Содержание
Контроллер трехфазного бесколлекторного двигателя | Силовая электроника
Хилл Мартин
Карташов Евгений
№ 5’2010
PDF версия
В статье обсуждаются требования к минимальным ресурсам, необходимым микроконтроллеру на базе Microchip PIC12 для управления скоростью трехфазного бесколлекторного двигателя постоянного тока (BLDC). Показано, как техника минимизации позволяет снизить количество выводов I/O (Input/Output) для данного применения до шести. Предполагается, что читатели знакомы с алгоритмами управления указанного типа двигателей.
Каковы должны быть минимальные ресурсы микроконтроллера, работающего в составе привода трехфазного BLDC-мотора? Для ответа на этот вопрос необходимо соотнести возможности чипсета с принципами управления указанного двигателя и предъявляемыми к устройству функциональными требованиями. Если мы рассматриваем рынок простых и дешевых схем управления скоростью в таких применениях, как вентиляторы и насосы, то проблема может быть существенно упрощена. Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Система управления BLDC-мотором
На рис. 1 приведена блок-схема управления BLDC-мотором, содержащая датчик Холла для формирования обратной связи по положению ротора (как правило, используется три датчика), потенциометр задания скорости, кнопки включения и выключения системы, датчик перегрузки по току и трехфазный силовой каскад, соединенный с мотором.
Рис. 1. Блок-схема управления BLDC-мотором
Общее количество независимых подключений контроллера составляет 11 (пять входов и шесть выходов). Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Технология минимизации ресурсов
В случае, если используется стандартный шестиступенчатый алгоритм управления BLDC-мотором, в каждый момент времени только два транзистора инвертора (один в верхнем плече и один в нижнем) находятся во включенном состоянии. Управление ключами трехфазного силового каскада не является комплиментарным, транзисторы открываются в т. н. «диагональном режиме». С точки зрения минимизации логики это является преимуществом, поскольку два из трех ключей верхнего уровня закрыты при нормальной работе привода. Сигнал управления третьим транзистором может быть извлечен из двух других с помощью нескольких резисторов и транзисторного инвертора, подключенного к третьему входу верхнего уровня моста (см. рис. 4 — принципиальная схема). Таким образом удается сократить количество использованных выводов контроллера с шести до пяти.
Существует несколько различных путей оптимизации количества системных входов, предназначенных для подключения датчиков Холла, потенциометра, сенсоров тока перегрузки и ключей «Пуск/ Стоп». Датчики Холла, как правило, встраиваются в BLDC-двигатель, поэтому целесообразно интегрировать в мотор и схему, формирующую цифровой интерфейс для их связи с микроконтроллером. Выход подобной схемы выполняется в виде откры- того коллектора с «подтягивающим» резистором. В этом случае требуется один датчик Холла и один цифровой вход микросхемы семейства PIC12F.
Для запуска мотора и задания скорости при включении системы один из входов верхнего плеча трехфазного инвертора может быть сконфигурирован как аналоговый вход. Для реализации данной задачи этот вывод подключается к резистивному делителю и потенциометру уставки, что позволяет задать и считать значение скорости перед пуском мотора.
Ключ «Пуск» кроме основной задачи может нести и дополнительную функцию снижения уставки скорости ниже минимального значения. В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
Функцию остановки запущенного двигателя удобно выполнять в комбинированном режиме «Пуск/Стоп» в ходе цикла коммутации. Таким образом, остановка мотора реализуется программно-аппаратным методом в процессе выбега. Когда ключ «Стоп» нажимается при вращении, все сигналы управления транзисторами верхнего уровня блокируются, программа анализирует состояние мотора и запускает режим торможения. В простейшем случае функция остановки может выполняться нормально-разомкнутым тумблером, подключенным параллельно описанной выше цепи защиты от токовой перегрузки.
В схеме защиты от перегрузки по току не задействован ни один из выводов I/O микроконтроллера, для этой цели используется цепь подключения питания микросхемы семейства PIC12, позволяющая включить схему в режим перезагрузки при возникновении аварии. Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
В результате проведенной оптимизации системе требуется один выделенный цифровой вход, а также один цифровой/аналоговый и четыре цифровых вывода, выполняющих функции выходов. Здесь не учтен тот факт, что для управления скоростью необходима широтно-импульсная модуляция напряжения, поступающего на BLDC-мотор. В нашем случае контрольные импульсы должны поступать на транзисторы нижнего уровня. В реальности, поскольку в системе используется режим шестиступенчатого управления, ШИМ-сигнал в любой момент времени подается только на один из трех нижних ключей инвертора.
Некоторые PIC-контроллеры обладают особой периферией, способной формировать программный «моторный» ШИМ-сигнал, в то время как другие могут вырабатывать ШИМ-напряжение только на одном из n выходов. В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).
В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).
Рис. 2. Аппаратная реализация схемы
Программа управления использует сигнал одного датчика Холла для синхронизации импульсов управления транзисторами инвертора, а также для определения моментов времени коммутации по так называемой технологии точного расчета траектории. Помимо всего прочего, это позволяет сформировать замкнутый контур управления скоростью при помощи простейшего ПИД-регулятора, на который поступает сигнал ошибки по скорости (рис. 3).
3).
Рис. 3. Блок-схема управления скоростью мотора
Выход PI-контроллера загружается в регистр коэффициента заполнения импульсов CCPR1, занимая восемь старших разрядов. Выход подсистемы формирования ШИМ-сигнала коммутируется вместе с одним из трех транзисторов нижнего плеча инвертора, что позволяет осуществлять управление мотором и контроль скорости.
Три встроенных таймера PIC12 используются для измерения скорости двигателя по сигналу датчика Холла (TMR1), задания периода коммутации (TMR2) и генерации прерывания после окончания периода предварительного расчета (TMR0).
При включении питания считывается уставка скорости, после чего система может быть запущена с помощью ключа «Пуск». После подачи команды на запуск привода происходит оценка положения ротора и активируется программа формирования короткой разомкнутой петли регулирования. Она работает до тех пор, пока не будет продетектировано появление следующего сигнала датчика Холла. С этого момента времени коммутация инвертора синхронизируется с положением ротора. После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
Аппаратная реализация системы управления включает трехфазный BLDC-мотор, низковольтный силовой модуль инвертора и контроллер PIC12F615, подключенный к модифицированной демо-плате Microchip. Было показано, что данная топология схемы позволяет использовать шесть I/O контактов микроконтроллера с многофункциональными выводами. Гибкая внутренняя периферия PIC12HV615 и встроенный параллельный регулятор дают возможность создать схему (рис. 4), выполняющую все необходимые для данного применения функции. Таким образом, создана основа для проектирования простых и дешевых систем управления скоростью в случаях, когда не требуется высокая точность работы привода.
Рис. 4. Принципиальная схема привода BLDC-мотора с контроллером PIC12HV615
Регуляторы хода для бесколлекторных моторов
RC Design / Статьи / Аппаратура Радиоуправления
Автор — Сергей Потупчик (serj)
- Вступление
- Основные характеристики контроллеров
- Особенности подключения
- Настройки
- Программирование
- Возможные проблемы
- О выключателях
- Производители контроллеров
- Заключение
Вступление
Данная статья посвящена практическим аспектам применения регуляторов хода (далее — контроллеров) для бесколлекторных моторов, и особенностям их эксплуатации.
Бесколлекторные моторы, и соответственно регуляторы хода для них можно разделить на 2 основных класса — с датчиками положения ротора и без них. Бездатчиковые проще в изготовлении, поэтому большинство моторов и контроллеров в настоящее время именно такие (кроме специальных автомодельных). Далее речь пойдет именно о бездатчиковых регуляторах хода.
Большинство применяемых в моделизме бесколлекторных моторов построены по принципу «вывернутого наизнанку» коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три.
Среди бесколлекторных моторов для моделизма можно выделить две основные группы — с внутренним ротором, где постоянный магнит вращается внутри обмоток, и с внешним ротором (outrunner). Последние имеют, как правило, большее количество магнитных полюсов, и больший крутящий момент по сравнению с моторами с внутренним ротором, что позволяет применять их на авиамоделях без использования редуктора — они могут «напрямую» крутить винты большого диаметра.
Основные характеристики контроллеров
Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд.
«Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Максимальное рабочее напряжение — указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Максимальные обороты (maximum rpm) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много… Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера.
Этот эффект не является признаком неисправности мотора ли контроллера.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 Кгц. У «продвинутых» контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Особенности подключения
Провода — не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов.
Есть несколько важных аспектов.
Самое главное — нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера.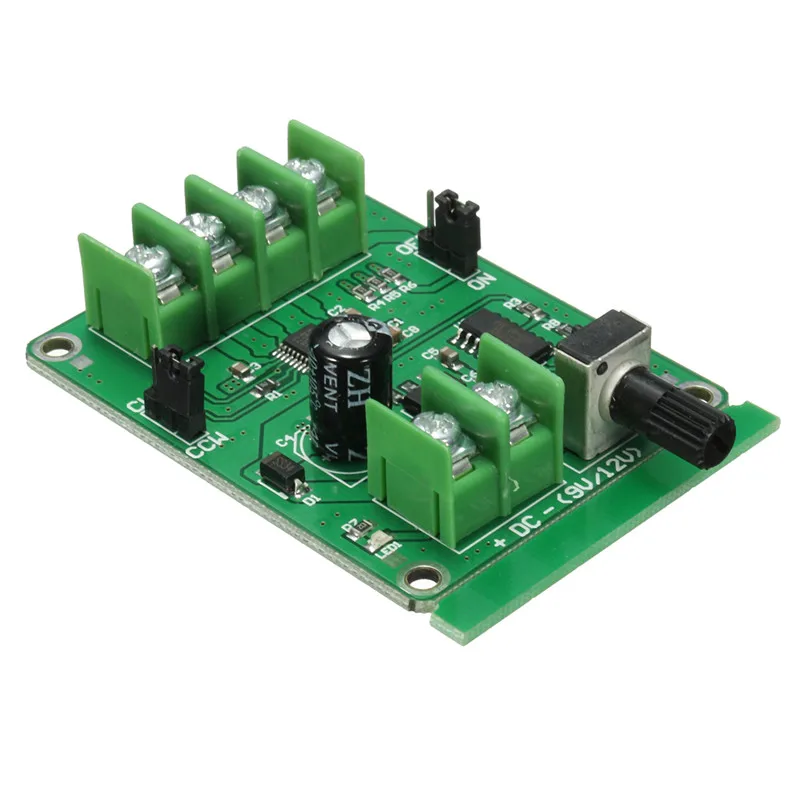 Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения — плавный (soft cut-off) и жесткий (hard cut-off).
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
При жестком — мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает. Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения от 5 до 15 градусов. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% — это важно для соревнований, где счет идет именно на эти проценты.
Для многополюсных моторов с внешним ротором ситуация иная — для них оптимальным по КПД и мощности является опережение 25-30°.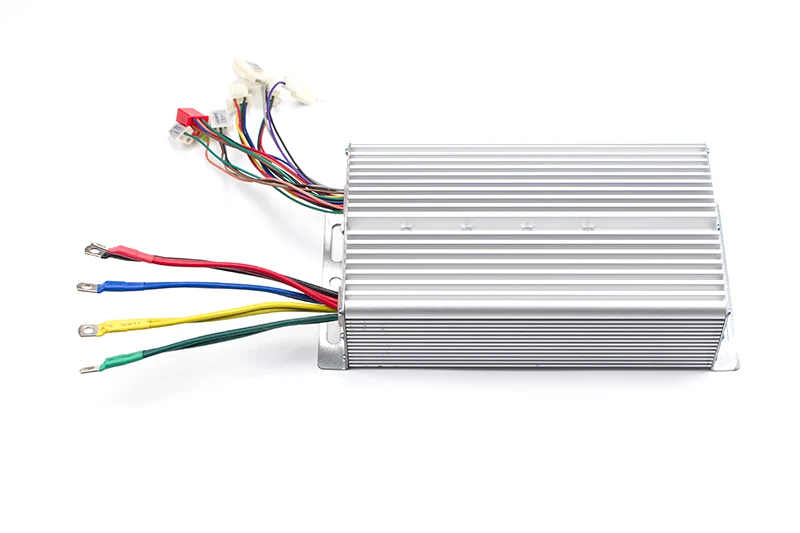 При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) — когда характеристика задана производителем.
Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
В некоторых контроллерах, например в Kontronik серии «Beat», нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом!
Программирование
Тут совет один — читайте внимательно инструкцию. Как правило, вход в режим программирования делается таким образом, что при нормальном использовании включить его очень затруднительно. В некоторых контроллерах для программирования есть специальные перемычки (джамперы), а создатели Castle Creations предусмотрели кроме обычного (с передатчика), программирование через компьютер, с помощью специального USB адаптера, подключаемого к контроллеру через разъем для приемника — просто и гораздо удобней, чем считать вспышки светодиода или писки мотора. ..
..
Из нюансов следует отметить, что у некоторых контроллеров, например ТММ, процедуру программирования следует провести до конца — все параметры записываются в конце цикла программирования, а у других — например Castle Creations — программирование можно закончить в любой момент.
Возможные проблемы
Как показывает практика — 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается — большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
Далее — попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Старые «золотые» Jeti серия Jes 18, отличаются, например одной особенностью — у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало — мотор остановился…
Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом «одумывается», и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
О выключателях
Наличие выключателя в контроллере — это дополнительное удобство, позволяющее не залезать каждый раз вовнутрь модели, чтобы включить или выключить аппаратуру. Некоторые производители контроллеров не ставят выключателей на контроллеры предназначенные для токов ниже 40А, таковы например Castle Creations и Astro Flight.
Привлекает решение проблемы выключателей у контроллеров ТММ. У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
Про «выключатель» у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен. И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично…
При выборе контроллера главный совет — внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Заключение
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Обсудить на форуме
Контроллеры бесщеточных двигателей постоянного тока
Серводвигатель? Хаб Мотор? Инраннер или Аутраннер? От нескольких ватт до 30 кВт, если ваш двигатель имеет постоянные магниты и имеет 3 провода питания, у Roboteq есть один или несколько контроллеров, которые заставят его вращаться. Независимо от размера вашего двигателя или конфигурации канала, просто сопоставьте номинальные значения напряжения и тока, используя приведенные ниже таблицы продуктов, или воспользуйтесь поиском продуктов Roboteq.
Независимо от размера вашего двигателя или конфигурации канала, просто сопоставьте номинальные значения напряжения и тока, используя приведенные ниже таблицы продуктов, или воспользуйтесь поиском продуктов Roboteq.
Семейство SBL
Маломощный/компактный
KBL/MBL Family
Средняя мощность
Семейство FBL
Дополнительные функции
Семейство GBL
Очень высокая мощность
Перейти к выбору продуктов
Купить продукты
Мобильные роботы нуждаются в двух двигателях для движения и управления. Только Roboteq может сделать это с помощью одного контроллера. По сравнению с традиционным подходом «Один двигатель/один контроллер» двухканальный вариант проще, дешевле и проще в интеграции и обслуживании.
Двигатели координируются внутри контроллера, что обеспечивает превосходные и безопасные характеристики привода.
Два контроллера могут даже объединиться, чтобы управлять 4 двигателями с колесами Mecanum для перемещения всенаправленных роботов. Мы можем показать вам, как это сделать.
Мы можем показать вам, как это сделать.
Прочитайте наше руководство Mecanum How-to
Добавьте магнитный датчик наведения Roboteq, и вы получите полностью функциональную машину с автоматическим управлением по линии, состоящую всего из двух компонентов.
Сделайте его еще лучше с нашей системой управления литиевыми батареями. Вы можете добавить модуль Robot IO eXtender Module (RIOX) с инерциальным измерительным блоком (IMU) для дополнительной стабильности. Используйте подходящие мотор/колеса в сборе от наших проверенных партнеров по двигателям. Загрузите программное обеспечение для магнитной навигации и получите бесплатную экспертную поддержку от Roboteq, чтобы все это работало на вас.
Как построить AGV с магнитным управлением
Узнайте о Robot IO eXtender и IMU
Нашими контроллерами можно управлять практически из любого места. От простых кнопок до джойстиков, радио, ПЛК или компьютеров, Roboteq может взаимодействовать с ним. Имеется большое количество импульсных/аналоговых/цифровых входов для концевых выключателей, потенциометров, энкодеров, кнопок или датчиков. Цифровые выходы обеспечивают торможение, освещение или соленоиды. Нужно больше ИО? Используйте наш RIOX IO eXtender через CANbus и не знайте ограничений!
Имеется большое количество импульсных/аналоговых/цифровых входов для концевых выключателей, потенциометров, энкодеров, кнопок или датчиков. Цифровые выходы обеспечивают торможение, освещение или соленоиды. Нужно больше ИО? Используйте наш RIOX IO eXtender через CANbus и не знайте ограничений!
Контроллеры бесщеточных двигателей работают за счет создания вращающегося магнитного поля внутри катушек двигателя. Затем следуют магниты ротора, вызывая вращение. В дополнение к обычному грубому 6-ступенчатому трапецеидальному вращению контроллеры Roboteq способны к более точному и тихому 512-ступенчатому синусоидальному вращению. Благодаря усовершенствованному полево-ориентированному управлению (FOC) двигатель всегда работает с оптимальной эффективностью.
Что такое поле-ориентированное управление?
Знание положения ротора в режиме реального времени необходимо для его плавного и эффективного вращения. Мы поддерживаем практически все известные типы роторных датчиков от самых распространенных до самых точных. Нет датчика? Без проблем! Мы также поддерживаем работу без датчиков.
Нет датчика? Без проблем! Мы также поддерживаем работу без датчиков.
Как работают бесщеточные двигатели
Вот некоторые из ключевых слов, которые все наши контроллеры понимают благодаря встроенному языку программирования MicroBasic. Думайте об этом как о встроенном ПЛК прямо в контроллер без дополнительной оплаты. Эта эксклюзивная функция Roboteq позволит вам настроить контроллер в соответствии с вашими самыми необычными требованиями.
Узнайте о сценариях MicroBasic
Все наши контроллеры имеют 1-мегабитный интерфейс CANbus. Используя простую пару проводов, вы можете заставить два или более контроллера работать вместе, подключиться к джойстикам, ПЛК, системам управления батареями или любому другому интеллектуальному датчику. А благодаря четырем различным доступным протоколам CAN вы можете быть уверены, что они смогут понять друг друга.
Узнайте о ячеистой сети RoboCAN
Большая часть функций контроллеров Roboteq никогда не используется. Однако эта неиспользуемая функциональность существует, потому что мы все знаем, что в конечном итоге «то, что может пойти не так, пойдет не так». От чрезмерных токов до повышенного/пониженного напряжения, от коротких замыканий до обрыва обратной связи — неожиданности не могут сравниться с бесщеточным контроллером двигателя постоянного тока от Roboteq!
Однако эта неиспользуемая функциональность существует, потому что мы все знаем, что в конечном итоге «то, что может пойти не так, пойдет не так». От чрезмерных токов до повышенного/пониженного напряжения, от коротких замыканий до обрыва обратной связи — неожиданности не могут сравниться с бесщеточным контроллером двигателя постоянного тока от Roboteq!
В приложениях для мобильных роботов «Стоп» всегда должен означать остановку. И «Всегда» на самом деле означает всегда, даже если контроллер мотора неисправен и не отвечает. Для этого все большее число наших контроллеров реализуют функцию STO — Safe Torque Off.
Нет необходимости в специальных инструментах программирования. Загрузите нашу бесплатную утилиту Roborun+ для ПК и начните изучать возможности!
Разгонитесь и поддерживайте нужную скорость с желаемым ускорением. Двигайтесь вперед или назад с контролируемым крутящим моментом. Остановитесь именно там, где вам нужно. Потребляйте или восстанавливайте энергию. Благодаря быстрой частоте обновления контура 1 мс, пяти основным режимам работы и множеству настраиваемых параметров наши контроллеры заставят ваш двигатель работать точно, плавно и быстро, как того требует ваше приложение.
Благодаря быстрой частоте обновления контура 1 мс, пяти основным режимам работы и множеству настраиваемых параметров наши контроллеры заставят ваш двигатель работать точно, плавно и быстро, как того требует ваше приложение.
Просмотреть все режимы
Высокая мощность при низком напряжении означает большой ток. Большой ток означает тепло. А чрезмерная жара означает беду! Полевые МОП-транзисторы со сверхвысокой эффективностью, сильноточные клеммы и проводка, а также инновационные методы охлаждения — это лишь некоторые из технологий, которые использует Roboteq, чтобы сделать наши контроллеры одними из самых крутых для своего размера.
Подробнее о токах и нагреве
Контроллеры Roboteq продемонстрировали надежность в ходе строгих заводских испытаний и многолетней эксплуатации в тысячах пользовательских приложений. Однако ничто так не иллюстрирует прочность нашего продукта, как этот сильно помятый блок. Он подвергся абсолютной жестокости, пережив более 200 боев боевых роботов, во время которых робота регулярно били, таранили и подбрасывали в воздух на 3 метра!
Прочитайте о качестве Roboteq
Наши контроллеры являются одними из самых сложных, но также и самыми простыми в использовании благодаря подробной документации, программным инструментам и примерам применения. Но если вы столкнетесь с трудностями, вы можете быть уверены, что получите своевременные и точные ответы от нашей высококвалифицированной службы поддержки. В конце концов, мы можем добиться успеха только в том случае, если вы добьетесь успеха!
Но если вы столкнетесь с трудностями, вы можете быть уверены, что получите своевременные и точные ответы от нашей высококвалифицированной службы поддержки. В конце концов, мы можем добиться успеха только в том случае, если вы добьетесь успеха!
ЛУЧШИЙ продукт
Я работал со многими контроллерами двигателей, и я должен сказать, что на данный момент это ЛУЧШИЕ из тех, с которыми я работал. Отличная работа над дизайном и программным обеспечением.
Т.К. — США
Лучшая документация
Я занимаюсь разработкой и проектированием продуктов уже довольно много лет, и я считаю, что это лучшее руководство, которое я видел за это время. Он полный, актуальный и пояснительный. Отличная работа!
B.V. – Нидерланды
Маломощные и компактные контроллеры бесщеточных двигателей постоянного тока. Одноканальный или двухканальный. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 30А и 60В. Нижняя проводящая пластина. Ориентирован на управление машинами и робототехнику. Контроллеры SBL1xxx поддерживают трапециевидный режим и требуют, чтобы датчики Холла приводили в движение двигатели. SBL2xxx также поддерживает синусоидальный режим с полевым управлением.
До 30А и 60В. Нижняя проводящая пластина. Ориентирован на управление машинами и робототехнику. Контроллеры SBL1xxx поддерживают трапециевидный режим и требуют, чтобы датчики Холла приводили в движение двигатели. SBL2xxx также поддерживает синусоидальный режим с полевым управлением.
Посмотреть продукты семейства SBL
Одноканальные бесщеточные контроллеры двигателей постоянного тока средней мощности. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 120А. Несколько вариантов напряжения до 60В. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Ориентирован на управление машинами и робототехнику. Предназначен для AGV и небольших электромобилей. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле. Доступно в базовой версии (MBL1xxx)
Посмотреть продукты семейства KBL/MBL
Очень мощные одноканальные многофункциональные контроллеры бесщеточных двигателей постоянного тока. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 300 А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Предназначен для электромобилей, бронетранспортеров, автомобилей для гольфа, погрузочно-разгрузочного оборудования, электрических лодок, транспортных средств с автоматическим управлением, сельскохозяйственных роботов и других приложений с высокой мощностью. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 300 А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Предназначен для электромобилей, бронетранспортеров, автомобилей для гольфа, погрузочно-разгрузочного оборудования, электрических лодок, транспортных средств с автоматическим управлением, сельскохозяйственных роботов и других приложений с высокой мощностью. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Продукты семейства FBL
Высокомощные одноканальные или среднемощные двухканальные контроллеры бесщеточных двигателей постоянного тока. Усовершенствованная 32-разрядная базовая технология, несколько вариантов подключения и поддержка сценариев. До 2 х 75 А или 1 х 150 А. Несколько вариантов напряжения до 96В. Построен в экструдированном алюминиевом корпусе. Ориентирован на мобильных роботов и небольшие электромобили. Доступен в версиях «Basic» и «Advanced Control». Контроллеры базовой версии работают только в трапециевидном режиме и требуют датчиков Холла для управления двигателями. Модели Advanced Control поддерживают синусоидальный режим и управление, ориентированное на поле.
Доступен в версиях «Basic» и «Advanced Control». Контроллеры базовой версии работают только в трапециевидном режиме и требуют датчиков Холла для управления двигателями. Модели Advanced Control поддерживают синусоидальный режим и управление, ориентированное на поле.
Посмотреть продукты семейства HBL
Очень мощные двухканальные и одноканальные многофункциональные контроллеры бесщеточных двигателей постоянного тока. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 2 х 180 А или 1 х 360 А. Несколько вариантов напряжения до 96В. Охлаждающая пластина с толстой проводимостью с крышкой из АБС-пластика. Дополнительное водяное охлаждение. Предназначен для погрузочно-разгрузочного оборудования, автоматизированных транспортных средств, транспортных средств для перевозки личного состава, сельскохозяйственных роботов и других приложений с высокой мощностью. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Посмотреть продукты семейства GBL
Двухканальные бесщеточные контроллеры двигателей постоянного тока средней мощности. Усовершенствованная базовая технология Roboteq, несколько вариантов подключения и поддержка сценариев. До 2 х 60А. Кондуктивная охлаждающая пластина с крышкой из АБС-пластика. Предназначен для AGV и небольших электромобилей. Поддержка трапециевидной коммутации и синусоидального режима с управлением, ориентированным на поле.
Просмотр моделей семейства OBL
Контроллеры бесщеточных двигателей
Контроллеры бесщеточных двигателей
Промышленные серии контроллеров HBCi и HSBC представляют собой современную технологию управления электродвигателями. Электрические регуляторы скорости от малой до высокой мощности, низкого и высокого напряжения изготавливаются во многих вариантах и конструкциях, чтобы полностью соответствовать потребности клиента . Вместе с верхним управлением они предлагают многочисленные возможности настройки, эксплуатации, связи, диагностики и многое другое.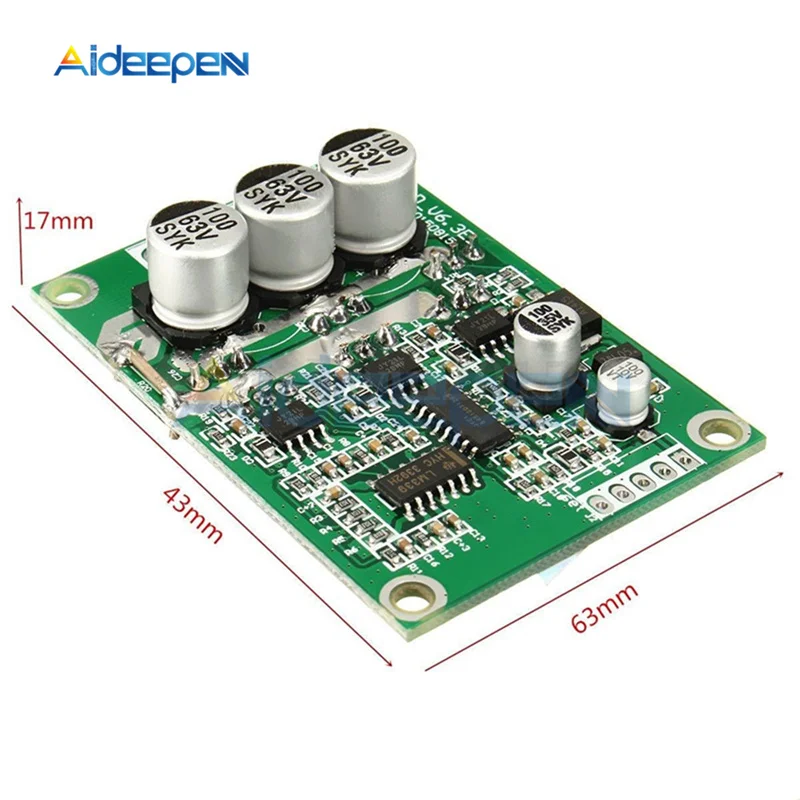 Это делает их идеальным решением для различных промышленных применений, электромобилей и широкого спектра продуктов и оборудования.
Это делает их идеальным решением для различных промышленных применений, электромобилей и широкого спектра продуктов и оборудования.
(100 кВт | 400 В | 400 А | 5800 г)
Электрические самолеты, промышленные дроны, электронные летательные аппараты, корабли, специализированное оборудование самые передовые модули IGBT для достижения максимальной эффективности. Они представляют собой интеллектуальное решение с высокопроизводительными 32-разрядными процессорами ARM Cortex, используемыми для управления. Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(38 кВт | 120 В | 320 А | 1257 г)
промышленные дроны, электрические самолеты, корабли, специализированное оборудование
Бесщеточные контроллеры постоянного тока серии HBCi СРЕДНЕГО НАПРЯЖЕНИЯ отличаются высокой производительностью. ESC для двигателей BLDC и PMSM средней мощности (до 38 кВт). Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(37 кВт | 63 В | 600 А | 1257 г)
электрические самолеты, корабли, БПЛА, специальные приложения
Бесколлекторные контроллеры постоянного тока серии HBCi LOW VOLTAGE представляют собой высокопроизводительные регуляторы скорости для двигателей BLDC и PMSM средней мощности (до 37 кВт). Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(19 кВт | 120 В | 160 А | 550 г)
промышленные дроны, электрические самолеты, корабли, специализированное оборудование до 19кВт). Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(18 кВт | 63 В | 300 A | 550 г)
Электронные доски для серфинга, ховерборды, корабли, специализированное и авиационное оборудование
Контроллеры бесщеточных двигателей постоянного тока серии HBCi LOW VOLTAGE представляют собой высокопроизводительные регуляторы скорости для средних производительностей BLDC и PMSM двигатели (до 18кВт). Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(13 кВт | 120 В | 110 А | 360 г)
промышленные дроны, корабли, специализированное и авиационное оборудование
Контроллеры бесщеточных двигателей постоянного тока серии HBCi СРЕДНЕГО НАПРЯЖЕНИЯ представляют собой 13кВт). Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(12 кВт | 63 В | 200 А | 360 г)
БПЛА, корабли, специализированное применение
Контроллеры бесщеточных двигателей постоянного тока серии HBCi LOW VOLTAGE представляют собой высокопроизводительные регуляторы скорости для двигателей BLDC и PMSM средней мощности (до 12 кВт). Этот класс предлагает отличное и непревзойденное соотношение размеров и веса при достижении высокой производительности. Они предлагают простую установку и настройку.
(6 кВт | 63 В | 180 А | 63 г)
БПЛА, корабли, специализированное применение
Эти контроллеры бесщеточных двигателей постоянного тока являются наиболее компактными с точки зрения физических размеров, что обеспечивает дополнительную вариативность в области установки. Тем не менее, диапазон производительности для этих контроллеров остается высоким, достигая до 6 кВт.
(3 кВт | 63 В | 50 А | 80 г)
БПЛА, корабли, специализированное применение
Контроллеры бесколлекторных двигателей серии HSBC являются одними из самых маленьких по габаритам и производительности (до 3 кВт). Они отличаются разнообразием конфигураций, надежностью, простотой установки и настройки.
Ничего не пропустите: подпишитесь на новости MGM-COMPRO
В сфере специальной электроники и электромобилей происходит столько всего, что мы хотим поделиться с вами последними новостями. Наша цель — сначала информировать вас о лучших продуктах, международных мероприятиях, проектах и программах исследований и разработок, в которых мы сотрудничаем.