Содержание
Контроллер управления шаговым двигателем
Что такое шаговый двигатель, и зачем он нужен?
Шаговый двигатель – это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Так, пожалуй, можно дать строгое определение. Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов (рис. 1).
Рис. 1. Внешний вид шаговых двигателей семейства ДШИ-200.
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми.
Чем же хорош шаговый двигатель?
-
угол поворота ротора определяется числом импульсов, которые поданы на двигатель -
двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны) -
прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
-
возможность быстрого старта/остановки/реверсирования -
высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников -
однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи -
возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора -
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Но не все так хорошо. ..
..
-
шаговым двигателем присуще явление резонанса -
возможна потеря контроля положения ввиду работы без обратной связи -
потребление энергии не уменьшается даже без нагрузки -
затруднена работа на высоких скоростях -
невысокая удельная мощность -
относительно сложная схема управления
Что выбрать?
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях. По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит. В отличие от коллекторных двигателей, у котрых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт.
Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей
Существуют три основных типа шаговых двигателей:
-
двигатели с переменным магнитным сопротивлением -
двигатели с постоянными магнитами -
гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Двигатели с переменным магнитным сопротивлением
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 2). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имет шаг 30 град.
Такой двигатель имет шаг 30 град.
Рис. 2. Двигатель с переменным магнитным сопротивлением.
При включени тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель не чувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 3). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Рис. 3. Двигатель с постоянными магнитами.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
Разрез реального шагового двигателя с постоянными магнитами показан на рис. 4.
Рис. 4. Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 5).
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 5).
Рис. 5. Гибридный двигатель.
Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph*Ph) = 360/N,
где Nph – чило эквивалентных полюсов на фазу = число полюсов ротора,
Ph – число фаз,
N — полное количество полюсов для всех фаз вместе.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1. 8 град.
8 град.
Продольное сечение гибридного шагового двигателя показано на рис. 6. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Рис. 6. Продольный разрез гибридного шагового двигателя.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно.
Большинство современных шаговых двигателей являются гибридными. По сути гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6 грд или 1.8 грд. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).
Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Биполярный или униполярный?
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями.
Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
Диаграммы, диаграммы…
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис 8а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.
Рис. 8. Различные способы управления фазами шагового двигателя.
Второй способ — управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 8б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
Держи его!
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда в остановленном состоянии двигатель должен обеспечивать полный момент, что для шагового двигателя возможно. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Поскольку современные драйверы позволяют регулировать ток питания обмоток двигателя, задание необходимого тока удержания обычно не представляет проблем. Задача обычно заключается просто в соответствующей программной поддержке для управляющего микроконтроллера.
Микрошаговый режим
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Рис. 12. Зависимость момента от угла поворота ротора в случае разных значений тока фаз.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 12), то результирующий момент будет
Th = ( a2 + b2 )0.
а точка равновесия ротора сместится в точку
x = ( S / (pi/2) ) arctan( b / a ),
где a и b – момент, создаваемый первой и второй фазой соответственно,
Th – результирующий момент удержания,
x – положение равновесия ротора в радианах,
S – угол шага в радианах.
 5,
5,
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
Ещё раз нужно отметить, что приведенные выше формулы верны только в том случае, если зависимость момента от угла поворота ротора синусоидальная и если ни одна часть магнитной цепи двигателя не насыщается.
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 град.
Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 град.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах. На частотах в 2 – 3 раза выше собственной резонансной частоты ротора и нагрузки, микрошаговый режим дает незначительные преимущества по сравнению с полу- или полношаговым режимами. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Система с шаговым двигателем работает подобно фильтру нижних частот. В микрошаговом режиме можно осуществлять только разгон и торможение, а основное время работать в полношаговом режиме. К тому же, для достижения высоких скоростей в микрошаговом режиме требуется очень высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Для предотвращения переходных процессов и потери шагов, переключения режимов работы двигателя (из микрошагового режима в полношаговый и т.п.) необходимо производить в те моменты, когда ротор находится в положении, соответствующем одной включенной фазе. Некоторые микросхемы драйверов микрошагового режима имеют специальный сигнал, который информирует о таком положении ротора. Например, это драйвер A3955 фирмы Allegro.
Некоторые микросхемы драйверов микрошагового режима имеют специальный сигнал, который информирует о таком положении ротора. Например, это драйвер A3955 фирмы Allegro.
Во многих приложениях, где требуются малые относительные перемещения и высокая разрешающая способность, микрошаговый режим способен заменить механический редуктор. Часто простота системы является решающим фактором, даже если при этом придется применить двигатель больших габаритов. Несмотря на то, что драйвер, обеспечивающий микрошаговый режим, намного сложнее обычного драйвера, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель, плюс редуктор. Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров. Это позволяет сделать практически одинаковой стоимость оборудования для полношагового и микрошагового режимов.
Иногда микрошаговый режим используется для увеличения точности величины шага сверх заявленной производителем двигателя. При этом используется номинальное число шагов. Для повышения точности используется коррекция положения ротора в точках равн
При этом используется номинальное число шагов. Для повышения точности используется коррекция положения ротора в точках равн
Конструкция некоторых двигателей оптимизирована для наилучшей точности в полношаговом режиме и максимального момента удержания. Специальная форма зубцов ротора и статора спроектирована так, чтобы в положении равновесия для полношагового режима магнитный поток сильно возростал. Это приводит к ухудшению точности в микрошаговом режиме. Лучшие результаты позволяют получить двигатели, у которых момент удержания в обесточенном состоянии меньше.
Отклонения можно разделить на два вида: отклонения величины магнитного поля, которые приводят к отклонениям момента удержания в микрошаговом режиме и отклонения направления магнитного поля, которые приводят к отклонениям положения равновесия. Отклонения момента удержания в микрошаговом режиме обычно составляют 10 – 30% от максимального момента. Нужно сказать, что и в полношаговом режиме момент удержания может колебаться на 10 – 20 % вследствие искажений геометрии ротора и статора.
Если измерить положения равновесия ротора при вращении двигателя по и против часовой стрелки, то получатся несколько разные результаты. Этот гистерезис связан в первую очередь с магнитным гистерезисом материала сердечника, хотя свой вклад вносит и трение. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. Погрешность, создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в высокоточных приложениях при движении в одном из направлений нужно проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к нужной позиции всегда осуществлялся в одном направлении.
Вполне естественно, что любое желаемое увеличение разрешающей способности наталкивается на какие-то физические ограничения. Не стоит думать, что точность позиционирования для 7.2 град. двигателя в микрошаговом режиме не уступает точности 1.8 град. двигателя.
Препятствием являются следующие физические ограничения:
- нарастание момента в зависимости от угла поворота у 7. 2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже
- как будет показано ниже, если в системе есть трение, то вследствие появления мертвых зон точность позиционирования будет ограничена
- большинство коммерческих двигателей не обладают прецизионной конструкцией и зависимость между моментом и углом поворота ротора не является в точности синусоидальной. Вследствие этого зависимость между фазой синусоидального тока питания и углом поворота вала будет нелинейной. В результате ротор двигателя будет точно проходить положения каждого шага и полушага, а между этими положениями будут наблюдаться довольно значительные отклонения
 2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже
2 градусного двигателя в четыре раза более пологое, чем у настоящего 1.8-градусного двигателя. Вследствие действия момента трения или момента инерции нагрузки точность позиционирования уже будет хуже
Эти проблемы наиболее ярко выражены для двигателей с большим количеством полюсов. Существуют однако двигатели, ещё на этапе разработки оптимизированные для работы в микрошаговом режиме. Полюса ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов.
Полюса ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов.
Еще один источник погрешностей позиционирования – это ошибка квантования ЦАП, с помощью которого формируются токи фаз. Дело в том, что ток должен формироваться по синусоидальному закону, поэтому для минимизации погрешности линейный ЦАП должен иметь повышенную разрядность. Существуют специализированные драйверы со встроенным нелинейным ЦАПом, который позволяет сразу получать осчеты функции sin. Примером может служить драйвер A3955 фирмы Allegro, который имеет встроенный 3-х разрядный ЦАП, который обеспечивает следующие значения тока фаз: 100%, 92.4%, 83.1%, 70.7%, 55.5%, 38.2%, 19.5%, 0%. Это позволяет работать в микрошаговом режиме с величиной шага 1/8, при этом погрешность установки тока фаз не превышает 2%. Кроме того, этот драйвер имеет возможность управлять скоростью спада тока обмоток двигателя во время работы, что позволяет произвести «тонкую подстройку» драйвера под конкретный двигатель для получения наименьшей погрешности позиционирования.
Даже если ЦАП точно сформировал синусоидальное опорное напряжение, его нужно усилить и превратить в синусоидальный ток обмоток. Многие драйверы имеют значительную нелинейность вблизи нулевого значения тока, что вызывает значительные искажения формы и, как следствие, значительные ошибки позиционирования. Если используются высококачественные драйверы, например PBM3960 и PBL3771 фирмы Ericsson, погрешность, связанная с драйвером исчезающе мала по сравнению с погрешностью двигателя.
Иногда контроллеры шаговых двигателей позволяют корректировать форму выходного сигнала путем добавления или вычитания из синуса его третьей гармоники. Однако такая подстройка должна производится индивидуально под конкретный двигатель, характеристики которого должны быть перед этим измерены.
Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения (особенно на очень низких скоростях), для устранения шума и явления резонанса. Микрошаговый режим также способен уменьшить время установления механической системы, так как в отличие от полношагового режима отсутствуют выбросы и осцилляции. Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позицианирования в микрошаговом режиме.
Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позицианирования в микрошаговом режиме.
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. Некоторые из них, например A3955, A3957 фирмы Allegro, уже содержат ЦАП и требуют о микроконтроллера только цифровых кодов. Другие же, такие как L6506, L298 фирмы SGS-Thomson, требуют внешних опорных напряжений синусоидальной формы, которые должен формировать микроконтроллер с помощью ЦАПов. Нужно сказать, что слишком большое количество дискретов синуса не приводит к повышению точности позиционирования, так как начинает доминировать ошибка, связанная с неидеальностью геометрии полюсов двигателя. Тем более, в этом случае отсчеты должны следовать с большой частотой, что является проблемой при их программном формировании. При работе на больших скоростях разрешающую способность ЦАПов можно уменьшить. Более того, при очень больших скоростях вообще рекомендуется работать в обычном полношаговом режиме, так как управление гармоническим сигналом теряет преимущества.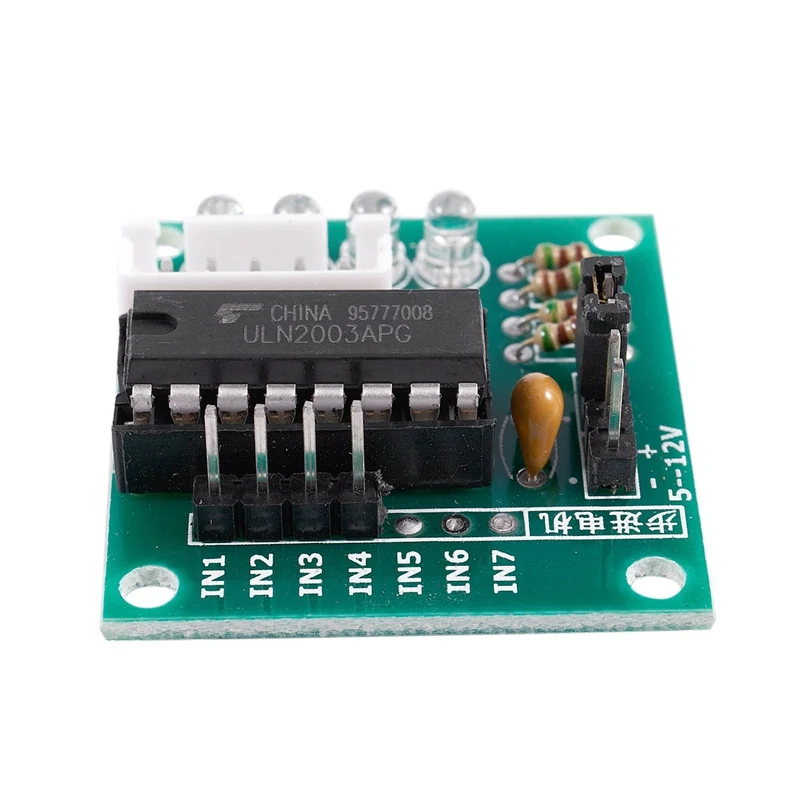 Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
Зависимость момента от скорости, влияние нагрузки
Момент, создаваемый шаговым двигателем, зависит от нескольких факторов:
- скорости
- тока в обмотках
- схемы драйвера
На рис. 14а показана зависимость момента от угла поворота ротора.
Рис. 14. Возникновение мертвых зон в результате действия трения.
У идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
Ф = (N/(2*pi))*sin(Ta/Th),
где Ф – угловое смещение,
N – количество шагов двигателя на оборот,
Ta – внешний приложенный момент,
Th – момент удержания.
Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить момент, превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение ротора является неконтролируемым.
На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится преодолевать трение. Силы трения могут быть расделены на две категории: статическое трение или трение покоя, для преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от скорости. Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового. На рис. 14а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 14б):
14а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 14б):
d = 2 ( S / (pi/2) ) arcsin(T f /T h) = ( S / (pi/4) ) arcsin(T f / Th),
где d – ширина мертвой зоны в радианах,
S – угол шага в радианах,
Tf – момент трения,
Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя.
Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 15).
Рис. 15. Момент удержания и рабочий момент шагового двигателя.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr = Th/(20.5). Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.
Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от двигателя больших моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 16а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 16б).
Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 16а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 16б).
Рис. 16. Форма тока в обмотках двигателя на разных скоростях работы.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем для их питания.
Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 17).
Рис. 17. Зависимость момента от скорости.
Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью разгона.
Область, которая лежит между кривыми, называется областью разгона.
Нужно отметить, что схема драйвера в значительной степени влияет на ход кривой момент-скорость, но этот вопрос будет рассмотрен ниже.
Разогнать!
Для того, чтобы работать на большой скорости из области разгона (рис. 17), необходимо стартовать на низкой скорости из области старта, а затем выполнить разгон. При остановке нужно действовать в обратном порядке: сначала выполнить торможение, и только войдя в область старта можно прекратить подачу управляющих импульсов. В противном случае произойдет потеря синхронности и положение ротора будет утеряно. Использование разгона и торможения позволяет достичь значительно больших скоростей — в индустриальных применениях используются скорости до 10000 полных шагов в секунду. Необходимо отметить, что непрерывная работа шагового двигателя на высокой скорости не всегда допустима ввиду нагрева ротора. Однако высокая скорость кратковременно может быть использована при осуществлении позиционирования.
При разгоне двигатель проходит ряд скоростей, при этом на одной из скоростей можно столкнуться с неприятным явлением резонанса. Для нормального разгона желательно иметь нагрузку, момент инерции которой как минимум равен моменту инерции ротора. На ненагруженном двигателе явление резонанса проявляется наиболее сильно. Подробно методы борьбы с этим явлением будут описаны ниже.
При осуществлении разгона или торможения важно правильно выбрать закон изменения скорости и максимальное ускорение. Ускорение должно быть тем меньше, чем выше инерционность нагрузки. Критерий правильного выбора режима разгона – это осуществление разгона до нужной скорости для конкретной нагрузки за минимальное время. На практике чаще всего применяют разгон и торможение с постоянным ускорением.
Реализация закона, по которому будет производится ускорение или торможение двигателя, обычно производится программно управляющим микроконтроллером, так как именно микроконтроллер обычно является источником тактовой частоты для драйвера шагового двигателя. Хотя раньше для этих целей применялись управляемые напряжением генераторы или пограммируемые делители частоты. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе практически любого микроконтроллера. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответствено значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Хотя раньше для этих целей применялись управляемые напряжением генераторы или пограммируемые делители частоты. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе практически любого микроконтроллера. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответствено значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Для наиболее общего случая требуется знать зависимость длительности шага от текущей скорости. Количество шагов, которое осуществляет двигатель при разгоне за время t равно:
N = 1/2At2+Vt, где N – число шагов, t – время, V – скорость, выраженная в шагах в единицу времени, A – ускорение, выраженное в шагах, деленных на время в квадрате.
Для одного шага N = 1, тогда длительность шага t1 = T = (-V+(V2+2A)0.5)/A
В результате осуществления шага скорость становится равной Vnew = (V2+2A)0.5
Вычисления по приведенным формулам довольно трудоемки и требуют значительных затрат процессорного времени. В то же время, они позволяют изменять значение ускорения в произвольный момент. Расчеты можно существенно упростить, если потребовать постоянства ускорения во время разгона и торможения. В этом случае можно записать зависимость длительности шага от времени разгона:
V = V0+At, где V – текущая скорость, V0 – начальная скорость (минимальная скорость, с которой начинается разгон), A – ускорение;
1/T = 1/T0+At, где T – длительность шага, T0 – начальная длительность шага, t – текущее время;
Откуда T = T0/(1+T0At)
Вычисления по этой формуле осуществить значительно проще, однако для того, чтобы поменять значение ускорения, требуется остановить двигатель.
Резонанс
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.
Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что систему ротор – магнитное поле – статор можно рассматривать как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля. Ввиду сложной конфигурации магнитного поля, резонансная частота ротора зависит от амплитуды колебаний. При уменьшении амплитуды частота растет, приближаясь к малоамплитудной частоте, которая более просто вычисляется количественно. Эта частота зависит от угла шага и от отношения момента удержания к моменту инерции ротора. Больший момент удержания и меньший момент инерции приводят к увеличению резонансной частоты.
Больший момент удержания и меньший момент инерции приводят к увеличению резонансной частоты.
Резонансная частота вычисляется по формуле:
F0 = (N*TH/(JR+JL))0.5/4*pi,
где F0 – резонансная частота,
N – число полных шагов на оборот,
TH – момент удержания для используемого способа управления и тока фаз,
JR – момент инерции ротора,
JL – момент инерции нагрузки.
Необходимо заметить, что резонансную частоту определяет момент инерции собственно ротора двигателя плюс момент инерции нагрузки, подключенной к валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая иногда приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту.
На практике эффект резонанса приводит к трудностям при работе на частоте, близкой к резонансной. Момент на частоте резонанса равен нулю и без принятия специальных мер шаговый двигатель не может при разгоне пройти резонансную частоту. В любом случае, явление резонанса способно существенно ухудшить точностные характеристики привода.
В системах с низким демпфированием существует опасность потери шагов или повышения шума, когда двигатель работает вблизи резонансной частоты. В некоторых случаях проблемы могут возникать и на гармониках частоты основного резонанса.
Когда используется не микрошаговый режим, основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0. 1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Для борьбы с резонансом можно использовать различные методы. Например, применение эластичных материалов при выполнении механических муфт связи с нагрузкой. Эластичный материал способствует поглощению энергии в резонансной системе, что приводит к затуханию паразитных колебаний. Другим способом является применение вязкого трения. Выпускаются специальные демпферы, где внутри полого цилиндра, заполненного вязкой кремнийорганической смазкой, может вращаться металлический диск. При вращении этой системы с ускорением диск испытывает вязкое трение, что эффективно демпфирует систему.
Существуют электрические методы борьбы с резонансом. Колеблющийся ротор приводит к возникновению в обмотках статора ЭДС. Если закоротить обмотки, которые на данном шаге не используются, это приведет к демпфированию резонанса.
И, наконец, существуют методы борьбы с резонансом на уровне алгоритма работы драйвера. Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы.
Например, можно использовать тот факт, что при работе с двумя включенными фазами резонансная частота примерно на 20% выше, чем с одной включенной фазой. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы.
Если это возможно, при старте и остановке нужно использовать частоты выше резонансной. Увеличение момента инерции системы ротор-нагрузка уменьшает резонансную частоту.
Однако, самой эффективной мерой для борьбы с резонансом является применение микрошагового режима.
Чем же его кормить?
Для питания обычного двигателя постоянного тока требуется лишь источник постоянного напряжения, а необходимые коммутации обмоток выполняются коллектором. С шаговым двигателем всё сложнее. Все комутации должен выполнять внешний контроллер. В настоящее время примерно в 95% случаев для управления шаговыми двигателями используются микроконтроллеры. В простейшем случае для управления шаговым двигателем в полношаговом режиме требуются всего два сигнала, сдвинутые по фазе на 90 градусов. Направление вращения зависит от того, какая фаза опережает. Скорость определяется часотой следования импульсов. В полушаговом режиме всё несколько сложнее и требуется уже минимум 4 сигнала. Все сигналы управления шаговым двигателем можно сформировать программно, однако это вызовет большую загрузку микроконтроллера. Поэтому чаще применяют специальные микросхемы драйверов шагового двигателя, которые уменьшают количество требуемых от процессора динамических сигналов. Типично эти микросхемы требуют тактовую частоту, которая является частотой повторения шагов и статический сигнал, который задает направление. Иногда еще присутствует сигнал включения полушагового режима. Для микросхем драйверов, которые работают в микрошаговом режиме, требуется большее количество сигналов. Распространенным является случай, когда необходимые последовательности сигналов управления фазами формируются с помощью одной микросхемы, а необходимые токи фаз обеспечивает другая микросхема. Хотя в последнее время появляется все больше драйверов, реализующих все функции в одной микросхеме.
Направление вращения зависит от того, какая фаза опережает. Скорость определяется часотой следования импульсов. В полушаговом режиме всё несколько сложнее и требуется уже минимум 4 сигнала. Все сигналы управления шаговым двигателем можно сформировать программно, однако это вызовет большую загрузку микроконтроллера. Поэтому чаще применяют специальные микросхемы драйверов шагового двигателя, которые уменьшают количество требуемых от процессора динамических сигналов. Типично эти микросхемы требуют тактовую частоту, которая является частотой повторения шагов и статический сигнал, который задает направление. Иногда еще присутствует сигнал включения полушагового режима. Для микросхем драйверов, которые работают в микрошаговом режиме, требуется большее количество сигналов. Распространенным является случай, когда необходимые последовательности сигналов управления фазами формируются с помощью одной микросхемы, а необходимые токи фаз обеспечивает другая микросхема. Хотя в последнее время появляется все больше драйверов, реализующих все функции в одной микросхеме.
Мощность, которая требуется от драйвера, зависит от размеров двигателя и составляет доли ватта для маленьких двигателей и до 10-20 ватт для больших двигателей. Максимальный уровень рассеиваемой мощности ограничен нагревом двигателя. Максимальная рабочая температура обычно указывается производителем, но можно приблизительно считать, что нормальной является температура корпуса 90 градусов. Поэтому при конструировании устройств с шаговыми двигателями, непрерывно работающими на максимальном токе, необходимо принимать меры, исключающие касание корпуса двигателя обслуживающим персоналом. В отдельных случаях возможно применение охлаждающего радиатора. Иногда это позволяет применить двигатель меньших размеров и добиться лучшего отношения мощность/стоимость.
Для данного размера шагового двигателя место, занимаемое обмотками, ограничено. Поэтому очень важно сконструировать драйвер так, чтобы для данных параметров обмоток обеспечить наилучшую эффективность.
Схема драйвера должна выполнять три главных задачи:
- иметь возможность включать и выключать ток в обмотках, а также менять его направление
- поддерживать заданное значение тока
- обеспечивать как можно более быстрое нарастание и спад тока для хороших скоростных характеристик
Способы изменения направления тока
При работе шагового двигателя требуется изменение направления магнитного поля независимо для каждой фазы. Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы (рис. 18).
Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы (рис. 18).
Рис. 18. Питание обмотки униполярного двигателя.
В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для такой переполюсовки требуется полный H-мост (рис. 19). Управление ключами в том и другом случае должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение.
Рис. 19. Питание обмотки биполярного двигателя.
Это простейший способ управления током обмоток, и как будет показано в дальнейшем, он существенно ограничивает возможности двигателя. Нужно отметить, что при раздельном управлении транзисторами H-моста возможны ситуации, когда источник питания закорочен ключами. Поэтому логическая схема управления должна быть построена таким образом, чтобы исключить эту ситуацию даже в случае сбоев управляющего микроконтроллера.
Поэтому логическая схема управления должна быть построена таким образом, чтобы исключить эту ситуацию даже в случае сбоев управляющего микроконтроллера.
Обмотки двигателя представляют собой индуктивность, а это значит, что ток не может бесконечно быстро нарастать или бесконечно быстро спадать без привлечения бесконечной разности потенциалов. При подключении обмотки к источнику питания ток будет с некоторой скоростью нарастать, а при отключении обмотки произойдет выброс напряжения. Этот выброс способен повредить ключи, в качестве которых используются биполярные или полевые транзисторы. Для ограничения этого выброса устанавливают специальные защитные цепочки. На схемах рис. 18 и 19 эти цепочки образованы диодами, значительно реже применяют конденсаторы или их комбинацию с диодами. Применение конденсаторов вызывает появление электрического резонанса, что может вызвать увеличение момента на некоторой скорости. На рис. 18 потребовалось 4 диода по той причине, что половинки обмоток униполярного двигателя расположены на общем сердечнике и сильно связаны между собой. Они работают как автотрансформатор и выбросы возникают на выводах обеих обмоток. Если в качестве ключей применены МОП-транзисторы, то достаточно только двух внешних диодов, так как у них внутри уже имеются диоды. В интегральных микросхемах, содержащих мощные выходные каскады с открытым коллектором, также часто имеются такие диоды. Кроме того, некоторые микросхемы, такие как ULN2003, ULN2803 и подобные имеют внутри оба защитных диода для каждого транзистора. Нужно отметить, что в случае применения быстродействующих ключей требуются сравнимые по быстродействию диоды. В случае применения медленных диодов требуется их шунтирование небольшими конденсаторами.
Они работают как автотрансформатор и выбросы возникают на выводах обеих обмоток. Если в качестве ключей применены МОП-транзисторы, то достаточно только двух внешних диодов, так как у них внутри уже имеются диоды. В интегральных микросхемах, содержащих мощные выходные каскады с открытым коллектором, также часто имеются такие диоды. Кроме того, некоторые микросхемы, такие как ULN2003, ULN2803 и подобные имеют внутри оба защитных диода для каждого транзистора. Нужно отметить, что в случае применения быстродействующих ключей требуются сравнимые по быстродействию диоды. В случае применения медленных диодов требуется их шунтирование небольшими конденсаторами.
Стабилизация тока
Для регулировки момента требуется регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рассеиваимую мощность на омическом сопротивлении обмоток. Более того, в полушаговом режиме ещё требуется в определенные моменты обеспечивать нулевое значение тока в обмотках, а в микрошаговом режиме вообще требуется задание разных значений тока.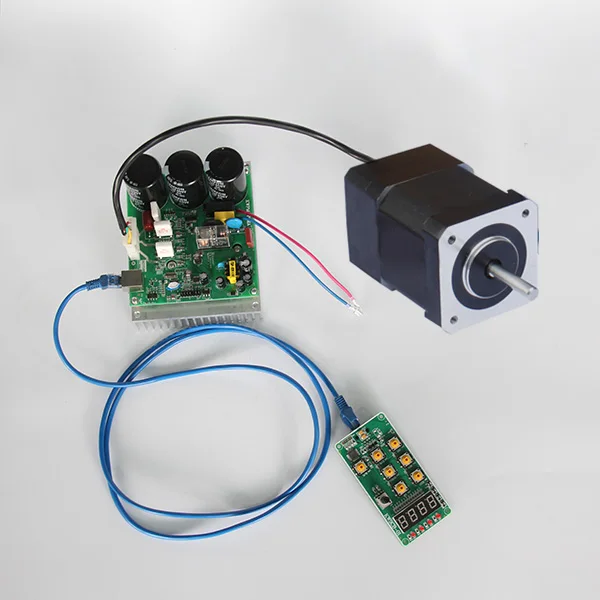
Для каждого двигателя производителем указывается номинальное рабочее напряжение обмоток. Поэтому простейший способ питания обмоток – это использование источника постоянного напряжения. В этом случае ток ограничен омическим сопротивлением обмоток и напряжением источника питания (рис. 20а), поэтому такой способ питания называют L/R-питанием. Ток в обмотке нарастает по экспоненциальному закону со скоростью, определяемой индуктивностью, активным сопротивлением обмотки и приложенным напряжением. При повышении частоты ток не достигает номинального значения и момент падает. Поэтому такой способ питания пригоден только при работе на малых скоростях и используется на практике только для маломощных двигателей.
Рис. 20. Питание обмотки номинальным напряжением (а) и использование ограничительного резистора (б).
При работе на больших скоростях требуется увеличивать скорость нарастания тока в обмотках, что возможно путем повышения напряжения источника питания. При этом максимальный ток обмотки должен быть ограничен с помощью дополнительного резистора. Например, если используется напряжение питание в 5 раз большее номинального, то требуется такой дополнительный резистор, чтобы общее сопротивление составило 5R, где R – омическое сопротивление обмотки (L/5R-питание). Этот способ питания обеспечивает более быстрое нарастание тока и как следствие, больший момент (рис. 20б). Однако он имеет существенный недостаток: на резисторе рассеивается дополнительная мощность. Большие габариты мощных резисторов, необходимость отвода тепла и повышенная необходимая мощность источника питания – всё это делает такой метод неэффективным и ограничивает область его применение небольшими двигателями мощностью 1 – 2 ватта. Нужно сказать, что до начала 80-х годов прошлого века параметры шаговых двигателей, приводимые производителями, относились именно к такому способу питания.
Например, если используется напряжение питание в 5 раз большее номинального, то требуется такой дополнительный резистор, чтобы общее сопротивление составило 5R, где R – омическое сопротивление обмотки (L/5R-питание). Этот способ питания обеспечивает более быстрое нарастание тока и как следствие, больший момент (рис. 20б). Однако он имеет существенный недостаток: на резисторе рассеивается дополнительная мощность. Большие габариты мощных резисторов, необходимость отвода тепла и повышенная необходимая мощность источника питания – всё это делает такой метод неэффективным и ограничивает область его применение небольшими двигателями мощностью 1 – 2 ватта. Нужно сказать, что до начала 80-х годов прошлого века параметры шаговых двигателей, приводимые производителями, относились именно к такому способу питания.
Еще более быстрое нарастание тока можно получить, если использовать для питания двигателя генератор тока. Нарастание тока будет происходить линейно, это позволит быстрее достигать номинального значения тока. Тем более, что пара мощных резисторов может стоить дороже, чем пара мощных транзисторов вместе с радиаторами. Но как и в предыдущем случае, генератор тока будет рассеивать дополнительную мощность, что делает эту схему питания неэффективной.
Тем более, что пара мощных резисторов может стоить дороже, чем пара мощных транзисторов вместе с радиаторами. Но как и в предыдущем случае, генератор тока будет рассеивать дополнительную мощность, что делает эту схему питания неэффективной.
Существует еще одно решение, обеспечивающее высокую скорость нарастания токи и низкую мощность потерь. Основано оно на применении двух источников питания.
Рис. 21. Питание обмотки двигателя ступенчатым напряжением.
В начале каждого шага кратковременно обмотки подключаются к более высоковольтному источнику, который обеспечивает быстрое нарастание тока (рис. 21). Затем напряжение питания обмоток уменьшается (момент времени t1 на рис. 21). Недостатком этого метода является необходимость двух ключей, двух источников питания и более сложной схемы управления. В системах, где такие источники уже есть, метод может оказаться достаточно дешёвым. Еще одной трудностью является невозможность определения момента времени t1 для общего случая. Для двигателя с меньшей индуктивностью обмоток скорость нарастания тока выше и при фиксированном t1 средний ток может оказаться выше номинального, что чревато перегревом двигателя.
Для двигателя с меньшей индуктивностью обмоток скорость нарастания тока выше и при фиксированном t1 средний ток может оказаться выше номинального, что чревато перегревом двигателя.
Еще одним методом стабилизации тока в обмотках двигателя является ключевое (широтно-импульсное) регулирование. Современные драйверы шаговых двигателей используют именно этот метод. Ключевой стабилизатор обеспечивает высокую скорость нарастания тока в обмотках вместе с простотой его регулирования и очень низкими потерями. Еще одним преимуществом схемы с ключевой стабилизацией тока является и то, что она поддерживает момент двигателя постоянным, независимо от колебаний напряжения питания. Это позволяет использовать простые и дешевые нестабилизированные источники питания.
Для обеспечения высокой скорости нарастания тока используют напряжение источника питания, в несколько раз превышающее номинальное. Путем регулировки скважности импульсов, среднее напряжение и ток поддерживаются на номинальном для обмотки уровне. Поддержание производится в результате действия обратной связи. Последовательно с обмоткой включается резистор – датчик тока R (рис. 22а). Падение напряжения на этом резисторе пропорционально току в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
Поддержание производится в результате действия обратной связи. Последовательно с обмоткой включается резистор – датчик тока R (рис. 22а). Падение напряжения на этом резисторе пропорционально току в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
Рис. 22. Различные схемы ключевой стабилизации тока.
Управляя величиной Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Можно также задавать его с помощью ЦАП в форме синусоиды, реализуя таким образом микрошаговый режим. Такой способ управления ключевым транзистором обеспечивает постоянную величину пульсаций тока в обмотке, которая определяется гистерезисом компаратора. Однако частота переключений будет зависеть от скорости изменения тока в обмотке, в частности, от ее индуктивности и от напряжения питания. Кроме того, две такие схемы, питающие разные фазы двигателя, не могут быть засинхронизированы что может явится причиной дополнительных помех.
Кроме того, две такие схемы, питающие разные фазы двигателя, не могут быть засинхронизированы что может явится причиной дополнительных помех.
От указанных недостатков свободна схема с постоянной частотой переключения (рис. 22б). Ключевым транзистором управляет триггер, который устанавливается специальным генератором. Когда триггер устанавливается, ключевой транзистор открывается и ток фазы начинает расти. Вместе с ним растет и падение напряжения на датчике тока. Когда оно достигает опорного напряжения, компаратор переключается, сбрасывая триггер. Ключевой транзистор при этом выключается и ток фазы начинает спадать до тех пор, пока триггер не будет вновь установлен генератором. Такая схема обеспечивает постоянную частоту коммутации, однако величина пульсаций тока не будет постоянной. Частота генератора обычно выбирается не менее 20кГц, чтобы двигатель не создавал слышимого звука. В то же время слишком высокая частота переключений может вызвать повышенные потери в сердечнике двигателя и потери на переключениях транзисторов. Хотя потери в сердечнике с повышением частоты растут не так быстро ввиду уменьшения амплитуды пульсаций тока с ростом частоты. Пульсации порядка 10% от среднего значения тока обычно не вызывают проблем с потерями.
Хотя потери в сердечнике с повышением частоты растут не так быстро ввиду уменьшения амплитуды пульсаций тока с ростом частоты. Пульсации порядка 10% от среднего значения тока обычно не вызывают проблем с потерями.
Подобная схема реализована внутри микросхемы L297 фирмы SGS-Thomson, применение которой сводит к минимуму количество внешних компонентов. Ключевое регулирование реализуют и другие специализированные микросхемы.
Рис. 23. Форма тока в обмотках двигателя для различных способов питания.
На рис. 23 показана форма тока в обмотках двигателя для трех способов питания. Наилучшим в смысле момента является ключевой метод. К тому же он обеспечивает высокий КПД и позволяет просто регулировать величину тока.
Быстрый и медленный спад тока
На рис. 19 были показаны конфигурации ключей в H-мосту для включения разных направлений тока в обмотке. Для выключения тока можно выключить все ключи H-моста или же оставить один ключ включенным (рис. 24). Эти две ситуации различаются по скорости спада тока в обмотке. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС самоиндукции, имеющая противоположное источнику питания направление. При использовании транзисторов в качестве ключей необходимо использовать шунтирующие диоды, чтобы обеспечить проводимость в обе стороны. Скорость изменения тока в индуктивности пропорциональна приложенному напряжению. Это справедливо как для нарастания тока, так и для его спада. Только в первом случае источником энергии является источник питания, а во втором сама индуктивность отдает запасенную энергию. Этот процесс может происходить при разных условиях.
Эти две ситуации различаются по скорости спада тока в обмотке. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС самоиндукции, имеющая противоположное источнику питания направление. При использовании транзисторов в качестве ключей необходимо использовать шунтирующие диоды, чтобы обеспечить проводимость в обе стороны. Скорость изменения тока в индуктивности пропорциональна приложенному напряжению. Это справедливо как для нарастания тока, так и для его спада. Только в первом случае источником энергии является источник питания, а во втором сама индуктивность отдает запасенную энергию. Этот процесс может происходить при разных условиях.
Рис. 24. Медленный и быстрый спад тока.
На рис. 24а показано состояние ключей H-моста, когда обмотка включена. Включены ключи A и D, направление тока показано стрелкой. На рис. 24б обмотка выключена, но ключ A включен. ЭДС самоиндукции закорачивается через этот ключ и диод VD3. В это время на выводах обмотки будет небольшое напряжение, равное прямому падению на диоде плюс падение на ключе (напряжение насыщения транзистора). Так как напряжение на выводах обмотки мало, малой будет и скорость изменения тока. Соответственно малой будет и скорость спадания магнитного поля. А это значит, еще некоторое время статор двигателя будет создавать магнитное поле, которого в это время быть не должно. На вращающийся ротор это поле будет оказывать тормозящее воздействие. При высоких скоростях работы двигателя этот эффект может серъезно помешать нормальной работе двигателя. Быстрое спадание тока при выключении является очень важным для высокоскоростных контроллеров, работающих в полушаговом режиме.
Так как напряжение на выводах обмотки мало, малой будет и скорость изменения тока. Соответственно малой будет и скорость спадания магнитного поля. А это значит, еще некоторое время статор двигателя будет создавать магнитное поле, которого в это время быть не должно. На вращающийся ротор это поле будет оказывать тормозящее воздействие. При высоких скоростях работы двигателя этот эффект может серъезно помешать нормальной работе двигателя. Быстрое спадание тока при выключении является очень важным для высокоскоростных контроллеров, работающих в полушаговом режиме.
Возможен и другой способ отключения тока обмотки, когда размыкаются все ключи H-моста (рис 24в). При этом ЭДС самоиндукции закорачивается чрез диоды VD2, VD3 на источник питания. Это значит, что во время спада тока на обмотке будет напряжение, равное сумме напряжения источника питания и прямого падения на двух диодах. По сравнению с первым случаем, это значительно большее напряжение. Соответственно, более быстрым будет спад тока и магнитного поля. Такое решение, использующее напряжение источника питания для ускорения спада тока является наиболее простым, но не единственным. Нужно сказать, что в ряде случаев на источнике питания могут появится выбросы, для подавления которых понадобятся специальные демферные цепочки. Безразлично, каким способом обеспечивается на обмотке повышенное напряжение во время спада тока. Для этого можно применить стабилитроны или варисторы. Однако на этих элементах будет рассеиваться дополнительная мощность, которая в первом случае отдавалась обратно в источник питания.
Такое решение, использующее напряжение источника питания для ускорения спада тока является наиболее простым, но не единственным. Нужно сказать, что в ряде случаев на источнике питания могут появится выбросы, для подавления которых понадобятся специальные демферные цепочки. Безразлично, каким способом обеспечивается на обмотке повышенное напряжение во время спада тока. Для этого можно применить стабилитроны или варисторы. Однако на этих элементах будет рассеиваться дополнительная мощность, которая в первом случае отдавалась обратно в источник питания.
Для униполярного двигателя ситуация более сложная. Дело в том, что половинки обмотки, или две отдельных обмотки одной фазы сильно связаны между собой. В результате этой связи на закрывающемся транзисторе будут иметь место выбросы повышенной амплитуды. Поэтому транзисторы должны быть защищены специальными цепочками. Эти цепочки для обеспечения быстрого спада тока должны обеспечивать довольно высокое напряжение ограничения. Чаще всего применяются диоды вместе со стабилитронами или варисторы. Один из способов схемотехнической реализации показан на рис. 25.
Один из способов схемотехнической реализации показан на рис. 25.
Рис. 25. Пример реализации быстрого спада тока для униполярного двигателя.
При ключевом регулировании величина пульсаций тока зависит от скорости его спада. Здесь возможны разные вырианты.
Если обеспечить закорачивание обмотки диодом, будет реализован медленный спад тока. Это приводит к уменьшению амплитуды пульсаций тока, что является весьма желательным, особенно при работе двигателя в микрошаговом режиме. Для данного уровня пульсаций медленный спад тока позволяет работать на более низких частотах ШИМ, что уменьшает нагрев двигателя. По этим причинам медленный спад тока широко используется. Однако существует несколько причин, по которым медленное нарастание тока не всегда является оптимальным: во-первых, из-за отрицательной обратной ЭДС, ввиду малого напряжения на обмотке во время спада тока, реальный средний ток обмотки может оказаться завышенным; во-вторых, когда требуется резко уменьшить ток фазы (например, в полушаговом режиме), медленный спад не позволит сделать это быстро; в-третьих, когда требуется установить очень низкое значение тока фазы, регулирование может нарушится ввиду существования ограничения на минимальное время включенного состояния ключей.
Высокая скорость спада тока, которая реализуется путем замыкания обмотки на источник питания, приводит к повышенным пульсациям. Вместе с тем, устраняются недостатки, свойственные медленному спаду тока. Однако при этом точность поддержания среднего тока меньше, также больше потери.
Наиболее совершенные микросхемы драйверов имеют возможность регулировать скорость спада тока.
Практическая реализация драйверов
Драйвер шагового двигателя должен решать две основные задачи: это формирование необходимых временных последовательностей сигналов и обеспечение необходимого тока в обмотках. В интегральных реализациях иногда эти задачи выполняются разными микросхемами. Примером может служить комплект микросхем L297 и L298 фирмы SGS-Thomson. Микросхема L297 содержит логику формирования временных последовательностей, а L298 представляет собой мощный сдвоенный H-мост. К сожалению, существует некоторая путаница в терминологии относительно подобных микросхем. Понятие «драйвер» часто применяют ко многим микросхемам, даже если их функции сильно различаются. Иногода микросхемы логики называют «трансляторами». В этой статье далее будет использоваться следующая терминология: «контроллер» — микросхема, ответственная за формирование временных последовательностей; «драйвер» — мощная схема питания обмоток двигателя. Однако термины «драйвер» и «контроллер» могут также обозначать законченное устройство управления шаговым двигателем. Необходимо отметить, что в последнее время все чаще контроллер и драйвер объединяются в одной микросхеме.
Иногода микросхемы логики называют «трансляторами». В этой статье далее будет использоваться следующая терминология: «контроллер» — микросхема, ответственная за формирование временных последовательностей; «драйвер» — мощная схема питания обмоток двигателя. Однако термины «драйвер» и «контроллер» могут также обозначать законченное устройство управления шаговым двигателем. Необходимо отметить, что в последнее время все чаще контроллер и драйвер объединяются в одной микросхеме.
На практике можно обойтись и без специализированных микросхем. Например, все функции контроллера можно реализовать программно, а в качестве драйвера применить набор дискретных транзисторов. Однако при этом микроконтроллер будет сильно загружен, а схема драйвера может получится громоздкой. Несмотря на это, в некоторых случаях такое решение будет экономически выгодным.
Самый простой драйвер требуется для управления обмотками униполярного двигателя. Для этого подходят простейшие ключи, в качестве которых могут быть использованы биполярные или полевые транзисторы. Достаточно эффективны мощные МОП-транзисторы, управляемые логическим уровнем, такие как IRLZ34, IRLZ44, IRL540. У них сопротивление в открытом состоянии менее 0.1ом и допустимый ток порядка 30А. Эти транзисторы имеют отечественные аналоги КП723Г, КП727В и КП746Г соответственно. Существуют также специальные микросхемы, которые содержат внутри несколько мощных транзисторных ключей. Примером может служить микросхема ULN2003 фирмы Allegro (наш аналог К1109КТ23), которая содержит 7 ключей с максимальным током 0.5 А. Принципиальная схема одной ячейки этой микросхемы приведена на рис. 26.
Достаточно эффективны мощные МОП-транзисторы, управляемые логическим уровнем, такие как IRLZ34, IRLZ44, IRL540. У них сопротивление в открытом состоянии менее 0.1ом и допустимый ток порядка 30А. Эти транзисторы имеют отечественные аналоги КП723Г, КП727В и КП746Г соответственно. Существуют также специальные микросхемы, которые содержат внутри несколько мощных транзисторных ключей. Примером может служить микросхема ULN2003 фирмы Allegro (наш аналог К1109КТ23), которая содержит 7 ключей с максимальным током 0.5 А. Принципиальная схема одной ячейки этой микросхемы приведена на рис. 26.
Рис. 26. Принципиальная схема одной ячейки микросхемы ULN2003.
Аналогичные микросхемы выпускаются многими фирмами. Необходимо отметить, что эти микросхемы пригодны не только для питания обмоток шаговых двигателей, но и для питания любых других нагрузок. Кроме простых микросхем драйверов существуют и более сложные микросхемы, имеющие встроенный контроллер, PWM-регулировку тока и даже ЦАП для микрошагового режима.
Как уже отмечалось ранее, для управления биполярными двигателями требуются более сложные схемы, такие как H-мосты. Такие схемы тоже можно реализовать на дискретных элементах, хотя в последнее время все чаще они реализуются на интегральных схемах. Пример дискретной реализации показан на рис. 27.
Рис. 27. Реализация мостового драйвера на дискретных компонентах.
Такой H-мост управляется с помощью двух сигналов, поэтому он не позволяет обеспечить всех возможных комбинаций. Обмотка запитана, когда уровни на входах разные и закорочена, когда уровни одинаковые. Это позволяет получить только медленный спад тока (динамическое торможение). Мостовые драйверы в интегральном исполнении выпускаются многими фирмами. Примером могут служить L293 (КР1128КТ3А) и L298 фирмы SGS-Thomson.
До недавнего времени большое количество микросхем для управления шаговыми двигателя выпускала фирма Ericsson. Однако 11 июня 1999 года она передала производство своих микросхем индустриального назначения фирме New Japan Radio Company (New JRC). При этом обозначения микросхем помянялись с PBLxxxx на NJMxxxx.
При этом обозначения микросхем помянялись с PBLxxxx на NJMxxxx.
Как простые ключи, так и H-мосты могут составлять часть ключевого стабилизатора тока. Схема управления ключами может быть выполнена на дискретных компонентах или в виде специализированной микросхемы. Довольно популярной микросхемой, реализующей ШИМ-стабилизацию тока, является L297 фирмы SGS-Thomson. Совместно с микросхемой мостового драйвера L293 или L298 они образуют законченную систему управления для шагового двигателя (рис. 28).
width=710><br><b><font color=red>Рисунок не помещается на странице и поэтому сжат!</font><br>Для того, чтобы просмотреть его полностью, щелкните <a href=/files/img/articles/rebooting/28.gif target=_blank>здесь</a>.</b><br>
Рис. 28. Типовая схема включения микросхем L297 и L298N.
Микросхема L297 сильно разгружает управляющий микроконтроллер, так как от него требуется только тактовая частота CLOCK (частота повторения шагов) и несколько статических сигналов: DIRECTION – направление (сигнал внутренне синхронизирован, переключать можно в любой момент), HALF/FULL – полушаговый/полношаговый режим, RESET – устанавливает фазы в исходное состояние (ABCD = 0101), ENABLE – разрешение работы микросхемы, V ref – опорное напряжение, которое задает пиковую величину тока при ШИМ-регулировании. Кроме того, имеется несколько дополнительных сигналов. Сигнал CONTROL задает режим работы ШИМ-регулятора. При его низком уровне ШИМ-регулирование происходит по выходам INh2, INh3, а при высоком – по выходам ABCD. SYNC – выход внутреннего тактового генератора ШИМ. Он служит для синхронизации работы нескольких микросхем. Также может быть использован как вход при тактировании от внешнего генератора. HOME – сигнал начального положения (ABCD = 0101). Он используется для синхронизации переключения режимов HALF/FULL. В зависимости от момента перехода в полношаговый режим микросхема может работать в режиме с одной включенной фазой или с двумя включенными фазами.
Кроме того, имеется несколько дополнительных сигналов. Сигнал CONTROL задает режим работы ШИМ-регулятора. При его низком уровне ШИМ-регулирование происходит по выходам INh2, INh3, а при высоком – по выходам ABCD. SYNC – выход внутреннего тактового генератора ШИМ. Он служит для синхронизации работы нескольких микросхем. Также может быть использован как вход при тактировании от внешнего генератора. HOME – сигнал начального положения (ABCD = 0101). Он используется для синхронизации переключения режимов HALF/FULL. В зависимости от момента перехода в полношаговый режим микросхема может работать в режиме с одной включенной фазой или с двумя включенными фазами.
Ключевое регулирование реализуют и многие другие микросхемы. Некоторые микросхемы обладают теми или иными особенностями, например драйвер LMD18T245 фирмы National Semiconductor не требует применения внешнего датчика тока, так как он реализован внутри на основе одной ячейки ключевого МОП-транзистора.
Некоторые микросхемы предназначены специально для работы в микрошаговом режиме. Примером может служить микросхема A3955 фирмы Allegro. Она имеет встроенный 3-битный нелинейный ЦАП для задания изменяющегося по синусоидальному закону тока фазы.
Примером может служить микросхема A3955 фирмы Allegro. Она имеет встроенный 3-битный нелинейный ЦАП для задания изменяющегося по синусоидальному закону тока фазы.
Рис. 29. Ток и вектор смещения ротора.
Смещение ротора в зависимомти от токов фаз, которые сформированы этим 3-битным ЦАПом, показано на рис. 29. Микросхема A3972 имеет встроенный 6-битный линейный ЦАП.
Выбор типа драйвера
Максимальный момент и мощность, которую может обеспечить на валу шаговый двигатель, зависит от размеров двигателя, условий охлаждения, режима работы (отношения работа/пауза), от параметров обмоток двигателя и от типа применяемого драйвера. Тип применяемого драйвера сильно влияет на мощность на валу двигателя. При одной и той же рассеиваемой мощности драйвер с импульсной стабилизацией тока обеспечивает выигрыш в моменте на некоторых скоростях до 5 – 6 раз, по сравнению с питанием обмоток номинальным напряжением. При этом также расширяется диапазон допустимых скоростей.
Технология приводов на основе шаговых двигателей постоянно развивается. Развитие направлено на получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностей, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
На практике немаловажным является и время разработки привода на основе шагового двигателя. Разработка специализированной конструкции для каждого конкретного случая требует значительных затрат времени. С этой точки зрения предпочтительней применять универсальные схемы управления на основе PWM стабилизации тока, несмотря на их более высокую стоимость.
Практический пример контроллера шагового двигателя на основе микроконтроллера семейства AVR
Несмотря на то, что в настоящее время существует большое количество специализированных микросхем для управления шаговыми двигателями, в отдельных случаях можно обойтись и без них. Когда не предъявляется слишком жестких требований, контроллер можно реализовать полностью программно. При этом стоимость такого контроллера получается очень низкой.
При этом стоимость такого контроллера получается очень низкой.
Предлагаемый контроллер предназначен для управления униполярным шаговым двигателем со средним током каждой обмотки до 2.5А. Контроллер может использоваться с распространенными шаговыми двигателями типа ДШИ-200-1, -2, -3. Его также можно использовать и для управления менее мощными двигателями, например теми, что применялись для позиционирования головок в 5-дюймовых дисководах. При этом схему можно упростить, отказавшись от параллельного включения ключевых транзисторов и от ключевой стабилизации тока, так как для маломощных двигателей достаточно простого L/R-питания.
width=710><br><b><font color=red>Рисунок не помещается на странице и поэтому сжат!</font><br>Для того, чтобы просмотреть его полностью, щелкните <a href=»/files/img/articles/rebooting/30.gif» target=_blank>здесь</a>.</b><br>
Рис. 30. Принципиальная схема контроллера шагового двигателя.
30. Принципиальная схема контроллера шагового двигателя.
Основой устройства (рис. 30) является микроконтроллер U1 типа AT90S2313 фирмы Atmel. Сигналы управления обмотками двигателя формируются на портах PB4 – PB7 программно. Для коммутации обмоток используются по два включенных параллельно полевых транзистора типа КП505А, всего 8 транзисторов (VT1 – VT8). Эти транзисторы имеют корпус TO-92 и могут коммутировать ток до 1.4А, сопротивление канала составляет около 0.3 ома. Для того, чтобы транзисторы оставались закрытыми во время действия сигнала «сброс» микроконтроллера (порты в это время находятся в высокоимпедансном состоянии), между затворами и истоками включены резисторы R11 – R14. Для ограничения тока перезарядки емкости затворов установлены резисторы R6 – R9. Данный контроллер не претендует на высокие скоростные характеристики, поэтому вполне устраивает медленный спад тока фаз, который обеспечивается шунтированием обмоток двигателя диодами VD2 – VD5. Для подключения шагового двигателя имеется 8-контактный разъем XP3, который позволяет подключить двигатель, имеющий два отдельных вывода от каждой обмотки (как, например, ДШИ-200). Для двигателей с внутренним соединением обмоток один или два общих контакта разъема останутся свободными.
Для двигателей с внутренним соединением обмоток один или два общих контакта разъема останутся свободными.
Необходимо отметить, что контроллер может быть использован для управления двигателем с большим средним током фаз. Для этого только необходимо заменить транзисторы VT1 – VT8 и диоды VD2 – VD5 более мощными. Причем в этом случае параллельное включение транзисторов можно не использовать. Наиболее подходящими являются МОП-транзисторы, управляемые логическим уровнем. Например, это КП723Г, КП727В и другие.
Стабилизация тока осуществляется с помощью ШИМ, которая тоже реализована программно. Для этого используются два датчика тока R15 и R16. Сигналы, снятые с датчиков тока, через ФНЧ R17C8 и R18C9 поступают на входы компараторов U3A и U3B. ФНЧ предотвращают ложные срабатывания компараторов вследствие действия помех. На второй вход каждого компаратора должно быть подано опорное напряжение, которое и определяет пиковый ток в обмотках двигателя. Это напряжение формируется микроконтроллером с помощью встроенного таймера, работающего в режиме 8-битной ШИМ. Для фильтрации сигнала ШИМ используется двухзвенный ФНЧ R19C10R22C11. Одновременно резисторы R19, R22 и R23 образуют делитель, который задает масштаб регулировки токов фаз. В данном случае максимальный пиковый ток, соответствующий коду 255, выбран 5.11А, что соответствует напряжению 0.511В на датчиках тока. Учитывая тот факт, что постоянная составляющая на выходе ШИМ меняется от 0 до 5В, необходимый коэффициент деления равен примерно 9.7. Выходы компараторов подключены к входам прерываний микроконтроллера INT0 и INT1.
Для фильтрации сигнала ШИМ используется двухзвенный ФНЧ R19C10R22C11. Одновременно резисторы R19, R22 и R23 образуют делитель, который задает масштаб регулировки токов фаз. В данном случае максимальный пиковый ток, соответствующий коду 255, выбран 5.11А, что соответствует напряжению 0.511В на датчиках тока. Учитывая тот факт, что постоянная составляющая на выходе ШИМ меняется от 0 до 5В, необходимый коэффициент деления равен примерно 9.7. Выходы компараторов подключены к входам прерываний микроконтроллера INT0 и INT1.
Для управления работой двигателя имеются два логических входа: FWD (вперед) и REW (назад), подключенных к разъему XP1. При подаче НИЗКОГО логического уровня на один из этих входов, двигатель начинает вращаться на заданной минимальной скорости, постепенно разгоняется с заданным постоянным ускорением. Разгон завершается, когда двигатель достигает заданной рабочей скорости. Если подается команда изменения направления вращения, двигатель с тем же ускорением тормозится, затем реверсируется и снова разгоняется.
Кроме командных входов, имеются два входа для концевых выключателей, подключенных к разъему XP2. Концевой выключатель считается сработавшим, если на соответствующем входе присутствует НИЗКИЙ логический уровень. При этом вращение в данном направлении запрещено. При срабатывании концевого выключателя во время вращения двигателя он переходит к торможению с заданным ускорением, а затем останавливается.
Командные входы и входы концевых выключателей защищены от перенапряжений цепочками R1VD6, R2VD7, R3VD8 и R4VD9, состоящими из резистора и стабилитрона.
Питание микроконтроллера формируется с помощью микросхемы стабилизатора 78LR05, которая одновременно выполняет функции монитора питания. При понижении напряжения питания ниже установленного порога эта микросхема формирует для микроконтроллера сигнал «сброс». Питание на стабилизатор подается через диод VD1, который вместе с конденсатором C6 уменьшает пульсации, вызванные коммутациями относительно мощной нагрузки, которой является шаговый двигатель. Питание на плату подается через 4-контактный разъем XP4, контакты которого задублированы.
Питание на плату подается через 4-контактный разъем XP4, контакты которого задублированы.
Демонстрационная версия программы позволяет осуществлять разгон и торможение двигателя с постоянным ускорением, а также вращение на постоянной скорости в полношаговом или полушаговом режиме. Эта программа содержит весь необходимый набор функций и может быть использована как базовая для написания специализированных программ. Поэтому имеет смысл рассмотреть ее структуру более подробно.
Главной задачей программы является формирование импульсных последовательностей для 4-х обмоток двигателя. Поскольку для этих последовательностей временные соотношения являются критичными, формирование выполняется в обработчике прерывания таймера 0. Можно сказать, основную работу программа делает именно в этом обработчике. Блок-схема обработчика приведена на рис. 31.
Рис. 31. Блок-схема обработчика прерывания таймера 0.
Несомненно, было бы удобнее использовать таймер 1, так как он 16-разрядный и способен вызывать периодические прерывания по совпадению с автоматическим обнулением. Однако он занят формированием с помощью ШИМ опорного напряжения для компараторов. Поэтому приходится перезагружать таймер 0 в прерывании, что требует некоторой корректировки загружаемой величины и вызывает некоторый джиттер, который, однако, на практике не мешает. В качестве основной временной базы выбран интервал 25мкс, который и формируется таймером. С такой дискретностью могут формироваться временные последовательности фаз, такой же период имеет и ШИМ стабилизации тока в фазах двигателя.
Однако он занят формированием с помощью ШИМ опорного напряжения для компараторов. Поэтому приходится перезагружать таймер 0 в прерывании, что требует некоторой корректировки загружаемой величины и вызывает некоторый джиттер, который, однако, на практике не мешает. В качестве основной временной базы выбран интервал 25мкс, который и формируется таймером. С такой дискретностью могут формироваться временные последовательности фаз, такой же период имеет и ШИМ стабилизации тока в фазах двигателя.
Для формирования периода повторения шагов используется программный 16-разрядный таймер STCNT. В отличие от таймера 0, его загрузочная величина не является константой, так как именно она определяет скорость вращения двигателя. Таким образом, переключение фаз происходит только при переполнении программного таймера.
Последовательность чередования фаз задана таблично. В памяти программ микроконтроллера имеются три разных таблицы: для полношагового режима без перекрытия фаз, полношагового с перекрытием и для полушагового режима. Все таблицы имеют одинаковую длину 8 байт. Нужная таблица в начале работы загружается в ОЗУ, что позволяет наиболее просто переходить между разными режимами работы двигателя. Выборка значений из таблицы происходит с помощью указателя PHASE, поэтому переключение направления вращения двигателя тоже осуществляется очень просто: для вращения вперед требуется инкрементировать указатель, а для вращения назад – декрементировать.
Все таблицы имеют одинаковую длину 8 байт. Нужная таблица в начале работы загружается в ОЗУ, что позволяет наиболее просто переходить между разными режимами работы двигателя. Выборка значений из таблицы происходит с помощью указателя PHASE, поэтому переключение направления вращения двигателя тоже осуществляется очень просто: для вращения вперед требуется инкрементировать указатель, а для вращения назад – декрементировать.
Самая «главная» переменная в программе – это 24-битная знаковая переменная VC, которая содержит значение текущей скорости. Знак этой переменной определяет направление вращения, а значение – частоту следования шагов. Нулевое значение этой переменной говорит о том, что двигатель остановлен. Программа в этом случае выключает ток всех фаз, хотя во многих приложениях в этой ситуации требуется оставить включенными текущие фазы и лишь несколько уменьшить их ток, обеспечив этим удержание положения двигателя. При необходимости такое изменение логики работы программы сделать очень просто.
Таким образом, в случае переполнения программного таймера STCNT происходит анализ значения переменной VC, в случае положительного значения указатель PHASE инкрементируется, а в случае отрицательного – декрементируется. Затем из таблицы выбирается очередная комбинация фаз, которая выводится в порт. В случае нулевого значения VC указатель PHASE не изменяется, и в порт выводятся все нулевые значения.
Величина T, которой следует загружать таймер STCNT, однозначно связана со значением переменной VC. Однако перевод частоты в период занимает довольно много времени, поэтому эти вычисления производятся в основной программе, и не на каждом шаге, а гораздо реже. Вообще, эти вычисления нужно периодически производить только во время разгона или торможения. В остальных случаях скорость, и, соответственно, период повторения шагов, не меняются.
Для осуществления ШИМ-стабилизации тока фазы должны периодически включаться, а затем, при достижении током заданного уровня, выключаться. Периодическое включение производится в прерывании таймера 0, для чего даже в случае отсутствия переполнения программного таймера STCNT в порт выводится текущая комбинация фаз. Происходит это с периодом 25мкс (что соответствует частоте ШИМ 40кГц). Выключением фаз управляют компараторы, выходы которых подключены к входам прерывания INT0 и INT1. Прерывания разрешаются после того, как ток фаз включается, и запрещаются сразу после переключения компараторов. Это исключает их повторную обработку. В обработчиках прерываний происходит только отключение соответствующих фаз (рис. 32).
Происходит это с периодом 25мкс (что соответствует частоте ШИМ 40кГц). Выключением фаз управляют компараторы, выходы которых подключены к входам прерывания INT0 и INT1. Прерывания разрешаются после того, как ток фаз включается, и запрещаются сразу после переключения компараторов. Это исключает их повторную обработку. В обработчиках прерываний происходит только отключение соответствующих фаз (рис. 32).
Рис. 32. Блок-схема обработчика прерываний INT0 и INT1.
Процессы, происходящие при ШИМ-стабилизации тока, показаны на рис. 33. Особо следует отметить, что ток в датчике тока имеет прерывистый характер даже в том случае, если ток обмотки не прерывается. Это связано тем, что во время спада тока его путь не проходит через датчик тока (а проходит через диод).
Рис. 33. Процесс ШИМ-стабилизации тока.
Нужно сказать, что аналоговая часть системы ШИМ-стабилизации тока фаз двигателя является довольно «капризной». Дело в том, что сигнал, снимаемый с датчика тока, содержит большое количество помех. Помехи возникают в основном в моменты коммутации обмоток двигателя, причем как «своей», так и «чужой» фазы. Для правильной работы схемы требуется корректная разводка печатной платы, особенно это касается земляных проводников. Возможно, придется подобрать номиналы ФНЧ на входе компаратора или даже ввести в компаратор небольшой гистерезис. Как уже отмечалось выше, при управлении маломощными двигателями от ШИМ-стабилизации тока можно вовсе отказаться, применив обычную L/R-схему питания обмоток. Для исключения ШИМ-стабилизации достаточно просто не подключать входы INT0 и INT1 микроконтроллера, естественно, при этом можно вообще не устанавливать компаратор и датчики тока.
Помехи возникают в основном в моменты коммутации обмоток двигателя, причем как «своей», так и «чужой» фазы. Для правильной работы схемы требуется корректная разводка печатной платы, особенно это касается земляных проводников. Возможно, придется подобрать номиналы ФНЧ на входе компаратора или даже ввести в компаратор небольшой гистерезис. Как уже отмечалось выше, при управлении маломощными двигателями от ШИМ-стабилизации тока можно вовсе отказаться, применив обычную L/R-схему питания обмоток. Для исключения ШИМ-стабилизации достаточно просто не подключать входы INT0 и INT1 микроконтроллера, естественно, при этом можно вообще не устанавливать компаратор и датчики тока.
В данной программе периодичность вычисления новых значений скорости и периода выбрана равной 15.625мс. Такое значение выбрано не случайно. Этот интервал составляет 1/64с, а главное, он содержит целое число периодов переполнения таймера 0 (25мкс). Удобно, если значения скорости и ускорения задаются в естественных единицах, т. е. в шагах в секунду и в шагах, деленных на секунду в квадрате. Для того чтобы иметь возможность в целочисленной арифметике вычислять мгновенную скорость 64 раза в секунду, нужно перейти к внутреннему представлению скорости, увеличенному в 64 раза. Умножение и деление на 64 сводится к обычным сдвигам и поэтому требует очень мало времени. Заданную периодичность вычислений обеспечивает еще один программный таймер URCNT, который декрементируется в прерывании таймера 0 (раз в 25мкс). Этот таймер всегда загружается постоянной величиной, что обеспечивает неизменный период его переполнений, равный 15.625мс. При переполнении этого таймера устанавливается битовый флаг UPD, который сигнализирует основной программе, что «пора-бы обновить значения скорости и периода».
е. в шагах в секунду и в шагах, деленных на секунду в квадрате. Для того чтобы иметь возможность в целочисленной арифметике вычислять мгновенную скорость 64 раза в секунду, нужно перейти к внутреннему представлению скорости, увеличенному в 64 раза. Умножение и деление на 64 сводится к обычным сдвигам и поэтому требует очень мало времени. Заданную периодичность вычислений обеспечивает еще один программный таймер URCNT, который декрементируется в прерывании таймера 0 (раз в 25мкс). Этот таймер всегда загружается постоянной величиной, что обеспечивает неизменный период его переполнений, равный 15.625мс. При переполнении этого таймера устанавливается битовый флаг UPD, который сигнализирует основной программе, что «пора-бы обновить значения скорости и периода».
Основная программа (рис. 34) выполняет вычисление мгновенных значений скорости и периода следования шагов, обеспечивая необходимую кривую разгона. В данном случае разгон и торможение осуществляются с постоянным ускорением, поэтому скорость меняется линейно. Период при этом меняется по гиперболическому закону, и его вычисление – основная работа программы.
Период при этом меняется по гиперболическому закону, и его вычисление – основная работа программы.
Рис. 34. Блок-схема основного цикла программы.
Обновление значений скорости и периода следования шагов основная программа делает периодически, периодичность задается флагом UPD. Обновление программа делает на основе сравнения значений двух переменных: мгновенной скорости VC и требуемой скорости VR.
Значение требуемой скорости также определяется в основной программе. Это делается на основе анализа управляющих сигналов и сигналов с концевых выключателей. В зависимости от этих сигналов, основная программа загружает переменную VR значением требуемой скорости. В данной программе это V для движения вперед, -V для движения назад и 0 для остановки. В общем случае, набор скоростей (а также ускорений и токов фаз) может быть сколь угодно большим, в зависимости от требований.
Если скорости VC и VR равны, значит, шаговый двигатель работает в стационарном режиме и обновления не требуется. Если же скорости не равны, то значение VC с заданным ускорением приближается к VR, т.е. двигатель ускоряется (или замедляется) до достижения номинальной скорости. В случае, когда даже знаки VR и VC отличаются, двигатель замедляется, реверсируется и потом достигает требуемой скорости. Происходит это как-бы само собой, благодаря структуре программы.
Если же скорости не равны, то значение VC с заданным ускорением приближается к VR, т.е. двигатель ускоряется (или замедляется) до достижения номинальной скорости. В случае, когда даже знаки VR и VC отличаются, двигатель замедляется, реверсируется и потом достигает требуемой скорости. Происходит это как-бы само собой, благодаря структуре программы.
Если при очередной проверке обнаруживается, что скорости VR и VC не равны, то к значению VC прибавляется (или вычитается) значение ускорения A. Если в результате этой операции происходит превышение требуемой скорости, то полученное значение корректируется путем замены на точное значение требуемой скорости.
Затем происходит вычисление периода T (рис. 35).
Рис. 35. Блок-схема подпрограммы вычисления периода.
Вначале вычисляется модуль текущей скорости. Затем происходит ограничение минимальной скорости. Это ограничение необходимо по двум причинам. Во-первых, бесконечно малой скорости соответствует бесконечно большой период, что вызовет ошибку в вычислениях. Во-вторых, шаговые двигатели имеют довольно протяженную по скорости зону старта, поэтому нет необходимости стартовать на очень маленькой скорости, тем более что вращение на малых скоростях вызывает повышенный шум и вибрацию. Значение минимальной скорости VMIN должно выбираться исходя из конкретной задачи и типа двигателя. После ограничения минимальной скорости производится вычисление периода по формуле T = 2560000/|VC|. На первый взгляд формула не очевидна, но если учесть, что период необходимо получить в 25мкс-интервалах, а внутреннее представление VC – это умноженное на 64 ее истинное значение, то все становится на свои места. При вычислении T требуется операция беззнакового деления формата 24/24, которое AVR на тактовой частоте 10МГц делает примерно за 70мкс. Учитывая, что вычисления периода происходят не чаще, чем один раз в 15.625мс, загрузка процессора получается очень низкой. Основную загрузку производит прерывание таймера 0, да и оно в основном выполняется по короткой ветке (без переполнения STCNT) длительностью примерно 3мкс, что соответствует 12%-й загрузке процессора.
Во-вторых, шаговые двигатели имеют довольно протяженную по скорости зону старта, поэтому нет необходимости стартовать на очень маленькой скорости, тем более что вращение на малых скоростях вызывает повышенный шум и вибрацию. Значение минимальной скорости VMIN должно выбираться исходя из конкретной задачи и типа двигателя. После ограничения минимальной скорости производится вычисление периода по формуле T = 2560000/|VC|. На первый взгляд формула не очевидна, но если учесть, что период необходимо получить в 25мкс-интервалах, а внутреннее представление VC – это умноженное на 64 ее истинное значение, то все становится на свои места. При вычислении T требуется операция беззнакового деления формата 24/24, которое AVR на тактовой частоте 10МГц делает примерно за 70мкс. Учитывая, что вычисления периода происходят не чаще, чем один раз в 15.625мс, загрузка процессора получается очень низкой. Основную загрузку производит прерывание таймера 0, да и оно в основном выполняется по короткой ветке (без переполнения STCNT) длительностью примерно 3мкс, что соответствует 12%-й загрузке процессора. Это означает, что имеются значительные резервы вычислительных ресурсов.
Это означает, что имеются значительные резервы вычислительных ресурсов.
Печатная плата контроллера шагового двигателя приведена на рис. 36.
Рис. 36. Печатная плата контроллера шагового двигателя.
Приведенная демонстрационная программа не имеет многих функций, которые должны присутствовать в законченном контроллере шагового двигателя. Реализация этих функций сильно зависит от особенностей применения конкретного шагового двигателя и вряд ли может быть сделана универсальной. В то же время приведенная программа может служить основой для написания специальных программ, обладающих тем или иным набором возможностей. Например, на основе данной платы создан ряд специализированных контроллеров шаговых двигателей. Одна из моделей такого контроллера обладает следующими возможностями:
- максимальная частота коммутации фаз 3 Кгц
- разгон с постоянным ускорением
- программируемое направление вращения
- программируемое ускорение
- программируемый средний ток обмоток
- программируемый ток удержания
- режим перемещения на N шагов
- полушаговый режим
- формирователь импульса привязки с программируемой задержкой
- хранение основных параметров в энергонезависимой памяти
- один внешний источник питания
- управление по интерфейсу RS-232C или местное
- адресация до 7 устройств на одном RS-232C
Контроллер шагового двигателя SMSD-822 ver.
 2 с напряжением питания 220В
2 с напряжением питания 220В
Заказать
Описание в PDF
| Напряжение питания переменного тока, В | 110 – 220 |
| Напряжение питания постоянного тока, В | 70 – 200 |
| Максимальный выходной ток, А | 8,0 |
| Коэффициент дробления полного шага | 1/2…1/256 |
| Количество каналов управления шаговыми двигателями | 1 |
| Точность установки частоты, % | не хуже 0,2 |
Скачать паспорт .pdfОписание .pdf Программа .zip
Программируемый контроллер SMSD‑822 ver.2 предназначен для управления работой гибридного двух- или четырехфазного шагового двигателя с током фазы от 5. 5А до 8.0А. Контроллер имеет пять режимов работы, а также позволяет настраивать смещение тока подключенного двигателя для обеспечения равномерности движения и уменьшения шумов во время работы. Контроллер имеет возможность осуществлять дробление шага до 1/256.
5А до 8.0А. Контроллер имеет пять режимов работы, а также позволяет настраивать смещение тока подключенного двигателя для обеспечения равномерности движения и уменьшения шумов во время работы. Контроллер имеет возможность осуществлять дробление шага до 1/256.
Режимы управления
- Аналоговое управление скоростью встроенным потенциометром, внешним потенциометром или аналоговым сигналом 0…5В;
- Импульсное управление положением внешними сигналами «ШАГ», «НАПРАВЛЕНИЕ», «РАЗРЕШЕНИЕ» или двухфазным квадратурным сигналом, со смещением фаз 90°;
- Следящий режим – аналоговое управление положением — управление внешним сигналом 0-5В или потенциометром;
- Автономная работа по заданной программе — запись программы в энергонезависимую память блока с ПК и дальнейшая автономная отработка сохраненной последовательности команд. Внешний контроллер или компьютер в этом режиме не требуются;
- Программное управление в режиме реального времени (directcontrol) — непосредственное управление командами с ПК или ПЛК в режиме реального времени.
Описание функций
- В режиме контроллера для синхронизации работы блока с другим оборудованием предусмотрено 4 программируемых входа/выхода, также доступна функция «поиска нулевого положения»;
- Для управления блоком в режиме контроллера предназначена программа SMC-Program, или иная программа, обеспечивающая передачу данных по последовательному интерфейсу;
- Для управления скоростью в режиме аналогового управления предусмотрен вход для подачи сигнала 0–5В, направление вращения изменяется по датчику «Реверс», предусмотрен вход для подключения аварийного датчика.
Конструкция контроллера шагового двигателя SMSD‑822 ver.2.
Контроллер SMSD‑822 ver.2 выполнен в виде печатной платы с расположенными на ней электронными компонентами, элементами индикации, органами управления, клеммами и разъемами. Печатная плата установлена на теплоотводящий радиатор и защищена металлической крышкой с нанесенными на нее условными графическими изображениями органов управления и пояснительными надписями.
Печатная плата установлена на теплоотводящий радиатор и защищена металлической крышкой с нанесенными на нее условными графическими изображениями органов управления и пояснительными надписями.
- винтовые клеммы для подключения источника питания;
- шаговый двигатель;
- разъем на 25 контактов для подключения входных/выходных сигналов;
- кнопки пуска «START», сброса «RESET», функции поиска нуля «HOME»;
- потенциометр регулировки скорости и настройки работы шагового двигателя, а также для управления положением в следящем режиме: «SPEED/TUNING»;
- микропереключатели SW1 – SW8;
- два светодиодных индикатора;
- разъем USB для связи с компьютером;
- винт для подключения клеммы защитного заземления «PE».
Описание контроллера SMSD‑822 ver.2
 youtube.com/embed/ic-BPLVnkQQ?enablejsapi=1&origin=https%3A%2F%2Felectroprivod.ru» allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»» data-gtm-yt-inspected-59002865_34=»true» data-gtm-yt-inspected-7=»true» title=»1. SMSD-822 ver.2. Описание.»>
youtube.com/embed/ic-BPLVnkQQ?enablejsapi=1&origin=https%3A%2F%2Felectroprivod.ru» allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»» data-gtm-yt-inspected-59002865_34=»true» data-gtm-yt-inspected-7=»true» title=»1. SMSD-822 ver.2. Описание.»>
Настройка контроллера для плавной и тихой работы шагового двигателя
Контроллер SMSD‑822 ver.2 имеет режим “Tuning” используется при первоначальном подключении или замене шагового двигателя. Он обеспечивает настройку смещения токов в фазах ШД и позволяет добиться равномерности вращения и уменьшения акустических шумов. Режим настройки простой и может использоваться неподготовленными пользователями. После подачи питания и начала работы двигателя в режиме “Tuning” потенциометром SPEED/TUNINGпроизводится регулировка для наиболее плавного вращения вала двигателя с минимальной вибрацией и шумом. После достижения наилучшего результата настройки записываются в память блока при нажатии на кнопку HOME контроллера. После этого можно переходить в требуемый режим работы: аналоговое, импульсное или программное управление шаговым приводом.
После этого можно переходить в требуемый режим работы: аналоговое, импульсное или программное управление шаговым приводом.
Подключение шагового двигателя к контроллеру SMSD‑822 ver.2
Подключение шагового двигателя к контроллеру SMSD‑822 ver.2.
Заземление блока. Подача питания. Режим настройки блока.
Управление шаговым приводомв режиме аналогового регулирования скорости
В следящем режиме контроллер позволяет управлять положением вала двигателя потенциометром или аналоговым сигналом 0…5В. Режим широко используется в системах видеонаблюдения, в оборудованиипозиционирования антенни других подобных устройствах.
Режим широко используется в системах видеонаблюдения, в оборудованиипозиционирования антенни других подобных устройствах.
При входе контроллера в следящий режим нулевая координата определяется положением встроенного (или внешнего) потенциометра или напряжением, поданным на входы контроллера. При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
Переключение направления вращения двигателя осуществляется изменением уровня сигнала на входе DIR. Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Управление блоком в ручном режиме
Импульсное управления шаговым приводом
В режиме импульсного управления на входы контроллераподается последовательность сигналов ШАГ (входы PUL), НАПРАВЛЕНИЕ (входы DIR), РАЗРЕШЕНИЕ (вход EN). Входы PUL и DIR двунаправленные, полярность подключения сигналов не важна. Пример схемы подключения приведен на рисунках далее.
Переключение направления вращения двигателя осуществляется изменением уровня сигнала на входе DIR. Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Пример схемы подключения — управляющие сигналы типа NPN
Пример схемы подключения — управляющие сигналытипа PNP
Использование шагового привода в режиме слежения
В следящем режиме контроллер позволяет управлять положением вала двигателя потенциометром или аналоговым сигналом 0…5В. Режим широко используется в системах видеонаблюдения, в оборудованиипозиционирования антенни других подобных устройствах.
При входе контроллера в следящий режим нулевая координата определяется положением встроенного (или внешнего) потенциометра или напряжением, поданным на входы контроллера. При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
Переключение направления вращения двигателя осуществляется изменением уровня сигнала на входе DIR. Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Подключение управляющих сигналов в следящем режиме
Величину ускорения, начальную и конечную скоростиперемещения для следящего режима можно задаватькомандойс компьютера по коммуникационному интерфейсу. Также можно указывать масштаб сигнала, который определяет полный диапазон перемещения. Все эти команды сохраняются в памяти блока и дальнейшего подключения к компьютеру в данном режиме не требуется.
Также можно указывать масштаб сигнала, который определяет полный диапазон перемещения. Все эти команды сохраняются в памяти блока и дальнейшего подключения к компьютеру в данном режиме не требуется.
Пример задания масштаба: Задаётся команда масштабирования SC1000*. Поданное управляющее аналоговое напряжение 2.5В считается за нулевую координату. Изменяя напряжение от 2.5В до 5В, можно повернуть вал двигателя в одну сторону на 500 шагов; изменяя напряжение от 2.5В до 0В, можно повернуть вал двигателя на 500 шагов в другую сторону.Шаги в данном случае — это шаги с учётом выставленного дробления. Описание всех команд приведено в технической документации блока.
Использование режимов драйвера и слежения на блоке управления шаговым двигателем SMSD‑822 ver.2
 Режим драйвера и режим слежения.»>
Режим драйвера и режим слежения.»>
Использование шагового привода в режиме слежения
Существует два возможных способа работы в режиме контроллера: управление в режиме реального времени (directcontrol) и автономная работапо программе.
Для работы в режиме реального времени необходимо постоянное соединение блока управления SMSD—822 ver.2 с компьютером. При этом каждую полученную от компьютера команду контроллер отрабатывает немедленно. При автономной работе необходима предварительная запись исполнительной программы в память блока, после чего возможна работа без подключения к компьютеру. Для составления и записи программы в контроллер, а также для передачи команд в режиме реального времени можно использовать программу SMC-Program (предоставляется при покупке контроллера, а также доступна для скачивания с нашего сайта), либо другое ПО, предоставляющее возможность передачи данных по последовательному интерфейсу.
Функция поиска начального положения: в режиме контроллера предусмотрена функция поиска начального положения. Для запуска поиска начального положения можно воспользоваться кнопкой HOME или замыкать контакты, подключенные к дублирующим входам HOME/COM. Также поиск начального положения можно инициировать командой от компьютера. Сигнал HOME работает по фронту. Остановка осуществляется поступлением сигнала на вход «0»/COM, к которому подключается концевой выключатель.Остановка также осуществляется при нажатии кнопки RESETили замыкании дублирующих входов RESET/COM. Если функция поиска начального положения была запущена кнопкой HOME или замыканием дублирующих клемм, скорость перемещения регулируется потенциометром SPEED во время движения; если функция была запущена командой, скорость можно задавать командой. Изменение направления вращения осуществляется подачей сигнала на вход DIR — сигнал работает по фронту.
Подключение входных управляющих сигналов при использовании блока в режиме контроллера
Подключение сигналов IO1, IO2, IO3, IO4 в качестве входов при использовании блока в режиме контроллера
Подключение сигналов IO1, IO2, IO3, IO4 в качестве выходов при использовании блока в режиме контроллера
Габаритные размеры драйвера шаговых двигателей SMSD‑822 ver.
 2
2
Заполните, пожалуйста, форму обратной связи,
и мы свяжемся с вами в ближайшее время.
ФИО
Телефон
Комментарий
Подтверждаю согласие на обработку персональных данных
и принимаю политику конфиденциальности
Выбираем драйвер шагового двигателя
Шаговый двигатель — двигатель со сложной схемой управления, которому требуется специальное электронное устройство — драйвер.
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4, LinuxCNC или PureMotion.
Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4, LinuxCNC или PureMotion.
Задача драйвера — изменять ток в обмотках как можно более эффективно. Поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т. п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1. Драйверы постоянного напряжения. Эти драйверы подают постоянный уровень напряжения поочередно на обмотки. Результирующий ток зависит от сопротивления обмотки, а на высоких скоростях — и от индуктивности. Эти драйверы крайне неэффективны и могут быть использованы только на очень малых скоростях.
2. Двухуровневые драйверы. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны. Помимо прочего, они снижают нагрев двигателей. Их все еще можно иногда встретить в высококлассном оборудовании. Однако такие драйверы поддерживают только режим шага и полушага.
3. Драйверы с ШИМ. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны. Практически все представленные сейчас на рынке драйверы как раз этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижении током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем. Иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ.
Однако ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ.
Лучше, если частота драйвера будет более 20 кГц. И вообще, чем она больше, тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, в результате шаговые моторы начинают издавать неприятный писк.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные.
Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей. Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т. п.
При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т. п.
Cила тока
Первый параметр, на который стоит обратить внимание, — это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя.
Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15–40 % больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель. С другой стороны, не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Напряжение питания
Второй момент — это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8–10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин, стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя, тем большее напряжение требуется для драйвера.
Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8–10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин, стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя, тем большее напряжение требуется для драйвера.
Существует эмпирическая формула U = 32 * √(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера. U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы PLD86, PLD880.
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.
Назад к списку
Управление шаговым двигателем через контроллер Canny / Хабр
Наткнулся недавно на статью камрада BosonBeard про новые контроллеры и решил попробовать на зуб что это такое. Недолго думая были раздобыты 3 типа контроллеров: Canny 3 Tiny, Canny 5 Nano, Canny 7.
Рис. 1. Внешний вид упаковки контроллеров Canny 7 (слева), Canny 5 Nano (в центре), Canny 3 Tiny (справа), шариковая ручка для масштаба
Рис. 2. Внешний вид контроллеров Canny 7 (слева), Canny 5 Nano (в центре), Canny 3 Tiny (справа), шариковая ручка для масштаба
На что стоит обратить внимание… сердцем контроллеров являются чипы семейства PIC — PIC18F25K50-I/ML, PIC18F25K80, PIC24HJ128GP506A-I/PT — соответственно. Про возможности каждого чипа можно прочитать из даташитов производителя, так что не будем заострять на этом внимание. Из особенностей могу добавить только, что у модели Canny 5 Nano есть внешний TTL-USB драйвер на чипе CP2102. На счет подключения и впаянных разъемов на моделях Canny 7 и Canny 3 переживать не стоит, т.к. производитель укомплектовывает поставку солидным пучком проводов с запаянными разъемами.
На счет подключения и впаянных разъемов на моделях Canny 7 и Canny 3 переживать не стоит, т.к. производитель укомплектовывает поставку солидным пучком проводов с запаянными разъемами.
Применение чипов семейства PIC было неожиданностью. Хотя сам я не большой их поклонник, свою нишу они определенно занимают не зря. К слову, система защиты от протечек “аквасторож” тоже построена на чипах PIC.
Схема подключения полностью стандартная, так что двигаемся дальше. Душой контроллера является собственная прошивка, разработанная производителем и целиком совместимая с визуальной средой программирования, которая достаточно подробно была описана BosonBeard, а кому этого было недостаточно, может смело пойти почитать форумы, несмотря на то, что контроллеры не имеют широкого массового применения, комьюнити собралось приличное.
Т.к. все что можно было рассказать про сами контроллеры уже рассказано, а повторяться скучно, посмотрим, как их можно использовать для решения практической задачи управления шаговым двигателем.
Внимание! Собственный бутлоадер и графическая среда программирования накладывают определенные ограничения — невозможность использования стандартных библиотек. Но когда это нас останавливало?)
Не уверен что использовать подобный контроллер в качестве полноценного драйвера шагового двигателя даже для настольного ЧПУ или 3D принтера рационально, но для простого поворотного столика для создания моделей или съемки думаю реально.
От старого проекта у меня лежал неиспользованный старенький ДШИ-200 и самодельный драйвер к нему.
Рис.3. Мой старый драйвер шагового двигателя, на рисунке можно увидеть 3 канала управления
Это делает задачу немного интересней, так как готовые примеры рассчитаны на использование обычных сейчас 2-х обмоточных двигателей, в то время как ДШИ-200 — четырехобмоточный с двумя выводами с каждой обмотки.
Для сравнения, стандартная программа управления выглядит так:
А то что изобразил я, для управления своим двигателем выглядело так:
Почему такая разница в программах? Во-первых для таймлапса не надо организовывать реверс, т. е. достаточно вращения двигателя в одну сторону. Во-вторых — особенности самого двигателя, который может быть включен как по униполярной, так и по биполярной схеме. Так что нам подойдет униполярная схема:
е. достаточно вращения двигателя в одну сторону. Во-вторых — особенности самого двигателя, который может быть включен как по униполярной, так и по биполярной схеме. Так что нам подойдет униполярная схема:
В качестве платформы для таймлапса я использовал слегка измененный поворотный стол от 3д сканера cyclopus:
Достоинства и недостатки.
По традиции начнем с недостатков:
Закрытый бутлоадер
Отсутствие возможности подключения внешних библиотек
Из достоинств:
Графическая среда программирования — да, это непривычно, но это снижает порог вхождения
Высокая скорость разработки программ
Простота настройки и наладки программ “по месту” в полевых условиях
Развитое сообщество и поддержка разработчиков
Выводы
Не смотря на то, что контроллер достаточно специфичный и относится больше к узкоспециализированному профессиональному классу, производитель позаботился и о простых смертных. Это действительно сопоставимо со временем написания программ на Arduino. Но если взять более сложные программы, Arduino в проигрыше из-за сложности восприятия кода. Всетаки “картинку” мозг воспринимает быстрей чем текст. Кроме того, человеку который не участвовал в изначальной разработке кода проще будет его разобрать по картинке. Конечно визуальная среда разработки добавляет в загружаемый код хлама, но для сложных задач можно выбрать другой контроллер с большим объемом памяти… в общем каждый сам решает что ему важнее.
Это действительно сопоставимо со временем написания программ на Arduino. Но если взять более сложные программы, Arduino в проигрыше из-за сложности восприятия кода. Всетаки “картинку” мозг воспринимает быстрей чем текст. Кроме того, человеку который не участвовал в изначальной разработке кода проще будет его разобрать по картинке. Конечно визуальная среда разработки добавляет в загружаемый код хлама, но для сложных задач можно выбрать другой контроллер с большим объемом памяти… в общем каждый сам решает что ему важнее.
Уверен что многие вспомнят визуальную среду программирования Arduino — ArduBlock, которая умеет поддерживать библиотеки различных модулей и протоколов. Однако для чипов PIC ничего такого не было. Да и вообще с того момента как массово стали использовать Arduino про аналогичные устройства на PIC большинство из нас забыло. О достойной альтернативе говорить сложно, но это однозначно шаг вперед.
Мне было любопытно что это за контроллеры и что они умеют и я на данный момент удовлетворил свое любопытство. Я не придумал красивое окончание статьи, так что всем прочитавшим — спасибо за внимание.
Я не придумал красивое окончание статьи, так что всем прочитавшим — спасибо за внимание.
Контроллеры шагового двигателя в Украине. Цены на контроллеры шагового двигателя на Prom.ua
4-осевой контроллер шаговых двигателей ЧПУ, 100кГц SP
Доставка по Украине
2 476.58 грн
1 238.29 грн
Купить
Shoppes
4-осевой контроллер шаговых двигателей ЧПУ 100кГц
Доставка по Украине
1 015 — 1 223 грн
от 7 продавцов
1 248 грн
1 223 грн
Купить
ІНТЕРНЕТ-МАГАЗИН «ЗАКУПИСЬ»
4-осевой контроллер шаговых двигателей ЧПУ, 100кГц
На складе
Доставка по Украине
1 015 грн
Купить
KRONS интернет- магазин
Контроллер Arduino UNO R3 + CNC shield v3 (шилд ЧПУ) + 4 драйвера шагового двигателя A4988
Заканчивается
Доставка по Украине
537.50 грн
Купить
Radio Store
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 4 A 9-40 В
4 A 9-40 В
На складе в г. Полтава
Доставка по Украине
409.40 грн
Купить
Интернет магазин «E-To4Ka»
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 0.2 — 5 A
На складе в г. Полтава
Доставка по Украине
659.40 грн
Купить
Интернет магазин «E-To4Ka»
4-осевой контроллер шаговых двигателей ЧПУ, 100кГц
Доставка по Украине
1 015 — 1 106 грн
от 2 продавцов
1 015 грн
Купить
АльтМаркет — интернет магазин
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 4 A 9-40 В
Доставка из г. Полтава
по 412 грн
от 2 продавцов
412 грн
Купить
РезиStore
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 0.2 — 5 A HY-DIV268N-5A
Доставка по Украине
по 662.3 грн
от 2 продавцов
662.30 грн
Купить
РезиStore
4-осевой контроллер шаговых двигателей ЧПУ, 100кГц
Доставка по Украине
1 015 грн
Купить
freedelivery
Контроллер шаговых двигателей ЧПУ 4-осевой, 100кГц
На складе в г. Ровно
Ровно
Доставка по Украине
1 015 грн
Купить
Double-Shop
TB6600 Контроллер/драйвер шагового двигателя ЧПУ 0.2 — 5 A
Доставка из г. Полтава
662.30 грн
Купить
Интернет-магазин «Налетай»
TB6600 Контроллер/драйвер шагового двигателя ЧПУ. 4 A 9-40 В
Доставка из г. Полтава
412 грн
Купить
Интернет-магазин «Налетай»
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 4 A 9-40 В
На складе в г. Полтава
Доставка по Украине
409.60 грн
Купить
IT Electronics
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 0.2 — 5 A
На складе в г. Полтава
Доставка по Украине
658 грн
Купить
IT Electronics
Смотрите также
Контроллер шагового двигателя DRV8833 MOD для 3D-принтера (12171)
Доставка по Украине
78 грн
Купить
beegreen
Комплект шаговые моторы (NEMA 34)+драйвера(MA860H)+плата контролер для трёх осей на ЧПУ+блок питания 400W
На складе
Доставка по Украине
25 237 грн/комплект
22 736 грн/комплект
Купить
LP Shopping
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 0.2 — 5 A HY-DIV268N-5A
0.2 — 5 A HY-DIV268N-5A
Доставка из г. Полтава
662.30 грн
Купить
МегаШара — Интернет-магазин
Контроллер/драйвер шагового двигателя ЧПУ TB6600. 4 A 9-40 В
Доставка из г. Полтава
412 грн
Купить
МегаШара — Интернет-магазин
Новинка 4-осевой контроллер шаговых двигателей ЧПУ, 100кГц !
Доставка по Украине
1 269 грн
1 015 грн
Купить
Economic — 50 тыс.товаров
Драйвер контроллер шагового двигателя CW5045
Доставка по Украине
2 060 грн
Купить
Tesla PTG
Драйвер (контроллер) шагового двигателя 2DM556
Доставка по Украине
2 200 грн
Купить
ООО Рефит
Драйвер (контроллер) шагового двигателя 2DM860
Доставка по Украине
2 850 грн
Купить
ООО Рефит
Драйвер (контроллер) шагового двигателя 2DM542
Доставка по Украине
1 476 грн
Купить
ООО Рефит
A3967 модуль контроллер шагового двигателя
Доставка из г. Днепр
Днепр
87.70 грн
Купить
Інтернет-магазин «Електроніка»
DRV8825 модуль контроллер шагового двигателя
Доставка из г. Днепр
186.20 грн
Купить
Інтернет-магазин «Електроніка»
3-осевой контроллер шаговых двигателей ЧПУ TB6560
Доставка по Украине
200 грн
Купить
Saga Market
Магниты неодимовые сильные 15×3мм N35 10шт
Доставка по Украине
по 200 грн
от 11 продавцов
200 грн
Купить
P&BShop
A4988 модуль контроллер шагового двигателя
На складе в г. Днепр
Доставка по Украине
55 грн
Купить
магазин Компонент
Контроллер шаговый двигатель схема
Контроллер шагового двигателя
Контроллер шагового двигателя в радиолюбительской литературе опубликовано много описаний устройств управления шаговыми двигателями, этот контроллер шагового двигателя, имеющее ряд отличий и достоинств. Предлагаемый контроллер биполярного шагового двигателя построен из небольшого числа легкодоступных дешёвых деталей, имеет маленький потребляемый ток и может быть адаптирован для применения в различных устройствах.
Применение двухполярного питания выходных электронных ключей дало возможность вдвое уменьшить их число и получить режим остановки двигателя, в котором через его обмотки не течёт ток. Управляющая программа обеспечивает фиксированную длительность рабочих импульсов при любой частоте шагов, что избавило ключевые транзисторы от излишнего нагрева. Использование для управления ключами оптронов даёт развязку по питанию, возможность независимого питания узла управления и ключей, коммутирующих обмотки двигателя.
Схема контроллер шагового двигателя изображена на рисунке. Узел управления построен на микроконтроллере DD1 (PIC16F84A-04/P). Назначение кнопок управления следующее: SB1 — вращение по часовой стрелке; SB2 — вращение против часовой стрелки; SB3 — увеличение частоты шагов; SB4 — уменьшение частоты шагов; SB5 — стоп. Значения напряжения питания шагового двигателя +11шд и —11шд зависят от его типа, но не должны по абсолютному значению превышать 27 В — половины допустимого для фототранзисторов применённых оптронов напряжения коллектор—эмиттер. Чертёж печатной платы контроллер шагового двигателя и размещение деталей на ней показаны на рисунке размеры платы 76×53.
Чертёж печатной платы контроллер шагового двигателя и размещение деталей на ней показаны на рисунке размеры платы 76×53.
Для микроконтроллера на плате устанавливают панель, в которую его вставляют уже запрограммированным. Исходный текст программы микроконтроллера содержит все необходимые комментарии, и при необходимости её можно изменять, например, ввести полушаговый режим управления двигателем или, используя свободные порты микроконтроллера, добавить конечные выключатели для ограничения сектора вращения, или задавать нужное число шагов. Стоит отметить, что необходимая очерёдность открывания транзисторов VT1—VT4 реализована в программе с учётом трассировки печатной платы.
Правильно собранный контроллер шагового двигателя не требует налаживания. В нём в качестве VT1—VT4 можно использовать любые комплементарные пары транзисторов средней мощности, например, серий КТ814 и КТ815, КТ816 и КТ817, КТ972 и КТ973 или аналогичные импортные. Подходящие транзисторные оптроны можно найти в любом импульсном блоке питания, где их широко используют. Прошивку и печатную плату берем тут
Прошивку и печатную плату берем тут
Работа схемы
В следующих двух таблицах представлены схемы соединений входных и выходных контактов драйверов моторов ULN2003 или L293D с микроконтроллером AVR ATmega16 и шаговым электродвигателем.
| Atmega16 | ULN2003 | L293D |
| A0 | IN1(PIN1) | IN1(PIN2) |
| A1 | IN2(PIN2) | IN2(PIN7) |
| A2 | IN3(PIN3) | IN3(PIN10) |
| A3 | IN4(PIN4) | IN4(PIN15) |
| Шаговый двигатель | ULN2003 | L293D |
| Orange | OUT1(PIN16) | OUT1(PIN3) |
| Yellow | OUT2(PIN15) | OUT2(PIN6) |
| Pink | OUT3(PIN14) | OUT3(PIN11) |
| Blue | OUT4(PIN13) | OUT4(PIN14) |
Схема устройства с драйвером мотора ULN2003 приведена на следующем рисунке.
Схема этой же самой конструкции, но с драйвером мотора L293D, будет выглядеть следующим образом.
Внешний вид устройства с использованием ULN2003 приведен в начале статьи, а с использованием L293D он будет выглядеть следующим образом:
Соедините все компоненты устройства в соответствии с приведенной схемой соединений (одной из двух). Для управления шаговым двигателем мы будем использовать PORTA микроконтроллера Atmega16. К контактам шагового двигателя нет необходимости подключать питание – для управления им нам понадобятся только контакты его катушек (coil pins) – верно для ULN2003, для L293D немного по другому. Очень важен порядок контактов для того чтобы шаговый двигатель работал корректно. Для микросхемы ULN2003 используются четыре ее входа и четыре ее выхода – входы соединяются с контактами PORTA микроконтроллера, а выходы – с сигнальными контактами шагового двигателя. Также подсоедините кнопку к контакту сброса (Reset pin) чтобы иметь возможность осуществлять сброс микроконтроллера Atmega16 всегда, когда нам это понадобится. Подсоедините к микроконтроллеру кварцевый генератор. Все устройство должно быть запитано напряжением 5В.
Подсоедините к микроконтроллеру кварцевый генератор. Все устройство должно быть запитано напряжением 5В.
PIC-контроллер управляет электродвигателем
В этой подборке рассказывается о двух конструкциях на PIC-контроллере, описанных на веб-сайте японского радиолюбителя Seiichi Inoue. Первая из них предназначена для управления частотой вращения электродвигателя постоянного тока, вторая — шагового электродвигателя.
Устройство выполнено на микроконтроллере (МК) PIC16F873. Его тактовую частоту (10 МГц) задает кварцевый резонатор ZQ1. Питание на основной электродвигатель М1 подается через мощный полевой транзистор VT2, на затвор которого через согласующий каскад на транзисторе VT1 поступают прямоугольные импульсы с выхода ССР1 микроконтроллера
Частота импульсов постоянна, а скважность можно изменять, регулируя, таким образом, частоту вращения ротора двигателя
Вал электродвигателя М1 механически (через зубчатую двухступенчатую передачу 1:1) связан со вторым электродвигателем, который используется в качестве генератора. Вырабатываемое им напряжение через диодный мост VD1 и делитель напряжения R1 — R3 поступает на вход AN0 аналого-цифрового преобразователя, входящего в состав МК. Стабилитрон VD2 с напряжением стабилизации 5 В защищает этот вход от повреждения, конденсатор С5 сглаживает пульсации выпрямленного напряжения.
Вырабатываемое им напряжение через диодный мост VD1 и делитель напряжения R1 — R3 поступает на вход AN0 аналого-цифрового преобразователя, входящего в состав МК. Стабилитрон VD2 с напряжением стабилизации 5 В защищает этот вход от повреждения, конденсатор С5 сглаживает пульсации выпрямленного напряжения.
Требуемую частоту вращения устанавливают переменным резистором R2 с функциональной характеристикой А.
Рост напряжения, поступающего на вход AN0, свидетельствует о том, что частота вращения вала двигателя увеличивается. В ответ на это МК уменьшает длительность импульсов на выходе ССР1, и частота вращения возвращается к прежнему значению. При уменьшении напряжения, вырабатываемого двигателем-генератором, длительность импульсов возрастает и частота вращения повышается.
Линейка светодиодов HL1 — HL8 позволяет визуально контролировать частоту вращения вала двигателя: число светящихся светодиодов растет с ее увеличением.
Питается устройство стабилизированным напряжением 5 В, снимаемым с выхода интегрального стабилизатора DA1. На двигатель М1 поступает нестабилизированное напряжение от отдельного источника. Регулятор собран на макетной плате размерами 70×45 мм.
Устройства управления шаговым двигателем обычно содержат сдвиговые регистры, формирующие необходимую последовательность импульсов, поступающих на обмотки.
Предлагаемое устройство на PIC-контроллере позволяет также изменять направление и регулировать частоту вращения ротора. Описание конструкции, чертеж монтажной платы и комментированные исходные коды программы микроконтроллера размещены по этой ссылке
Основной служит МК PIC16F84A. Тактовую частоту (4 МГц) задает кварцевый резонатор ZQ1. На элементах R8-R10, С6 и транзисторе VT5 собран генератор, частоту которого можно плавно изменять переменным резистором R9 с функциональной характеристикой А. Напряжение с конденсатора С6 поступает на вход RB5 МК DD1. После того как оно превысит пороговое, на выходе RB7 появляется напряжение высокого уровня. Открывшийся транзистор VT5 разряжает конденсатор, после чего цикл повторяется.
При перемещении движка резистора R9 из одного крайнего положения в другое частота вращения двигателя М1 изменяется от 27 до 128 мин-1. Следует учесть, что при увеличении частоты вращения снижается момент на валу двигателя. Устройство не имеет обратной связи, поэтому частота вращения зависит как от сопротивления введенной части резистора R9, так и от нагрузки на валу.
Выходы RA0 — RA3 МК через ключи, выполненные на составных транзисторах VT1 — VT4, коммутируют напряжения на обмотках шагового двигателя. Диоды VD1 — VD4 защищают транзисторы от пробоя импульсами напряжения, возникающими в момент их закрывания.
К первым трем разрядам порта RB (RB0 — RB2) МК подключены кнопки SB1 — SB3, с помощью которых изменяют направление вращения вала двигателя и останавливают его.
Стабилизаторы 78L05 и 7805 заменимы отечественными КР142ЕН5А (В), транзистор 2SC1815 — любым из серии КТ3102, стабилитрон RD-5A — отечественным КС147А. Транзисторы VT1-VT4 (см. рис. 2) должны выдерживать ток обмоток двигатели и иметь коэффициент передачи тока базы около 4000. Выпрямительный мост VD1 (см. рис. 1) — КЦ407А или собранный из маломощных кремниевых диодов. Светодиоды HL1 — HL8 — любые из серии АЛ307.
| C этой схемой также часто просматривают: |
ГЕНЕРАТОР ИМПУЛЬСОВ НА PIC-КОНТРОЛЛЕРЕ Контроллер шагового двигателя Как сделать простой программатор для PIC-ов и AVR-ов Универсальный велосипедный путевой прибор на PIC контроллере Передача отладочной информации из PIC-контроллера через COM-порт PIC-контроллер в автомобильных часах LCD-термометр на микроконтроллере DDS генератор на микроконтроллере Светодиодные «наперстки» на микроконтроллере
Схема униполярных и биполярных шаговых двигателей
Вначале рассмотрим униполярный шаговый двигатель, ввиду простоты управления. В таком моторе ток в обмотке всегда течет в одном направлении. Это упрощает метод управления, в отличие от биполярного, где управление должно обеспечивать изменение полярности катушек шагового двигателя путем изменения направления тока через обмотку на противоположное.
Двух переключателей достаточно, чтобы построить простейший драйвер шагового двигателя, как показано на рисунке. Здесь используем 6-проводный униполярный двигатель. Также можно сказать, что двигатель в этом случае управляется однополярно, за счет использования средней обмотки катушки и постоянного напряжения питания на нее.
Переключая данные переключатели в последовательности S1, S2, S1, S2, S1, S2… заметим, что двигатель вращается. Рисунок выше иллюстрирует важный принцип управления: обе обмотки не могут питаться от одной пары одновременно. Каждое изменение переключателя поворачивает ротор на один шаг. Чем быстрее начнем переключать переключатели в последовательности S1, S2, S1, S2…, тем быстрее начнет вращаться ротор.
Подключение переключателей к катушкам шагового двигателя
Скорость шагового двигателя зависит не от величины напряжения, а от скорости подключения питания к отдельным обмоткам. Чтобы добиться полного вращения ротора с 200-шаговым двигателем, надо изменить положение каждого переключателя 100 раз, то есть выполнить до 200 последовательностей для двух переключателей. Это уже говорит о том, что шаговые двигатели не могут работать на высокой скорости. Из этого следует, что шаговые двигатели можно назвать «цифровыми двигателями», поскольку для вращения ротора необходимо переключать переключатели в соответствующей последовательности.
В нашем случае последовательность переключений также определяет направление вращения шагового двигателя. Когда меняем последовательность включения переключателей, то меняем и направление вращения, например S2, S1, S2, S1, S2, S1… влево, S1, S2, S1, S2, S1, S2… вправо. В этом примере есть двухпозиционные переключатели, которые всегда обеспечивают питание двух из четырех обмоток шагового двигателя в данный момент. Но использование трехпозиционных переключателей дает гораздо больше возможностей.
Опять же, обе обмотки никогда не питаются от одной пары, что является обязательным принципом управления шаговым двигателем. Благодаря трехпозиционным переключателям можно реализовать, например, полушаговое управление, благодаря разнообразию переключений. Одновременно могут быть под напряжением две, одна или ни одной из обмоток.
Упрощенная схема управления униполярным шаговым двигателем
Чтобы управлять таким мотором, надо обеспечить соответствующую последовательность импульсов. Например, только одна из четырех обмоток шагового двигателя находится под напряжением одновременно (это своего рода волновое управление). На каждый цикл двигателя подается питание на одну из четырех катушек униполярного шагового двигателя. Вращение его будет выглядеть так:
Вращение униполярного шагового двигателя в последовательных тактах цикла управления волной
Управляющая последовательность A +, B +, A-, B- повторяется каждые четыре импульса тактового генератора. Этот тип управления называется однофазным или волновым. Это полный шаг управления, потому что двигатель выполняет один полный ход (шаг) с одним импульсом генератора.
Самый простой способ изменить направление — поменять местами одну пару проводов катушки (поменять местами, например, B + с B — и B — с B +), затем дадим последовательность A +, B -, A -, B + импульсы, он вращает двигатель в противоположном направлении. Так управление направлением реализовано в некоторых контроллерах шаговых двигателей. Самый простой способ изменить последовательность импульсов — использовать, например, реле.
Форма волны (однофазная) импульсная последовательность драйвера
Упрощенная схема однофазного (волнового) регулятора с изменением направления вращения
Несомненное преимущество униполярных шаговых двигателей — простота управления. Но это связано с волновым управлением, с использованием только половины обмотки за раз, одна из них всегда не используется. Используется только 1/4 всех обмоток шагового двигателя, что значительно снижает максимальную производительность.
АВТОНОМНЫЙ КОНТРОЛЛЕР БИПОЛЯРНОГО ШАГОВОГО ДВИГАТЕЛЯ.
Для проверки и автономного использования шаговых двигателей был разработан автономный контроллер униполярных шаговых двигателей, однако он может работать далеко не со всеми двигателями, а только с теми, что имеют средние выводы обмоток, 5 ,6 и 8 выводные двигатели.
Для запуска 4 выводные двигателей по схеме биполярного включения был разработан новый контроллер . Он позволяет запускать 4, 6 и 8 выводные двигатели с большим КПД.
Фотография собранного контролера. Транзисторы отогнуты в разные стороны для крепления двух раздельных пластинчатых радиаторов.
Фотография со стороны проводников
Схема собрана на микроконтроллере PIC12F629 и дискретных элементах в драйвере ШД. Монтаж выполнен частично с использованием smd элементов. Выходные транзисторы Дарлингтона уже содержат диоды для защиты от индуктивной составляющей обмоток ШД.
При использованных деталях допускается напряжение питания ШД до 40 вольт и током обмотки до 5 ампер (паспортно). Есть прошивки для работы в полушаговом, шаговом однофазном и шаговом двухфазном режимах.
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Управление биполярным шаговым двигателем без использования драйвера
Как-то раз мне захотелось поэксперементировать с шаговыми двигателями. С униполярным двигателем всё очень просто, достаточно полумоста на очень бюджетной микросхеме ULN2003 или ULN2803. А вот с биполярным двигателем всё гораздо сложнее. Он имеет минимум две обмотки, на каждом конце которых полярность питания должна меняться на противоположную. Кто-то скажет «зачем изобретать велосипед? Купи драйвер на L239 и радуйся жизни», может быть это и правильно, но мы же не ищем лёгких путей, да и что-нибудь спаять руки чешутся (а драйверы были куплены, просто они ещё ехали из Китая). Немного покопавшись в интернете, я заинтересовался такой штукой, как H-мост.
Данная схема может подавать на каждый конец обмотки и плюс и минус, в зависимости от того на затвор верхнего или нижнего транзистора плеча моста подать управляющее напряжение.
Так как у биполярного двигателя две обмотки, то нам понадобится два H-моста. Тогда для управления двумя мостами у нас получается восемь управляющих проводов (на затворы каждого транзистора). Это очень неудобно, потому что, во первых, нужно много проводов цеплять к управляющему микроконтроллеру, а во вторых, если подать управляющий сигнал одновременно на верхний и на нижний транзисторы одного плеча моста, то мы получим короткое замыкание и просто сожжём два транзистора. Поэтому я решил сделать одну хитрость: затворы нижних транзисторов каждого плеча (они у нас коммутируют минус к обмотке мотора) необходимо подключить через инвертор (в данном случае логический элемент «не»), а затворы верхних транзисторов — на вход того же инвертора. Таким образом мы получаем уже четыре управляющих сигнала (A, B, C ,D).
В итоге, если мы подаём на любую линию управления логическую единицу (ТТЛ), то у нас откроется верхний транзистор плеча, а на затвор нижнего пойдёт логический нуль и он будет закрыт. А если подать на ту же линию логический нуль , то верхний транзистор будет закрыт, а на затвор нижнего будет подана логическая единица (с выхода инвертора), и конец обмотки будет подключён к минусу. С теорией покончено.
Теперь подключаем нашу схему к arduino (или просто микроконтроллеру): линии A,B,C,D — к любому свободному пину, так же же подключаем минус и плюс 5 вольт от платы контроллера. Сами мосты запитываем от отдельного блока питания (у меня был не стабилизированный на 15 вольт).
Осталось написать программу управления
Будем управлять двигателем в полушаговом режиме (8 шажков). В моей программе написаны три функции: forward — будет крутить двигатель в одну сторону, backward — в обратную, stope — остановка. Функции запускаются с помощью терминала путём отправки символов (f,b и s соответственно). Переменная dl служит для управления скоростью вращения двигателя. Так как программа выполняется по кругу, то двигатель вращается постоянно. По аналогии можно добавить подпрограммы для одного шага или нужного количества шагов.
Внешний вид готового устройства:
Как видно из фотографии, мосты собраны из разных транзисторов (в верхних плечах пары ceb703al и 76129s выпаянные из старых материнок, в нижних плечах irf640 и irf610), так как восемь одинаковых у меня просто не было. Тем не менее схема вполне работоспособна. Так же на фото заметна пара «соплей» — перемычек — как всегда ошибки при рисовании платы.
И в конце статьи — демонстрационное видео работы устройства.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером
Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр)
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
“>
Принцип работы биполярного шагового электродвигателя
На следующем рисунке показана схема работы биполярного шагового электродвигателя. О другом типе шаговых электродвигателей — униполярных – можно прочитать в соответствующих источниках. В биполярном шаговом двигателе, как правило, имеются четыре катушки. Катушки, расположенные одна против другой, соединены так, что работают синхронно.Все катушки расположены на неподвижном статоре двигателя, а значит, нет необходимости во вращающемся коллекторе и щетках, как у двигателей постоянного тока.
Ротор шагового электродвигателя выполнен в форме намагниченных зубцов с чередующимися северным (С) и южным (Ю) полюсами (зубцов на роторе обычно гораздо больше, чем показано на представленном рисунке). Каждую катушку можно подключить так, что она будет намагничена или как северный полюс, или как южный, — в зависимости от направления тока в катушке. Катушки 1 и 3 работают совместно так, что когда катушка 1 будет южным полюсом, катушка 3 также будет южным полюсом. То же самое относится и к катушкам 2 и 4.
Начнем с варианта рисунка под буквой «а» — когда катушка 1 , а значит, и катушка 3 запитаны так, что становятся южными полюсами (Ю), вследствие того, что разноименные полюса притягиваются, а одноименные отталкиваются, ротор поворачивается против часовой стрелки до тех пор, пока ближайшие зубцы ротора с намагниченностью северного полюса (С) не поравняются с катушками 1 и 3 (как показано на «б»).Чтобы продолжить вращение против часовой стрелки, на следующем шаге (рисунок «в») необходимо подать ток в катушки 2 и 4 так, чтобы они стали северными полюсами (С). Тогда ближайшие зубцы ротора с намагниченностью Ю подтянутся к катушкам 2 и 4 (рисунок «г»).
Каждое такое действие проворачивает ротор электродвигателя на один шаг. Для продолжения вращения против часовой стрелки в катушке 1 снова нужно создать намагниченность С (см. представленную таблицу).
Таблица 1. Последовательность действий при вращении шагового двигателя против часовой стрелки
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | — |
| — | С |
| С | — |
| — | Ю |
Прочерки в графах таблицы 1 указывают на то, что катушка в этот момент не оказывает влияния на вращение ротора и должна быть обесточена. Чтобы усилить момент вращения двигателя, на эти обесточенные катушки можно подать такой ток, чтобы полярность их намагниченности совпадала с полярностью стоящего под ней зубца ротора (таблица 2).
Таблица 2. Уточненная последовательность переключения катушек при вращении шагового двигателя
| Катушки 1 и 3 | Катушки 2 и 4 |
| Ю | С |
| С | С |
| С | Ю |
| Ю | Ю |
Для изменения направления вращения ротора нужно всего лишь изменить порядок переключения катушек, указанный в таблице 2, на обратный.
Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом — то есть максимально мощный и экономичный двигатель.Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STh48-1684
Управление шаговым двигателем с помощью микроконтроллера.
После первого запуска стало понятно, что хотели получить одно, а получили другое, после того как транзистор закрывался, двигатель продолжал вращаться ещё не один оборот, оно и понятно, для того чтобы вал остановился, энергия, которую он накопил пока вращался, должна быть израсходована.
Вот мы и подошли к одному из основных преимуществ шагового двигателя — возможность точного позиционирования.
Шаговые двигатели бывают трёх основных типов:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
В двигателях с переменным магнитным сопротивлением, ротор изготовлен из магнитомягкого материала, то есть материала, который способен быстро намагничиваться и быстро терять магнитные свойства при снятии магнитного поля. Вращающий момент создаётся магнитными потоками статора, причём ротор всегда становится так, чтобы магнитный поток создаваемый статором замкнулся. Для того чтобы ротор повернулся надо, выключить ток в одной обмотке и включить в другой обмотке.
Гибридные двигатели обладают преимуществами вышеописанных двигателей и лучшими характеристиками: меньшей величиной шага, большим моментом, большей скоростью и как следствие стоят дороже.
Перейдём к практике, для эксперимента возьмём шаговый двигатель MITSUMI M42SP-5 с шагом 7. 5°, изображённый на картинке.
Из таблицы понятно, что такие двигатели бывают двух типов:
- 12 вольтовые с сопротивлением обмотки 50 Ом
- 24 вольтовые с сопротивлением обмотки 120 Ом
Схема двигателя изображена на картинке ниже.
Из двигателя выходит 5 проводов: 4 фазы и один общий. Общий провод можно найти с помощью мультиметра, сопротивление между ним и оставшимися 4 проводами равно сопротивлению фазы, в нашем случае 50 Ом.
Как писалось выше, необходим посредник, который примет от микроконтроллера 20mA и отдаст двигателю 259mA. Можно как раньше взять полевой транзистор, но есть одно, но фаз здесь целых четыре штуки и для этого случая есть более простое решение — это использовать микросхему ULN2003.
Транзистор Дарлингтона или пара Дарлингтона, представляет собой два соединённых транзистора, его отличительной особенностью является высокий коэффициент усиления, который равен произведению коэффициентов усиления каждого из транзисторов(βс = β1 ∙ β2).
Вращать двигатель можно, подавая питание по очереди на обмотки, при этом в любой момент времени включена лишь одна обмотка, в этом случае двигатель будет работать в режиме шага, то есть при одном переключении обмоток будет поворачиваться на 7.5°.
Для удобства управления можно создать массив в котором номер элемента массива будет обозначать номер шага, а значение элемента массива — какие обмотки должны быть включены.
Если передавать последовательно элементы этого массива в порт микроконтроллера, двигатель будет работать в режиме полушага, если через один — в режиме полного шага. Для передачи значений в порт удобно использовать прерывание от таймера по переполнению, таким образом, изменяя время между прерываниями, мы можем регулировать скорость вращения двигателя.
Драйвер шагового двигателя pic16f84a
Короче мы выставили 0,2В.
Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:
Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:
Либо на 16 ноге, он такой:
Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ
Это важно. Даже если шим не запустится, логическая часть 297 будет работать, т.е
при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы
Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом
Так что важно убедиться в запуске генератора микросхемы
Данное описание не претендует на бестселлер, оно может дополняться и критиковаться но только по существу…
Проверяем L297 с помощью ТМ2
Скачать (cкачиваний: 1274) схему и печатку от delta24
Обсуждение в закрытой части форума (только для постоянных пользователей, для получения доступа обращайтесь к delta24 )
Pololu — Драйверы шаговых двигателей
Драйверы шаговых двигателей специально разработаны для управления шаговыми двигателями, которые способны непрерывно вращаться с точным контролем положения даже без системы обратной связи. Наши драйверы шаговых двигателей предлагают регулируемое управление током и многошаговое разрешение, а также они оснащены встроенными преобразователями, которые позволяют управлять шаговым двигателем с помощью простых входных данных шага и направления. Эти модули, как правило, представляют собой базовые платы-носители для различных ИС драйверов шаговых двигателей, которые предлагают низкоуровневые интерфейсы, такие как входы для непосредственного запуска каждого шага. Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер.
Большинство наших драйверов шаговых двигателей доступны в компактном (0,6″×0,8″) форм-факторе, совместимом по выводам. В следующей таблице сравнивается наш выбор:
| A4988 (оригинал) | A4988, Черный Ed. | ДРВ8825 | ДРВ8834 | ДРВ8880 | MP6500, Пот. СС | MP6500, Цифровой CC | ТБ67С279ФТГ | ТБ67С249ФТГ | STSPIN820 | STSPIN220 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Чип драйвера: | А4988 | ДРВ8825 | ДРВ8834 | ДРВ8880 | МП6500 | ТБ67С279ФТГ | ТБ67С249ФТГ | STSPIN820 | STSPIN220 | ||
| Минимальное рабочее напряжение: | 8 В | 8,2 В | 2,5 В | 6,5 В | 4,5 В | 10 В | 10 В | 7 В | 1,8 В | ||
| Максимальное рабочее напряжение: | 35 В | 45 В | 10,8 В | 45 В | 35 В | 47 В | 47 В | 45 В | 10 В | ||
| Максимальный длительный ток на фазу: (1) | 1 А | 1,2 А | 1,5 А | 1,5 А | 1 А | 1,5 А | 1,1 А | 1,6 А | 0,9 А | 1,1 А | |
| Пиковый ток на фазу: (2) | 2 А | 2,2 А | 2 А | 1,6 А | 2,5 А | 2 А | 2 А | 4,5 А | 1,5 А | 1,3 А | |
| Микрошаг вниз до: | 1/16 | 1/32 | 1/32 | 1/16 | 1/8 | 1/32 | 1/32 | 1/256 | 1/256 | ||
| Количество слоев платы: | 2 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Особенности: | высокое максимальное напряжение, высокий ток | низковольтный рабочий, сильноточный | AutoTune, цифровой ток уменьшение, высокое макс. напряжение | сильноточный | цифровой ток управление, большой ток | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, большой ток | 128 и 256 микрошагов, высокое макс. напряжение | 64, 128 и 256 микрошагов, низковольтный операция | ||
| Цена за 1 шт.: | 14,45 $ | 14,45 $ | 18,95 $ | 9,95 $ | 8,95 $ | 12,95 $ | 12,95 $ | 10,75 $ | 21,95 $ | 12,95 $ | 6,95 $ |
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток для компонентов на плате (требуется дополнительное охлаждение). | |||||||||||
В эту категорию также входят несколько более крупных модулей драйверов, которые обычно могут выдавать больший ток и предлагают больше функций, чем более компактные драйверы, указанные выше:
| TB67S279FTG Полный выход | TB67S249FTG Полный выход | АМИС-30543 | ТБ67С128ФТГ | Мощный шаговый двигатель Драйвер двигателя 36v4 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Чип драйвера: | ТБ67С279ФТГ | ТБ67С249ФТГ | АМИС-30543 | ТБ67С128ФТГ | ДРВ8711 | ||||||
| Минимальное рабочее напряжение: | 10 В | 10 В | 6 В | 6,5 В | 8 В | ||||||
| Максимальное рабочее напряжение: | 47 В | 47 В | 30 В | 44 В | 50 В | ||||||
| Максимальный длительный ток на фазу: (1) | 1,2 А | 1,7 А | 1,8 А | 2. 1 А | 4 А | ||||||
| Пиковый ток на фазу: (2) | 2 А | 4,5 А | 3 А | 5 А | 6 А | ||||||
| Микрошаговое понижение до: | 1/32 | 1/32 | 1/128 | 1/128 | 1/256 | ||||||
| Количество слоев платы: | 2 | 2 | 2 | 2 | 2 | ||||||
| Размеры: | 1,0″ × 1,4″ | 1,0″ × 1,4″ | 1,0″ × 1,2″ | 1,2″ × 1,6″ | 1,3″ × 1,2″ | ||||||
| Особенности: | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, большой ток | Интерфейс SPI, ШИМ с низким уровнем электромагнитных помех, сильноточный ток, микрошаг 1/128, обратная ЭДС обратная связь | Автоматическая регулировка усиления, ADMD, высокое максимальное напряжение, большой ток, микрошаг 1/128, дополнительный последовательный интерфейс | сверхвысокий ток, высокое максимальное напряжение, интерфейс SPI, микрошаг 1/256, обратная ЭДС обратная связь, обнаружение останова | ||||||
| Цена за 1 шт. : | 12,75 $ | 24,95 $ | $19,95 | 16,95 $ | 39,95 $ | ||||||
| 1 На несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. 2 Максимальный теоретический ток для компонентов на плате (требуется дополнительное охлаждение). | |||||||||||
Для более высокого уровня управления шаговым двигателем рассмотрите наши контроллеры шаговых двигателей Tic, которые имеют некоторые из тех же ИС драйверов шаговых двигателей, что и наши несущие платы, в сочетании со встроенным микроконтроллером, который интеллектуально генерирует управляющий сигнал низкого уровня. в ответ на различные интерфейсы, такие как USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования с микроконтроллером, импульсы сервопривода RC для использования в системе RC, аналоговые напряжения для использования с потенциометром или аналоговым джойстиком, и квадратурный энкодер для использования с поворотным энкодером. Tics также предлагает широкий спектр настроек, которые можно настроить через USB с помощью бесплатной утилиты.
Сравните все товары в этой категории
Подкатегории
Товары в категории «Драйверы шаговых двигателей»
Драйвер шагового двигателя на дискретном МОП-транзисторе позволяет управлять одним биполярным шаговым двигателем. Он поддерживает широкий диапазон рабочего напряжения от 8 В до 50 В и может обеспечивать непрерывный ток до 4 А на фазу без радиатора или принудительного воздушного потока (макс. 6 А при достаточном дополнительном охлаждении). Интерфейс SPI позволяет настроить ограничение тока, ступенчатый режим (9пошаговые режимы от полного шага до 1/256), режим затухания и обнаружение остановки. Драйвер также обеспечивает обратную связь по обратной ЭДС, которую можно использовать для более продвинутых алгоритмов управления и обнаружения опрокидывания. Дополнительные функции включают защиту от обратного напряжения, пониженного напряжения и перегрузки по току.
Эта коммутационная плата упрощает использование микрошагового драйвера биполярного шагового двигателя Toshiba TB67S128FTG с регулируемым ограничением тока и микрошагом до 1/128 шага. Кроме того, он имеет возможность динамически выбирать оптимальный режим затухания, контролируя фактический ток двигателя, и может автоматически снижать управляющий ток ниже полного значения, когда двигатель мало нагружен, чтобы минимизировать потребление энергии и тепловыделение. Драйвер имеет широкий диапазон рабочего напряжения от 6,5 В до 44 В и может обеспечить примерно 2,1 А на фазу непрерывно без радиатора или принудительного воздушного потока (до 5 А пикового значения). Он имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Это коммутационная плата для микрошагового драйвера биполярного шагового двигателя AMIS-30543 компании ON Semiconductor, который имеет ограничение тока с регулировкой SPI, 11-ступенчатые режимы (от полного шага до 1/128 шага), обратную ЭДС обратной связи, которую можно используется для обнаружения опрокидывания или дополнительного управления с обратной связью, а также для защиты от перегрузки по току и перегрева. Плата работает от 6 В до 30 В и может выдавать примерно до 1,8 А на фазу без радиатора или принудительного воздушного потока (она рассчитана на 3 А на катушку при достаточном дополнительном охлаждении).
Это переходная плата для микрошагового драйвера биполярного шагового двигателя TI DRV8834. Его распиновка и интерфейс практически идентичны таковым у наших носителей A4988, поэтому его можно использовать в качестве замены этих плат во многих приложениях. DRV8834 работает в диапазоне от 2,5 до 10,8 В, что позволяет питать шаговые двигатели напряжением, слишком низким для других драйверов, и может непрерывно обеспечивать до 1,5 А на фазу без радиатора или принудительного воздушного потока (до 2 А в пиковом режиме). ). Он имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошагов разрешения (до 1/32 шага). Эта плата поставляется с 0,1-дюймовыми штыревыми штырьками, включенными в комплект, но не припаянными.
Эта версия нашего низковольтного шасси драйвера шагового двигателя DRV8834 поставляется с номером с установленными вилочными контактами , поэтому для его использования с соответствующим 16-контактным разъемом или макетной платой без пайки пайка не требуется. Дополнительную информацию о драйвере см. на странице продукта DRV8834 Low-Voltage Stepper Motor Driver Carrier.
Эта коммутационная плата для микрошагового драйвера биполярного шагового двигателя TI DRV8880 имеет регулируемое ограничение тока, защиту от перегрузки по току и перегреву, а также шесть микрошагов (до 1/16 шага). Кроме того, ограничение тока драйвера может быть динамически уменьшено для экономии энергии, и он имеет функцию автонастройки, которая автоматически выбирает режим затухания, обеспечивающий наиболее плавную форму волны тока. Носитель имеет распиновку и интерфейс, практически идентичные нашему A49.88, поэтому его можно использовать в качестве замены для этих плат во многих приложениях. DRV8880 работает при напряжении от 6,5 В до 45 В и может непрерывно подавать приблизительно до 1 А на фазу без радиатора или принудительного воздушного потока (до 1,6 А в пиковом режиме). Эта плата поставляется с 0,1-дюймовыми штырьковыми штырями в комплекте, но не припаяна.
Эта версия нашего держателя драйвера шагового двигателя DRV8880 поставляется с установленными штыревыми штырьками , поэтому для использования с соответствующим 16-контактным разъемом пайка не требуется. или макетная плата без пайки. Дополнительную информацию о драйвере см. на странице продукта DRV8880 «Носитель драйвера шагового двигателя низкого напряжения».
Pololu Высокопроизводительный двигатель шагового двигателя 36V4
Обзор
Pololu High Power Dister Dister 36V4, нижний вид с Dimensions. |
|---|
Мощный драйвер шагового двигателя Pololu 36v4, вид сверху. |
|---|
Высокомощный драйвер шагового двигателя Pololu 36v4 сочетает в себе микросхему драйвера шагового двигателя DRV8711 от Texas Instruments с внешними МОП-транзисторами для управления большими биполярными шаговыми двигателями при рабочем напряжении от 8 В до 50 В. Драйвер DRV8711 имеет множество конфигурируемых настройки, поэтому см. техническое описание DRV8711 для подробного объяснения его функций и способов их использования (у нас также есть библиотека Arduino, которая упрощает начало работы, предоставляя основные функции для настройки и работы с драйвером).
Мощность драйвера зависит от внешних двойных Н-мостов, которые позволяют драйверу подавать непрерывный ток до 4 А на фазу без какого-либо дополнительного охлаждения, такого как радиаторы или принудительный поток воздуха. (При достаточном дополнительном охлаждении драйвер может поддерживать ток примерно до 6 А на фазу; дополнительную информацию, включая важную информацию о безопасном использовании этого продукта, см. в разделе «Рассеиваемая мощность » ниже.)
Основные характеристики
- Широкий диапазон рабочего напряжения от 8 В до 50 В
- Высокая мощность: может обеспечивать непрерывный ток до 4 А на фазу без дополнительного охлаждения (макс. 6 А при достаточном дополнительном охлаждении)
- Широкие возможности настройки через интерфейс SPI
- Дополнительные контакты управления STEP/DIR (степпингом также можно управлять только через интерфейс SPI)
- Девять различных шагов разрешения вплоть до 256 микрошагов: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага, 1/32 шага, 1/64 шага, 1/ 128 шагов и 1/256 шагов
- Регулируемое управление током позволяет установить максимальный выходной ток, что позволяет использовать напряжения выше номинального напряжения вашего шагового двигателя для достижения более высокой частоты шагов
- Адаптивное время гашения, регулируемое время затухания и различные режимы затухания тока позволяют создавать сверхплавные профили движения через интерфейс SPI
- Дополнительный выход STALL обеспечивает обнаружение остановки при микрошаге
- Дополнительный выход BEMF позволяет использовать более продвинутые алгоритмы управления и обнаружения останова на основе обратной ЭДС шагового двигателя
- поддерживает альтернативный режим работы для управления двумя коллекторными двигателями постоянного тока с ШИМ-входами вместо одного биполярного шагового двигателя с входами STEP/DIR
- Входы, совместимые с логикой 1,8 В, 3,3 В и 5 В
- Все цифровые выходы имеют открытый сток с подтяжкой к внешнему напряжению IOREF для использования с системами, отличными от 5 В (IOREF можно подключить к соседнему контакту 5V OUT для использования с системами 5 В)
- Блокировка при пониженном напряжении, защита от перегрузки по току, защита от короткого замыкания и защита от обратного напряжения (до 40 В)
- Arduino и примеры эскизов, которые предоставляют основные функции для настройки и работы с драйвером
Драйвер
Доступны библиотека
.
В качестве альтернативы этому драйверу шагового двигателя, наш многоинтерфейсный USB-контроллер шагового двигателя Tic 36v4 высокой мощности имеет аналогичные характеристики мощности и предлагает высокоуровневые интерфейсы (USB, последовательный TTL, I²C, аналоговое напряжение, квадратурный энкодер и RC). сервоимпульсы для хобби), которые облегчают использование в некоторых приложениях. Программное обеспечение для настройки Tic позволяет изменять многие параметры драйвера через USB, устраняя необходимость прямого использования SPI для настройки DRV8711.
Обновление от 19 сентября 2019 г.: Сейчас мы поставляем небольшую версию (md38b) с улучшенной устойчивостью к шумам и отказам при высоких входных напряжениях и высоких ограничениях по току.
Прилагаемое оборудование
Этот продукт поставляется со всеми установленными компонентами для поверхностного монтажа, как показано на рисунке. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка. В комплект входят следующие детали со сквозными отверстиями:
- Два 1×12-контактных отрывных разъема 0,1″ вилки
- Три 2-контактных клеммных блока 3,5 мм (для питания платы и выходов двигателя)
- Одна перемычка 0,1″ (для дополнительного подключения IOREF к соседнему контакту V5 при использовании этого драйвера в 5-вольтовых системах)
0,1-дюймовые патрубки можно разбить или разрезать на более мелкие части по желанию и впаять в меньшие сквозные отверстия. Эти разъемы совместимы с макетными платами без пайки, 0,1-дюймовыми розетками и нашими премиальными и предварительно обжатыми перемычками. Клеммные колодки могут быть впаяны в большие отверстия для удобного временного подключения неизолированных силовых проводов и проводов двигателя (см. наше короткое видео об установке клеммной колодки). Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате для наиболее компактной установки.
Использование драйвера
Распиновка
| PIN | Описание |
|---|---|
| ВИН | Подключение питания платы от 8 В до 50 В (защита от переполюсовки до 40 В). |
| ВМ | Этот контакт обеспечивает доступ к источнику питания двигателя после защиты от обратного напряжения MOSFET (см. схему платы внизу этой страницы). Его можно использовать для подачи защищенного от обратного тока питания на другие компоненты системы. Этот контакт также можно использовать с соседним контактом GND для добавления внешнего электролитического конденсатора в системах, где была бы полезна дополнительная шунтирующая емкость. |
| Земля | Точки заземления для источника питания двигателя и опорного заземления. Источник управления и драйвер двигателя должны иметь общую землю. |
| ВЫХОД1 | Выход двигателя: «положительный» конец катушки фазы А. |
| ВЫХОД2 | Выход двигателя: «отрицательный» конец катушки фазы А. |
| БУТ1 | Выход двигателя: «положительный» конец обмотки фазы B. |
| БУТ2 | Выход двигателя: «отрицательный» конец обмотки фазы B. |
| V5 (ВЫХОД) | Регулируемый выход 5 В: этот контакт обеспечивает доступ к напряжению от внутреннего регулятора DRV8711. Регулятор может обеспечить только до 10 мА, поэтому он в первую очередь полезен только для жесткого подключения входов платы к высокому уровню и питания подтягивающих устройств для выходов платы с открытым стоком. Он вообще не предназначен для питания внешних устройств. Примечание: этот выход 5 В отключен, когда устройство находится в спящем режиме. |
| ИОРЕФ | Все сигнальные выходы платы (кроме BEMF) являются выходами с открытым стоком, которые подтягиваются к IOREF, поэтому на этот вывод следует подавать логическое напряжение системы управления (например, 3,3 В для использования в 3,3 В системах). Для удобства его можно подключить к соседнему контакту V5 (OUT), когда он используется в системе 5 В. |
| ШАГ/АИН1 | Изменения на этом входе перемещают ток двигателя на один шаг вверх или вниз в таблице преобразования (даже если двигатель отключен). Степпингом также можно управлять через интерфейс SPI, поэтому этот вывод является необязательным. В режиме внешнего ШИМ этот вывод работает как AIN1, а не как STEP, и напрямую управляет состоянием выхода AOUT1. |
| ДИР/АИН2 | Вход, определяющий направление вращения шагового двигателя. Направление также можно контролировать через интерфейс SPI, поэтому этот вывод не является обязательным. В режиме внешнего ШИМ этот контакт работает как AIN2, а не как DIR, и напрямую управляет состоянием выхода AOUT2. |
| СДАТО | Вывод данных SPI. (Этот вывод также часто называют «MISO».) Этот вывод является выходом с открытым стоком и подтягивается к IOREF на плате. |
| СДАТИ | Ввод данных SPI. (Этот контакт также часто называют «MOSI».) |
| СКЛК | SPI тактовый вход. |
| СКС | SPI. Логические переходы на этом выводе необходимы для связи SPI, даже если это единственное устройство на шине SPI. |
| СОН | По умолчанию драйвер устанавливает на этом контакте низкий уровень, что переводит его в спящий режим с низким энергопотреблением, когда схема драйвера двигателя и внутренний регулятор 5 В отключены, а все аналоговые схемы переводятся в состояние низкого энергопотребления. Цифровая схема по-прежнему работает в спящем режиме, поэтому к регистрам устройства можно получить доступ через последовательный интерфейс, пока IOREF подается извне. На этот контакт должен быть подан высокий уровень, чтобы включить устройство. |
| СБРОС | Вход сброса микросхемы. Высокий логический уровень на этом входе сбрасывает всю внутреннюю логику, включая индексатор и регистры устройства, и отключает выходы драйвера. Примечание: вывод RESET не работает, пока устройство находится в спящем режиме. |
| НЕИСПРАВНОСТЬ | Выход с открытым стоком, который переходит в низкий уровень при возникновении ошибки перегрузки по току, предварительного драйвера, перегрева или пониженного напряжения. Этот вывод подтягивается к IOREF, что по умолчанию делает его высоким. |
| БИН1 | В режиме внешнего ШИМ BIN1 напрямую управляет состоянием выхода BOUT1. Этот вывод не используется в режиме индексатора (т.е. при использовании этого устройства в качестве драйвера шагового двигателя). |
| БИН2 | В режиме внешнего ШИМ BIN2 напрямую управляет состоянием выхода BOUT2. Этот вывод не используется в режиме индексатора (т.е. при использовании этого устройства в качестве драйвера шагового двигателя). |
| СТОЛ/БЭМФВ | Выход с открытым стоком, подтянутый к IOREF на плате. В режиме внутреннего обнаружения опрокидывания выход становится низким при обнаружении опрокидывания. В режиме обнаружения внешнего опрокидывания выход становится низким, когда доступно достоверное измерение противо-ЭДС. |
| БЭМФ | Аналоговый выход, представляющий противо-ЭДС двигателя. Сигнал на этом выводе может быть дополнительно обработан микроконтроллером для реализации более продвинутых алгоритмов управления и обнаружения останова. |
Для получения дополнительной информации об этих контактах см. техническое описание DRV8711.
При высоких входных напряжениях (особенно выше 30 В) и высоких ограничениях по току интерфейс SPI драйвера с большей вероятностью будет подвержен влиянию электрических помех от драйвера и шагового двигателя, что может привести к ошибкам связи. Вы можете уменьшить эти помехи с помощью тщательной проводки и экранирования, а также снизить риск неожиданного поведения, приняв соответствующие меры предосторожности при обмене данными по SPI (например, прочитайте и проверьте настройки конфигурации после их записи и избегайте настройки драйвера, когда выходы двигателя отключены). включено).
В качестве альтернативы рассмотрите возможность использования нашего многоинтерфейсного USB-контроллера мощного шагового двигателя Tic 36v4, который обеспечивает интерфейсы высокого уровня для настройки и управления (что делает ненужной прямую связь SPI).
Общая типовая схема подключения
Типовая схема подключения микроконтроллера к драйверу шагового двигателя Pololu High-Power 36v4. |
|---|
Несмотря на то, что High-Power Stepper Motor Driver 36v4 позволяет управлять шаговым двигателем через простой интерфейс шага и направления, его необходимо сначала включить и настроить через интерфейс SPI после каждого включения питания. Это означает, что управляющий микроконтроллер должен быть способен действовать как мастер SPI (либо с периферийным SPI, либо с программным SPI), и он должен быть подключен к контактам SDATI, SCLK и SCS. Хотя выводы SDATO и FAULT не требуются для использования этого драйвера, обычно рекомендуется использовать их для отслеживания ошибок.
Типовая схема подключения (только для систем 5 В)
Типовая схема подключения микроконтроллера с логическим напряжением 5 В к драйверу шагового двигателя Pololu High-Power 36v4. |
|---|
Высокомощный драйвер шагового двигателя 36v4 имеет внутренний стабилизатор 5 В, который можно использовать для питания IOREF в тех случаях, когда плата используется в системах 5 В. Мы предоставляем закорачивающий блок для подключения V5 к IOREF, или для более компактного соединения вы можете соединить перемычкой для поверхностного монтажа, расположенной рядом с этими контактами (выделено на рисунке ниже).
Обратите внимание, что подача IOREF от V5 не позволяет получить доступ к регистрам устройства через SPI, когда устройство находится в спящем режиме, поскольку выход регулятора V5 отключен, когда SLEEP находится на низком уровне.
Перемычка для поверхностного монтажа для контактов V5 и IOREF драйвера шагового двигателя высокой мощности Pololu 36v4. |
|---|
Библиотека Arduino и код примера
Мы написали библиотеку драйверов мощных шаговых двигателей для Arduino, которая предоставляет базовые функции для настройки и работы драйвера с помощью контроллера, совместимого с Arduino или Arduino. Библиотека включает в себя несколько примеров эскизов.
Вопросы рассеяния мощности
Высокомощный драйвер шагового двигателя 36v4 может обеспечить непрерывный ток до 4 А на фазу в типичных условиях, но фактический ток, который он может обеспечить, будет зависеть от того, насколько хорошо вы сможете охлаждать модуль. Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или принудительный поток воздуха. (Наоборот, производительность будет снижена в приложениях, которые ограничивают рассеивание тепла, таких как высокие температуры окружающей среды или работа в корпусах.) При достаточном дополнительном охлаждении драйвер может подавать до 6 А на фазу, прежде чем превысит номинальную мощность 1 Вт 30 Токоизмерительные резисторы мОм.
Ограничение тока драйвера устанавливается через интерфейс SPI. Вы можете подтвердить правильность настройки, используя мультиметр для измерения фактического тока через одну из катушек, когда шаговый двигатель находится в полношаговом режиме, а не в шаговом. Ток, который вы измеряете таким образом, будет составлять примерно 70% от установленного предела. Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Предупреждение: Этот драйвер двигателя не имеет функции отключения при перегреве (хотя микросхема DRV8711 имеет защиту от перегрева, первыми перегреваются внешние МОП-транзисторы). Перегрев может привести к необратимому повреждению привода двигателя. Мы настоятельно рекомендуем вам не увеличивать настройку ограничения тока выше 4 А (или ниже в приложениях с пониженным тепловыделением), если только вы не убедитесь, что температура полевых МОП-транзисторов останется ниже 140 °C.
Примечание. При включении драйвера значение ограничения тока по умолчанию устанавливается на максимальное значение (~18 А). Убедитесь, что вы установили что-то подходящее как для вашего шагового двигателя, так и для драйвера, прежде чем активировать выходы!
Этот продукт может нагреть до такой степени, что вы можете обжечься задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Принципиальная схема
Принципиальная схема драйвера шагового двигателя высокой мощности Pololu 36v4. |
|---|
Эта диаграмма также доступна в формате для загрузки в формате pdf (117k pdf).
DRV8825 Держатель драйвера шагового двигателя, сильноточный
DRV8824/DRV8825 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт является несущей платой или переходной платой для драйвера шагового двигателя TI DRV8825; поэтому мы рекомендуем внимательно прочитать техническое описание DRV8825 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2,2 А на катушку (см.0584 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации). Вот некоторые из основных особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных шагов разрешения: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Максимальное напряжение питания 45 В
- Встроенный регулятор (не требуется внешний источник питания логики)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Отключение при перегреве, отключение по перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на землю и нагрузки
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
- Размер модуля, схема расположения выводов и интерфейс в большинстве случаев соответствуют нашим корпусам драйверов шаговых двигателей A4988 (дополнительную информацию см. внизу этой страницы)
Обратите внимание, что у нас есть несколько других драйверов шаговых двигателей, которые можно использовать в качестве альтернативы этому модулю (и в качестве замены во многих приложениях): подходит для низковольтных приложений.
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8825, установленными, как показано на изображении продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, которые входят в комплект, но не припаяны; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Драйвер шагового двигателя DRV8825 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Предупреждение: Установка штифтов жатки так, чтобы сторона для трафаретной печати была вверху, а компоненты внизу, может ограничить диапазон движения подстроечного потенциометра, используемого для установки ограничения тока. Если вы планируете установить контакты разъема в этой ориентации, установите ограничение по току перед пайкой контактов.
Использование драйвера
Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя DRV8824/DRV8825 (полношаговый режим). |
|---|
Силовые соединения
Драйверу необходимо, чтобы напряжение питания двигателя составляло 8,2–45 В, которое должно быть подключено к VMOT и GND. Этот источник питания должен иметь соответствующие развязывающие конденсаторы рядом с платой и должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушающим пикам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 45 В для DRV8825 и привести к необратимому повреждению платы, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться DRV8825, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как DRV8825, обеспечивает более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MODE0, MODE1 и MODE2) позволяют выбрать одно из шести ступенчатых разрешений в соответствии с таблицей ниже. Все три входа селектора имеют внутренние подтягивающие резисторы на 100 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| РЕЖИМ0 | РЕЖИМ1 | РЕЖИМ2 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | 1/4 ступень |
| Высокий | Высокий | Низкий | 1/8 шаг |
| Низкий | Низкий | Высокий | Шаг 1/16 |
| Высокий | Низкий | Высокий | Шаг 1/32 |
| Низкий | Высокий | Высокий | Шаг 1/32 |
| Высокий | Высокий | Высокий | Шаг 1/32 |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Эти входы по умолчанию имеют низкий уровень через внутренние резисторы 100 кОм. Если вы просто хотите вращение в одном направлении, вы можете оставить DIR отключенным.
Микросхема имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENBL. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что драйвер подает низкий уровень на вывод SLEEP через внутренний понижающий резистор на 1 МОм, а на выводы RESET и ENBL — через внутренние понижающие резисторы на 100 кОм. Эти состояния RESET и SLEEP по умолчанию не позволяют драйверу работать; оба этих контакта должны иметь высокий уровень, чтобы активировать драйвер (они могут быть подключены непосредственно к логическому «высокому» напряжению между 2,2 и 5,25 В, или ими можно динамически управлять через подключения к цифровым выходам MCU). По умолчанию вывод ENBL включен, поэтому этот вывод можно оставить отключенным.
Схема контактов nSLEEP и nFAULT на шасси DRV8824/DRV8825/DRV8834. |
|---|
DRV8825 также имеет выход FAULT, который подает низкий уровень всякий раз, когда полевые транзисторы H-моста отключаются в результате защиты от перегрузки по току или теплового отключения. Несущая плата соединяет этот контакт с контактом SLEEP через резистор 10 кОм, который действует как подтягивающий сигнал FAULT всякий раз, когда SLEEP внешне удерживается высоким, поэтому на выводе FAULT нет необходимости во внешнем подтягивании. Обратите внимание, что носитель включает в себя защитный резистор 1,5 кОм последовательно с выводом FAULT, что делает безопасным подключение этого вывода непосредственно к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, предназначенной для совместимого по выводам A49.88 перевозчик. В такой системе резистор 10 кОм между SLEEP и FAULT будет действовать как подтягивающий для SLEEP, что делает носитель DRV8825 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку на SLEEP). штырь). Чтобы сбои не отключали контакт SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу контакта SLEEP, не должен превышать 4,7 кОм.
Ограничение тока
Для достижения высокой скорости шага питание двигателя обычно намного выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что указывает на максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 12 В позволит увеличить скорость шага, но ток должен активно ограничивать до 1 А, чтобы предотвратить повреждение двигателя.
DRV8825 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя. Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP. Измеренный ток будет в 0,7 раза превышать предельный ток (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предельного тока в полношаговом режиме).
Другой способ установить ограничение по току — измерить напряжение на контакте «ref» и рассчитать результирующее ограничение по току (резисторы измерения тока: 0,100 Ом ). Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком на нижней части печатной платы. Ограничение тока в амперах относится к эталонному напряжению в вольтах следующим образом:
«text(Current Limit) = text(VREF) * 2«
или, преобразованное для решения для VREF:
«text(VREF ) = текст (текущий предел) / 2«
Так, например, если у вас есть шаговый двигатель, рассчитанный на 1 А, вы можете установить ограничение тока на 1 А, установив опорное напряжение на 0,5 В.
Примечание: Ток катушки может сильно отличаться от ток источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Соображения по рассеиваемой мощности
ИС драйвера DRV8825 имеет максимальный номинальный ток 2,5 А на катушку, но резисторы измерения тока дополнительно ограничивают максимальный ток до 2,2 А, и фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать ИС классная. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1,5 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжется задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки зависит от установленного предела тока, но не обязательно.0584 равно настройке ограничения тока. Фактический ток через каждую катушку изменяется с каждым микрошагом. См. техническое описание DRV8825 для получения дополнительной информации.
Схематическая диаграмма
Схематическая диаграмма держателя драйвера шагового двигателя DRV8824/DRV8825. |
|---|
Токоизмерительные резисторы (R2 и R3) на шасси DRV8825 имеют сопротивление 0,100 Ом. Эта схема также доступна для скачивания в формате pdf (196k pdf).
Ключевые различия между DRV8825 и A4988
Платформа DRV8825 была разработана таким образом, чтобы быть максимально похожей на наши опоры драйвера шагового двигателя A4988, и ее можно использовать в качестве замены для держателя A4988 во многих приложениях, поскольку он имеет общие тот же размер, распиновка и общий интерфейс управления. Однако следует отметить несколько различий между двумя модулями:
Драйвер шагового двигателя DRV8825. |
|---|
Держатель драйвера шагового двигателя A4988, Black Edition (показан с оригинальными зелеными резисторами измерения тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется в качестве выхода FAULT DRV8825, поскольку DRV8825 не требует питания логики (а A4988 не имеет выхода неисправности). Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (для его защиты имеется резистор 1,5 кОм между выходом IC и выводом), поэтому модуль DRV8825 можно использовать в системах, предназначенных для A49.88, которые направляют питание логики на этот контакт.
- Контакт SLEEP на DRV8825 по умолчанию не подтянут, как на A4988, но несущая плата подключает его к контакту FAULT через резистор 10k. Следовательно, системы, предназначенные для A4988, которые направляют питание логики на вывод FAULT, фактически будут иметь подтяжку 10 кОм на выводе SLEEP. (Этот резистор 10 кОм отсутствует в начальной (md20a) версии шасси DRV8825.)
- Потенциометр ограничения тока находится в другом месте.
- Связь между настройкой ограничения тока и напряжением опорного контакта отличается.
- DRV8825 предлагает микрошаговый шаг 1/32; A4988 опускается только до 1/16 шага.
- Входы контактов выбора режима, соответствующие шагу 1/16 на A4988, приводят к микрошагу 1/32 на DRV8825. Для всех других разрешений микрошагов таблица выбора шага одинакова как для DRV8825, так и для A4988.
- Требования к синхронизации для минимальной длительности импульса на выводе STEP различаются для двух драйверов. Для DRV8825 высокий и низкий импульсы STEP должны быть не менее 1,9 каждый.нас; они могут быть всего 1 мкс при использовании A4988.
- DRV8825 имеет более высокое максимальное напряжение питания, чем A4988 (45 В против 35 В), что означает, что DRV8825 можно использовать более безопасно при более высоких напряжениях и он менее подвержен повреждениям от скачков напряжения LC.
- DRV8825 может отдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8825 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для оригинального A49).88 перевозчик).
- DRV8825 использует другое соглашение об именах для выходов шагового двигателя, но функционально они такие же, как и соответствующие контакты на плате A4988, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя. На обеих платах первая часть этикетки идентифицирует катушку (таким образом, у вас есть катушки «A» и «B» на DRV8825 и катушки «1» и «2» на A4988).
- Для тех, кто работает с приложениями, чувствительными к цвету, обратите внимание, что носитель DRV8825 имеет фиолетовый цвет.
Таким образом, шасси DRV8825 достаточно похоже на наши шасси A4988, поэтому минимальная схема подключения для A4988 также является допустимым альтернативным способом подключения DRV8825 к микроконтроллеру:
схема подключения микроконтроллера к плате драйвера шагового двигателя DRV8824/DRV8825 (полношаговый режим). |
|---|
Этот товар часто покупают вместе с:
| Шаговый двигатель: биполярный, 200 шагов/об, 42×38 мм, 2,8 В, 1,7 А/фаза |
DRV8834 Держатель низковольтного драйвера шагового двигателя
DRV8834 Держатель низковольтного драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для драйвера низковольтного шагового двигателя TI DRV8834; поэтому мы рекомендуем внимательно прочитать техническое описание DRV8834 перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (см.0584 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации). Вот некоторые из основных особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Шесть различных шагов разрешения: полный шаг, полушаг, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Интеллектуальное управление прерыванием, которое автоматически выбирает правильный текущий режим затухания (быстрое затухание или медленное затухание)
- Диапазон напряжения питания 2,5–10,8 В
- Встроенный регулятор (не требуется внешний источник питания логики)
- Может напрямую взаимодействовать с системами 3,3 В и 5 В
- Отключение при перегреве, отключение по перегрузке по току и блокировка при пониженном напряжении
- Защита от короткого замыкания на землю, питания и нагрузки
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
- Размер модуля, схема расположения выводов и интерфейс в большинстве случаев соответствуют нашим корпусам драйверов шаговых двигателей A4988 (дополнительную информацию см. внизу этой страницы)
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера DRV8834, установленными, как показано на изображении продукта.
В качестве альтернативных, совместимых по выводам драйверов шаговых двигателей, которые работают с более высокими напряжениями питания двигателя, рассмотрите наши шасси DRV8825, шасси DRV8880, шасси MP6500 и A49.88 (также доступен в версии Black Edition и версии с регуляторами напряжения).
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Драйвер шагового двигателя DRV8834 поставляется с одной 1×16-контактной отламывающейся 0,1-дюймовой контактной полосой. Заголовки могут быть припаяны для использования с макетными платами без пайки или 0,1-дюймовыми гнездовыми разъемами. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате.
Использование драйвера
Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя DRV8834 (1/4-шаговый режим). |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания двигателя составляло 2,5–10,8 В для подключения к VMOT и GND. Этот источник питания должен иметь соответствующие развязывающие конденсаторы рядом с платой и должен обеспечивать ожидаемый ток шагового двигателя.
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 11,8 В для DRV8834 и привести к необратимому повреждению платы, даже если напряжение питания двигателя составляет всего 9 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться DRV8834, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае переподключение чего-либо под напряжением вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как DRV8834, обеспечивает более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (величины шага) (M0 и M1) позволяют выбрать один из шести шагов разрешения в соответствии с таблицей ниже. M0 по умолчанию является плавающим, в то время как M1 имеет внутренний подтягивающий резистор на 200 кОм, поэтому, если эти два контакта выбора микрошага отключены, получается 1/4-шаговый режим. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| М0 | М1 | Разрешение микрошага |
|---|---|---|
| Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Полушаг |
| Плавающий | Низкий | 1/4 ступень |
| Низкий | Высокий | Шаг 1/8 |
| Высокий | Высокий | Шаг 1/16 |
| Плавающий | Высокий | Шаг 1/32 |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Эти входы по умолчанию имеют низкий уровень через внутренние понижающие резисторы на 200 кОм. Если вы просто хотите вращение в одном направлении, вы можете оставить DIR отключенным.
Чип имеет два разных входа для управления состоянием питания: SLEEP и ENBL. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что драйвер подключает вывод SLEEP к низкому уровню через внутренний понижающий резистор 500 кОм, а вывод ENBL подключается к низкому уровню через внутренний подтягивающий резистор 200 кОм. Состояние SLEEP по умолчанию запрещает работу драйвера; этот контакт должен быть высоким, чтобы активировать драйвер (его можно подключить непосредственно к логическому «высокому» напряжению от 2,5 до 5,5 В, или им можно динамически управлять, подключив его к цифровому выходу MCU). По умолчанию вывод ENBL включен, поэтому этот вывод можно оставить отключенным.
Схема контактов nSLEEP и nFAULT на шасси DRV8824/DRV8825/DRV8834. |
|---|
DRV8834 также имеет выход FAULT, который устанавливает низкий уровень всякий раз, когда полевые транзисторы H-моста отключены в результате защиты от перегрузки по току или теплового отключения, или когда блокировка при пониженном напряжении отключает микросхему. Несущая плата соединяет этот контакт с контактом SLEEP через резистор 10 кОм, который действует как подтягивающий сигнал FAULT всякий раз, когда SLEEP внешне удерживается высоким, поэтому на выводе FAULT нет необходимости во внешнем подтягивании. Обратите внимание, что носитель включает в себя защитный резистор 1,5 кОм последовательно с выводом FAULT, что делает безопасным подключение этого вывода непосредственно к источнику логического напряжения, что может произойти, если вы используете эту плату в системе, предназначенной для совместимого по выводам A49.88 перевозчик. В такой системе резистор 10 кОм между SLEEP и FAULT затем будет действовать как подтягивающий для SLEEP, делая носитель DRV8834 более прямой заменой A4988 в таких системах (A4988 имеет внутреннюю подтяжку на SLEEP). штырь). Чтобы сбои не отключали контакт SLEEP, любой внешний подтягивающий резистор, который вы добавляете к входу контакта SLEEP, не должен превышать 4,7 кОм.
Дополнительные штыревые перемычки
Контакт CONFIG на DRV8834 можно использовать для выбора между режимом индексатора по умолчанию, который предназначен для управления шаговыми двигателями, и режимом альтернативной фазы/включения, который можно использовать для управления двумя коллекторными двигателями постоянного тока. Он недоступен по умолчанию (во избежание конфликтов при использовании держателя DRV8834 в качестве замены для других наших держателей драйверов шаговых двигателей), но его можно подключить к контакту с маркировкой «(CFG)» путем перемычки на поверхностном монтаже. перемычку, указанную на рисунке ниже. Вторую перемычку можно шунтировать, чтобы опорное напряжение ограничения тока было доступно на контакте с надписью «(REF)».
Ограничение тока
youtube.com/embed/89BHS9hfSUk?fs-1&rel=0&wmode=transparent» frameborder=»0″ allowfullscreen=»1″>
Для достижения высокой скорости шага питание двигателя обычно выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А при сопротивлении катушки 5 Ом, что указывает на максимальное напряжение питания двигателя 5 В. Использование такого двигателя с напряжением 9 В позволит увеличить скорость шага, но ток должен быть активно ограничен до значения менее 1 А, чтобы предотвратить повреждение двигателя.
DRV8834 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Обычно вам нужно установить ограничение тока драйвера на уровне или ниже номинального тока вашего шагового двигателя. Один из способов установить ограничение тока — перевести драйвер в полношаговый режим и измерить ток, протекающий через одну катушку двигателя, без тактирования входа STEP. Измеренный ток будет в 0,7 раза превышать предельный ток (поскольку обе катушки всегда включены и ограничены примерно 70% от установленного предельного тока в полношаговом режиме).
Другой способ установить ограничение тока — измерить напряжение на контакте «ref» и рассчитать результирующее ограничение тока (резисторы измерения тока: 0,100 Ом ). Напряжение опорного вывода доступно через переходное отверстие, обведенное кружком в нижней части печатной платы, или через контакт с маркировкой «(REF)», если подключена соответствующая перемычка для поверхностного монтажа (см. выше). Ограничение тока в амперах относится к эталонному напряжению в вольтах следующим образом:
«text(Current Limit) = text(VREF) * 2«
или переставить для решения для VREF:
«text(VREF) = text(Current Limit) / 2«
Так, например, если у вас есть шаговый двигатель, рассчитанный на 1 A, вы можете установить ограничение тока до 1 А путем установки опорного напряжения на 0,5 В.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока . Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Соображения по рассеиваемой мощности
ИС драйвера DRV8834 имеет максимальный номинальный постоянный ток 1,5 А на катушку, и в наших тестах эта несущая плата была способна обеспечивать номинальный ток в течение многих минут без дополнительного охлаждения. DRV8834 может поддерживать пиковые токи до 2,2 А на катушку, но его защита от перегрузки по току может срабатывать при токах до 2 А, а фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1,5 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжется задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами. Кроме того, обратите внимание, что ток катушки зависит от установленного предела тока, но не обязательно.0584 равно настройке ограничения тока. Фактический ток через каждую катушку изменяется с каждым микрошагом. См. техническое описание DRV8834 для получения дополнительной информации.
Схематическая диаграмма
Схематическая диаграмма низковольтного шасси драйвера шагового двигателя DRV8834. |
|---|
Эта схема также доступна для скачивания в формате pdf (105k pdf).
Основные различия между DRV8834 и A4988
База DRV8834 была разработана, чтобы быть максимально похожей на нашу A4988 драйверов шаговых двигателей, и его можно использовать в качестве замены для шасси A4988 во многих приложениях, поскольку он имеет тот же размер, распиновку и общий интерфейс управления. Однако следует отметить несколько различий между двумя модулями:
DRV8834 низковольтный драйвер драйвера шагового двигателя. |
|---|
Держатель драйвера шагового двигателя A4988, Black Edition (показан с оригинальными зелеными резисторами измерения тока 50 мОм). |
|---|
- Вывод, используемый для подачи логического напряжения на A4988, используется в качестве выхода FAULT DRV8834, поскольку DRV8834 не требует питания логики (а A4988 не имеет выхода неисправности). Обратите внимание, что безопасно подключать вывод FAULT непосредственно к источнику питания логики (для его защиты имеется резистор 1,5 кОм между выходом IC и выводом), поэтому модуль DRV8834 можно использовать в системах, предназначенных для A4988, которые маршрутизируют логику. питание на этот контакт.
- Штырек SLEEP на DRV8834 не поднят по умолчанию, как на A4988, но несущая плата подключает его к выводу FAULT через резистор 10 кОм. Следовательно, системы, предназначенные для A4988, которые направляют питание логики на вывод FAULT, фактически будут иметь подтяжку 10 кОм на выводе SLEEP.
- Потенциометр ограничения тока находится в другом месте.
- Связь между настройкой ограничения тока и напряжением опорного контакта отличается.
- DRV8834 предлагает микрошаговый шаг 1/32; A4988 опускается только до 1/16 шага.
- DRV8834 имеет только два контакта для установки режима микрошага; у A4988 их три. Таблица выбора шага отличается для DRV8834 и A4988 для всех разрешений микрошагов, кроме полношагового и полушагового режимов. В DRV8834 вывод M0 необходимо оставить в плавающем (высокоимпедансном) состоянии для выбора некоторых режимов микрошага. Режим микрошага по умолчанию на DRV8834 — 1/4 шага, а режим микрошага по умолчанию на A4988 — полный шаг.
- DRV8834 не имеет входа RESET.
- Контакты на плате DRV8834, соответствующие контактам MS3 и RESET платы A4988, по умолчанию отключены. Если электрическая совместимость с шасси A4988 не имеет значения, два разных сигнала (CONFIG и VREF) на шасси DRV8834 можно подключить к этим контактам с помощью перемычек для поверхностного монтажа (описанных выше в разделе «Дополнительные перемычки»).
- Требования к синхронизации для минимальной длительности импульса на выводе STEP различаются для двух драйверов. Для DRV8834 высокий и низкий импульсы STEP должны быть не менее 1,9. нас; они могут быть всего 1 мкс при использовании A4988.
- DRV8834 поддерживает более низкие напряжения питания, чем A4988, но его максимальное напряжение питания также ниже (2,5–10,8 В против 8–35 В).
- DRV8834 может отдавать больший ток, чем A4988, без какого-либо дополнительного охлаждения (на основе наших полношаговых тестов: 1,5 А на катушку для DRV8834 против 1,2 А на катушку для A4988 Black Edition и 1 А на катушку для исходного носителя A4988). ).
- DRV8834 использует другое соглашение об именах для выходов шагового двигателя, но они функционально такие же, как соответствующие контакты на A49.88, поэтому одинаковые подключения к обоим драйверам приводят к одинаковому поведению шагового двигателя. На обеих платах первая часть этикетки идентифицирует катушку (таким образом, у вас есть катушки «A» и «B» на DRV8834 и катушки «1» и «2» на A4988).
- Для тех, кто работает с приложениями, чувствительными к цвету, обратите внимание, что носитель DRV8834 белого цвета.
Таким образом, шасси DRV8834 достаточно похоже на наши шасси A4988, поэтому минимальная схема подключения для A4988 также является допустимым альтернативным способом подключения DRV8834 к микроконтроллеру:
Альтернативная минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя DRV8834 (1/4-тактный режим). |
|---|
Этот товар часто покупают вместе с:
| Универсальная алюминиевая монтажная втулка Pololu для вала 5 мм, отверстия № 4–40 (2 шт. в упаковке) |
| : биполярный, 200 шагов/об, 20×30 мм, 3,9 В, 0,6 А/фаза |
| Шаговый двигатель: биполярный, 200 шагов/об, 28×32 мм, 3,8 В, 0,67 А/фаза |
EasyDriver — Драйвер шагового двигателя — ROB-12779
4.
2 из 5
На основании 39 оценок:
Сейчас просматриваются все отзывы покупателей.
Показаны результаты со звездным рейтингом.
1 из 1 нашел это полезным:
Управление двигателем стало очень простым!
от пользователя #404942
проверенный покупатель
У меня их 18, чтобы управлять кучей моторов (ROB-09238) одновременно. Каждый из них работал безупречно и выдерживал мощность без каких-либо регулировок. Программирование было несложным с использованием библиотеки AccelStepper. Использовал Mega 2560 для управления логикой шага и направления.
Произошла катастрофа: три мои платы были зажаты панелью МДФ и конденсаторы были вырваны напрочь. Я заменил колпачки на типичные полярные колпачки (высокие банки), и платы снова работают нормально.
1 из 1 нашел это полезным:
Умелый маленький водитель
от участника #356554
проверенный покупатель
Честно говоря, это не сработало для проекта, который я планировал. Отсутствие гибкости в выборе + или — общего для моих сигналов было проблемой. Однако я не разочарован, я смогу разрабатывать будущие проекты с учетом этого недостатка. В целом, стоит цена.
1 из 1 нашли это полезным:
Работал отлично, пока я не поджарил его
Брэндон Джеймс
проверенный покупатель
После того, как я сделал свой собственный шаговый двигатель, он стоит всех денег, чтобы просто сделать это для вас. Работает фантастически, легко интегрируется, загнал мой прямо с raspberry pi. Выделяет много тепла, если вы используете двигатель на полную мощность, рассмотрите возможность установки вентилятора где-нибудь. Горшок очень маленький, я крутил его металлической отверткой, и он соскользнул, я задел конденсаторы под ним, он заискрился и перестал работать. облом. Я все равно буду заказывать замену! Это зажгло и это весело, Sparkfun.
Редактировать: после проблем с использованием 5 В, которые он подает на тинси, и глядя на схему, в ней нет обратного диода, обязательно включите его в свой проект, если вы собираетесь использовать эту мощность!
4 из 4 нашли это полезным:
Отлично — только будьте осторожны с EMI!
от RobotCamera
проверенный покупатель
Работает хорошо. Простота использования буквально с любым микроконтроллером, который только можно себе представить. Я использую свой с Arduino Pro Mini 3,3 В.
Просто остерегайтесь электромагнитных помех. Контактные площадки A/B и дорожки, ведущие к ним, вместе с контактами на микросхеме и вашими кабелями, ведущими к шаговому двигателю, сбрасывают массу электромагнитных помех. Это не ошибка платы, это просто то, что происходит, когда вы переключаете шаговый двигатель. Он может возиться с соседними микроконтроллерами и микросхемами. Так что будьте осторожны при планировании своего проекта — устанавливайте некоторое расстояние между EasyDriver + шаговый двигатель и другими компонентами, если можете. Если вы не можете изолировать их на расстоянии, защитите чувствительные компоненты проводящим заземленным материалом.
Я переписывался с Брайаном, когда имел дело с проблемами EMI в моем проекте, он очень хорошо осведомлен и вежлив. Отличная поддержка.
Чип может нагреваться на ощупь. Я рассматриваю возможность добавления радиатора в верхнюю часть чипа.
1 из 1 нашел это полезным:
Легко использовать
от Dan199
проверенный покупатель
Это так просто в использовании. В примере кода с веб-сайта очень просто показано, как использовать этот драйвер. Становится очень тепло. Но если вы используете спящий режим, когда двигатель не должен быть включен, плата драйвера успеет слишком остыть.
1 из 1 нашли это полезным:
Работает, но чип горячий
Джон13
проверенный покупатель
Работает отлично, но чип греется при токе 0,5 ампера. Вероятно, это не проблема, но я купил более крупную и немного более дорогую версию (2 ампера), и она работает без заметного нагрева чипа.
Я мог бы добавить, что я не использовал какой-либо связанный код ни для большой, ни для маленькой версии. Я не вижу очевидной необходимости менять параметры микрошага на лету (кроме, может быть, для тестирования), поэтому я жестко подключил их и просто использовал элементы управления направлением и шагом. Я управляю направлением выхода порта и шагаю от счетчика, который автоматически переключает выходной контакт при достижении выбранного значения. (Обратите внимание, что это выходит за рамки стандартного ввода-вывода Audrino, но в долгосрочной перспективе это намного проще. Я предлагаю всем хотя бы взглянуть на руководство Atmel для микросхемы Arduino и попробовать использовать некоторые регистры напрямую.)
1 из 4 нашли это полезным:
Не так здорово, как я надеялся
от участника #678454
проверенный покупатель
Имея в виду, что я новичок в использовании Arduino и сопутствующих продуктов, я действительно разочарован качеством кодирования, которое я нашел на этой плате. Кажется, что все в восторге от него, поэтому покупка была закономерным решением. К сожалению, я чувствую, что вернулся в Commodore 64 дня, загружая тонны кода только для того, чтобы обнаружить, что они не работают. Поэтому я трачу часы на то, чтобы ничего не пропустить и не добавить. И вообще у меня нет. Итак, я заканчиваю тем, что пытаюсь выяснить, что было непреднамеренно добавлено или опущено автором. Затем я начинаю просматривать другие коды и вставлять части того, что, по моему мнению, сработало в новый код, только чтобы обнаружить, что они также несовместимы. Эта доска не исключение. Я уверен, что это, вероятно, такой же хороший продукт, как и другие, но лично я пока не являюсь его большим поклонником. Кстати, у меня тоже есть Seeed Motor Shield и Adafruit Motor Shield V2.0 и у меня точно такие же чувства к ним.
Отлично, просто, но нужна настроенная библиотека arduino
от участника #422113
проверенный покупатель
Это отличный способ управления шаговым двигателем.
Но… Библиотеки шаговых двигателей Arduino отлично подходят для управления подключением к 4-проводному драйверу. Некоторые из них, я уверен, разобрались с задержками, чтобы они не влияли на синхронизацию остальной части вашего кода.
Простой шаговый драйвер был бы намного мощнее, если бы библиотека arduino была настроена (для простых людей, таких как я :), особенно если бы также были включены время ускорения и замедления. Мне трудно писать код без использования задержки в моем проекте. Может я просто не такой умный 🙂
Тек.
еще не знаю
от участника #812198
проверенный покупатель
Было бы неплохо, если бы Вы предложили к продаже необходимые клеммные колодки, необходимые для купленных плат.
Спасибо
Облегчает жизнь
от пользователя #322613
проверенный покупатель
Подключить его к микроконтроллеру очень просто, а изменить логику на 3.3 вместо 5 просто. В то время как чип может работать быстрее, мой шаговый двигатель не может, поэтому я убедился, что он не пропускает обязательные пробы и ошибки, пока не нашел минимальную задержку, которую может достичь комбинация контроллера и двигателя. Если вы спешите просто заставить все работать (как я), это действительно отличный простой драйвер. Обязательно найдите время, чтобы отрегулировать ограничение тока для вашего двигателя с помощью контрольной точки, прежде чем подключать двигатель — в руководстве есть формула отношения напряжения к току. Для низкой стоимости это очень удобно.
Работал отлично!
от участника #866144
проверенный покупатель
Работал точно так, как должен был
от участника #865449
проверенный покупатель
Я использую его для привода всех своих акриловых часов-скелетонов. Это надежно и доступно 24/7…
работает отлично
от пользователя #884667
проверенный покупатель
отлично работает при правильном использовании. .. Легко взорвется при неправильном использовании, ха-ха
Отличный водитель
от участника #408903
проверенный покупатель
Работает так, как рекламируется, прост в использовании, просто следуйте инструкциям на веб-странице продукта. Обязательно прислушайтесь к их примечанию с просьбой не подключать / отключать двигатель, когда драйвер включен; это убьет ваш EasyDriver, так что не делайте этого! Я неплотно подключил свой двигатель к плате, и во время тестирования он оторвался, и мой драйвер умер; к счастью, я купил две платы, ожидая, что сожгу первую, поэтому я убедился, что во второй раз припаял правильные клеммы к драйверу, и теперь все работает безупречно.
Отличный, доступный вариант
от участника № 588721
проверенный покупатель
Я новичок в использовании драйверов шаговых двигателей и собирал собственную схему. Он больше, чем большинство других драйверов, но это здорово, когда я пытаюсь научиться использовать драйвер, и мне не нужно, чтобы он напрямую взаимодействовал с чем-либо еще.
Раньше я был разочарован, и после того, как я заказал их, я мог с радостью перейти к следующим шагам в моем проекте. Четкая документация и маркировка, сделанные с их помощью.
Вроде работает хорошо, но чип сильно греется
ГарднерТек
проверенный покупатель
Плата хорошо работает и легко программируется. Я заметил, что делать маленькие шаги или всего несколько полных оборотов — это нормально. После полных оборотов и почти высокой скорости чип сильно нагревается, и двигатель начинает работать рывками. Вероятно, это решит радиатор. Кто-нибудь сталкивался с этим и порекомендовал конкретный радиатор?
Отличная доска
от Бокочоко
проверенный покупатель
Мне нравится эта доска. Это намного проще, чем я думал. Моим единственным изменением будет перемещение всех контактов в одну сторону, чтобы упростить подключение.
Отличное устройство, отличное руководство по подключению
от участника #836901
проверенный покупатель
Очень прост в использовании, следуя инструкциям Sparkfun по подключению. Работает как обещал. Я читал комментарии о количестве тепла, которое он выделяет, но я не видел никаких проблем в этом отношении. EasyDriver — это простая покупка для вашего шагового двигателя.
отличный для своего размера
от участника #1070410
проверенный покупатель
первоклассный продукт за опыт, который у меня есть и который я приобретаю с каждым проектом, который я делаю
настоятельно рекомендуется
Хорошо работает в моем проекте
от участника № 166004
проверенный покупатель
Он может выполнять 4000 шагов в секунду, управляемый Arduino Pro Mini с частотой 16 МГц. Вполне нормально. Он надежен, но я всегда выключаю мотор после того, как сделаю 6000 шагов или меньше. Если вы оставите его включенным, через него непрерывно будет течь полный запрограммированный ток, и он станет очень, очень горячим. Горячо обожгите палец. Я бы порекомендовал радиатор, если вы собираетесь оставить двигатель включенным (например, при микрошаге).
Поскольку модуль стоит дорого, я провел все свои испытания с подделками и поджарил два из них, а затем добавил этот модуль в готовый продукт для надежности. Я настоятельно рекомендую этот драйвер для небольших двигателей.
пока работает нормально
от пользователя #1251513
проверенный покупатель
Мне не удалось протестировать его с правильным типом шагового двигателя. Тот, что у меня сейчас, берет около 2 А, а столько драйвер выдать не может. Моторчик крутится, но не на той скорости, которая мне нужна. Лучший мотор уже в пути, проблем не ожидаю, как только он прибудет.
Кстати, он очень прост в использовании!
работает как рекламируется
от пользователя № 736210
проверенный покупатель
Это устройство работало, как заявлено. В конце концов я перешел на Big Easy Driver, потому что мне нужно было больше тока.
EasyDriver — это удобный шаговый контроллер!
от пользователя #625063
проверенный покупатель
Я использовал PIC16F18855 для сопряжения и анализа нескольких датчиков в научных целях. На позднем этапе разработки прототипа стала очевидной необходимость в стадии точного перемещения с шаговым управлением. Из-за нехватки времени, ресурсов процессора и места на печатной плате я решил попробовать EasyDriver. Реализация шагового двигателя и прошивка были выполнены всего за 30 минут благодаря ясной, точной и серьезной документации, которая окружает функциональность платы. С помощью нескольких модификаций я смог еще больше уменьшить размер платы, подключив выходной регулятор EasyDriver +5/3,3 В для питания большинства приложений. Если вам нужен надежный гибкий шаговый контроллер, но вы предпочитаете тратить свое время на другие аспекты вашего приложения, EasyDriver вам поможет!
Работает супер хорошо.
от пользователя #837686
проверенный покупатель
Я худший программист в мире, но даже я понял это, и мне это нравится. Спасибо!
Бретт Р
Подключи и играй
от участника № 1282770
проверенный покупатель
Документация была достаточно подробной, чтобы я мог написать простой скрипт на Python для моей платы Asus tinker, встроенный режим 3,3 В сделал все просто и ясно, расположение выводов имело смысл, а маскировка на плате была сделана хорошо. Как и все доски от sparkfun, она очень хорошо сделана.
0 из 1 нашел это полезным:
ВНИМАНИЕ: Нет защиты от обратной полярности.
от участника № 1331550
проверенный покупатель
Только осторожно с ним, один косяк с проводом или пайкой на входе питания на плате и готово.
Всего четыре звезды, но не по вине водителя!
от участника № 1374590
проверенный покупатель
У меня было очень простое временное приложение для вращения одного двигателя с помощью генератора функций. Это работало без каких-либо проблем, но я вряд ли потребую больше от этой платы на данный момент.
Я не могу дать ему пять звезд (пока), потому что я едва протестировал его.
Разные продукты для разных людей?
от участника #1493724
проверенный покупатель
Соавтор прислал нам ссылку, по которой он купил легкий драйвер. Нам сообщили, что штифты пришли припаянные, заказали такой же товар. Принимая во внимание, что когда мы заказывали, в комплекте не было штифтов или припаяных. Я общался со службой поддержки, и они сказали, что не продают ничего с припаянными контактами, кроме одного другого продукта. За 22,9 доллара0, включая доставку, они должны быть запаяны и готовы к использованию.
3D печатная насыпь для доски
от участника № 1340323
проверенный покупатель
Плата 21 х 49 х 7,6 мм. Крепежные отверстия имеют диаметр 3,3 мм. Перейдите на thingiverse, если вы хотите выбрать одно из нескольких доступных средств передвижения. Мне понравилось https://www.thingiverse.com/thing:3477410
Отличный шаговый драйвер
Кшоматик
проверенный покупатель
Простота использования
Хорошо, но будьте осторожны
от пользователя № 1623255
проверенный покупатель
Этот продукт работает так, как описано, однако НЕ отключайте шаговый двигатель, пока на плату и шаговый двигатель подается питание! Это поджарит чип, потому что нет встроенной защиты от обратной ЭДС. Я научился этому на собственном горьком опыте. Это также может быть потенциальной проблемой, если двигатель глохнет, но я не проверял это.
Соответствует своему названию — прост в сборке и эксплуатации
от участника #732101
проверенный покупатель
Силовые линии и линии управления просты в использовании. Мне не нужно ничего знать о шаговых двигателях, чтобы их использовать.
Единственным незначительным изменением является то, что я переместил регуляторы скорости двигателя MS1 и MS2 вместе на плату для облегчения подключения.
Быстро и просто
от участника #722773
проверенный покупатель
Нашел учебник для черного бигльбона, и он заработал в тот же день. С кодом. Хорошо задокументировано и прямолинейно
Облегчает работу
от пользователя #756647
проверенный покупатель
Мне понадобился микрошаг 1/8 для точного управления настроечным конденсатором в небольшой антенне с магнитной рамкой — Easy Driver сделал эту работу очень легкой.
Мне нравится этот Драйвер.
от JB_Remote
проверенный покупатель
Работал, как рекламируется !! Много вариантов, так что приятно иметь под рукой, поэтому, когда мне нужно собрать проект, это хороший выбор. Я взорвал один, но он был таким дешевым, что заменить его было проще, чем починить.
Работает
от пользователя #647838
проверенный покупатель
Он делает то, что написано на банке.
Однако эта центральная микросхема сильно нагревается. Я еще не выключал его (пока), но я бы рекомендовал переводить его в спящий режим, когда это возможно.
Большой
от пользователя #801638
проверенный покупатель
Отличный инструмент. Получил хорошую оценку за свой проект.
Управление шаговым двигателем
EZ10EN Управление шаговым двигателем + драйвер
Тип:
Контроллер + водитель
Размер кадра:
Непригодный
Вольтаж:
9–30 В постоянного тока
Усилители:
1 ампер
Разрешение шага:
1, 1/2, 1/4, 1/8
№ оси:
1
Встроенный интерфейс:
РС485
Обратная связь:
Кодер
Размер:
0,95 «х 1,4» (24 мм х 36 мм)
Сертификаты:
RoHS
EZHR17EN Управление шаговым двигателем + драйвер
Тип:
Контроллер + водитель
Размер кадра:
17
Вольтаж:
10–40 В постоянного тока
Усилители:
2 ампера
Разрешение шага:
1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/28, 1/256
№ оси:
1
Встроенный интерфейс:
РС485
Обратная связь:
Кодер
Размер:
1,6 «х 1,6» (41 мм х 41 мм)
Сертификаты:
RoHS
EZHR23ENHC Управление шаговым двигателем + драйвер
Тип:
Контроллер + водитель
Размер кадра:
23
Вольтаж:
12–40 В постоянного тока
Усилители:
7 ампер
Разрешение шага:
1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/28, 1/256
№ оси:
1
Встроенный интерфейс:
РС485
Обратная связь:
Никто
Размер:
2,25 «х 2,25» (57 мм х 57 мм)
Сертификаты:
RoHS
EZ4AXIS17XR-ST Управление шаговым двигателем + драйвер
Тип:
Контроллер + водитель
Размер кадра:
17
Вольтаж:
8–30 В постоянного тока
Усилители:
0,25 А на ось / 0,5 А пик.