротором, является результатом нулевого скольжения, что в дальнейшем приводит к тому, что ротор останавливает свое вращение, а статор достигает 0. Скольжение также становится эффективным, когда между статором и ротором образуется притяжение. .
Пять причин, по которым производители должны быть благодарны в этот День Благодарения!
22 ноября 2022 г.

Непрерывное совершенствование имеет решающее значение, особенно в странах с развивающейся нестабильной экономикой!
3 ноября 2022 г.
Что беспокоит производство в США? Ничего, Просто Водоворот.
26 октября 2022 г.
Означают ли производственные роботы и автоматизация конец рабочей недели?
20 октября 2022 г.
Молодые люди — это решение, но кому из них это небезразлично?
6 октября 2022 г.
Размышление о разрушении ржавчины с использованием процесса E-Coat/Topcoat
28 сентября 2022 г.
Скрытые преимущества профессионального обучения, предоставляемого компанией
22 сент. 2022 г.
Прямой толчок производства к автоматизации огромен, но впереди нас ждут новые опасности.
13 сентября 2022 г.
Критический рост женщин в производстве
7 сентября 2022 г.