Содержание
Устройство и принцип работы двигателя постоянного тока
Выберите ваш город
Устройство и принцип работы двигателя постоянного тока
Электротехника занимает особое место в жизни современного человека. Электродвигатель входит в перечень популярных устройств, что находят применение в разных направлениях деятельности человека. Недавно был опубликован текст, где детально изложены все нюансы силового агрегатного механизма, функционирующего в сети переменного тока.
Тема этой статьи затрагивает двигатель постоянного тока: устройство и принцип действия системы, особенности конструкции, способы коммуникации с электросетью и прочие нюансы.
Особенности силового агрегата
Ответ на вопрос: «из чего состоит двигатель постоянного тока» выглядит так:
- 1. Вал для монтажа остальных компонентов.
- 2. Роторный элемент (якорь), в который входят:
- 2.1 Сердечник – комплекс металлических элементов, изготовленных из стального сплава для электротехники.

- 2.2 Обмотка.
- 2.3 Коллектор.
- 2.4 Главный полюс – комплекс металлических элементов (пластин). В случае небольших агрегатных механизмов допустимо производство полюсов из магнитов.
- 2.5 Обмотка возбуждения.
- 2.6 Цельные вспомогательные полюсы (в малогабаритных системах отсутствуют) позволяют оптимизировать коммутацию. Их размещают между ключевых полюсов.
- 2.7 Обмотка из окрашенной проводки вспомогательного полюса.
- 3. Корпус двигателя изготавливают из чугуна. Этот металл хорошо зарекомендовал себя при эксплуатации в экстремальных условиях. Он обладает оптимальным значением износостойкости. Чтобы улучшить корпус, инженеры разрабатывают конструкцию с ребрами, позволяющими соблюдать правильный баланс температур при эксплуатации агрегата. Полюсы и якорь монтируют в корпус. Они нужны для формирования индуктора.
- 4. Конечные элементы обмотки зоны полюсов подключается к коробке с клеммами. В этом техническом блоке имеются модули, обеспечивающие сопряжение с индуктором и щетками якоря. Имеются технологические разъемы, позволяющие установить сальники (нужны для подвода силового кабеля). Существуют устройства небольшой мощности. Конструкция такого двигателя допускает вывод обмотки в коробку с клеммами, при этом один из зажимов полюсов и траверса щеток должны находиться в плотной коммуникации в машине. В коробку клемм следует выводить оставшиеся зажимы. Большие силовые агрегаты эксплуатируют в условиях значительного номинального напряжения. Следовательно, отсутствует необходимость в монтаже коробки клемм. Нижний блок станины выступает в виде точки вывода проводки. В случае параллельной системы допустимо использовать силовые кабели. Последовательное соединение предусматривает наличие шин.
 Имеются технологические разъемы, позволяющие установить сальники (нужны для подвода силового кабеля). Существуют устройства небольшой мощности. Конструкция такого двигателя допускает вывод обмотки в коробку с клеммами, при этом один из зажимов полюсов и траверса щеток должны находиться в плотной коммуникации в машине. В коробку клемм следует выводить оставшиеся зажимы. Большие силовые агрегаты эксплуатируют в условиях значительного номинального напряжения. Следовательно, отсутствует необходимость в монтаже коробки клемм. Нижний блок станины выступает в виде точки вывода проводки. В случае параллельной системы допустимо использовать силовые кабели. Последовательное соединение предусматривает наличие шин.
Имеются технологические разъемы, позволяющие установить сальники (нужны для подвода силового кабеля). Существуют устройства небольшой мощности. Конструкция такого двигателя допускает вывод обмотки в коробку с клеммами, при этом один из зажимов полюсов и траверса щеток должны находиться в плотной коммуникации в машине. В коробку клемм следует выводить оставшиеся зажимы. Большие силовые агрегаты эксплуатируют в условиях значительного номинального напряжения. Следовательно, отсутствует необходимость в монтаже коробки клемм. Нижний блок станины выступает в виде точки вывода проводки. В случае параллельной системы допустимо использовать силовые кабели. Последовательное соединение предусматривает наличие шин.
Устройство коллекторной машины постоянного тока предусматривает наличие следующих элементов:
- 1. Блок подшипников: щиты (на них монтируют наружные и внутренние крышки), шарнирные элементы.
- 2. Узел щеток: кронштейн, держатели, а также сами щетки. Система фиксируется на выпуклости крышки заднего щита. Она необходима для организации подачи энергии к ротору, а также для трансформации тока в якоре.
- 3. Вентилятор обеспечивает низкую температуру нагрева конструкции во время эксплуатации.
- 4. Пружины и болты для упрощения погрузки-разгрузки, а также установки двигателя.
- 5. Лапы для минимизации вибрации во время эксплуатации.
- 6. Кожух защиты вентилятора, а также кожух вывода обдува.
- 7. Шильдик с перечнем ключевых параметров.
 Система фиксируется на выпуклости крышки заднего щита. Она необходима для организации подачи энергии к ротору, а также для трансформации тока в якоре.
Система фиксируется на выпуклости крышки заднего щита. Она необходима для организации подачи энергии к ротору, а также для трансформации тока в якоре.
Способы подключения
Особого внимания заслуживает подключение двигателя постоянного тока к сети 220. На коробке клемм указывается определенная маркировка на основании параметров двигателя. На базе этих данных выбирается способ подключения кабельной системы. Рассмотрим все способы подачи питания более подробно.
Запуск обмотки от независимых источников
Такое устройство функционирует в случае, когда напряжение на обмотке и якорь получают питание энергией от разных источников энергии. В зону размещения силового кабеля подключаются два двужильных провода (серый и синий). Предварительно зачищаются края. Позднее их оснащают наконечниками.
В зону размещения силового кабеля подключаются два двужильных провода (серый и синий). Предварительно зачищаются края. Позднее их оснащают наконечниками.
Далее следует начать подключать каждую из жил. Инструкция по коммуникациям между жилами и клеммами представлена во внутренней части коробки клемм. Рекомендуется четко следовать предложенной системе действий. В рассматриваемом случае система выглядит следующим образом:
- 1. Синяя жила первого провода соединяется с клеммой Н1, а к клемме Н2 подключается серая жила.
- 2. Синяя жила второго провода сопрягается с клеммой Я2, а к клемме Д2 присоединяют серую жилу.
Последовательное и параллельное возбуждение обмотки
Чтобы подключить такие агрегаты, нужно завести один двужильный кабель (должны быть синяя и серая жилы). Концы зачищаются и оснащаются наконечники. Рассмотрим особенности каждого из них.
Когда идет подключение системы с параллельной активацией обмотки, следует выполнить монтаж перемычек между контактной парой Д2 и Ш1, а также Я2 и Ш2. Соответственно серая жила подключается к клемме Д2, а синий провод соединяется с клеммой Я2. Возможно аналогичное сопряжение с модулями Ш1 и Ш2.
Соответственно серая жила подключается к клемме Д2, а синий провод соединяется с клеммой Я2. Возможно аналогичное сопряжение с модулями Ш1 и Ш2.
Когда наблюдается последовательная активация сети, ставят перемычку из гибкого материала с обеих сторон клемм С2 и Я2. Силовой кабель с наконечниками подключается так: серый элемент в коммуникации с клеммой Д2 (как и в случае, что описан выше), при этом синий фрагмент подключается к клемме С2.
Особенности функционирования
Принцип действия двигателя постоянного тока кратко – актуальный вопрос, интересующий многих пользователей. Рассмотрим его максимально подробно.
Происходит подача напряжения, начинается процесс циркуляции электричества по проводам обмотки. Можно заметить формирование зоны полярности между смежными полюсами. Образуется определенного рода магнитная система, провоцирующая возникновение магнитного поля. Коллектор передает стабильный поток энергии на якорь, при этом с двух сторон наблюдается коммуникация с созданным магнитным полем. Электромагнитная индукция запускает вращающий момент. Происходит поворот ротора. Активизируется система щеток. Обеспечивается постоянное вращение ротора за счет тесной коммуникации элементов.
Электромагнитная индукция запускает вращающий момент. Происходит поворот ротора. Активизируется система щеток. Обеспечивается постоянное вращение ротора за счет тесной коммуникации элементов.
В электрическом двигателе якорь может вращаться в любом направлении. Трансформировать обороты можно при помощи простого действия. Достаточно сменить направление тока в обмотке. Для этого меняется полярность питающих жил в коробке клемм. Такого эффекта удается достигнуть за счет перестановки кабеля положительного заряда в отрицательное положение, а отрицательного заряда – в положительное значение соответственно. Новая схема подключения выглядит так: серую жилу соединяют с клеммой Н1 (Я2), а синий провод прикрепляют к клемме Н2 (Д2).
Когда меняются полярные зоны в системе запуска и вращающегося элемента, преобразование движения не наблюдается. Изменения становятся возможны только в случае, когда меняется направление тока в обмотке или якоре. Задачу удается реализовать, когда происходит монтаж подготовленных перемычек между контактной группой С1, Д2, С2.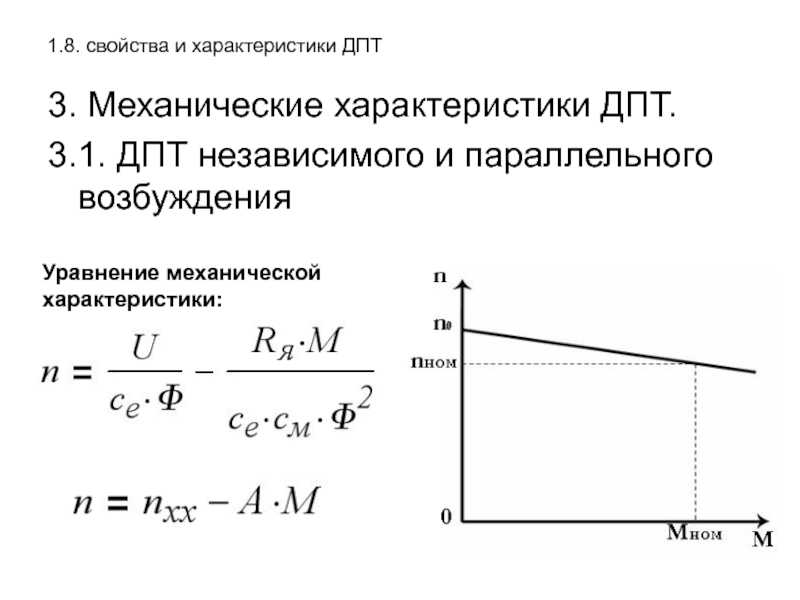 Для этого используется серый кабель. Питание подключается в таком порядке: серая жила подключена к клемме С1, а синяя — к клемме Я2.
Для этого используется серый кабель. Питание подключается в таком порядке: серая жила подключена к клемме С1, а синяя — к клемме Я2.
Перемычки между клеммами С1, Д2, С2 могут быть смонтированы при помощи синего провода. В этом случае схема подключения силового кабеля выглядит в обратном порядке от схемы, что изложена выше (серый провод соединяют с клеммой Я2, а синий провод сопрягают с клеммой С1).
Двигатель постоянного тока можно переключить в реверс. Для этого рекомендуется менять направление движения электричества в обмотке якоря. Подобное обстоятельство объясняет факт того, что обрыв провода в обмотке возбуждения может спровоцировать критическое увеличение ЭДС. В результате вероятнее всего будет наблюдаться пробой изоляции проводки.
Двигатель постоянного тока – это силовой агрегат, обеспечивающий функционирование электротехнических приспособлений. Выше детально рассмотрены устройство, принцип функционирования, а также способы подключения двигателя. Этот вопрос более детально изложен на видео, где специалисты на наглядном примере демонстрируют все нюансы, что описаны в этой статье.
Запрос цены
«», м.
Оформить заявку
Выберите свой город из списка
Принцип Действия Двигателя Постоянного Тока: Что Нужно Знать
Мощный двигатель постоянного тока
Тема нашей сегодняшней статьи — принцип действия электродвигателя постоянного тока. Если вы бываете на нашем сайте, то наверняка уже знаете, что эту тему мы решили раскрыть более полно и понемногу разбираем все разновидности электромотором и электрогенераторов.
Постоянный ток известен человечеству вот уже где-то 200 лет, эффективно применять его научились немного позже, а вот сегодня трудно себе представить деятельность человека, где бы энергия не применялась. Приблизительно таким же образом происходила и эволюция электрических двигателей.
Содержание
- Немного истории и теории
- Основные принципы функционирования
- Строение двигателя
- Продолжение теории
- Строение электромотора постоянного тока
- Особенности коллекторных двигателей
- Альтернатива коллекторному двигателю
- Управление двигателем постоянного тока
Немного истории и теории
Первые электрические двигатели
Бурное развитие электротехники не прекращается с момента зарождения этого направления в физике. Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
- Особую значимость имеют исследования М. Фарадея, который в 1821 году, проводя эксперименты по взаимодействию тока и разных проводников, выяснил, что проводник может вращаться внутри магнитного поля, ровно как вокруг проводника может вращаться и магнит.
- Второй этап развития занял более значительный отрезок времени от 1830-х до 1860-х годов. Теперь, кода основные принципы преобразования энергии человеку были известны, он пытался создать наиболее эффективную конструкцию двигателя с вращающимся якорем.
- В 1833 году американский изобретатель и по совместительству кузнец Томас Девенпорт смог построить первый роторный двигатель, работающий на постоянном токе, и сконструировать модель поезда, приводимую им в движение. На свою электрическую машину он получил патент спустя 4 года.

Б.С. Якоби
- В 1834 году Борис Семенович Якоби, русско-немецкий физик и изобретатель, создает первый в мире электродвигатель постоянного тока, в котором смог таки реализовать основной принцип работы таких машин, применяемый и сегодня – с постоянно вращающейся частью.
- В 1838 году, 13 сентября был произведен пуск настоящей лодки по Неве с 12-ю пассажирами на борту – так происходили полевые испытания двигателя Якоби. Лодка двигалась со скоростью 3 км\ч против течения. Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.
Лодка с лопастными колесами
Результатом проведенных испытаний стала возможность формирования основных принципов дальнейшего развития электромоторов:
- Во-первых, стало ясно, что расширение сферы их применения напрямую зависит от удешевления способов получения электрической энергии – требовался надежный и недорогой генератор, а не дорогостоящие на тот момент гальванические батареи.
- Во-вторых, требовалось создать достаточно компактные двигатели, которые бы, однако, обладали большим коэффициентом полезного действия.
- И в третьих – были очевидны преимущества двигателей с вращающимися неоднополюсными якорями, с постоянным вращающимся моментом.

Работа шунтового генератора
Затем наступает третий этап развития электромоторов, который ознаменован открытием явления самовозбуждения двигателя электрического тока, после чего был сформирован принцип обратимости таких машин, то есть двигатель может быть генератором, и наоборот. Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Интересно знать! Любая электрическая сеть подключена к электростанции, вырабатывающей ток. Сама станция, по сути, и есть набор мощнейших генераторов, приводимых в движение разными способами: течение реки, энергия ветра, ядерные реакции и прочее. Исключение составляют, разве что, фотоэлементы в солнечных батареях, но это уже другая, дорогая, пока не нашедшая достаточного распространения история.

Вид современной конструкции электродвигатель приобрел в далеком 1886 году, после чего в него вносились только доработки и усовершенствования.
Основные принципы функционирования
Двигатели постоянного тока и принцип действия: вспоминаем школьные уроки физики
В основу любого электрического двигателя положен принцип магнитного притягивания и отталкивания. В качестве эксперимента можете провести такой простейший опыт.
- Внутрь магнитного поля нужно поместить проводник, по которому нужно пропустить электрический ток.
- Для этого удобнее всего пользоваться магнитом в форме подковы, а в качестве проводника подойдет медная проволока подключенная концами к батарейке.
- В результате опыта вы увидите, что проволоку вытолкнет из области действия постоянного магнита. Почему это происходит?
- Дело в том, что при прохождении тока через проводник, вокруг последнего создается электромагнитное поле, которое вступает во взаимодействие с уже имеющимся, от постоянного магнита. Как результат этого взаимодействия, мы видим механическое движение проводника.
- Если говорить более подробно, то выглядит это так. Когда круговое поле проводника вступает во взаимодействие с постоянным от магнита, то сила магнитного поля с одной стороны возрастает, а с другой уменьшается, из-за чего провод выталкивает из области действия магнита под углом 90 градусов.
 Как результат этого взаимодействия, мы видим механическое движение проводника.
Как результат этого взаимодействия, мы видим механическое движение проводника.Занимательная физика
- Направление, в котором вытолкнет проводник можно установить по правилу левой руки, которое применимо только к электродвигателям. Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
Эти простые принципы двигателя постоянного тока применяется и поныне. Однако в современных агрегатах вместо постоянных магнитов применяют электрические, а рамки заменяют сложные системы обмоток.
Строение двигателя
Двигатель постоянного тока и устройство
Давайте теперь более подробно разберем, как устроен двигатель постоянного тока, какие в нем имеются детали и как они взаимодействуют друг с другом.
Продолжение теории
Принцип и устройство двигателя постоянного тока
Сконструировать простейший двигатель постоянного тока вы легко сможете своими руками. Инструкция такова, что достаточно соорудить прямоугольную рамку из проводника, способную вращаться вокруг центральной оси.
- Рамка помещается в магнитное поле, после чего на ее концы подается постоянное напряжение, от той же батарейки.
- Так только по рамке начинает течь ток, она приходит в движение, пока не займет горизонтальное положение, называемое нейтральным или «мертвым», когда воздействие поля на проводник равно нулю.
- По идее, рамка должна остановиться, но этого не произойдет, так как она пройдет «мертвую» точку по инерции, а значит, электродвижущие силы снова начнут возрастать. Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.
- Чтобы процесс протекал нормально нужно предусмотреть такую конструкцию подключения рамки к питанию, при которой в момент прохождения тока через нулевую точку будет происходить переключение полюсов, а значит, относительно магнитного поля ток потечет в прежнем направлении.
 Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.
Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.В качестве такого устройства применяется коллектор, состоящий их изолированных пластин, но давайте поговорим о нем чуть позже.
В виде альтернативы можно изготовить такую рамку, что показана на фото выше. Ее отличие в том, что по двум контурам рамки ток протекает в одном направлении, что позволяет избавиться от коллектора, однако такой электромотор крайне неэффективен, из-за постоянно воздействующих тормозящих сил.
Получив вращение ротора, к нему можно приладить привод и дать сопоставимую мощности двигателя нагрузку, получая тем самым работающую модель.
Строение электромотора постоянного тока
Каково устройство электродвигателя постоянного тока
Итак, переходим к строению двигателей:
- Статор или индуктор – неподвижная часть двигателя, представляющая собой деталь, создающую постоянное электромагнитное поле. Состоит статор из сердечника, выполненного из тонколистовой стали (из пластин определенного профиля набирается деталь нужного размера) и обмотки.
Принцип действия и устройство двигателя постоянного тока: статор
- Обмотка укладывается в пазы сердечника определенным образом, формируя основные и добавочные магнитные полюса, естественно, при включении в сеть.
- Обмотка возбуждения находится на главных полюсах, тогда как на добавочных она служит для улучшения коммутации – увеличивает эффективность мотора, его КПД.
Якорь двигателя постоянного тока
- Ротор двигателя, являющийся тут якорем, тоже имеет похожее строение, но отличает его, прежде всего то, то данный узел двигателя является подвижным. Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.
- Витки обмотки якоря изолированы друг от друга и соединяются с контактными пластинами коллектора, через которые и подается питание.
- Все части ротора закреплены на металлическом валу, который является центральной осью вращения двигателя. К нему же и подключается привод, передающий крутящий момент на внешние механизмы.
 Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.
Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.Вид коллектора
- Коллектор (полосатый цилиндр, насаженный на вал) соединен с питающей сетью через щетки, которые выполняются чаще всего из графита. Вообще строение коллектора таково, что контактные пластины также изолированы, что позволяет эффективно менять направление тока в цепи, чтобы избегать торможения двигателя.
- Сами щетки имеют скользящий контакт с пластинами коллектора, и удерживаются в одном положении при помощи щеткодержателей. Поддерживать постоянное напряжение контакта (а ведь мы знаем, что щетки истираются и истончаются) помогают пружины.
Графитовые щетки
- Щетки соединены медными проводами с питающей сетью. Дальше начинается внешняя схема электропитания и управления, о которой мы поговорим немного позже.
Валовый подшипник качения
- Следом за коллектором на валу располагается подшипник качения, обеспечивающий плавное вращение. Сверху он защищен специальным полимерным кольцом, защищающим его от пыли.
Совет! Одной из частых поломок электрических двигателей, является выход из строя подшипника. Если вовремя не заменить этот небольшой элемент конструкции, то запросто можно спалить весь двигатель.
- С обратной стороны обмотки, на том же валу, располагается крыльчатка, поток воздуха от которой эффективно охлаждает двигатель.
- Следом за крыльчаткой обычно крепится привод, отличающийся параметрами, в зависимости от назначения агрегата, в котором двигатель постоянного тока установлен.
В принципе, на этом все. Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Особенности коллекторных двигателей
Перфоратор в разрезе: такие двигатели универсальны и могут работать как от постоянного, так и от переменного тока, но только при соответствующем подключении
Вообще коллекторный двигатель – это действительно хорошее устройство. Такие агрегаты легчайшим образом поддаются регулировке. Повысить, опустить обороты – не проблема. Дать четкий крутящий момент или жесткую механическую характеристику – запросто.
Однако, несмотря на ряд неоспоримых преимуществ, двигатель имеет повышенную сложность сборки, относительно двигателей переменного тока с самовозбуждающимся ротором или других бесколлекторных агрегатов, а также меньшую надежность. И вся загвоздка состоит в этом самом коллекторе.
- Этот узел достаточно дорог, а цена его ремонта иной раз сопоставима с новой деталью, если вообще возможность восстановления имеется.
- Он забивается при работе токопроводящей пылью, что со временем может стать причиной выхода из строя всего двигателя.
- Коллектор искрит, создавая при этом помехи, а при высокой нагрузке так и вовсе может полыхнуть, создавая круговой огонь. В таком случае его закоротит дугой, что несовместимо с жизнью двигателя.
Выше мы уже сказали, что его задача менять направление тока в витках обмотки, а теперь хотим разобрать вопрос подробнее.
Все гениальное просто
- Итак, по сути, данная часть ротора служит выпрямителем тока, то есть переменный ток становится, проходя через него, постоянным, что справедливо для генераторов, или меняет направление тока, если речь идет о двигателях.
- В случае рассмотренного выше примера с вращающейся в магнитном поле рамкой, требовался коллектор, состоящий из двух изолированных полуколец.
- Концы рамки подключаются к разным полукольцам, что не позволяет цепи накоротко замкнуться.
- Как мы помним, коллектор контактирует с щетками, которые установлены таким образом, чтобы они одновременно не контактировали друг с другом и меняли полукольца при прохождении рамкой нулевой точки.

Работа коллектора
Все предельно просто, однако такие двигатели и генераторы не могут быть нормальной мощности в силу конструктива. В результате якорь стали делать с множеством витков, чтобы активные проводники всегда находились максимально близко к полюсам магнита, ведь, вспоминая закон электромагнитной индукции, становится ясно, что именно это положение самое эффективное.
Раз увеличивается количество витков, значит, требуется разбить коллектор на большее число частей, что собственно и является причиной сложности изготовления и дороговизны этого элемента.
Альтернатива коллекторному двигателю
Бесщеточный двигатель постоянного тока
В электронике уже давно царит век полупроводников, что позволяет изготавливать надежные и компактные микросхемы. Так зачем же мы до сих пор пользуемся коллекторными двигателями? А действительно?
- Инженеры тоже не оставили вопрос незамеченным. В результате коллектор сменили силовые ключи, дополнительно в конструкции появились датчики, регистрирующие текущее положение ротора, чтобы система автоматически определяла момент переключения обмотки.
- Как мы помним, нет никакой разницы, двигается ли магнит относительно проводника, либо же это происходит наоборот. Поэтому якорем становится статор, а на роторе располагается постоянный магнит или простейшая обмотка, соединенная с питанием через контактные кольца, который вращать внутри конструкции намного проще.

Контактные кольца в простейшем генераторе переменного тока
- Строение контактных колец чем-то напоминает коллектор, однако они намного надежнее и изготавливать их в условиях производства проще.
В итоге получился новый тип двигателя, а именно бесщеточный двигатель постоянного тока aka BLDC. Устройству доступны те же преимущества, что и коллекторному двигателю, но от надоедливого коллектора мы избавляется.
Однако такие двигатели применяются только в дорогих аппаратах, тогда как простая техника, например соковыжималка или тот же перфоратор будут рентабельнее в производстве, если ставить на них уже классические коллекторные модели двигателей.
Управление двигателем постоянного тока
Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Совет! Если сделать одновременно обе эти манипуляции, то с двигателем ничего не произойдет, и он продолжит вращаться в том же направлении, что и ранее.
Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.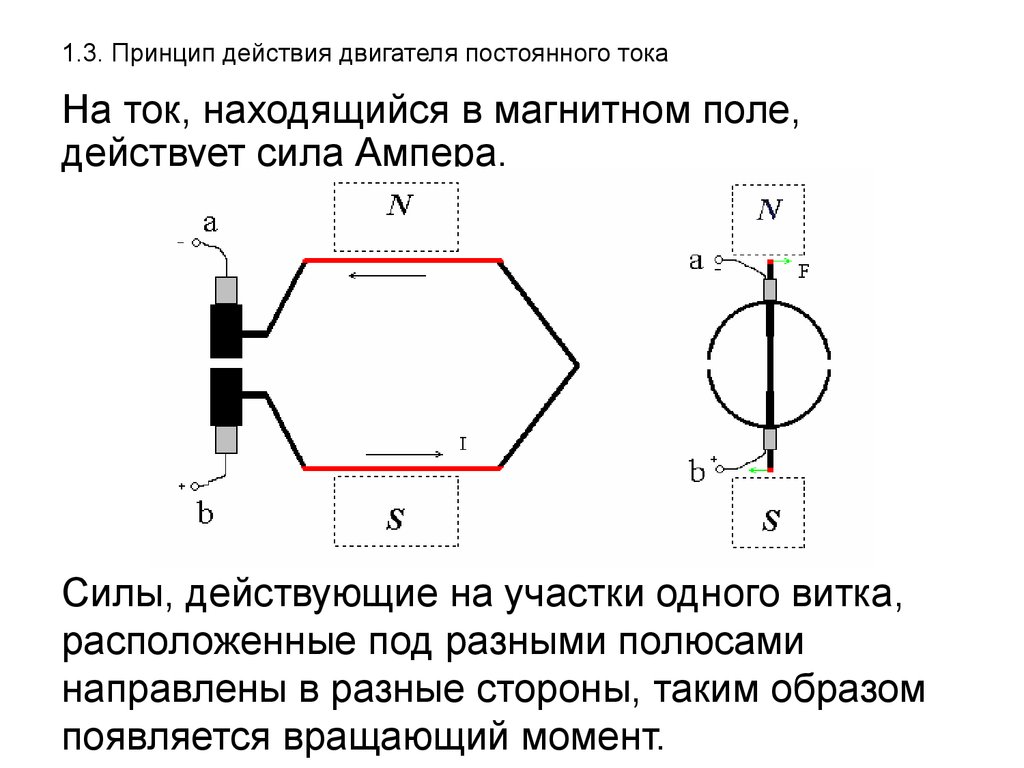
Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.
- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.
Схемы управления двигателем на базе интегральной микросхемы LM317
- Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.

Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.
- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.
Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная. Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Двигатели постоянного тока назначение конструкция принцип работы
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита.
На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока.
Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины.
 Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество.
Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество.То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов.
С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.

Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение.
Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера.
В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
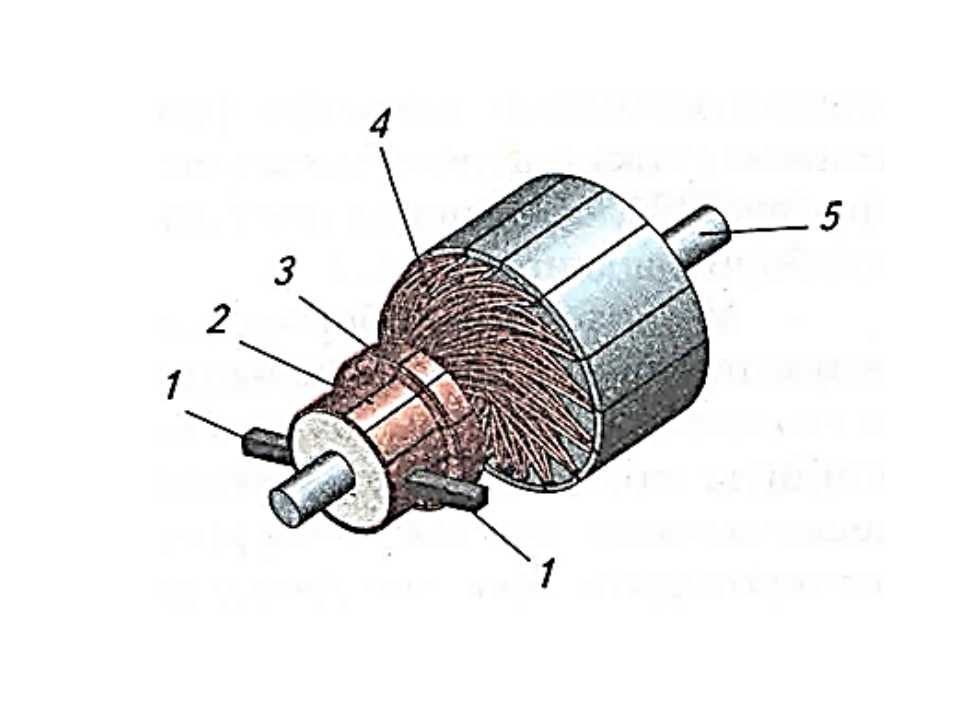
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока.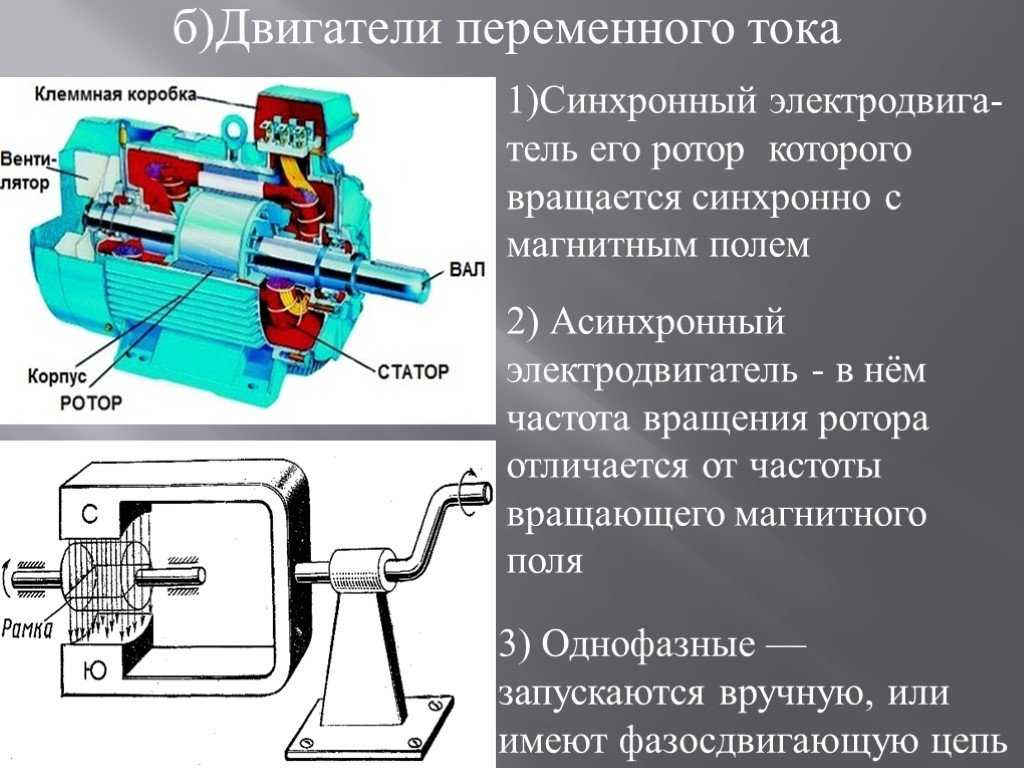 Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.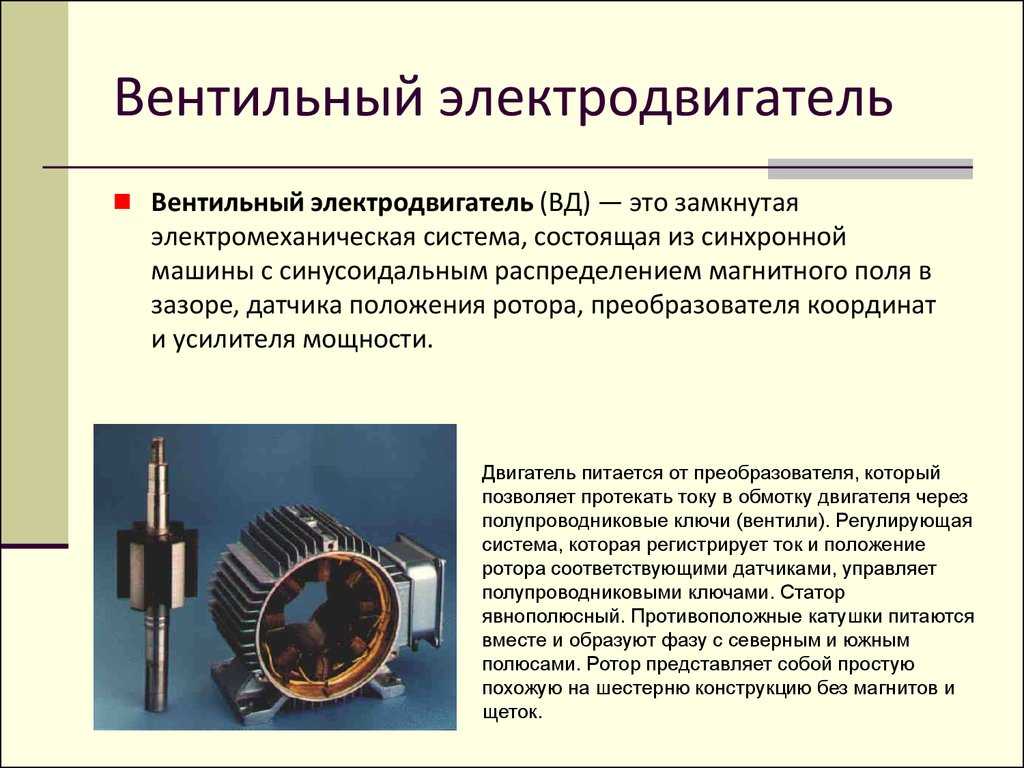
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения.
В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения.
Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.

Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.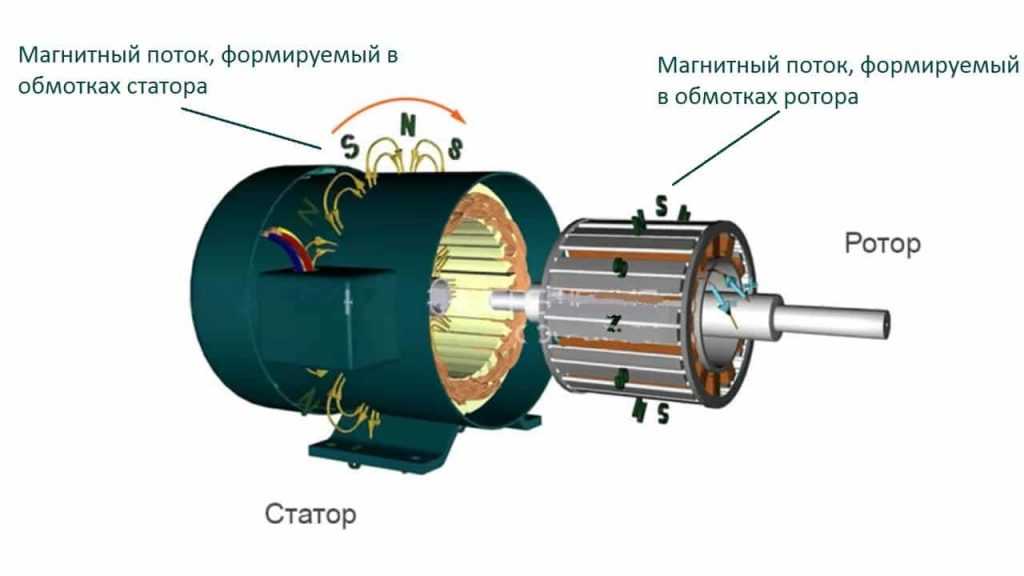
Видео в дополнение к написанному
Двигатель постоянного тока: устройство и принцип действия, конструкция и управление, применение дпт
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.
История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока.
Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор.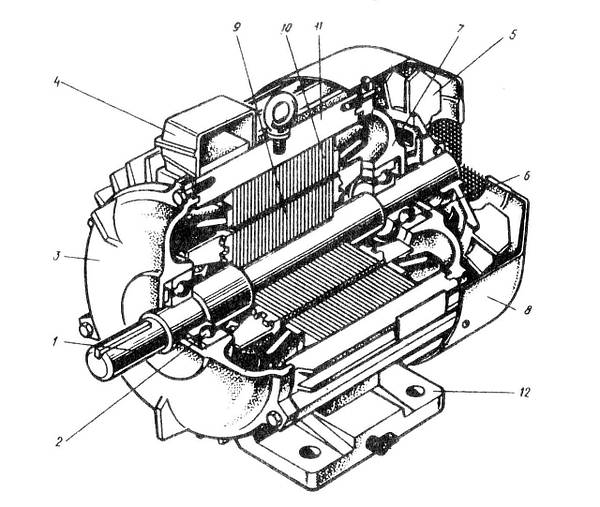 Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором.
Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором.
Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
В последующие десятилетия такие машины из-за развития трехфазного переменного тока потеряли свою значимость в крупномасштабном машиностроении. Синхронные машины и системы с низким уровнем обслуживания асинхронного двигателя заменили их во многих устройствах.
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.
Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
 Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).Обе конструкции называются двигателями постоянного тока с внешним возбуждением.
Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу [F], зависящую от тока [I] и напряжённости магнитного поля [B]. Токопроводящий проводник окружен круговым магнитным полем.
Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.
Обмотка якоря состоит из двух половин катушки. Если применить напряжение постоянного тока к двум концам обмотки якоря, можно представить, что движущиеся носители заряда поступают в нижнюю половину катушки из верхней половины катушки.
Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки.
Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора).
Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество.
Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Принцип действия и использование
Это устройство представляет собой электромашину, которая преобразовывает электрическую энергию в механическую. Принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник, переносимый током, помещается в магнитное поле, он испытывает механическую силу.
Коммутатор состоит из проводящих сегментов (стержней) из меди, которые представляют собой завершение отдельных катушек проволоки, распределённых вокруг арматуры. Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя.
По мере прохождения электрической энергии через щётки и арматуру создаётся крутильная сила в виде реакции между полем двигателя и якорем, вызывающим поворот якоря двигателя. Когда арматура поворачивается, щётки переключаются на соседние полосы на коммутаторе. Это действие переносит электрическую энергию на соседнюю обмотку и якорь.
Движение магнитного поля достигается переключением тока между катушками внутри двигателя.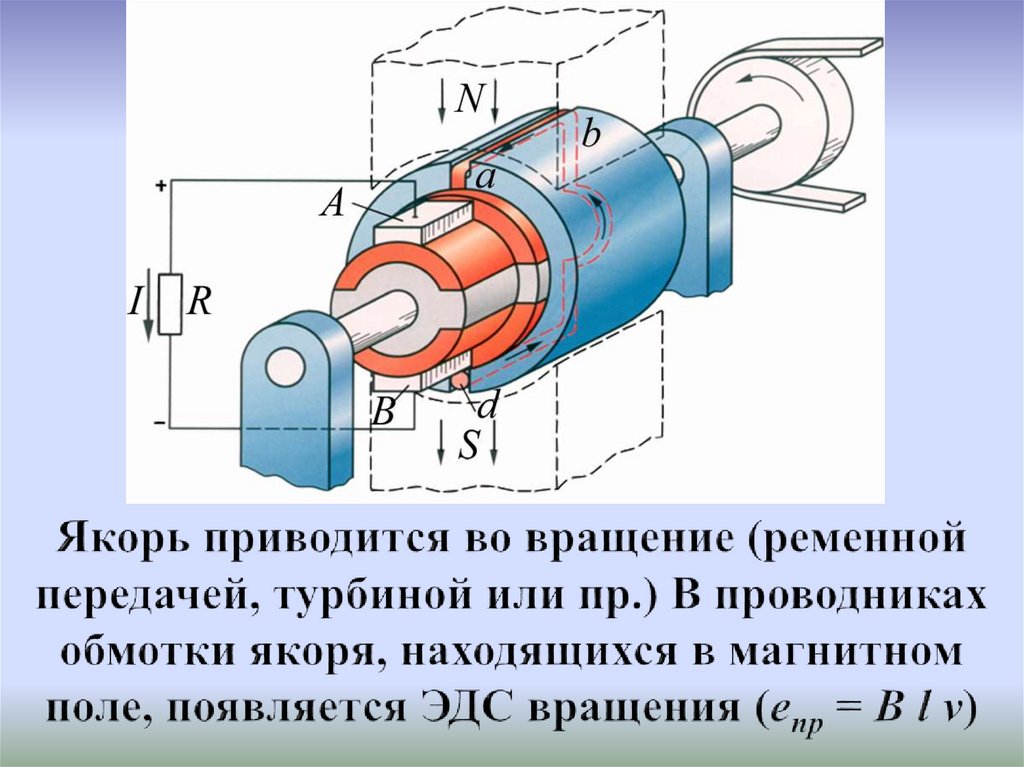 Это действие называется коммутацией. Очень многие двигатели имеют встроенную коммутацию. Это означает, что при вращении двигателя механические щётки автоматически коммутируют катушки на роторе.
Это действие называется коммутацией. Очень многие двигатели имеют встроенную коммутацию. Это означает, что при вращении двигателя механические щётки автоматически коммутируют катушки на роторе.
Настройка скорости
ДПТ можно легко регулировать. Скорость можно изменить с помощью следующих переменных:
- Напряжение якоря U_A (управление напряжением).
- Основной поток поля (полевое управление), сила магнитного поля.
- Анкерное сопротивление.
Простейшим методом управления скоростью вращения является управление приводным напряжением. Чем выше напряжение, тем выше скорость, которую двигатель пытается достичь. Во многих приложениях простое регулирование напряжения может привести к большим потерям мощности в цепи управления, поэтому широко используется метод широтно-импульсной модуляции.
В основном способе с широтно-импульсной модуляцией рабочая мощность включается и выключается для модуляции тока. Отношение времени включения к «выключенному» времени определяет скорость двигателя.
Электродвигатель с внешним возбуждением легко контролировать, поскольку токи через обмотки якоря и статора можно контролировать отдельно. Поэтому такие двигатели имели определённое значение, особенно в области высоко динамичных приводных систем, например, для привода станков с точной регулировкой скорости и крутящего момента.
Современное применение
ДПТ используются в различных областях.
Он является важным элементом в различных продуктах:
- игрушках;
- сервомеханических устройствах;
- приводах клапанов;
- роботах;
- автомобильной электронике.
Высококачественные предметы повседневного назначения (кухонные приборы) используют серводвигатель, известный как универсальный двигатель. Эти универсальные двигатели являются типичными ДПТ, в которых стационарные и вращающиеся катушки представляют собой последовательные провода.
Назначение и принцип действия машины постоянного тока
Назначение. Машины постоянного тока применяют в качестве электродвигателей и генераторов. Электродвигатели постоянного тока имеют хорошие регулировочные свойства, значительную перегрузочную способность и позволяют получать как жесткие, так и мягкие механические характеристики.
Машины постоянного тока применяют в качестве электродвигателей и генераторов. Электродвигатели постоянного тока имеют хорошие регулировочные свойства, значительную перегрузочную способность и позволяют получать как жесткие, так и мягкие механические характеристики.
Поэтому их широко используют для привода различных механизмов в черной металлургии (прокатные станы, кантователи, роликовые транспортеры), на транспорте (электровозы, тепловозы, электропоезда, электромобили), в грузоподъемных и землеройных устройствах (краны, шахтные подъемники, экскаваторы), на морских и речных судах, в металлообрабатывающей, бумажной, текстильной, полиграфической промышленности и др. Двигатели небольшой мощности применяют во многих системах автоматики.
Конструкция двигателей постоянного тока сложнее и их стоимость выше, чем асинхронных двигателей. Однако в связи с широким применением автоматизированного электропривода и тиристорных преобразователей, позволяющих питать электродвигатели постоянного тока регулируемым напряжением от сети переменного тока, эти электродвигатели широко используют в различных отраслях народного хозяйства.
Генераторы постоянного тока ранее широко использовались для питания электродвигателей постоянного тока в стационарных и передвижных установках, а также как источники Электрической энергии для заряда аккумуляторных батарей, питания электролизных и гальванических ванн, для электроснабжения различных электрических потребителей на автомобилях, самолетах, пассажирских вагонах, электровозах, тепловозах и др.
Недостатком машин постоянного тока является наличие щеточноколлекторного аппарата, который требует тщательного ухода в эксплуатации и снижает надежность работы машины.
Поэтому в последнее время генераторы постоянного тока в стационарных установках вытесняются полупроводниковыми преобразователями, а на транспорте — синхронными генераторами, работающими совместно с полупроводниковыми выпрямителями.
Принципиальная возможность создания электродвигателя постоянного тока была впервые показана М. Фарадеем в 1821 г.; в созданном им приборе проводник, по которому пропускали постоянный ток, вращался вокруг магнита.
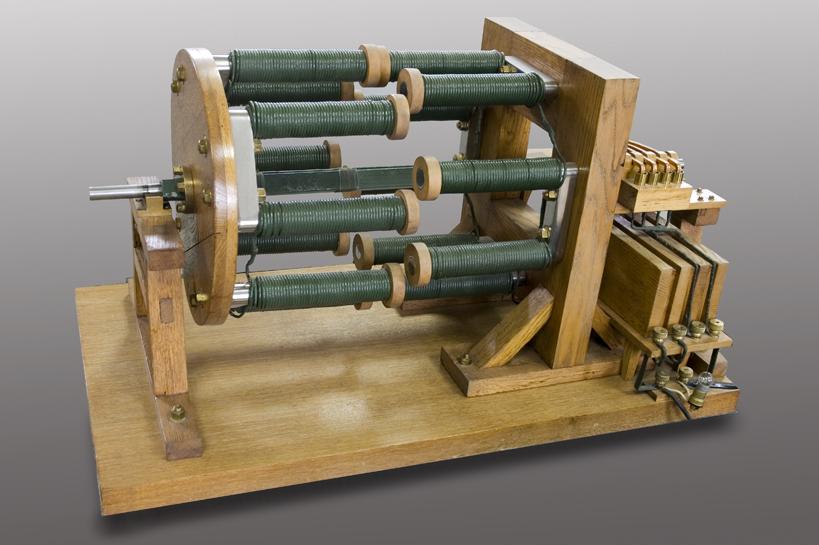
Двигатель постоянного тока с электромагнитным возбуждением был создан в России акад. Б. С. Якоби в 1834 г., который назвал его магнитной машиной. В 1838 г. им был построен более мощный электродвигатель, который использовался для привода гребного винта речного катера.
Принцип обратимости электрических машин был также впервые сформулирован русским физиком акад. Э. X. Ленцем. В дальнейшем ряд коллекторных машин постоянного тока был созданГ. Феррарисом, В. Сименсом и др.
Значительное развитие теория электрических машин постоянного тока получила в трудах Д. А. Лачинова. В 1880 г.
он опубликовал труд «Электромеханическая работа», в котором рассмотрел вопросы, создания вращающего момента электродвигателя, КПД электрических машин, условия питания электродвигателя от генератора и дал классификацию машин постоянного тока по способу возбуждения.
В XX столетии продолжалось развитие теории и совершенствование конструкции машин постоянного тока. Большое внимание обращалось на повышение надежности этих машин путем устранения причин, вызывающих возникновения искрения под щетками (улучшения коммутации) и образования кругового огня на коллекторе.
Большое внимание обращалось на повышение надежности этих машин путем устранения причин, вызывающих возникновения искрения под щетками (улучшения коммутации) и образования кругового огня на коллекторе.
Важное значение в решении всех теоретических и практических вопросов работы машин постоянного тока имели в трудах советских ученых: А. Е. Алексеева, Д. А. Завалишина, Г. А. Люста, А. Б. Иоффе, В.
Т. Касьянова, М. П. Костенко, В. С. Кулебакина, С. И. Курбатова, Л. М. Пиотровского, Е. М. Синельникова, В. А. Толвинского, К. И. Шенфера, венгер-ского электротехника О. В. Бенедикта и др.
В настоящее время в рамках Интерэлектро разработана серия электродвигателей постоянного тока типа ПИ мощностью от 0,25 до 750 кВт, которая выпускается электропромышленностью всех стран — членов СЭВ.
Эти двигатели Предназначены для регулируемых электроприводов и рассчитаны на питание от полупроводниковых преобразователей.
Кроме того, электропромышленность выпускает ряд двигателей постоянного тока специального исполнения — для электротяги, экскаваторов, металлургического оборудования, шахтных подъемников, буровых установок, морских и речных судов и других приводов мощностью от нескольких сотен до нескольких тысяч кВт.
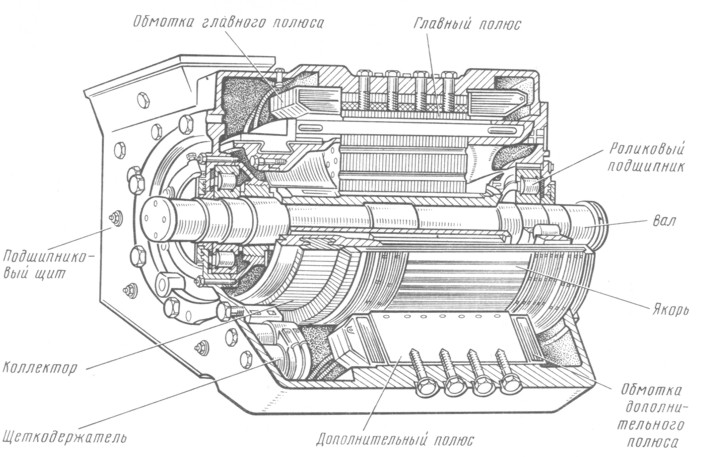
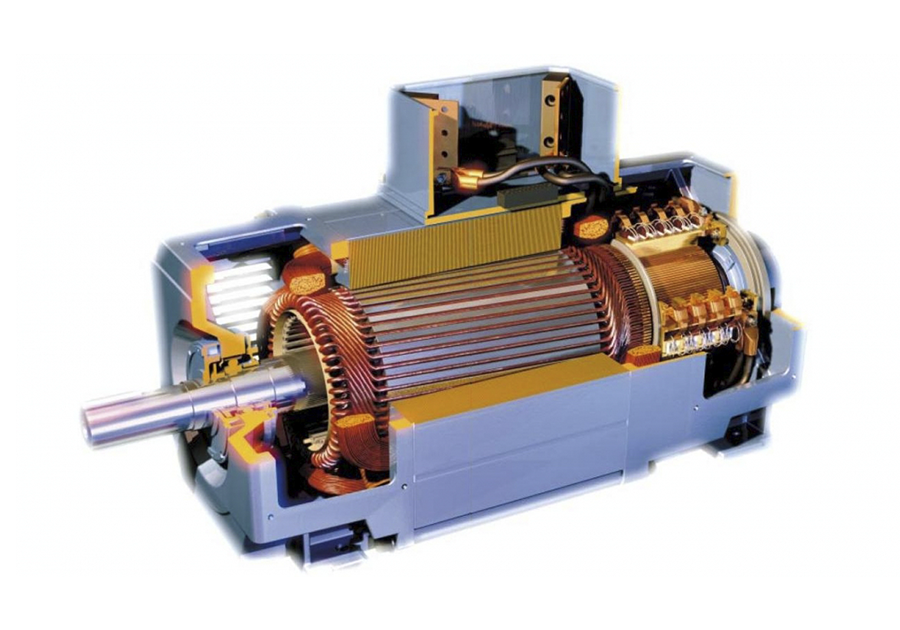
| Рис. 8.1. Электромагнитная схема двухполюсной машины постоянного тока (а) и эквивалентная схема ее обмотки якоря (б): 1 — обмотка возбуждения; 2 — главные полюсы; 3 — якорь; 4 — обмотка якоря; 5 — щетки; 6 — корпус (станина) |
Принцип действия. Машина постоянного тока (рис. 8.1, а) имеет обмотку возбуждения, расположенную на явно выраженных полюсах статора.
По этой обмотке проходит постоянный ток Iв , который создает магнитное поле возбуждения Фв . На роторе расположена двухслойная обмотка, в которой при вращении ротора индуцируется ЭДС.
Таким образом, ротор машины постоянного тока является якорем, а конструкция машины сходна с конструкцией обращенной синхронной машины.
При заданном направлении вращения якоря направление ЭДС, индуцируемой в его проводниках, зависит только от того, под каким полюсом находится проводник. Поэтому во всех проводниках, расположенных под одним полюсом, направление ЭДС одинаковое и сохраняется таким независимо от частоты вращения.
Иными словами, характер, отображающий направление ЭДС на рис. 8.
1, а, неподвижен во времени: в проводниках, расположенных выше горизонтальной оси симметрии, которая разделяет полюсы (геометрическая нейтраль), ЭДС всегда направлена в одну сторону; в проводниках, лежащих ниже геометрической нейтрали, ЭДС направлена в противоположную сторону.
При вращении якоря проводники обмотки перемещаются от одного полюса к другому; ЭДС, индуцируемая в них, изменяет знак, т. е. в каждом проводнике наводится переменная ЭДС. Однако количество проводников, находящихся под каждым полюсом, остается неизменным.
При этом суммарная ЭДС, индуцируемая в проводниках, находящихся под одним полюсом, также неизменна по направлению и приблизительно постоянна по величине.
Эта ЭДС снимается с обмотки якоря с помощью скользящего контакта, включенного между обмоткой и внешней цепью.
Обмотка якоря выполняется замкнутой, симметричной (рис. 8.1,б). При отсутствии внешней нагрузки ток по обмотке не проходит, так как ЭДС, индуцируемые в различных частях обмотки, взаимно компенсируются.

Если щетки, осуществляющие скользящий контакт с обмоткой якоря, расположить на геометрической нейтрали, то при отсутствии внешней нагрузки к щеткам прикладывается напряжение U, равное ЭДС Е, индуцированной в каждой из половин обмоток. Это напряжение практически неизменно, хотя и имеет некоторую переменную составляющую, обусловленную изменением положения проводников в пространстве. При большом количестве проводников пульсации напряжения весьма незначительны.
При подключении к щеткам сопротивления нагрузки Rн через обмотку якоря проходит постоянный ток Iа , направление которого определяется направлением ЭДС Е. В обмотке якоря ток Iа разветвляется и проходит по двум параллельным ветвям (токи ia ).
Для обеспечения надежного токосъема щетки скользят не по проводникам обмотки якоря (как это было вначале развития электромашиностроения), а по коллектору, выполняемому в виде цилиндра, который набирается из медных пластин, изолированных одна от другой. К каждой паре соседних коллекторных пластин присоединяют часть обмотки якоря, состоящую из одного или нескольких витков; эту часть называют секцией обмотки якоря.
К каждой паре соседних коллекторных пластин присоединяют часть обмотки якоря, состоящую из одного или нескольких витков; эту часть называют секцией обмотки якоря.
Если машина работает в генераторном режиме, то коллектор вместе со скользящими по его поверхности щетками является выпрямителем.
В двигательном режиме, когда к якорю подводится питание от источника постоянного тока и он преобразует электрическую энергию в механическую, коллектор со щетками можно рассматривать как преобразователь частоты, связывающий сеть постоянного тока с обмоткой, по проводникам которой проходит переменный ток.
Таким образом, главной особенностью машины постоянного тока является наличие коллектора и скользящего контакта между обмоткой якоря и внешней электрической цепью.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока.
В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование.
Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения.
Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря.
На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться.
Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками.
В современной конструкции мотора роль рамки играет якорь с обмотками.
На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему.
В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя.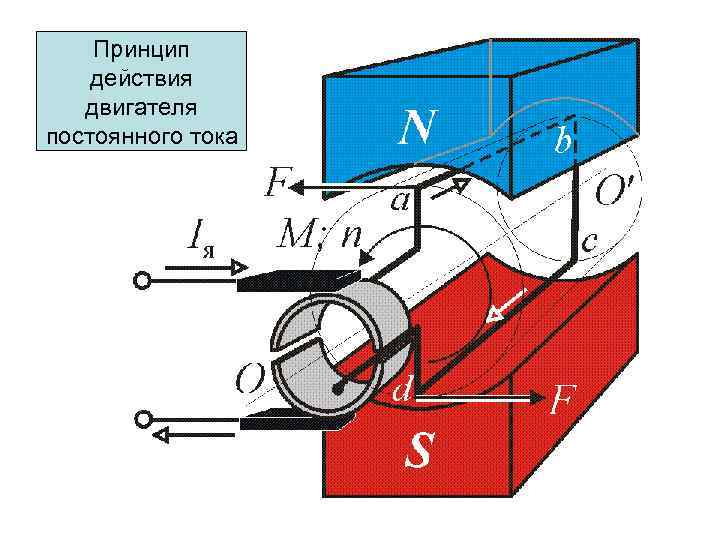 Эту пыль необходимо периодически удалять.
Эту пыль необходимо периодически удалять.
Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа.
В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор.
После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах.
При этом параметры двигателя аналогичны двигателю на постоянных магнитах.
Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения.
При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя.
Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора.
В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
Недостатки
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.

Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
устройство и принцип действия, конструкция и управление, применение дпт
Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.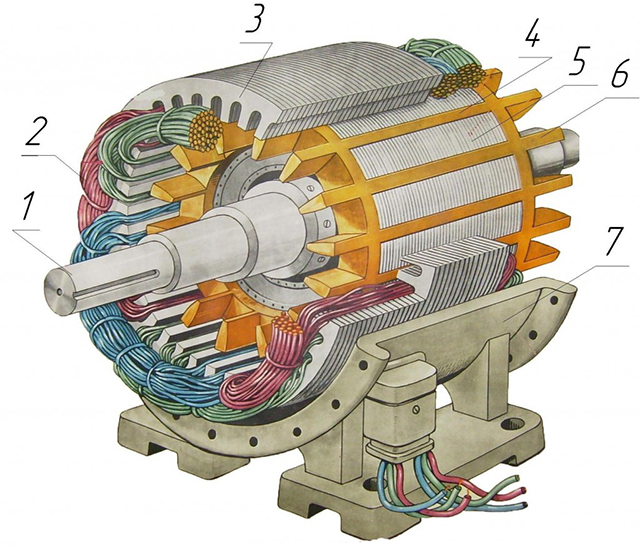
- Особенности и устройство ДПТ
- История изобретения
- Конструкция двигателя
- Принцип действия и использование
- Настройка скорости
- Современное применение
Особенности и устройство ДПТ
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.
История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока.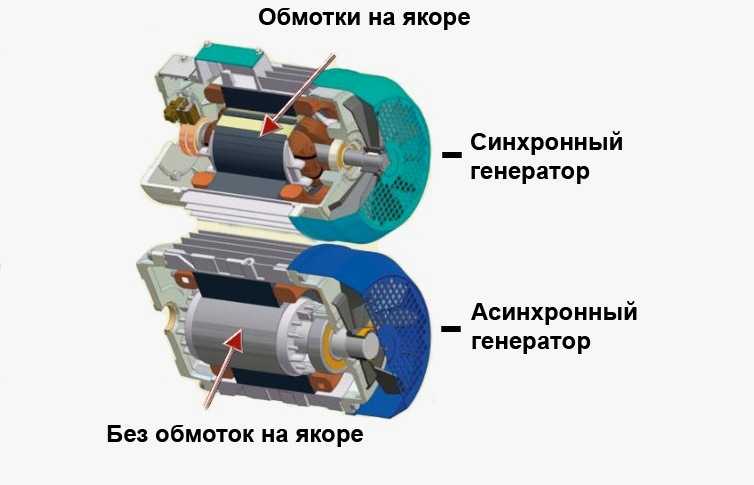 Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
В последующие десятилетия такие машины из-за развития трехфазного переменного тока потеряли свою значимость в крупномасштабном машиностроении. Синхронные машины и системы с низким уровнем обслуживания асинхронного двигателя заменили их во многих устройствах.
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.
Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
Обе конструкции называются двигателями постоянного тока с внешним возбуждением. Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу [F], зависящую от тока [I] и напряжённости магнитного поля [B]. Токопроводящий проводник окружен круговым магнитным полем. Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.
Обмотка якоря состоит из двух половин катушки. Если применить напряжение постоянного тока к двум концам обмотки якоря, можно представить, что движущиеся носители заряда поступают в нижнюю половину катушки из верхней половины катушки.

Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки. Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора). Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество. Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Принцип действия и использование
Это устройство представляет собой электромашину, которая преобразовывает электрическую энергию в механическую. Принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник, переносимый током, помещается в магнитное поле, он испытывает механическую силу.
Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Коммутатор состоит из проводящих сегментов (стержней) из меди, которые представляют собой завершение отдельных катушек проволоки, распределённых вокруг арматуры. Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя.
Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя.
По мере прохождения электрической энергии через щётки и арматуру создаётся крутильная сила в виде реакции между полем двигателя и якорем, вызывающим поворот якоря двигателя. Когда арматура поворачивается, щётки переключаются на соседние полосы на коммутаторе. Это действие переносит электрическую энергию на соседнюю обмотку и якорь.
Движение магнитного поля достигается переключением тока между катушками внутри двигателя. Это действие называется коммутацией. Очень многие двигатели имеют встроенную коммутацию. Это означает, что при вращении двигателя механические щётки автоматически коммутируют катушки на роторе.
Настройка скорости
ДПТ можно легко регулировать. Скорость можно изменить с помощью следующих переменных:
- Напряжение якоря U_A (управление напряжением).
- Основной поток поля (полевое управление), сила магнитного поля.
- Анкерное сопротивление.

Простейшим методом управления скоростью вращения является управление приводным напряжением. Чем выше напряжение, тем выше скорость, которую двигатель пытается достичь. Во многих приложениях простое регулирование напряжения может привести к большим потерям мощности в цепи управления, поэтому широко используется метод широтно-импульсной модуляции.
В основном способе с широтно-импульсной модуляцией рабочая мощность включается и выключается для модуляции тока. Отношение времени включения к «выключенному» времени определяет скорость двигателя.
Электродвигатель с внешним возбуждением легко контролировать, поскольку токи через обмотки якоря и статора можно контролировать отдельно. Поэтому такие двигатели имели определённое значение, особенно в области высоко динамичных приводных систем, например, для привода станков с точной регулировкой скорости и крутящего момента.
Современное применение
ДПТ используются в различных областях.
Он является важным элементом в различных продуктах:
- игрушках;
- сервомеханических устройствах;
- приводах клапанов;
- роботах;
- автомобильной электронике.
Высококачественные предметы повседневного назначения (кухонные приборы) используют серводвигатель, известный как универсальный двигатель. Эти универсальные двигатели являются типичными ДПТ, в которых стационарные и вращающиеся катушки представляют собой последовательные провода.
Как устроен и принцип действия двигателя постоянного тока (видео)
Подавляющее большинство электроприводов нашего времени использует энергию переменного тока в асинхронном режиме. Тем не менее, двигатель постоянного тока, устройство и принцип действия которого будут рассматривать в этой статье, востребован ничуть не меньше. Что он собой представляет, какие существуют теоретические и технические особенности его эксплуатации, постараемся разобраться далее.
Что он собой представляет, какие существуют теоретические и технические особенности его эксплуатации, постараемся разобраться далее.
Что такое постоянный ток и чем он отличается от переменного?
Начать рассмотрение вопроса работы эл. двигателей необходимо с того, на чем она базируется, то есть с определения понятия «электрический ток» и его основных видов. Еще со школы нам должно быть известно, что в физике электрическим током называют направленное движение заряженных частиц (электронов или ионов). Его разделение на постоянный и переменный происходит в зависимости от величины и направления тока в некотором промежутке времени. Это хорошо видно на следующем графике:
Как видим, график (красная линия) не меняется по времени, напряжение остается стабильным. В то же время, переменный ток (зеленый график) имеет форму синусоиды, постоянно меняя свое значение и направление со временем. Периодичность, с которой график проходит через одинаковые точки по ординате называется частотой и ее стандартное значение 50 Гц.
На самом деле, практически любой бытовой прибор, электроинструмент использует постоянный ток, который преобразовывается из переменного (сетевого). Может возникнуть закономерный вопрос, а для чего тогда использовать синусоидальный ток? Дело в том, что такая форма задания тока позволяет легко преобразовывать напряжение, идущее от генератора электростанции с 200-300 тысяч Вольт до привычных 220, с учетом коэффициента эффективности.
Принцип действия электродвигателя
Работа любого эл. двигателя пост. тока базируется на принципе взаимного действия магнитных полей статора и ротора. Здесь также нужно вспомнить базовую физику и историю с рамкой, вращающейся в однородном магнитном поле. Задание предполагает подачу на нее тока, индуцирующего собственное круговое магнитное поле. При взаимодействии с предыдущим формирует направленную перпендикулярно силу Ампера. Она выталкивает рамку из однородного поля.
В нашем случае, принцип действия тот же, но роль неподвижного однородного магнитного поля играет статор, а рамки – вращающийся ротор электродвигателя, обмотками, который еще называется якорем.
Как видим, два полюса статора создают однородное магнитное поле. Обмотка ротора состоит из двух частей, которые наматываются на его полюсах и соединены между собой последовательно. Концы обмоток замыкаются на разделенных, расположенных на валу электродвигателя коллекторных пластинах. Они имеют физический контакт (трение) с неподвижными щетками из графита, на которые подается пост. ток. Если при подключении соблюсти принцип расположение полюсов тока, как показано на рисунке, то полюс якоря, расположенный на схеме слева, станет условно северным, как и находящийся в непосредственной близости полюс статора электродвигателя.
Естественная реакция на действие магнитных сил заключается в том, что равнозначные полюса отталкиваются. В нашем случае такое возможно только за счет вращения. По инерции, северный полюс якоря, провернувшись на 180º станет напротив южного полюса статора. По логике вещей они должны начать притягиваться, что приведет к торможению. Чтобы этого не допустить, в момент перехода нейтральной линии коллектор переключает обмотки якоря местами, чтобы вновь организовать отторжение полюсов.
По логике вещей они должны начать притягиваться, что приведет к торможению. Чтобы этого не допустить, в момент перехода нейтральной линии коллектор переключает обмотки якоря местами, чтобы вновь организовать отторжение полюсов.
Учитывая эту информацию устройство двигателя постоянного тока можно изобразить следующим образом:
Характеристики эл. двигателя
Любой электродвигатель – это оборудование, которым можно и нужно управлять в зависимости от требуемых условий. Регулирование происходит одним из трех основных способов/принципов:
- Изменение напряжения, которое подается на обмотки ротора,
- Ввод в цепь дополнительного сопротивления,
- Изменения возбуждения (величины потока).
Работа эл. двигателя оценивается по графикам характеристик, которые бывают:
- Механическими. Представляют собой зависимость частоты/скорости вращения от момента на валу с учетом поправочного коэффициента,
- Регулировочными. Зависимость частоты вращения от напряжения в цепи питания обмоток якоря, сопротивления или потока.
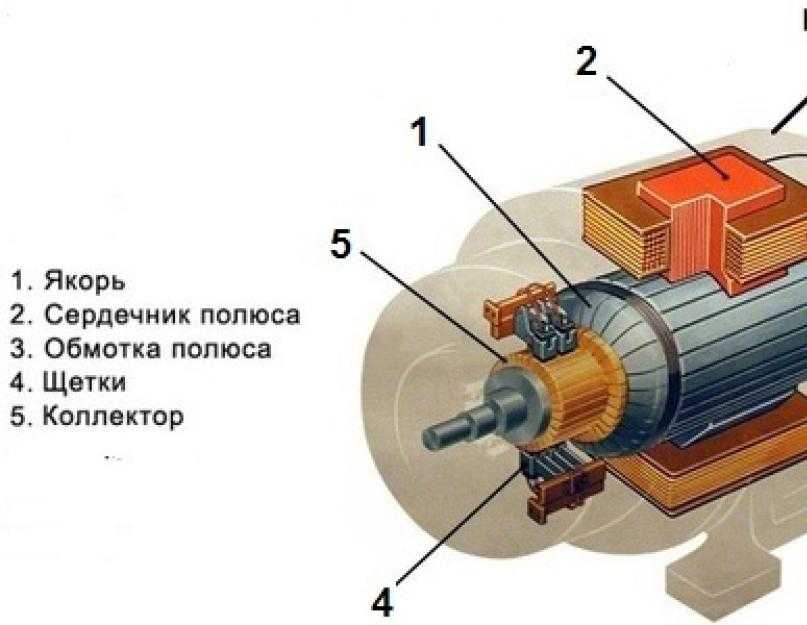
На графике механической характеристики откладываются значения частоты вращения (ось ординат) и момента (ось абсцисс). По форме она представляет прямую с отрицательным уклоном. Построение графика происходит для определенной величины напряжения. Базовым уравнением механической характеристики является:
где ω – скорость вращения якоря, U – напряжение якорной цепи, К – конструктивный коэффициент, Ф – значение потока, RЯ – активное сопротивление якорной обмотки, М – электромагнитный момент электродвигателя.
В отличие от нее, график регулировочной характеристики строится для определенного момента на валу (ось абсцисс). На оси ординат по-прежнему находится частота. Для каждого из видов регулирования электродвигателя, уравнение будет иметь отдельную форму:
- Уравнение при регулировании напряжением:
- Уравнение при реостатном регулировании (сопротивлением):
- Уравнение при потоковом регулировании:
Сравнительный вид графиков представлен ниже:
Также следует напомнить, что механические характеристики могут быть естественными (снятые при номинальном режиме) или искусственными (получаются при изменении напряжения, сопротивления или потока).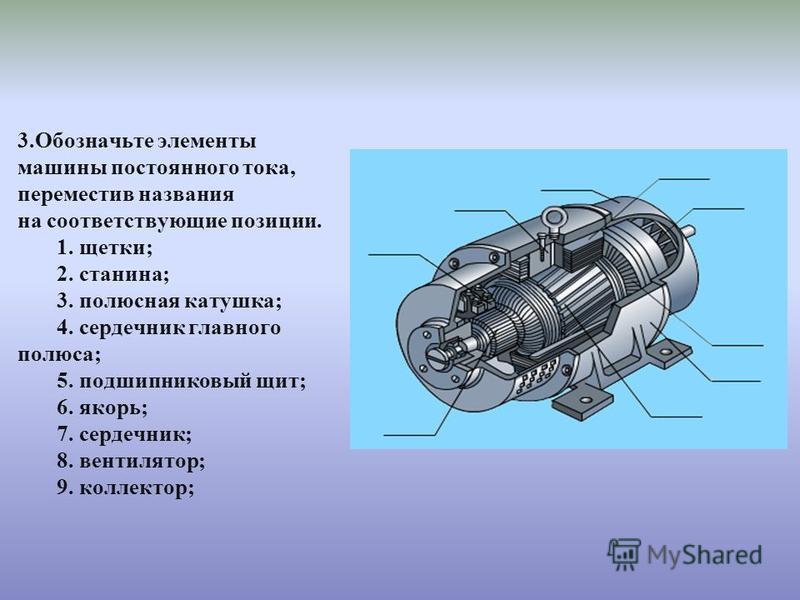
Режимы работы эл. двигателей
Используя уже известный нам график для характеристик, но расширив его на четыре квадранта, можно оценить существующие режимы работы оборудования.
Нумерация квадрантов происходит против часовой стрелки, начиная с правого верхнего, в котором координаты по обеим осям идут со знаком «+». Как видно из графика, в первом и третьем квадрантах наблюдается двигательный режим, для которого мощность Р = М·ω >, 0. В двух других квадрантах реализуется режим генератора или тормозной, имеющий отрицательное значение мощности.
Как видим, график образует несколько характерных точек и зон, ответственных за отдельные режимы:
- Холостой ход. Образуется в точке ωо. В этом случае ток и момент равны нулю, а сам эл. двигатель не получает энергии,
- Генератор при параллельном подключении. Называется еще тормозным с рекуперацией в сеть. Реализуется при ω >, ωо и E >, U. Эл. двигатель получает механическую энергию от работающего оборудования, а в сеть взамен отдается электрическая (генератор тока),
- Короткое замыкание. В этом случае ω = 0 и Е = 0. Механическая энергия от вращения вала не отдается, а электрическая превращается в тепловую,
- Генератор при последовательном соединении. Этот режим еще называется торможением с противовключением. При этом ω <, 0, а ток и ЭДС имеют одинаковое направление. Выработка электричества происходит за счет вращения оборудования, совмещенного с валом ротора,
- Автономный генератор. Режим динамического торможения предполагает выработку электричества за счет одной лишь механической энергии вращения вала от привода, без участия сети.
 Реализуется при ω >, ωо и E >, U. Эл. двигатель получает механическую энергию от работающего оборудования, а в сеть взамен отдается электрическая (генератор тока),
Реализуется при ω >, ωо и E >, U. Эл. двигатель получает механическую энергию от работающего оборудования, а в сеть взамен отдается электрическая (генератор тока),Технические и энергетические параметры функционирования двигателей постоянного тока позволяют с большой эффективностью использовать их в разных сферах, от машиностроения до легкой промышленности и даже игрушек. Они могут действовать в чисто двигательном или режиме генератора (тормозном), используя различные коэффициенты.
Принцип действия электродвигателя постоянного тока
|
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Как работает двигатель постоянного тока Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Принцип действия современных электродвигателей Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока
Свежие записи:
|
 Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.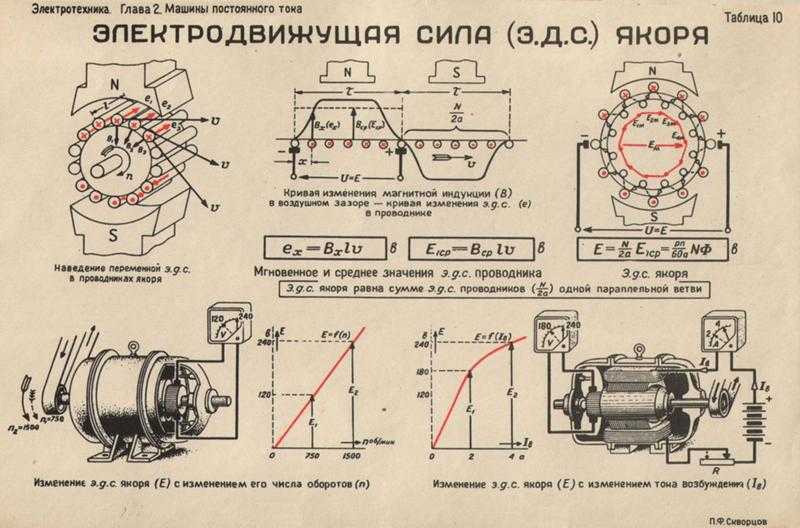 В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
 А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.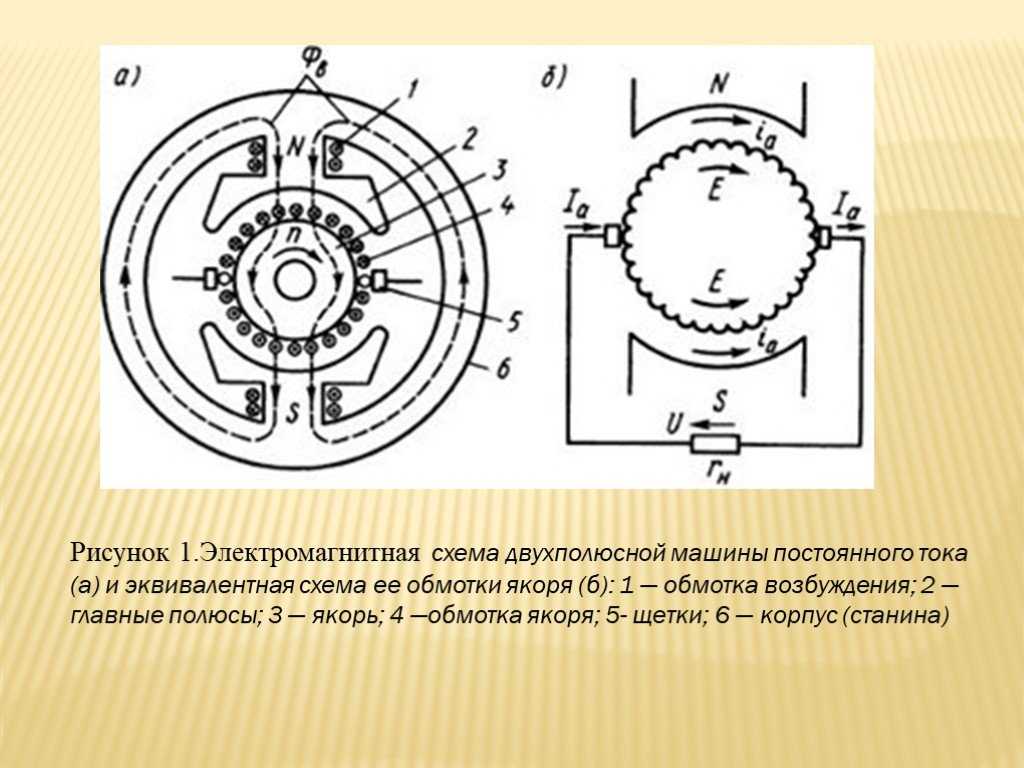
Конструкция бесщеточного двигателя постоянного тока | Portescap
Бесщеточные двигатели постоянного тока (BLDC) обеспечивают высокий КПД, крутящий момент и скорость, а их размеры подходят для широкого спектра применений. Portescap продолжает улучшать характеристики своих щелевых и щелевых бесколлекторных двигателей постоянного тока. При поиске подходящего двигателя для вашего применения у вас может возникнуть много вопросов. Как работает бесщеточный двигатель и в чем разница между бесщеточным и щеточным двигателем? Каких преимуществ можно достичь с помощью конструкции двигателя BLDC, каковы преимущества бесщеточных двигателей в целом и бесщеточных двигателей Portescap в частности? Узнайте больше о преимуществах двигателей Portescap BLDC для вашего бизнеса.
При поиске подходящего двигателя для вашего применения у вас может возникнуть много вопросов. Как работает бесщеточный двигатель и в чем разница между бесщеточным и щеточным двигателем? Каких преимуществ можно достичь с помощью конструкции двигателя BLDC, каковы преимущества бесщеточных двигателей в целом и бесщеточных двигателей Portescap в частности? Узнайте больше о преимуществах двигателей Portescap BLDC для вашего бизнеса.
КАК РАБОТАЕТ БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА?
В обычных двигателях постоянного тока используется стационарный магнит с вращающимся якорем, объединяющим сегменты коммутации и щетки для обеспечения автоматической коммутации. Для сравнения, бесщеточный двигатель постоянного тока имеет обратную конструкцию: постоянный магнит вращается, тогда как обмотки являются частью статора и могут получать питание без использования системы коллектора и щетки. Коммутация бесщеточного двигателя постоянного тока осуществляется электронным способом и может выполняться либо по противо-ЭДС двигателя, либо с помощью датчика положения.
Схема бесщеточного двигателя постоянного тока
В ЧЕМ РАЗНИЦА МЕЖДУ БЕСЩЕТОЧНЫМ И ЩЕТОЧНЫМ ДВИГАТЕЛЯМИ?
Бесщеточные двигатели не имеют механической коммутации. В щеточных двигателях более традиционной конструкции используется механическая коммутация, при которой для электрических соединений используются вращающиеся якоря со щетками. Уменьшение количества движущихся частей обеспечивает долгий срок службы бесщеточных двигателей, ограниченный только износом шарикоподшипников.
КОНСТРУКЦИЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
На этапе проектирования бесщеточного двигателя постоянного тока инженеры Portescap стремятся оптимизировать крутящий момент бесщеточного двигателя. Крутящий момент двигателя — это количество вращательного усилия, которое двигатель создает во время работы. Ключевыми компонентами, участвующими в создании крутящего момента, являются магнит, обмотка и путь магнитного потока. Чем больше количество пар полюсов в магните, тем больше крутящий момент бесщеточного двигателя при той же рассеиваемой мощности. Медь, содержащаяся в обмотке, вносит свой вклад в мощность, обеспечиваемую двигателем, в то время как путь потока направляет все магнитное поле в полезный канал, сводя к минимуму потери. Соблюдение правильного баланса важно при создании двигателя с максимальным крутящим моментом бесщеточного двигателя, который не потребляет огромной мощности. Понимание полной конструкции двигателя позволяет инженерам Portescap упаковать максимально возможную мощность в самый компактный двигатель.
Медь, содержащаяся в обмотке, вносит свой вклад в мощность, обеспечиваемую двигателем, в то время как путь потока направляет все магнитное поле в полезный канал, сводя к минимуму потери. Соблюдение правильного баланса важно при создании двигателя с максимальным крутящим моментом бесщеточного двигателя, который не потребляет огромной мощности. Понимание полной конструкции двигателя позволяет инженерам Portescap упаковать максимально возможную мощность в самый компактный двигатель.
Платформа Ultra EC™ от Portescap предлагает 3 семейства бесщеточных бесщелевых двигателей, которые помогут вам удовлетворить широкий спектр требований к крутящему моменту и скорости бесщеточных двигателей. Запатентованный U-образный змеевик обеспечивает выдающуюся производительность, включая минимальные потери в стали, повышенную эффективность и более низкую температуру. Ключом к выдающимся характеристикам этих мини-бесколлекторных двигателей является новая катушка, разработанная Portescap в Швейцарии. Эта уникальная конструкция катушки позволяет, например, двухполюсным двигателям развивать крутящий момент бесщеточного двигателя на 30 % больше по сравнению с двигателем того же размера, использующим обычную конструкцию катушки, при этом существенно снижая потери в стали.
Эта уникальная конструкция катушки позволяет, например, двухполюсным двигателям развивать крутящий момент бесщеточного двигателя на 30 % больше по сравнению с двигателем того же размера, использующим обычную конструкцию катушки, при этом существенно снижая потери в стали.
ТЕХНОЛОГИЯ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА: С ПРОРЕЗАМИ И БЕЗ ПРОРЕЗЕЙ
Portescap предлагает в основном два типа технологий бесщеточных двигателей постоянного тока: с прорезями и без прорезей. Оба этих бесщеточных двигателя постоянного тока имеют роторы с постоянными магнитами с 2 или 4 парами полюсов. Щелевые бесщеточные двигатели постоянного тока имеют катушки, вставленные в пазы статора. Благодаря этим пазам ротор занимает предпочтительное положение равновесия, когда двигатель обесточен. Этот резистивный крутящий момент называется зубчатым или стопорным крутящим моментом. Бесщелевые бесщеточные двигатели постоянного тока имеют самонесущую цилиндрическую катушку, которая не создает фиксирующий момент, поэтому ротор не имеет предпочтительных положений равновесия. Обе эти технологии бесщеточных двигателей постоянного тока отличаются высокой эффективностью, высокой скоростью и возможностью использования датчиков Холла/бессенсорных датчиков.
Обе эти технологии бесщеточных двигателей постоянного тока отличаются высокой эффективностью, высокой скоростью и возможностью использования датчиков Холла/бессенсорных датчиков.
В одной из технологий используется статор, состоящий из пакетированных стальных пластин с обмоткой, размещенной в пазах, прорезанных в осевом направлении по внутренней периферии. Это называется двигателем BLDC, конструкция из железа с прорезями. В другой технологии используется самонесущая цилиндрическая катушка без сердечника, изготовленная по той же технологии намотки, что и для наших двигателей постоянного тока с ротором без сердечника. Это называется двигателем BLDC, бесщелевой железной конструкцией.
ПРЕИМУЩЕСТВА БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Даже при работе на чрезвычайно высоких скоростях бесщеточные двигатели постоянного тока обеспечивают долгий и безотказный срок службы, поскольку отсутствует механическая коммутация. Они имеют в основном линейные характеристики двигателя с отличным контролем скорости и положения. В бесщеточных двигателях статические обмотки прикреплены к корпусу двигателя, что обеспечивает улучшенный отвод тепла и устойчивость к перегрузкам. Бесщеточные двигатели отличаются высоким КПД.
В бесщеточных двигателях статические обмотки прикреплены к корпусу двигателя, что обеспечивает улучшенный отвод тепла и устойчивость к перегрузкам. Бесщеточные двигатели отличаются высоким КПД.
БЕСЩЕТОЧНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА PORTESCAP
Бесщеточные двигатели постоянного тока Portescap чрезвычайно надежны и созданы для обеспечения наилучших характеристик. Их высокая удельная мощность позволяет уменьшить общий размер большинства приложений. Отличаются бесшумной работой даже на высокой скорости. Автоклавируемый вариант идеально подходит для медицинских применений.
Максимальный непрерывный крутящий момент опрокидывания составляет до 39 унций-дюйм (276 мНм). Их максимальный крутящий момент составляет до 332,7 унций на дюйм (2278 мНм). Они могут развивать скорость до 100 000 об/мин. Стандартные диаметры варьируются от 0,5 до 2,3 дюйма (от 12,7 до 58 мм).
Portescap может предоставить специальные двигатели для нужд вашего проекта. Для каждого типоразмера доступны стопки различной длины. Автоклавируемые варианты доступны для устройств, требующих стерилизации.
Автоклавируемые варианты доступны для устройств, требующих стерилизации.
Portescap предлагает индивидуальную обмотку, модификацию вала, включая полый вал, а также специальные материалы, покрытие и покрытие. Длина провода, тип, цвет и разъем, редукторы и энкодеры могут быть настроены по индивидуальному заказу.
Большинство наших продуктов BLDC можно настроить или модифицировать с помощью специальных функций, включая:
- Специальные стержни (более длинные или короткие, большего или меньшего диаметра, поперечные отверстия, осевые отверстия, канюлированные, специальные материалы и покрытия)
- Специальная конструкция для немедицинского применения (алюминиевый корпус/концевые манжеты, стальные компоненты редуктора, стальные подшипники)
- Специальные обмотки (более высокое напряжение, разные скорости)
- Специальные наконечники проводов (без разъемов, специальные разъемы, встроенные разъемы, специальные цвета)
- Особенности монтажа
- Альтернативные материалы ламелей
- Альтернативные магнитные материалы
- Стерилизуемый вариант
- Опции энкодера
ПРИМЕНЕНИЕ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Бесщеточные двигатели постоянного тока являются неотъемлемой частью многих приложений, особенно в медицинских устройствах, промышленной автоматизации, аэрокосмической и оборонной промышленности, безопасности и доступе и других отраслях.
MEDICAL
Электродвигатели постоянного тока BLDC идеально подходят для высокоскоростных хирургических и стоматологических ручных инструментов, в том числе инструментов для малых и больших костей и стоматологических инструментов, таких как сверла. Они также очень эффективны для респираторов и аппаратов ИВЛ, инфузионных и инсулиновых помп, стоматологических изображений и анализаторов.
- Высокоскоростные хирургические ручные инструменты
- Небольшие ручные костные хирургические инструменты
- Ручные хирургические инструменты для крупных костей
- Стоматологические ручные инструменты
- Респираторы и вентиляторы
- Инфузионные и инсулиновые помпы
- Стоматологическая визуализация
- Анализаторы
- Хирургическая робототехника
- Системы бионики и экзоскелета
ПРОМЫШЛЕННАЯ АВТОМАТИЗАЦИЯ
Бесколлекторные двигатели постоянного тока используются в промышленных гайковертах и отвертках, воздушных насосах, конвейерах и электронных сборочных устройствах.
- Промышленные гайковерты
- Промышленные отвертки
- Воздушные насосы
- Конвейеры
- Электронный блок
- Электрические захваты
АЭРОКОСМИЧЕСКАЯ И ОБОРОНА
Долговечность и надежность двигателей постоянного тока делают их хорошим выбором для бортовых приборов самолетов, гироскопов и спутников. Они также широко используются в клапанах, системах дозирования топлива и электрических приводах.
- Бортовая аппаратура воздушных судов
- Гироскоп
- Спутники
- Клапаны
- Система учета топлива
- Электропривод
- Роботы для обнаружения и обслуживания
БЕЗОПАСНОСТЬ И ДОСТУП
Компактный размер и низкая рабочая температура бесколлекторных двигателей постоянного тока делают их идеальными для использования в считывателях штрих-кодов, камерах, замках, а также в принтерах и диспенсерах билетов.
- Считыватели штрих-кода
- Камера
- Замки
- Билетный принтер и диспенсер
ДРУГОЕ
Другие области применения бесщеточных двигателей постоянного тока — робототехника, прецизионное измерительное оборудование и гравировка.
- Робототехника
- Прецизионные приборы
- Гравировка
СОСТАВ И ВАРИАНТЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА (BLDC)
| Детали | Характеристики | Преимущества |
|---|---|---|
| Бесщеточный двигатель постоянного тока с постоянными магнитами | Практически линейная кривая момент/скорость (без учета потерь в стали), где момент пропорционален току, а скорость пропорциональна напряжению | Простота управления скоростью и положением |
| Бесщеточный дизайн | Срок службы не ограничивается износом щеток, а только износом шарикоподшипников | Очень долгий срок службы, высокая надежность, нечувствительность к окружающей среде. Без искрения, без пыли. Пониженный звуковой и электрический шум |
| Автоклавируемая версия | Подходящее уплотнение и оптимизированная конструкция | Выдерживает циклы автоклавирования и стерилизации. Уплотнение предотвращает загрязнение Уплотнение предотвращает загрязнение |
| Статическая обмотка, прикрепленная к корпусу двигателя | Улучшенный отвод тепла | Перегрузочная способность |
ПРОРЕЗИ VS. BLDC MOTOR TECHNOLOGIES
| Детали | Щелевой | Без слота |
|---|---|---|
| Способность выдерживать суровые условия окружающей среды / Автоклавируемость | ++ | + |
| Соотношение крутящий момент/мощность | ++ | + |
| Высокая скорость | + | ++ |
| Срок службы батареи | + | ++ |
| Момент фиксации | — | + |
ВАРИАНТЫ ОБРАТНОЙ СВЯЗИ
| Детали | Характеристики | Преимущества |
|---|---|---|
| Версии без датчика Холла | Обычно используется в шпинделях | Экономично.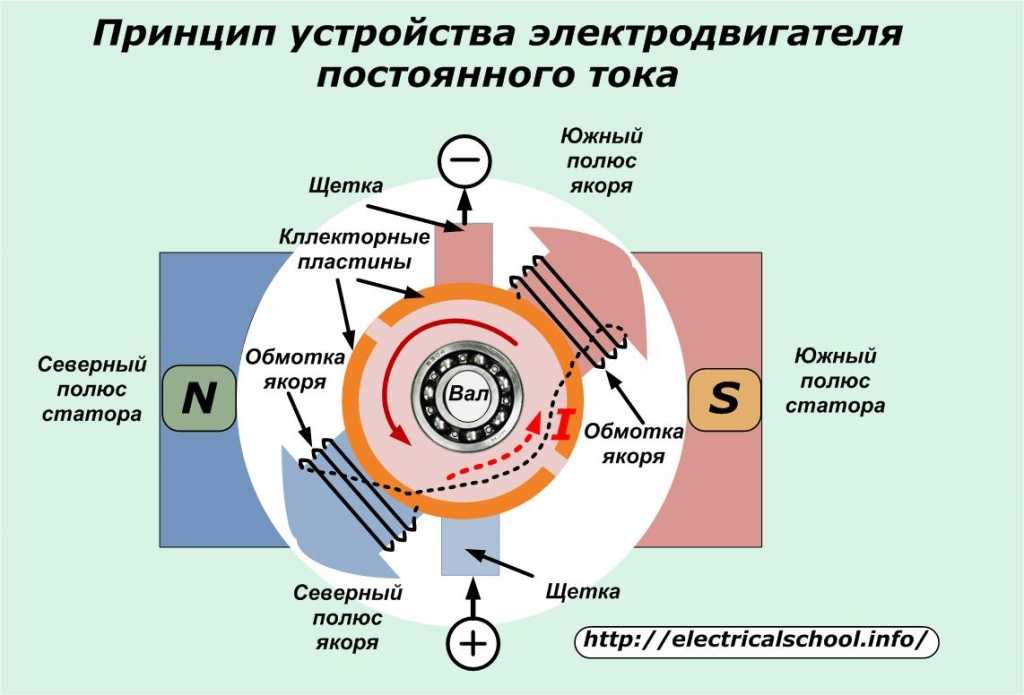 Менее чувствителен к окружающей среде. Всего три соединительных провода Менее чувствителен к окружающей среде. Всего три соединительных провода |
| Версии с датчиками Холла | Обычно используется в приложениях, где требуется изменение скорости или нагрузки | Очень простая схема коммутации |
| Версии с энкодером или резольвером | Обычно используется в поступательном движении | Очень точное регулирование скорости и положения |
| Версия со встроенной электроникой | Датчики Холла и схема управления встроены в двигатель | Конфигурация Plug and Play Может приводиться в действие как щеточный двигатель постоянного тока |
ЩЕЛЕВЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА – ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
| Бесщеточный DC с прорезями — задний концевой конус и печатная плата | Бесколлекторный DC с прорезями — Пакет пластин | Бесщеточный постоянный ток с прорезями — печатная плата |
| Бесщеточный двигатель постоянного тока с прорезями — ротор | Бесщеточный постоянный ток с прорезями — литой статор |
Основной учебник по проектированию двигателя — Обмотки
Электрическая машина
- Электрическая машина — датчик для преобразования электрической энергии в механическую энергию или механическую энергию в электрическую энергию
- Типы электрических машин
- Motors
- Типы электрических мах. 0048
- Sensors
- Electromagnets
- Electromagnetic Amplifiers, etc.
 0048
0048COMMON ELECTRIC MOTOR TYPES
- AC Induction Motor
- Squirrel Cage
- Wound Field
- Brushed DC Motor
- AC Synchronous Motor
- Постоянные магниты
- Поле раны
- Бесщеточный электродвигатель переменного/постоянного тока
- Реактивный электродвигатель
- Линейный электродвигатель
- Flat
- Tubular
- Stepper Motor
- Permanent Magnet (PM)
- Variable Reluctance (VR)
- Hybrid Stepper
- Linear
BRUSHED DC MOTOR CONSTRUCTION AND PERFORMANCE
- Easy to predict motor производительность
- Простая и недорогая управляющая электроника
- Использование устройства обратной связи необязательно
- Сложная для проектирования система щеток
- Ограниченная доступность компонентов системы щеток
- Очень сложно предсказать срок службы щеток
- Не лучший выбор для высокопроизводительного применения
- Очень низкая стоимость производства для массового производства при полном оснащении
ТИПИЧНЫЕ ПРИМЕНЕНИЯ ДЛЯ ЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
- Легко предсказать характеристики двигателя для трехфазных обмоток, что, как известно, сложно для однофазных конструкций
- Ограниченная доступность для медных роторов
- По-прежнему популярный выбор для новых военных и коммерческих аэрокосмических устройств с частотой 400 Гц
- Низкие производственные затраты, низкие для массового производства при полном оснащении инструментами
ТИПИЧНЫЕ ПРИМЕНЕНИЯ ДЛЯ ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА
КОНСТРУКЦИЯ И ХАРАКТЕРИСТИКИ ГИБРИДНЫХ ШАГОВЫХ ДВИГАТЕЛЕЙ для прогнозирования характеристик двигателя на основе опыта проектирования
ТИПИЧНЫЕ ПРИМЕНЕНИЯ ДЛЯ ШАГОВЫХ ДВИГАТЕЛЕЙ
- Низкоточное позиционирование без устройства обратной связи
- Позиционирующее оптическое устройство/линзы с обратной связью
- Роботизированное позиционирование суставов
- Блоки поворота и наклона
- Маломощные, низкоскоростные сканеры
- Радарные приводы (ограниченное вращение, низкая инерция или мощность)
- 3D-принтеры
- Пропорциональные клапаны — гидравлические, регуляторы подачи топлива и т. д.
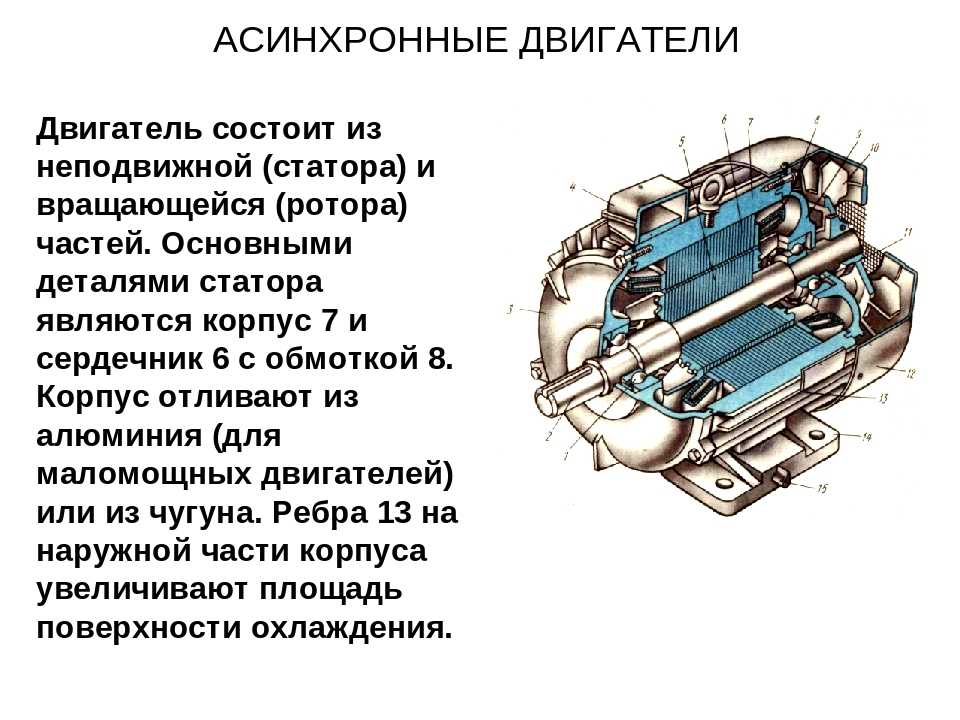 д.
д.КОНСТРУКЦИЯ И ХАРАКТЕРИСТИКИ БЕСЩЕТОЧНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
- Легко предсказуемая производительность двигателя, однако чрезвычайно зависящая от привода/контроллера
- Выбор двигателя для нового двигателя высокопроизводительные приложения
- Очень высокая удельная мощность
- Очень высокие скорости
- Очень высокий КПД
- Требуется устройство обратной связи
Прочтите о том, как выбор магнита и его реализация влияют на общую производительность двигателя BLDC
Типичные применения для бесщеточных двигателей
- Применения с высокой производительности
- FIN Controls
- Управление TVC
- Multi-Mode Radar Drives
- Gimbals
- Turret Drives
- Gimbals
- Turret Drives
- Gimbals
- . Насосы и вентиляторы
- Тяговые приводы транспортных средств
- Высокая надежность и срок хранения
КОНСТРУКЦИЯ И ХАРАКТЕРИСТИКИ РЕМОНТНОГО ДВИГАТЕЛЯ
- С электронной коммутацией
- Без постоянных магнитов
- Высокая пульсация крутящего момента
- Сложно предсказать производительность двигателя
- Когда-то это была основная альтернатива индукционным и бесщеточным конструкциям постоянного тока ТИПИЧНЫЕ ПРИМЕНЕНИЯ ИНСТРУМЕНТАЛЬНОГО ДВИГАТЕЛЯ
КОНСТРУКЦИЯ И ХАРАКТЕРИСТИКИ ЛИНЕЙНОГО ДВИГАТЕЛЯ
- Легко предсказуемые характеристики двигателя
- Очень высокие скорости
- Очень высокая точность
- Лучше всего подходит для легких/низкоинерционных нагрузок
- Ограниченная длина хода
- Выбор двигателя для новых и/или высокопроизводительных применений
- Высокая стоимость производства ДВИГАТЕЛИ
- Малые линейные двигатели
- Производство полупроводников
- Производство плоских панелей
- Конвейерные системы
- Обработка багажа в аэропортах
- Accelerators and Launchers
- Pumping of Liquid Metal
- Large Linear Motors
- Transportation (Low & Medium Speed Trains)
- Sliding Doors Closure (Malls, Metros)
- People Movers
- Material Handling and Storage
ОБЫЧНО ИСПОЛЬЗУЕМЫЕ ДАТЧИКИ
- Резольверы/синхронизаторы
- Промышленные серводвигатели
- Авиакосмическая и военная промышленность
- Скважинная разведка нефти и газа
- Применения с высокими требованиями к температуре и механической вибрации
- Сложно предсказать производительность
- Трудно достичь высокой точности из-за производственных отклонений
- Производственные затраты могут быть низкими при массовом производстве при полной оснастке
- Никаких новых разработок, в основном второй источник путем согласования характеристик резольвера
ЭЛЕКТРОМАГНИТЫ/СОЛЕНОИДЫ
- Промышленные
- Магнитно-механическая опора
- Automotive
COMMONLY USED MATERIALS
MAGNETIC MATERIALS
- Carbon steels
- Stainless steel
- Silicon steels
- High saturation alloys
- Amorphous ferromagnetic alloys
- Soft magnetic powder composites
- Nanostructured materials
- Ceramic
- Alnico
- Редкоземельные элементы
ДИЭЛЕКТРИЧЕСКИЕ МАТЕРИАЛЫ
- Бумага
- Эпоксидная смола
- Пластик
Магнитный проволочный проволочный
- Малые линейные двигатели
- Сталь CRML
- Неориентированная кремнистая сталь
- Зерноориентированная кремнистая сталь
- Аморфный сплав на основе железа
- Тонколистовая кремнистая сталь
- 6-1/2% Nickel-Iron Alloy
- 49% Nickel-Iron Alloy
- 80% Nickel-Iron Alloy
- Cobalt-Iron Alloy
- Powdered Alloys-SMC
CORE LOSS
- Fair
- Good
- Better
- Better
- Better
- Better
- Better
- Best
- Good
- *
PERMEABILITY
- Good
- Fair
- Better
- High
- Good
- Good
- High
- High
- Better
- *
EASE OF PROCESSING
- Best
- Good
- Fair
- Much Care Required
- Fair
- Care Required
- Care Required
- Care Required
- Care Required
- *
* Конечные свойства и стоимость материалов SMC в значительной степени определяются конструкцией машины и поэтому не упоминаются в этой таблице 9.
0003ПРИМЕРЫ
- Ухудшение магнитных свойств из-за штамповки
- Полностью обработанный материал — это просто материал, отожженный до оптимальных свойств на сталелитейном заводе. Даже после отжига на заводе полностью обработанный материал может потребовать дополнительного отжига для снятия напряжений после штамповки. Напряжения, возникающие во время перфорации, ухудшают свойства материала по краям ламината и должны быть устранены для достижения максимальной производительности. Это особенно актуально для деталей с узкими сечениями или там, где требуется очень высокая плотность потока
COMMONLY USED MAGNET MATERIALS
MATERIAL
- Cast Alnico
- Sintered Alnico
- Ceramic (Hard Ferrite)
- Samarium Cobalt
- Neodymium Iron Boron
- Iron-Chrome Cobalt
- Bonded Flexible (Callenered or Экструдированный
- Склеенный пластик (формованный)
- Склеенный под давлением Neo (эпоксидный)
МАГНИТНЫЕ СВОЙСТВА
- Br – 5,500 – 13,500 Hc – 1,97500 MGOE 1,4 — 10,5
- BR — 6000 — 10 800 HC — 550 — 1 900 MGOE 1,4 — 5,0
- BR — 3450 — 4,100 HCI — 3000 — 4800 мг. — 18 — 32
- BR — 10 500 — 14 000 HCI — — 14 000 мг. °C 0,18 % / °C $3 MGOe 1,4 – 6,2
- Br – 2 500 – 6 900 Hci – 3 000 – 16 000 Феррит 450°C 0,18 % / °C $3 MGOe – 1,5 – 10,5
- Br – 6,200 – 8,200 Hci – 4,300 – 18,000 MGOe – 7.5 – 15.0
CURIE TEMPERATURE
- 840°C
- 840°C
- 450°C
- 750°C / 825°C
- 310°C
- 600°C
- Феррит 450°C Neo 310°C
- Феррит 450°C Neo 310°C
- Neo 310°C
7
- 40 долларов
- 23 доллара
- 2 доллара
- 125 долларов
- 95 долларов
- 30 долларов
- $3 $30-$50
- $3 $60
- $60
 0003
0003 — 18 — 32
— 18 — 32COMMONLY USED EPOXY
TEMP CLASS
- B
- B
- B
- B
- B
- B
- B
НОМЕР ПРОДУКТА
- 260 260CG
- 262
- 263
- 270
- 5555
- 5388
- 5133
DESCRIPTION
- Spray and fluid bed drip application
- Нанесение распылением и капельным нанесением в псевдоожиженном слое
- Нанесение распылением и капельным нанесением в псевдоожиженном слое при высокой стойкости к прорези при высоких температурах
- Нанесение распылением и капельным нанесением в псевдоожиженном слое для высокотемпературного прорезания и перекрытия зазоров
- Холодный электростатический псевдоожиженный слой, горячий спрей Вентури или погружение в горячую жидкость для статоров и якорей двигателей малой мощности
- Процесс в электростатическом псевдоожиженном слое, превосходная стойкость к проколам и хорошая термостойкость, химическая стойкость и влагостойкость
- Electrostatic coating for cold as well as heated parts
SPECFIC GRAVITY
- 1. 43
- 1.34
- 1.47
- 1.48
- 1.7
- 1.57
- 1.45
 43
43EDGE COVERAGE
- 100 (11,3)
- 38-48
- 40-50
- 35-40
- B
- 35 (11,3)
- 15 (13,8)
- Устойчивый0048
- 100 (11.3)
- 100 (11.3)
- 100 (11.3)
- 120 (13.8)
- 160 (18.1)
- 100
- 120
DIELECTRIC STRENGHT
- 1000 (12- покрытие 15 мил)
- 1000 (покрытие 10 мил)
- 1000 (покрытие 12-15 мил)
- 1000 (покрытие 10 мил)
- 1300 (В/мл2)
- 1100 (В/мил) 500 (В/мил)
ОБЪЕМНОЕ СОПРОТИВЛЕНИЕ
- 10 15
- 10 13
- 10 15
- 10 13
- 5×10 14
COMMONLY USED EPOXY
TEMP CLASS
- B
- B
- B
- B
- B
- B
- B
НОМЕР ТОВАРА.
- 260 260CG
- 262
- 263
- 270
- 5555
- 5388
- 5133
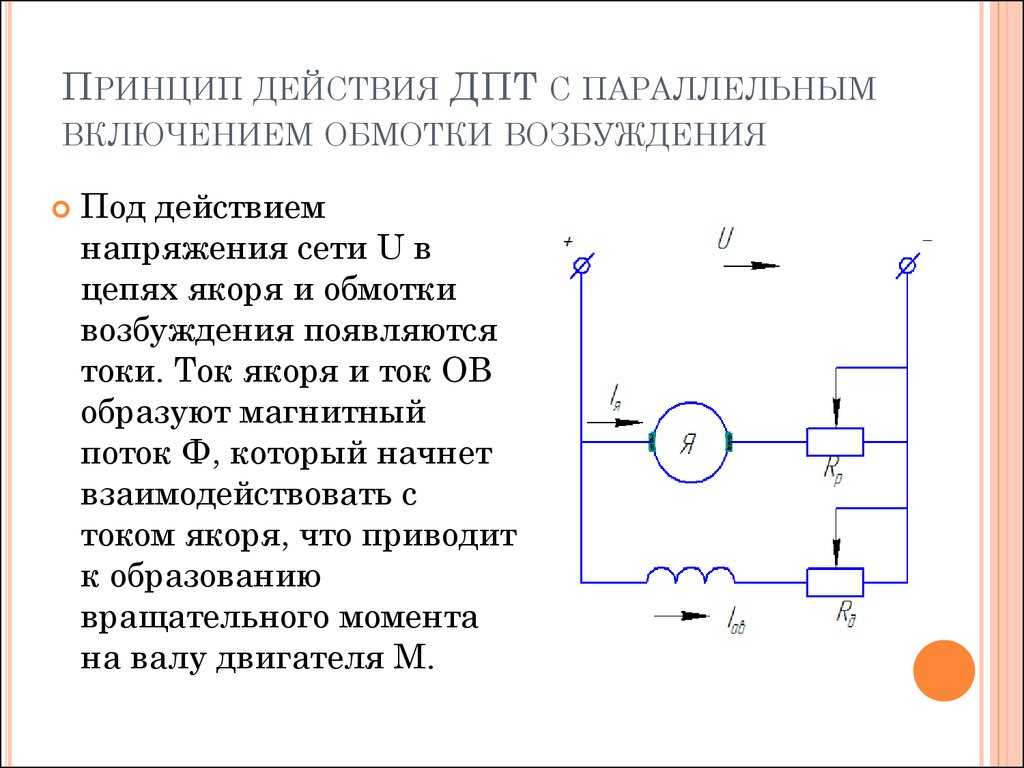
Описание
- ПРИМЕР И ПЛИЧЕСКИЙ ПЕРЕДНЯЯ ПЕРЕДНЯЯ ПЕРЕВОДА
- SPRAY и Fluid Bread Drip.
- Холодный электростатический псевдоожиженный слой, горячий спрей Вентури или погружение в горячую жидкость для статоров и якорей двигателей малой мощности
- Процесс электростатического пласта жидкости, превосходная резистентность и устойчивость к нагреву, химическую и влажность
- Электростатическое покрытие для холода, а также нагреваемые детали
Спекцина 1.48
- 1.7
- 1.57
- 1.45
EDGE COVERAGE
- 100 (11.3)
- 38-48
- 40-50
- 35-40
- B
- 35 (11,3)
- 15 (13,8)
Устойчивость к воздействию
- 100 (11,3)
- 100 (11,3)
- 100 (11,3)
- 100 (11,3)
- 100 (11,3)
- 100 (11,3)
- 100 (11,3)
- (11,3)
- 100 (11,3)
- (11,3)
- 100 (11,3)
- (11,3). (18,1)
- 100
- 120
 (18,1)
(18,1)Диэлектрик Страж
- 1000 (12-15 MIL COTPAT покрытие толщиной 10 мил)
- 1300 (В/мл2)
- 1100 (V/mil)
- 500 (V/mil)
VOLUME RESISTIVITY
- 5×1014
- B
- B
- B
- B
- B
- B
Color
- GREEN
- RED
- GREEN
- GREEN
- GREEN
- Blue
- Светлый синий
Обычно используемые магнитные проволоки 9005
. металлы, особенно медь
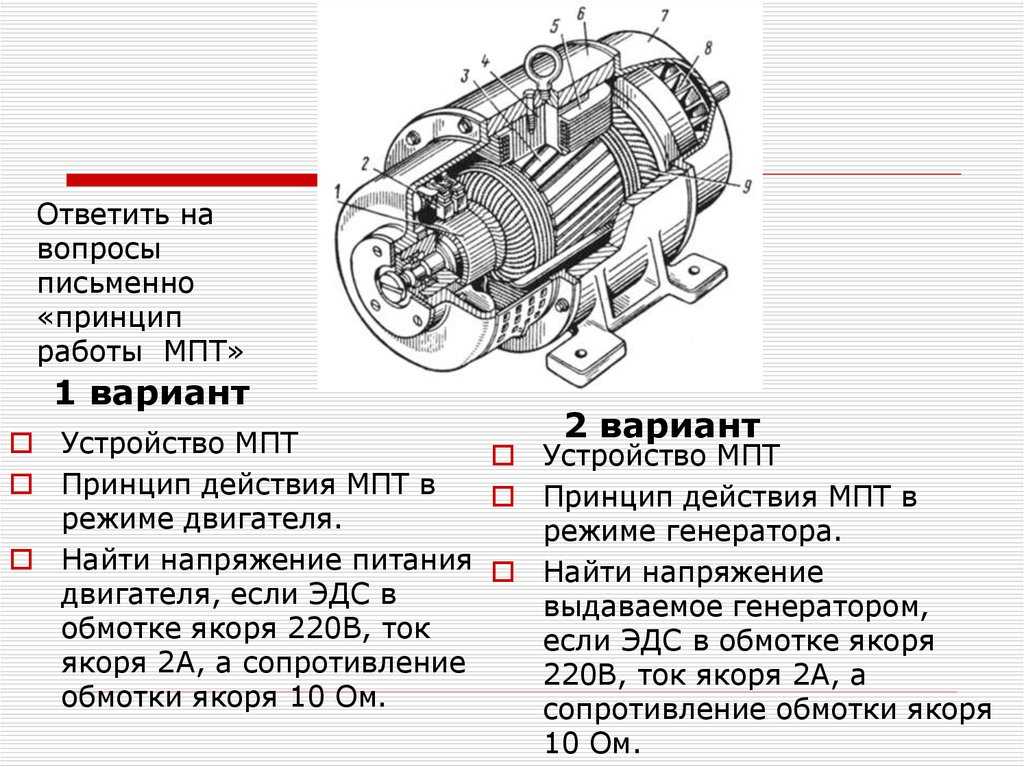
- В современном магнитном проводе обычно используется от одного до четырех слоев изоляции из полимерной пленки, часто двух разных составов, чтобы обеспечить прочный непрерывный изолирующий слой.
- Магнитный провод классифицируется по диаметру (AWG /SWG или миллиметра) или площадь (квадратные миллиметровые), температурный класс и изолярный класс
Самые распространенные конструкции Статора
474747474747474747447474747474747474747474747474747474474744474744447447447447447447444744474447444747444744474447444744474444474444474444474444474444444444444444444447н. ПАРАМЕТРЫ И ИСПЫТАНИЯ — ЧАСТЬ 1
- Механические размеры
- Определение геометрических размеров и допусков (GD&T) — это система для определения и передачи технических допусков. Он использует язык символов для инженерных чертежей и компьютерных трехмерных твердотельных моделей, который явно описывает номинальную геометрию и ее допустимые отклонения. Он сообщает производственному персоналу и машинам, какая степень точности и точности требуется для каждой контролируемой функции детали.
- Определение геометрических размеров и допусков (GD&T) — это система для определения и передачи технических допусков. Он использует язык символов для инженерных чертежей и компьютерных трехмерных твердотельных моделей, который явно описывает номинальную геометрию и ее допустимые отклонения.
- GD&T используется для определения номинальной (теоретически идеальной) геометрии деталей и сборок, для определения допустимого отклонения формы и возможного размера отдельных элементов, а также для определения допустимого отклонения между элементами.
- Стандарты ASME ASME Y14.5 – Определение размеров и допусков
- ISO TC 10 Техническая документация по продукту
- ISO/TC 213 Размерные и геометрические спецификации продукта и проверка0005
- Механические размеры
- Геометрические размеры и допуски (GD&T) — это система для определения и передачи технических допусков. Он использует язык символов для инженерных чертежей и компьютерных трехмерных твердотельных моделей, который явно описывает номинальную геометрию и ее допустимые отклонения. Он сообщает производственному персоналу и машинам, какая степень точности и точности требуется для каждой контролируемой функции детали.
- Геометрические размеры и допуски (GD&T) — это система для определения и передачи технических допусков. Он использует язык символов для инженерных чертежей и компьютерных трехмерных твердотельных моделей, который явно описывает номинальную геометрию и ее допустимые отклонения. Он сообщает производственному персоналу и машинам, какая степень точности и точности требуется для каждой контролируемой функции детали.
- GD&T используется для определения номинальной (теоретически идеальной) геометрии деталей и сборок, для определения допустимого отклонения формы и возможного размера отдельных элементов, а также для определения допустимого отклонения между элементами.
- Стандарты ASME ASME Y14.5 – Определение размеров и допусков
- ISO TC 10 Техническая документация по продукту
- ISO/TC 213 Размерные и геометрические спецификации продукта и проверка
ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И ИСПЫТАНИЯ — ЧАСТЬ 2
- Электрические параметры
- Пример:
- Измерьте и запишите линейные сопротивления и индуктивности A-B, B-C, C-A.
- Испытание статора после лакировки на повышенное напряжение и перенапряжение при 1800 В перем. тока, максимальная утечка тока 5 мА До и после лакировки провести испытание коронным разрядом (частичный разряд) с импульсом до 3000 В, но не более.
- Сопротивление
- Электрическое сопротивление электрического проводника — это сопротивление прохождению электрического тока через этот проводник. Электрическое сопротивление имеет некоторые концептуальные параллели с механическим понятием трения. Единицей электрического сопротивления в системе СИ является ом (Ом)
- Электрическое сопротивление электрического проводника — это сопротивление прохождению электрического тока через этот проводник.
- Индуктивность
- Индуктивность — это свойство электрического проводника, противодействующее изменению тока. Генри (обозначение: H) — производная единица измерения электрической индуктивности в системе СИ. .
- 1
- 2
- 3
- 4
- 5
- 6
- 7
Метод
- Устойчивость к изоляции
- Индекс поляризации
- DC High Poliling Test (Dielectric ShateStand Test)
- AC High потенциальная тестирование (DEALECTERTSTSTSTSTSHIND
- AC High потенциальная тестирование (DEALECTARTSTSTSTSTSHIND
- ACELELST (DEALCTARD TETSTSTSTSHIND). Испытание на разряд
- Коэффициент рассеяния
СТАНДАРТЫ
- IEEE 43 NEMA MG 1
- IEEE 43
- MG 1 IEEE 3 941, NEC 941, IEC0048
- IEC 60034 NEMA MG 1
- IEEE 522 NEMA MG 1
- IEEE 1434
- IEEE 286 IEC 60894
Параметр Электрической Машины и Тестирование
- High потенциальные т. . Эти три испытания различаются величиной приложенного напряжения и величиной (или характером) допустимого тока:
- Испытание на сопротивление изоляции измеряет сопротивление электрической изоляции между медными проводниками и сердечником статора. В идеале это сопротивление должно быть бесконечным. На практике не бесконечно высока. Обычно чем меньше сопротивление изоляции, тем больше вероятность, что проблема с изоляцией. Испытание на пробой диэлектрика. Испытательное напряжение увеличивают до тех пор, пока диэлектрик не выйдет из строя или не выйдет из строя, что приведет к протеканию слишком большого тока. Этот тест часто разрушает диэлектрик, поэтому этот тест используется на основе случайной выборки. Этот тест позволяет разработчикам оценить напряжение пробоя конструкции продукта и увидеть, где произошел пробой.
- Испытание на диэлектрическую стойкость. Прикладывают стандартное испытательное напряжение (ниже установленного напряжения пробоя) и контролируют результирующий ток утечки. Ток утечки должен быть ниже заданного предела, иначе испытание считается не пройденным. Это испытание является неразрушающим при условии, что оно не дает сбоев, и обычно требуется, чтобы агентства по безопасности выполняли его как 100-процентное испытание на производственной линии для всех продуктов, прежде чем они покинут завод.
IEEE Std 43-2000Рекомендации IEEE по проверке сопротивления изоляции вращающихся механизмов
ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И ИСПЫТАНИЯ — ЧАСТЬ 4
- Испытание на перенапряжение
- Если изоляция витка в обмотке статора с шаблонной обмоткой выйдет из строя, двигатель, скорее всего, выйдет из строя через несколько минут. Таким образом, изоляция витков имеет решающее значение для срока службы двигателя. Низковольтные испытания статоров с шаблонной обмоткой, такие как испытания индуктивности или индуктивного импеданса, могут определить, закорочена ли изоляция витка, но не ослаблена ли она. Только испытание импульсным напряжением может непосредственно обнаружить обмотки статора с поврежденной изоляцией витков. При подаче высокого напряжения между витками этот тест является испытанием на перенапряжение для изоляции витков и может привести к повреждению изоляции, что потребует шунтирования неисправной катушки, замены или перемотки.
- Если изоляция витка в обмотке статора с шаблонной обмоткой выйдет из строя, двигатель, скорее всего, выйдет из строя через несколько минут. Таким образом, изоляция витков имеет решающее значение для срока службы двигателя. Низковольтные испытания статоров с шаблонной обмоткой, такие как испытания индуктивности или индуктивного импеданса, могут определить, закорочена ли изоляция витка, но не ослаблена ли она.
Параметр и тестирование электрической машины — Часть 5
- Тест на частичный разряд
Организация/Стандарты/Директивы
- NEMA National Association Association
- NEMA Set STANGS для многих электроэлектрических продуктов. Например, «размер 11» означает, что монтажная поверхность двигателя составляет 1,1 дюйма. из этого. Примерами этих компонентов являются управляющие двигатели (серводвигатели и шаговые двигатели), устройства обратной связи (энкодеры и резольверы) и элементы управления.
- МЭК Международная электротехническая комиссия
- МЭК 60034 — международный стандарт для вращающихся электрических машин Секция Международной ассоциации по испытанию материалов
- REACH Регистрация, оценка, разрешение и ограничение химических веществ
- Директива RoHS об ограничении использования опасных веществ
- DO-160 «Условия окружающей среды и процедуры испытаний бортового оборудования» — это стандарт испытаний оборудования авионики на воздействие окружающей среды. Он публикуется Радиотехнической комиссией по аэронавтике (RTCA, Inc.)
- MIL-STD-810, Инженерно-экологические соображения и лабораторные испытания, публикуется Министерством обороны США
- ITAR Международные правила торговли оружием и Положения об экспортном контроле (EAR) — это два важных закона США об экспортном контроле, которые влияют на производство, продажу и распространение технологий.
- Системы менеджмента качества AS9001. Требования для авиационных, космических и оборонных организаций
- AS9002 Требования к проверке первого изделия в аэрокосмической отрасли
- ISO/TS 16949 общие требования к автомобильной системе качества, основанные на ISO 9001 и конкретных требованиях клиентов автомобильного сектора
Скачать PDF-копия страницы руководства по базовой конструкции двигателя
Конструкция бесщеточного двигателя постоянного тока (BLDC): новая отправная точка
Введение
Конструкция бесщеточного двигателя постоянного тока (BLDC) сложна.
Не помогает и то, что клиенты начинают свой выбор электроники (старая отправная точка), пробираясь через лабиринт огромных размеров; Ассортимент продукции для MOSFET, IGBT и драйверов затворов.onsemi здесь, чтобы помочь, предоставив «новую начальную точку приближения заказа 1 st », согласовывая привод затвора с ключом (N-FET или IGBT), намного ближе к окончательному решению клиента и опережая « старая отправная точка» кажущегося бесконечным выпаса продуктового портфеля. Это включает в себя 5 подробных таблиц, включающих напряжения двигателей; 12В, 24В, 48В, 60В, 120В, 200В, 300В, 400В и 650В, до 6кВт.
Рисунок 1
Бесщеточные двигатели постоянного тока (BLDC)
Бесщеточные двигатели постоянного тока (BLDC) обладают многими преимуществами по сравнению с щеточными двигателями постоянного тока с постоянными магнитами (PMDC), в частности, более высокая надежность, минимальное техническое обслуживание, меньшее потребление электроэнергии и акустический шум, лучшие тепловые характеристики, более широкий диапазон скоростей и более высокая удельная мощность.
Типичный двигатель BLDC использует постоянные магниты на роторе и три обмотки якоря (U, V, W) на статоре. Микроконтроллер (MCU) реализует одну из множества схем управления и модуляции (трапециевидная, синусоидальная, FOC с SVM, DTC и т. д.) для стратегической подачи питания на обмотки двигателя. Это создает электромагнитные поля, вызывающие взаимодействующую силу между магнитами ротора и обмотками статора. При правильном выполнении это взаимодействие позволяет точно контролировать скорость, крутящий момент или мощность двигателя в нужном направлении.На рис. 2 показана типичная блок-схема трехфазного бесконтактного двигателя постоянного тока. MCU выполняет микропрограмму схемы управления и модуляции, где он дает команду своим периферийным устройствам PWM выводить шесть скоординированных рабочих циклов на три полумостовых драйвера затвора. Эти три драйвера действуют как гидроусилитель для шести мощных полевых МОП-транзисторов в выходном мосту, питая полевые МОП-транзисторы U, V и W нижнего плеча (LS) и верхнего плеча (HS).
Обычно это N-канальные МОП-транзисторы, рассчитанные на 1,5–2,0-кратное напряжение двигателя, до ~ 300 В. При напряжении выше 300 В N-канальные МОП-транзисторы обычно заменяют IGBT из-за их более высокой мощности.MCU может измерять ток через каждую обмотку с помощью FAN4852, КМОП-усилителя (типовая полоса пропускания 9 МГц) и, опционально, может оценивать угловое положение ротора с обратной связью датчика Холла. В качестве альтернативы можно реализовать бездатчиковую архитектуру с большими затратами на обработку. RSL10 BLE можно использовать для отслеживания активов, обновления встроенного ПО по беспроводной сети (FOTA), выбора/настройки функций и сбора данных телеметрии.
Рисунок 2
BLDC Таблица №1: 12 В и 24 В (N-FET) до 1,1 кВт
N-канальные МОП-транзисторы на 12 В от 93 Вт до 372 Вт и 24 В от 186 Вт до 1,1 кВт.
Таблица 1
BLDC Таблица № 2: 48 В и 60 В (N-FET) до 1,5 кВтНачальная точка приближения порядка 1044» для согласования привода затвора BLDC с N-канальными МОП-транзисторами для 48 В от 186 Вт до 1,5 кВт и 60 В от 186 Вт до 1,5 кВт.
Таблица 2
BLDC Таблица № 3: 48V и 60 В (N-FETS) до 3KW
Таблица 3 ниже перечисляет «новый 1 ST . BLDC управляет затвором N-канальных МОП-транзисторов для 120 В от 186 Вт до 1,8 кВт и 200 В от 186 Вт до 3 кВт.
Таблица 3
BLDC Таблица №4: 300 В и 400 В (IGBT) до 6 кВт БТИЗ на 300 В от 372 Вт до 4,5 кВт и 400 В от 372 Вт до 6 кВт.
Таблица 4
BLDC Таблица №5: 300 В, 400 В и 650 В (IPM) до 6 кВт1043 st начало аппроксимации порядка» для интегрированных силовых модулей (IPM), где привод затвора и IGBT интегрированы в простой в использовании модуль, для 300 В от 372 Вт до 4,5 кВт, 400 В от 372 Вт до 6 кВт и 650 В от 372 Вт до 6кВт. Таблица 5 Пользователь вводит 15 рабочих условий, и инструмент создает несколько подробных аналитических таблиц, а также двенадцать графиков, отображающих критические тепловые и энергетические характеристики (рис.
3).Рисунок 3
Таблицы BLDC № 1– № 5
BLDC — это сложная система, требующая принятия сотен решений от начала до конца. Например, если вы взяли 3 разных клиентов; a, b и c (рис. 1), начиная с одной и той же «отправной точки» (двигатель 24 В, 1 1/4 л.с.), к тому времени, когда все 3 клиента пройдут свои соответствующие деревья решений, их окончательные проекты будут совершенно разными. Это связано с тем, что у каждого клиента есть свои пороговые значения стоимости, эффективности, удельной мощности, форм-фактора, технического обслуживания, срока службы и т. д. Таким образом, невозможно составить таблицы соответствия затвора и переключателя (MOSFET/IGBT) и сделать их правильными для каждый клиент. Если бы мы попытались, мы могли бы оказаться правильными для одного клиента и неверными для другого 9.99 клиентов. Тем не менее, мы можем сделать некоторые разумные предположения, основанные на разумных инженерных соображениях, и произвести «приближение заказа 1 st », которое находится где-то между передачей клиенту портфолио драйверов коммутаторов и затворов (старая отправная точка: вы сами по себе), и окончательное решение заказчика.
1 st Приблизительный порядок Технические соображения
1) Стоимость: Мы стремились отфильтровать самую низкую стоимость, учитывая следующие соображения.
2) Топологии: Была выбрана трапециевидная (также известная как 6-ступенчатое управление) коммутация, поскольку она относительно проста в управлении и обеспечивает высокую эффективность и высокий пиковый крутящий момент. Поскольку только два выключателя питания включены одновременно, каждый выключатель имеет рабочий цикл «включено» 33 %.
3) Рабочий цикл ШИМ: Частота ШИМ 15 кГц. Это типично для большинства BLDC мощностью менее 6 кВт.
4) Драйвер затвора: Изолированные драйверы затвора соединения. Эти таблицы не включают гальваническую развязку.
5) Температура: Температура окружающей среды 85 0 C.
6) Расчет привода затвора: Номинальный привод затвора рассчитывается путем деления Q G(TOT) на ON/nC.
Время выключения (нс). Мы выбрали 50 нс вкл/выкл для N-FET и 200 нс для IGBT.7) Температура перехода N-FET: (T J ) для упаковки для поверхностного монтажа (без радиатора) рассчитывается как T J = P DISS x R θ JA + Окружающая среда, оставляя минимальный запас на 25 0 C ниже максимального номинального T J .
- Где:
i. R θ JA = Тепловое сопротивление перехода к окружающей среде
8) Температура перехода IGBT: Температура перехода IGBT (T J ) для корпуса через отверстие с радиатором рассчитывается по формуле T J = P ДИСС x (R θ JC + R θ CS + R θ SA )+ Окружающая среда, оставляя минимальный запас на 50 0 C ниже максимального номинального T J .
- Где:
i. R θ JC = тепловое сопротивление перехода к корпусу
ii. R θ CS = тепловое сопротивление между корпусом и радиатором
iii. R θ SA = Тепловое сопротивление радиатора к окружающей среде
9) N-FET Рассеиваемая мощность: I ФАЗА 2 (A) x R DSON (Ом).
10) Рассеиваемая мощность IGBT: Потери при переключении + потери на проводимость + потери на диоде
- Где:
i. Потери при переключении = E ts (Дж) x Частота ШИМ (Гц)
ii. Потери проводимости = I PHASE (A) x V CE(SAT) (V)
iii. Диодные потери = (коммутационные потери + потери проводимости) x 0,25
11) Номинальное напряжение переключения: N-FET В (BR)DSS и IGBT V CES = 2-3x Напряжение двигателя
12) Номинальный ток переключения: N-FET I
8 IGBT I C = 3 x I PHASE .
13) Фазный ток двигателя: I ФАЗА = 1,23 x P ВЫХ / В ШИНА
- Где:
i. I PHASE = Ток фазы двигателя, Ампер
ii. P OUT = выходная электрическая мощность преобразователя на двигатель
iii. PF = коэффициент мощности двигателя, 0,0–1,0, идеальное значение 1,0 (мы предполагаем 0,85)
iv. V BUS = Напряжение шины двигателя, В пост. тока или 24 В
v. MI = Индекс модуляции, 0,0–1,0, обычно 0,9 (мы предполагаем, что 0,9)
Узнайте больше об управлении двигателем.
- Двигатель постоянного тока BLDC Страница
- Основы драйвера двигателя постоянного тока
- Веб-семинар: Конструкция бесщеточного двигателя постоянного тока (BLDC): новая отправная точка
Двигатели постоянного тока | Machine Design
В промышленных приложениях используются двигатели постоянного тока, потому что соотношение скорости и крутящего момента может варьироваться практически в любой полезной форме — как для двигателей, так и для рекуперации в любом направлении вращения.
Непрерывная работа двигателей постоянного тока обычно доступна в диапазоне скоростей 8:1. Неограниченный диапазон (плавное регулирование до нулевой скорости) на короткое время или при уменьшенной нагрузке также является обычным явлением.Двигатели постоянного тока часто применяются там, где они мгновенно развивают момент, в три или более раз превышающий их номинальный крутящий момент. В аварийных ситуациях двигатели постоянного тока могут развивать крутящий момент, превышающий номинальный в пять раз, без остановки (если позволяет источник питания).
Динамическое торможение (генерируемая двигателем энергия подается на резисторную сетку) или рекуперативное торможение (генерируемая двигателем энергия возвращается в источник постоянного тока) может быть достигнуто с помощью двигателей постоянного тока в приложениях, требующих быстрой остановки, что устраняет необходимость в, или уменьшение размера, механический тормоз.
Скорость двигателя постоянного тока можно плавно регулировать до нуля с последующим ускорением в противоположном направлении — без переключения силовой цепи.
А двигатели постоянного тока быстро реагируют на изменения управляющих сигналов благодаря высокому отношению крутящего момента к моменту инерции.Типы двигателей: Двигатели постоянного тока с обмоткой обычно подразделяются на параллельную, последовательную и составную обмотку. В дополнение к ним также доступны двигатели с постоянными магнитами и бесщеточные двигатели, обычно в виде двигателей с дробной мощностью. Двигатели могут быть дополнительно классифицированы для прерывистого или непрерывного режима работы. Двигатели с длительным режимом работы могут работать без периода отключения.
Управление скоростью: Существует два способа регулировки скорости двигателя постоянного тока с раневым полем. Иногда используются их комбинации.
Управление шунтирующим полем: Приводы барабанов требуют такого управления. Материал наматывается на барабан с постоянной линейной скоростью и постоянным натяжением ленты независимо от диаметра.
Управление достигается за счет ослабления тока параллельного возбуждения двигателя для увеличения скорости и уменьшения выходного крутящего момента при заданном токе якоря. Поскольку мощность двигателя постоянного тока определяется нагревом, максимально допустимый ток якоря примерно постоянен во всем диапазоне скоростей. Это означает, что при номинальном токе выходной крутящий момент изменяется обратно пропорционально скорости, и двигатель имеет постоянную мощность в лошадиных силах во всем диапазоне скоростей.
Эта система хороша только для получения скорости выше базовой. Мгновенное снижение скорости ниже базовой может быть достигнуто за счет перевозбуждения поля, но длительное перевозбуждение приводит к перегреву двигателя. Кроме того, магнитное насыщение в двигателе допускает лишь небольшое снижение скорости при существенном увеличении напряжения возбуждения.
Максимальный стандартный диапазон скоростей при управлении полем составляет 3:1, и это происходит только при низких базовых скоростях.
Специальные двигатели имеют более широкий диапазон скоростей, но если диапазон скоростей значительно превышает 3:1, по крайней мере, для части диапазона используется какой-либо другой метод управления.Контроль напряжения якоря: В этом методе ток шунтирующего поля поддерживается постоянным от отдельного источника, в то время как напряжение, подаваемое на якорь, изменяется. Скорость пропорциональна ЭДС счетчика, которая равна приложенному напряжению минус падение IR цепи якоря. При номинальном токе крутящий момент остается постоянным независимо от скорости (поскольку магнитный поток постоянен), и, следовательно, двигатель имеет постоянный крутящий момент во всем диапазоне скоростей.
Мощность напрямую зависит от скорости. На самом деле, когда скорость двигателя с самовентиляцией снижается, он теряет вентиляцию и не может быть нагружен таким же большим током якоря без превышения номинального повышения температуры.
Выбор: Выбор двигателя постоянного тока и сопутствующего оборудования для данного применения требует учета нескольких факторов.
Диапазон скоростей: Если используется управление полем и требуется большой диапазон скоростей, базовая скорость должна быть пропорционально ниже, а размер двигателя должен быть больше. Если диапазон скоростей значительно превышает 3:1, следует рассмотреть возможность управления напряжением якоря, по крайней мере, для части диапазона. Очень широкий динамический диапазон скоростей может быть получен при регулировании напряжения якоря. Однако при скорости ниже примерно 60 % от базовой скорости двигатель следует снизить или использовать только в течение коротких периодов времени.
Изменение скорости в зависимости от крутящего момента: В приложениях, требующих постоянной скорости при всех требованиях к крутящему моменту, следует использовать двигатель с параллельным возбуждением. Если необходимо свести к минимуму изменение скорости под нагрузкой, необходимо использовать регулятор, например, с обратной связью от тахометра.
Когда скорость должна снижаться по мере увеличения нагрузки, можно использовать двигатели с комбинированной или последовательной обмоткой.
Или источник питания с падающей вольт-амперной характеристикой можно использовать с двигателем с параллельной обмоткой.Реверс: Эта операция влияет на питание и управление, а также может повлиять на регулировку щеток, если двигатель не может быть остановлен для переключения перед реверсом. В этом случае не следует использовать составные и стабилизирующие обмотки, а питание должно обеспечивать подходящая система управления напряжением якоря.
Рабочий цикл: Двигатели постоянного тока редко используются в приводах, которые постоянно работают с одной скоростью и нагрузкой. Необходимый размер двигателя может быть определен либо требованием пикового крутящего момента, либо нагревом.
Пиковый крутящий момент: Пиковый крутящий момент, развиваемый двигателем постоянного тока, ограничен той нагрузкой, при которой начинается повреждающая коммутация. Повреждение щеток и коллектора зависит от силы и продолжительности искрообразования.
Следовательно, пиковый крутящий момент зависит от продолжительности и частоты возникновения перегрузки. Пиковый крутящий момент часто ограничивается максимальным током, который может обеспечить источник питания.Двигатели могут коммутировать большие нагрузки на низкой скорости без повреждений. Стандарты NEMA определяют, что машины постоянного тока должны выдавать не менее 150% номинального тока в течение 1 мин при любой скорости в пределах номинального диапазона, но большинство двигателей работают намного лучше.
Нагрев: Температура зависит от вентиляции и электрических/механических потерь в машине. Некоторые потери, такие как потери в сердечнике, шунтирующем поле и трении щеток, не зависят от нагрузки, но зависят от скорости и возбуждения.
Наилучший способ прогнозирования рабочей температуры — использование кривых тепловых характеристик, доступных у производителя. Если кривые недоступны, температуру можно оценить методом потерь мощности. Для этого метода требуется кривая зависимости общих потерь от нагрузки или кривая эффективности.
Для каждой части рабочего цикла вычисляются потери мощности, которые умножаются на продолжительность этой части цикла. Сумма этих произведений, деленная на общее время цикла, дает среднюю потерю мощности. Отношение этого значения к потерям мощности при номинальной мощности двигателя умножается на номинальное повышение температуры, чтобы получить приблизительное повышение температуры двигателя при работе в этом рабочем цикле.
Полное руководство (обязательно к прочтению)
Вам нужен двигатель постоянного тока для инженерного проекта, но вы не знаете об этом? Или вам нужна дополнительная информация о том, как применить его к электронному устройству? Тогда вы в правильном месте.
Двигатели постоянного тока необходимы, если вы хотите создать движение в любом устройстве, но понять его может быть сложно, потому что он наполнен множеством математических и физических концепций.
Итак, если вы столкнулись с таким препятствием, вам понадобится упрощенное руководство.
Вот где мы вступаем. Кроме того, эта статья расскажет вам, что вам нужно знать о двигателях постоянного тока, о том, как они работают, их типах и различных областях применения.Начнем.
Содержание
- 1. Что такое двигатель постоянного тока и как он работает?
- 2. Типы двигателей постоянного тока
- 3. Применение двигателей постоянного тока
- Резюме
1. Что такое двигатель постоянного тока и как он работает?
В этом разделе мы дадим определение двигателю постоянного тока и объясним вам, как он работает.
1.1. Что такое двигатель постоянного тока?
Изображение, показывающее двигатель постоянного тока
Двигатели постоянного тока представляют собой электрические машины, преобразующие электрическую энергию в движение. Как роторная машина, двигатель постоянного тока преобразует электроэнергию в постоянный ток.
Кроме того, двигатели постоянного тока могут различаться по мощности и размеру — от маленьких, как двигатели, приводящие в движение игрушки, до больших, как механизмы, приводящие в движение лифты и транспортные средства.Но это еще не все.
Двигатель постоянного тока состоит из двух важных компонентов: обмотки якоря и статора. Кроме того, вращение якоря — это вращающаяся часть двигателя Hobby, а статор — часть, которая остается неподвижной.
Опять же, статоры подобны постоянным подковообразным магнитам, которые создают магнитное поле, необходимое для вращения якоря.
Кроме того, двигатели постоянного тока отлично подходят для питания различных устройств, особенно если вы хотите, чтобы они двигались. Поскольку он различается по размеру, вы можете использовать его для больших или малых проектов.
Кроме того, двигатели постоянного тока можно найти во многих портативных бытовых приборах, автомобилях и промышленном оборудовании.
1.
2. Каков основной принцип работы двигателя постоянного тока Чтобы двигатель постоянного тока создавал движение, он следует фундаментальному принципу.
И это гласит:
Всякий раз, когда вы помещаете проводник с током (поля якоря) в магнитное поле (статоры), это вызывает механическую силу (движение).
В соответствии с этим принципом двигатели постоянного тока будут работать только тогда, когда на ток, протекающий по якорю, действует сила, достаточно мощная, чтобы сдвинуть его — при помещении в магнитное поле — создаваемое статорами.
2. Типы двигателей постоянного тока
Теперь, когда вы знаете, что такое двигатели постоянного тока и как они работают, давайте рассмотрим доступные типы двигателей постоянного тока; одномоторный или двухмоторный драйвер.
Включая;
1. Бесщеточный двигатель постоянного тока
Бесщеточный двигатель постоянного тока
По названию можно сказать, что это мини-двигатель без щетки.
Кроме того, щетки — это скользящие устройства, которые позволяют электричеству течь в медную катушку провода.
Как же тогда бесщеточные двигатели постоянного тока генерируют мощность и движение?
Во-первых, бесщеточный двигатель постоянного тока имеет ротор с постоянными магнитами. Кроме того, статор имеет электромагниты, окруженные компонентами двигателя, обмотками и катушками. Кроме того, катушки здесь стационарные, что устраняет необходимость в щетках.
Итак, ротор раскручивается на 180 градусов из-за электрического тока, проходящего по цепи якоря. Кроме того, электромагнитные полюса в обязательном порядке вращаются, чтобы электрический ток продолжал течь.
Pros
- Бесколлекторные двигатели не производят искр или шума трения при работе
- Эффективен в легковоспламеняющихся средах
- Без щеток, без обслуживания
- Дешевле традиционных коллекторных двигателей той же мощности
- Более надежный, чем коллекторные двигатели постоянного тока
- Обеспечивает низкие затраты на электроэнергию
Минусы
- Требуется электронный драйвер
- Удельная мощность обычно ниже.
2. Mrashed DC Motors
Мотор DC DC Motors
Моторы DC -моторы — это противоречия моторов DC DC. Этот электродвигатель и миниатюрные двигатели генерируют механическую силу — непосредственно за счет энергии постоянного тока, подаваемой на двигатель.
Также используется внутренняя коммутация, стационарные магниты, вращающиеся электромагниты и, конечно же, щетки.
Щетки состоят из углерода или графита, а также содержат диспергированную медь, которая помогает улучшить проводимость.
Плюсы
- Привлекательные цены
- Высокая надежность
- Измерение тока
- Замечательные угольные щетки
- Простое управление скоростью двигателя, без сложного управления скоростью двигателя
Минусы
- Высокая потребность в обслуживании и короткий срок службы для интенсивного использования
3.
Шунтирующие двигатели постоянного тока Шунтирующая модель постоянного тока представляет собой базовый привод двигателя с катушкой возбуждения, подключенной параллельно или параллельно якорю. Благодаря такому параллельному соединению обмотки возбуждения и якоря получают одинаковый диапазон рабочего напряжения.
Pros
- Широкий диапазон скоростей
- Двигатель выдающейся серии
- Эффективный моторный привод
- Можно независимо контролировать напряжение якоря и обмотки возбуждения
- Вы можете использовать шунтирующие двигатели постоянного тока на машине постоянного тока, если необходим широкий диапазон крутящего момента и скорости
Минусы
- Плохо для низкоскоростных операций
- Большой размер по сравнению с другими двигателями
- Дорогие затраты на установку
4.
Двигатели постоянного тока серии процедура наматывания медной обмотки для двигателей постоянного тока серии
Обмотки возбуждения и якоря соединены последовательно для серийного двигателя постоянного тока, что позволяет пропускать более высокие токи.
Кроме того, двигатель постоянного тока серии использует электромагнитный закон для преобразования электрической энергии в механическую.
Конструктивно двигатель постоянного тока серии аналогичен щеточным двигателям постоянного тока. Кроме того, он включает в себя такие компоненты, как щетки, статоры, якоря и так далее.
Плюсы
- Максимальный пусковой момент
- Обеспечивает высокий крутящий момент даже при перегрузке
- Низкое энергопотребление
Минусы
- Плохая регулировка скорости.
- Увеличение скорости приводит к уменьшению крутящего момента.
- Действует только при загрузке.
5. Двигатели постоянного тока с сердечником
медная катушка обмотки для двигателей постоянного тока
Двигатели постоянного тока с сердечником — популярный тип двигателей, используемых в промышленных машинах, используемых для крупносерийного производства.
Но это еще не все.
Двигатель постоянного тока с сердечником также поставляется с постоянными магнитами, роторами, коммутаторами, синхронными двигателями, системами привода двигателей, держателями драйверов двигателей и статорами.
Кроме того, обмотки якоря намотаны на железный сердечник и подключены к коллектору. Сердечниковые двигатели постоянного тока идеально подходят для крупномасштабных приложений, таких как автомобили, и небольших приложений, таких как игрушки.
Плюсы
- Очень экономичный
- Низковольтные двигатели
- Прочный контроллер двигателя
- Разумное управление скоростью при нескольких напряжениях
- Вы можете легко запускать, останавливать и реверсировать
Минусы
- Высокий уровень обслуживания из-за щеток
6.
Двигатель постоянного тока без сердечника набор двигателей постоянного тока без сердечника, используемых при создании дронов
Двигатель постоянного тока без сердечника очень похож на двигатель постоянного тока с сердечником. В нем также есть щетки и коллекторы, но разница заключается в обмотках ротора. Кроме того, двигатель постоянного тока без сердечника имеет сотовую конструкцию.
Двигатель постоянного тока без сердечника имеет характеристики щеточных и бесщеточных двигателей, отсюда и его разновидности. Кроме того, вы можете использовать двигатели постоянного тока без сердечника для продвинутой механики, такой как робототехника.
Pros
- Минимальный шум и вибрация при работе
- Имеет более длительный срок службы
- Может ускоряться и замедляться с высокой скоростью
- Маленький и легкий дизайн
- Высокая эффективность
Минусы
- Дороже других двигателей
- Отсутствие механизма радиатора для защиты от тепловых перегрузок
- Для идеальной работы требуется дополнительная электроника
3.
Применение двигателей постоянного тока Вы можете использовать двигатели постоянного тока для многих целей. Кроме того, электродвигатель хорошо работает при динамическом торможении и движении задним ходом, а его регулируемая скорость делает его лучшим вариантом для промышленных машин.
Вот список лучших применений двигателей постоянного тока.
- Для игрушек, инструментов и других бытовых приборов
- Поворотные столы и конвейерные ленты
- Промышленная среда
- Робототехника
- Токарные станки, дрели, формовочные станки, прядильные и ткацкие станки
- Лифты, воздушные компрессоры, краны и фены
Вкратце
Ключевым фактором при выборе двигателя постоянного тока является определение того, что лучше всего подходит для вашего проекта или приложения. Например, производитель игрушек выберет малогабаритные двигатели, а промышленно развитые фирмы выберут большие и высокомеханизированные двигатели.
В конце концов, вам следует выбрать двигатель постоянного тока, наиболее подходящий для вашей организации, учитывая различные размеры и типы двигателей постоянного тока, которые я перечислил ранее в этой статье.
Итак, эта статья призвана помочь вам выбрать наиболее подходящий двигатель постоянного тока с наилучшим сроком службы для работы.
Если вы хотите получить больше информации по этому вопросу или нашим бизнес-услугам, свяжитесь с нами!
Новые тенденции в области бесщеточных приводов постоянного тока
Бесколлекторные двигатели постоянного тока (BLDC)
получили быстрое распространение на рынке и в широком спектре приложений управления движением благодаря явным преимуществам, которые они имеют по сравнению с традиционными коллекторными двигателями постоянного тока: меньшее техническое обслуживание, более высокие рабочие скорости, компактность, меньший электрический шум, лучшее соотношение крутящего момента к весу, и это лишь некоторые из них.
1 Несмотря на эти преимущества, двигатели BLDC стоят дороже, чем традиционные двигатели постоянного тока, поскольку для них требуется контроллер привода двигателя (для электронной коммутации) и датчик положения ротора. 2 Но новые тенденции в разработке приводов двигателей постоянного тока позволяют решить не только проблему стоимости, но и обеспечивают возможности работы приводов постоянного тока, недоступные для традиционных двигателей постоянного тока. Внедрение бессенсорных электроприводов, для которых не требуется датчик обратной связи по положению ротора, является одной из новейших тенденций в конструкции электроприводов постоянного тока, которая может обеспечить экономию средств. Изменения в стратегии переключения ШИМ в моторном приводе обещают устранить проблемы, связанные с пульсациями крутящего момента. Еще одной важной тенденцией в технологии электроприводов BLDC является интеграция электродвигателя BLDC и приводной электроники в единый пакет для упрощения системы, минимизации соединительных кабелей, снижения шума и решения проблем совместимости электропривода. 3 Бездатчиковое управление
Хотя технология бездатчикового управления в первую очередь считается преимуществом экономии, она также может повысить надежность системы, уменьшить количество электрических соединений, устранить проблемы с механической центровкой, а также уменьшить размер и вес двигателя. В общем, определение бездатчикового управления — это «работа двигателя BLDC без обычно требуемого датчика положения ротора». 4 Отсутствие датчика положения ротора (например, оптического энкодера, датчика Холла, резольвера, кабелей и схемы декодирования) позволяет снизить производственные затраты при повышении надежности и долговечности. 5
В приводах двигателей постоянного тока с датчиками используется 3-фазный ШИМ-преобразователь с датчиком положения ротора для «коммутации фаз и/или управления током». 6 Однако существуют разные способы получения информации о положении ротора. В технологии бездатчикового управления «информация о положении ротора определяется путем косвенного измерения противо-ЭДС (электродвижущей силы) от одного из трех напряжений на клеммах двигателя».
7 Так как только две из трех фазных обмоток BLDC двигателя являются проводящими одновременно, третья непроводящая фаза несет заднюю частьЭДС, где положение и скорость ротора могут быть рассчитаны косвенно. 8 В настоящее время безсенсорная технология не получила широкого распространения; однако ожидается, что в будущем он станет основной методологией управления двигателем BLDC.
Уменьшение пульсаций крутящего момента
Несмотря на многие преимущества двигателей BLDC, они обладают ограничивающим фактором: тенденцией к возникновению пульсаций крутящего момента. 9 Эти пульсации могут вызывать акустический шум и вибрацию и могут «серьезно ограничивать производительность системы, особенно в приложениях с высокой точностью и высокой стабилизацией». 10 В высокоскоростных приложениях пульсации крутящего момента могут быть отфильтрованы за счет инерции нагрузки. Однако на низких скоростях, когда они наиболее заметны, пульсации крутящего момента могут сильно ограничивать производительность.
11 Пульсации крутящего момента вызваны конструкцией как двигателя BLDC, так и контроллера привода с ШИМ и включают в себя «геометрические несовершенства двигателя, неточную коммутацию, точность форм сигналов управления током, фазовые задержки, трение и магнитный гистерезис в двигателях. Их можно уменьшить за счет лучшей конструкции двигателя или использования более совершенных контроллеров приводов». 12 Пульсации крутящего момента делятся на две основные категории: зубчатый крутящий момент и коммутационный крутящий момент. «Момент зубчатого зацепления создается изменением сопротивления из-за отверстий в пазах статора при вращении ротора. Момент зубчатого зацепления можно уменьшить за счет изменений в конструкции двигателя, таких как перекос пазов статора, выбор конструкции двигателя с дробными пазами/полюсами или выбор ширины магнита относительно шага пазов». 13 Пульсации момента коммутации вызваны ШИМ-инвертором привода и обусловлены гистерезисом электрического тока или инвертором, генерирующим высокочастотные пульсации тока.
Во время коммутации «когда одна фаза отключается, другая включается, [поэтому] скорости нарастания и спада соответствующих фазных токов не эквивалентны, и, таким образом, крутящий момент, создаваемый двумя токами во время коммутации, не добавляется мгновенно к значению крутящего момента. одной полностью возбужденной фазы, что позволило бы обеспечить плавный крутящий момент в течение интервала коммутации». 14 Чтобы свести к минимуму пульсации коммутационного момента, требуются усовершенствования приводов BLDC. Существует несколько методов, используемых в конструкциях электроприводов для сведения к минимуму пульсаций коммутационного момента. Одним из способов является добавление индукторно-конденсаторных (LC) фильтров, чтобы «уменьшить высокочастотную составляющую выходного сигнала инвертора на двигатель. 15 Но ключевым фактором снижения пульсаций крутящего момента является устранение гармоник крутящего момента за счет «регулировки проводящей фазы обмоток таким образом, чтобы они соответствующим образом компенсировали».
16 Для уменьшения пульсаций крутящего момента вводятся четыре других метода: (1) использование прямого управления крутящим моментом, (2) динамическое изменение входного напряжения, (3) добавление схемы оценки крутящего момента и (4) использование искусственных нейронных сетей и активное подавление помех. 17 Встроенный двигатель и привод BLDC
Встроенный двигатель и привод BLDC — одна из новейших тенденций, которая обещает снижение затрат, надежность и компактность. Ожидается, что в будущем интегрированные мотор-приводы BLDC станут рыночным стандартом. В 2010 году количество интегрированных двигателей постоянного тока BLDC выросло на 47,7%, и они быстро заменяют серводвигатели переменного тока. Это изменение является результатом «растущего числа бесщеточных встроенных двигателей постоянного тока, [поставляемых] с расширенной обратной связью. Кроме того, с 2009 года ожидается совокупный годовой темп роста (CAGR) на 11,6% для встроенных двигателей BLDC с контролем положения.
до 2015 года». 18 Интеграция электродвигателя и приводной электроники является результатом двух новых разработок: (1) повышается эффективность электронных компонентов, что приводит к уменьшению размера силовой электроники 19 и (2) постоянное использование редкоземельных элементов магниты двигателя BLDC устраняют источник тепла на роторе, поэтому «повышение внутренней температуры меньше, чем у традиционных двигателей постоянного тока, что позволяет установить инверторное управление в двигатель». 20 В настоящее время мощность встроенных двигателей постоянного тока и приводов составляет 100 Вт. 21 Но по мере увеличения рынка и размера интегрированных двигателей BLDC они упрощают установку моторного привода и устраняют необходимость в диспетчерских инверторах, вентиляционном оборудовании и кабелях между двигателем и инверторами. 22 Цифровые сигнальные процессоры
Для реализации большинства новых тенденций в области электроприводов постоянного тока, упомянутых в этой статье, требуется высокопроизводительный контроллер с высокоскоростным микропроцессором и технология программируемого логического контроллера (ПЛК) высокой плотности.
23 Называемые «цифровыми сигнальными процессорами» (DSP), эти высокопроизводительные контроллеры быстро внедряются на рынке, что привело к их неуклонному падению в цене. Даже недорогие DSP могут «выполнять сложные алгоритмы для улучшения характеристик двигателя в таких областях, как контроль шума, регулируемая скорость, энергоэффективность». 24 В прошлом базовые цифровые контроллеры с 8-разрядным микроконтроллером имели достаточную полосу пропускания для базового управления скоростью. «Но по мере того, как сложность алгоритмов управления двигателем [возрастала] [ред.], также возрастала потребность в более высокой производительности и большем количестве программируемых решений. DSP обеспечивают большую часть пропускной способности и программируемости, необходимых для таких приложений». 25 В частности, использование полосы пропускания недорогого DSP реализует следующие функции:- Пропорционально-интегрально-дифференциальное (ПИД) управление для большей точности
- Алгоритмы без датчиков для устранения дорогостоящих датчиков скорости и тока
- Случайная широтно-импульсная модуляция (ШИМ) для уменьшения шума и размеров входного фильтра
- Алгоритмы компенсации пульсаций для уменьшения емкости конденсатора звена постоянного тока привода
- Коррекция коэффициента мощности (PFC) для устранения специального контроллера PFC
Возможно, самыми большими долгосрочными преимуществами DSP являются стандартизация интерфейса привода, полная цифровизация системы привода и более простые средства «передачи данных с верхним уровнем и системами дистанционного управления, которые облегчают мониторинг и диагностику системные сбои».
26 - Дж. Дэвид Ирвин. Справочник по промышленной электронике. CRC Press, 1997. Стр. 752. ↩
- Хамид А. Толият и Джеральд Б. Климан. Справочник по электродвигателям. CRC Press, 2004. Стр. 763. ↩ 9.0048
- Чан-лян Ся. Приводы и средства управления бесщеточными двигателями постоянного тока с постоянными магнитами. John Wiley & Sons, 2012. Стр. 15. ↩
- Дж. Али Эмади. Справочник по автомобильной силовой электронике и моторным приводам. CRC Press, 2005. Стр. 535. ↩
- Дж. Али Эмади. Справочник по автомобильной силовой электронике и моторным приводам. CRC Press, 2005. Стр. 535. ↩
- Гуй-Цзя Су и Джон В. МакКивер. Недорогое бессенсорное управление бесщеточными двигателями постоянного тока с улучшенным диапазоном скоростей. Окриджская национальная лаборатория, Национальный центр транспортных исследований, 2001 г. Стр. 1. ↩
- С.Джошува, Э.Сатишкумар и С.Рамсанкар. Усовершенствованный метод определения положения ротора для бессенсорного управления двигателем BLDC. Международный журнал мягких вычислений и инженерии (IJSCE) ISSN: 2231-2307, том-2, выпуск-1, март 2012 г. Страница 1. ↩
- Пол Кеттл, Энгус Мюррей и Финбарр Мойнихан. Бездатчиковое управление бесщеточным двигателем постоянного тока с использованием расширенной оценки Калмана, Analog Devices, Motion Control Group, Intelligent Motion PCIM’98. Материалы за май 1998 г. Страница 385. ↩
- Тимофей Львович Скваренин. Справочник по силовой электронике. CRC Press, 2002. Стр. 10-11. ↩
- Чан-лян Ся. Приводы и средства управления бесщеточными двигателями постоянного тока с постоянными магнитами. John Wiley & Sons, 2012. Страница 5.0. ↩
- Тимофей Львович Скваренин. Справочник по силовой электронике. CRC Press, 2002. Стр. 10-11. ↩
- Фаршад Хоррами, Прашант Кришнамурти и Хемант Мелкоте. Моделирование и адаптивное нелинейное управление электродвигателями. Springer, 2003. Стр. 383. ↩
- Тимофей Львович Скваренина. Справочник по силовой электронике. CRC Press, 2002. Стр. 10-11. ↩
- Али Эмади. Справочник по автомобильной силовой электронике и моторным приводам. CRC Press, 2005. Стр. 524. ↩
- Вину В. Дас, Джанахаллал Стивен и Несси Танкачан. Силовая электроника и приборостроение:
Международная конференция, PEIE 2010. Springer, 2011. Стр. 53.
↩
- Чан-лян Ся. Приводы и средства управления бесщеточными двигателями постоянного тока с постоянными магнитами. John Wiley & Sons, 2012. Стр. 11. ↩
- Чан-лян Ся. Приводы и средства управления бесщеточными двигателями постоянного тока с постоянными магнитами. John Wiley & Sons, 2012. Стр. 11. ↩
- Дженелия Хауэлл. Интегрированные бесщеточные двигатели постоянного тока становятся основными конкурентами двигателей переменного тока со встроенными сервоприводами. Блог IMS Research Analyst, 2012. ↩
- Петр Вас. Электрические машины и приводы на основе искусственного интеллекта. Oxford University Press, 1999. Стр. 14. ↩
- Чан-лян Ся.
.
.
.
.
.
.
.
.
- Пример:
- Механические размеры
 Он сообщает производственному персоналу и машинам, какая степень точности и точности требуется для каждой контролируемой функции детали.
Он сообщает производственному персоналу и машинам, какая степень точности и точности требуется для каждой контролируемой функции детали.
 Электрическое сопротивление имеет некоторые концептуальные параллели с механическим понятием трения. Единицей электрического сопротивления в системе СИ является ом (Ом)
Электрическое сопротивление имеет некоторые концептуальные параллели с механическим понятием трения. Единицей электрического сопротивления в системе СИ является ом (Ом) . Эти три испытания различаются величиной приложенного напряжения и величиной (или характером) допустимого тока:
. Эти три испытания различаются величиной приложенного напряжения и величиной (или характером) допустимого тока: Ток утечки должен быть ниже заданного предела, иначе испытание считается не пройденным. Это испытание является неразрушающим при условии, что оно не дает сбоев, и обычно требуется, чтобы агентства по безопасности выполняли его как 100-процентное испытание на производственной линии для всех продуктов, прежде чем они покинут завод.
Ток утечки должен быть ниже заданного предела, иначе испытание считается не пройденным. Это испытание является неразрушающим при условии, что оно не дает сбоев, и обычно требуется, чтобы агентства по безопасности выполняли его как 100-процентное испытание на производственной линии для всех продуктов, прежде чем они покинут завод. Только испытание импульсным напряжением может непосредственно обнаружить обмотки статора с поврежденной изоляцией витков. При подаче высокого напряжения между витками этот тест является испытанием на перенапряжение для изоляции витков и может привести к повреждению изоляции, что потребует шунтирования неисправной катушки, замены или перемотки.
Только испытание импульсным напряжением может непосредственно обнаружить обмотки статора с поврежденной изоляцией витков. При подаче высокого напряжения между витками этот тест является испытанием на перенапряжение для изоляции витков и может привести к повреждению изоляции, что потребует шунтирования неисправной катушки, замены или перемотки. Он публикуется Радиотехнической комиссией по аэронавтике (RTCA, Inc.)
Он публикуется Радиотехнической комиссией по аэронавтике (RTCA, Inc.) Не помогает и то, что клиенты начинают свой выбор электроники (старая отправная точка), пробираясь через лабиринт огромных размеров; Ассортимент продукции для MOSFET, IGBT и драйверов затворов.
Не помогает и то, что клиенты начинают свой выбор электроники (старая отправная точка), пробираясь через лабиринт огромных размеров; Ассортимент продукции для MOSFET, IGBT и драйверов затворов. Типичный двигатель BLDC использует постоянные магниты на роторе и три обмотки якоря (U, V, W) на статоре. Микроконтроллер (MCU) реализует одну из множества схем управления и модуляции (трапециевидная, синусоидальная, FOC с SVM, DTC и т. д.) для стратегической подачи питания на обмотки двигателя. Это создает электромагнитные поля, вызывающие взаимодействующую силу между магнитами ротора и обмотками статора. При правильном выполнении это взаимодействие позволяет точно контролировать скорость, крутящий момент или мощность двигателя в нужном направлении.
Типичный двигатель BLDC использует постоянные магниты на роторе и три обмотки якоря (U, V, W) на статоре. Микроконтроллер (MCU) реализует одну из множества схем управления и модуляции (трапециевидная, синусоидальная, FOC с SVM, DTC и т. д.) для стратегической подачи питания на обмотки двигателя. Это создает электромагнитные поля, вызывающие взаимодействующую силу между магнитами ротора и обмотками статора. При правильном выполнении это взаимодействие позволяет точно контролировать скорость, крутящий момент или мощность двигателя в нужном направлении. Обычно это N-канальные МОП-транзисторы, рассчитанные на 1,5–2,0-кратное напряжение двигателя, до ~ 300 В. При напряжении выше 300 В N-канальные МОП-транзисторы обычно заменяют IGBT из-за их более высокой мощности.
Обычно это N-канальные МОП-транзисторы, рассчитанные на 1,5–2,0-кратное напряжение двигателя, до ~ 300 В. При напряжении выше 300 В N-канальные МОП-транзисторы обычно заменяют IGBT из-за их более высокой мощности.
 3).
3).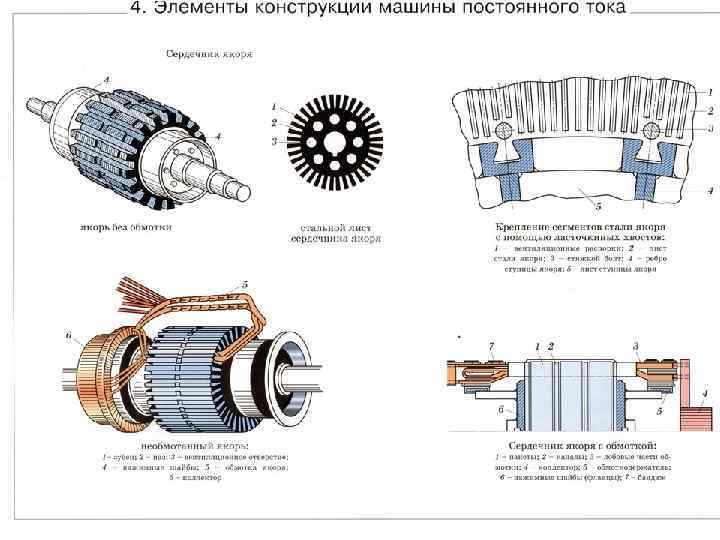
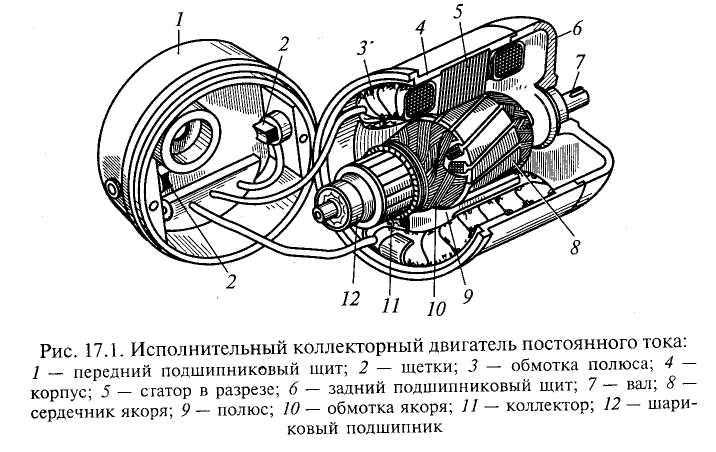 Время выключения (нс). Мы выбрали 50 нс вкл/выкл для N-FET и 200 нс для IGBT.
Время выключения (нс). Мы выбрали 50 нс вкл/выкл для N-FET и 200 нс для IGBT.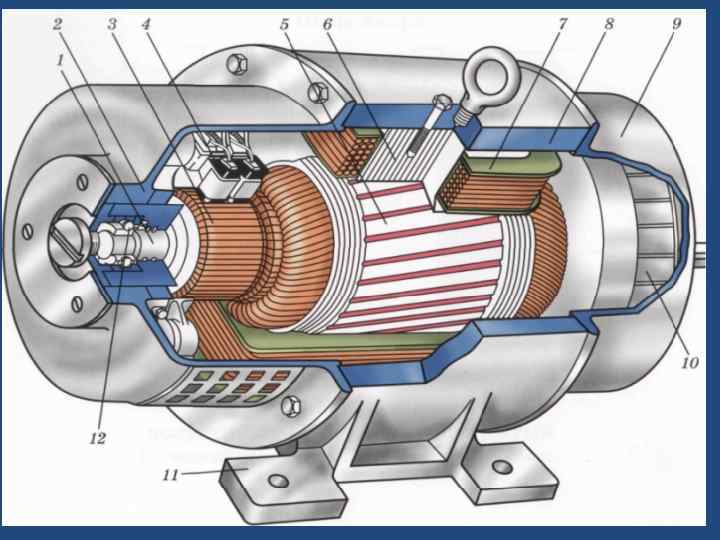
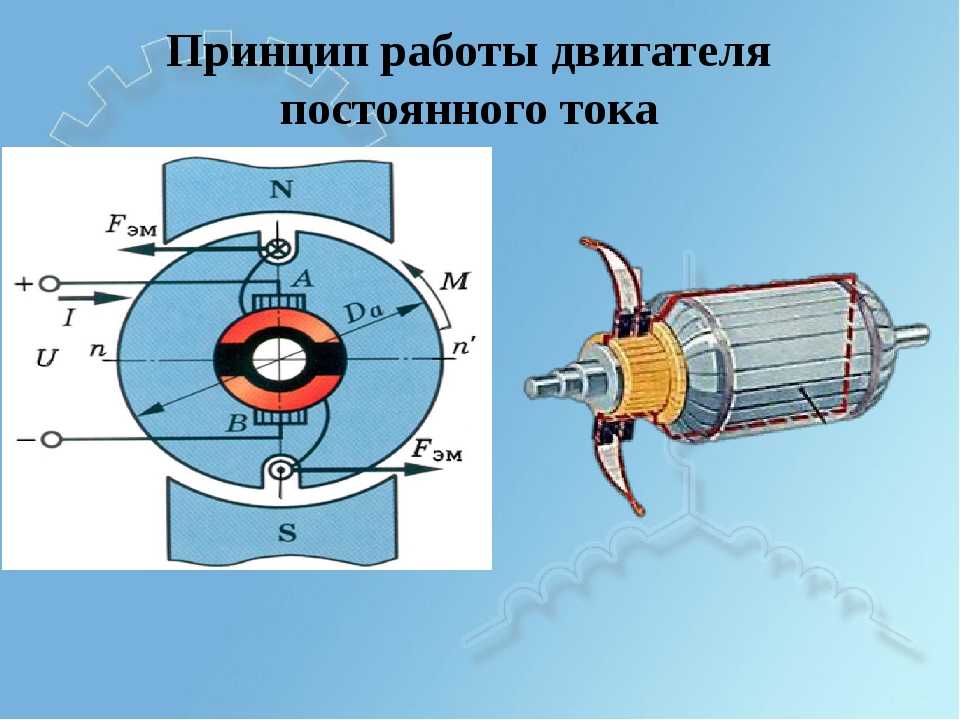
 Непрерывная работа двигателей постоянного тока обычно доступна в диапазоне скоростей 8:1. Неограниченный диапазон (плавное регулирование до нулевой скорости) на короткое время или при уменьшенной нагрузке также является обычным явлением.
Непрерывная работа двигателей постоянного тока обычно доступна в диапазоне скоростей 8:1. Неограниченный диапазон (плавное регулирование до нулевой скорости) на короткое время или при уменьшенной нагрузке также является обычным явлением.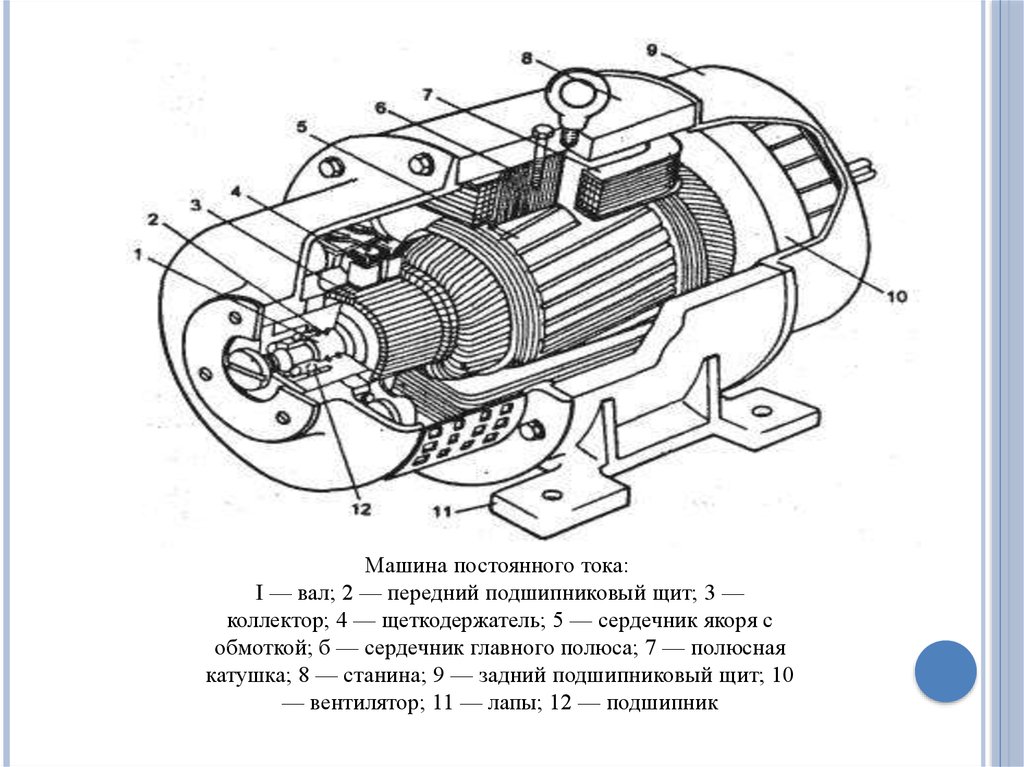 А двигатели постоянного тока быстро реагируют на изменения управляющих сигналов благодаря высокому отношению крутящего момента к моменту инерции.
А двигатели постоянного тока быстро реагируют на изменения управляющих сигналов благодаря высокому отношению крутящего момента к моменту инерции.
 Специальные двигатели имеют более широкий диапазон скоростей, но если диапазон скоростей значительно превышает 3:1, по крайней мере, для части диапазона используется какой-либо другой метод управления.
Специальные двигатели имеют более широкий диапазон скоростей, но если диапазон скоростей значительно превышает 3:1, по крайней мере, для части диапазона используется какой-либо другой метод управления.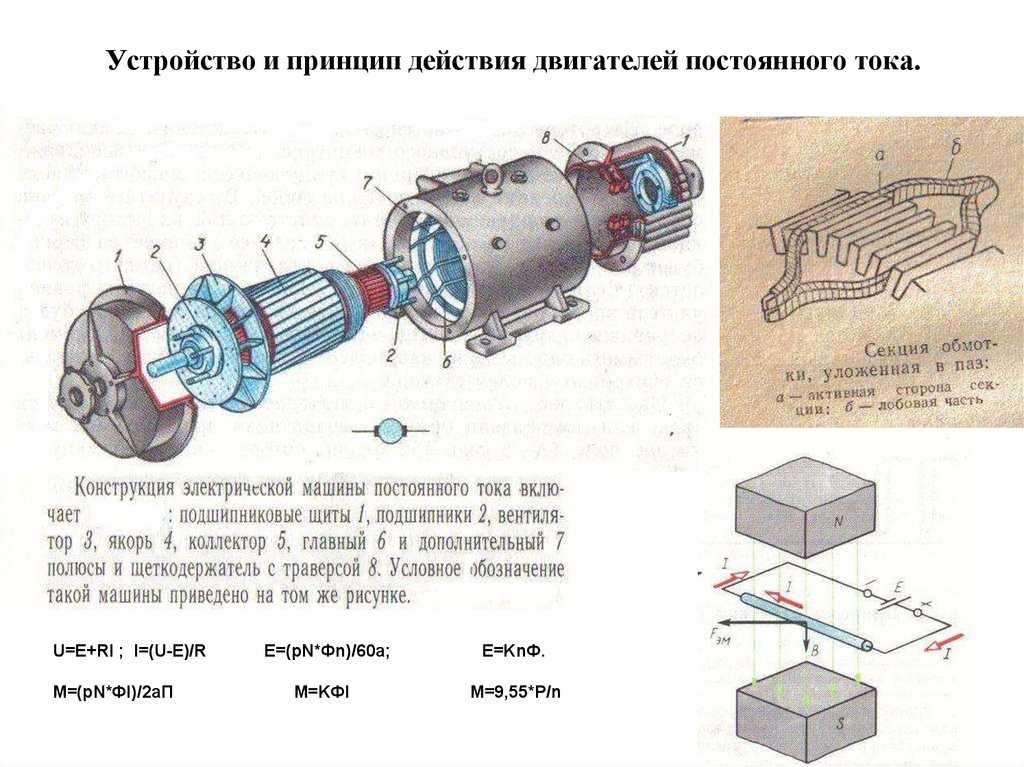
 Или источник питания с падающей вольт-амперной характеристикой можно использовать с двигателем с параллельной обмоткой.
Или источник питания с падающей вольт-амперной характеристикой можно использовать с двигателем с параллельной обмоткой. Следовательно, пиковый крутящий момент зависит от продолжительности и частоты возникновения перегрузки. Пиковый крутящий момент часто ограничивается максимальным током, который может обеспечить источник питания.
Следовательно, пиковый крутящий момент зависит от продолжительности и частоты возникновения перегрузки. Пиковый крутящий момент часто ограничивается максимальным током, который может обеспечить источник питания.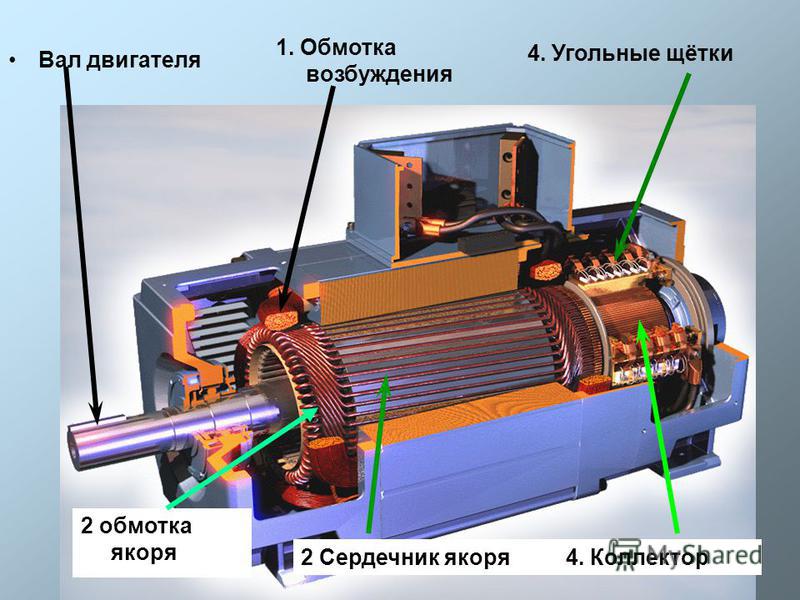
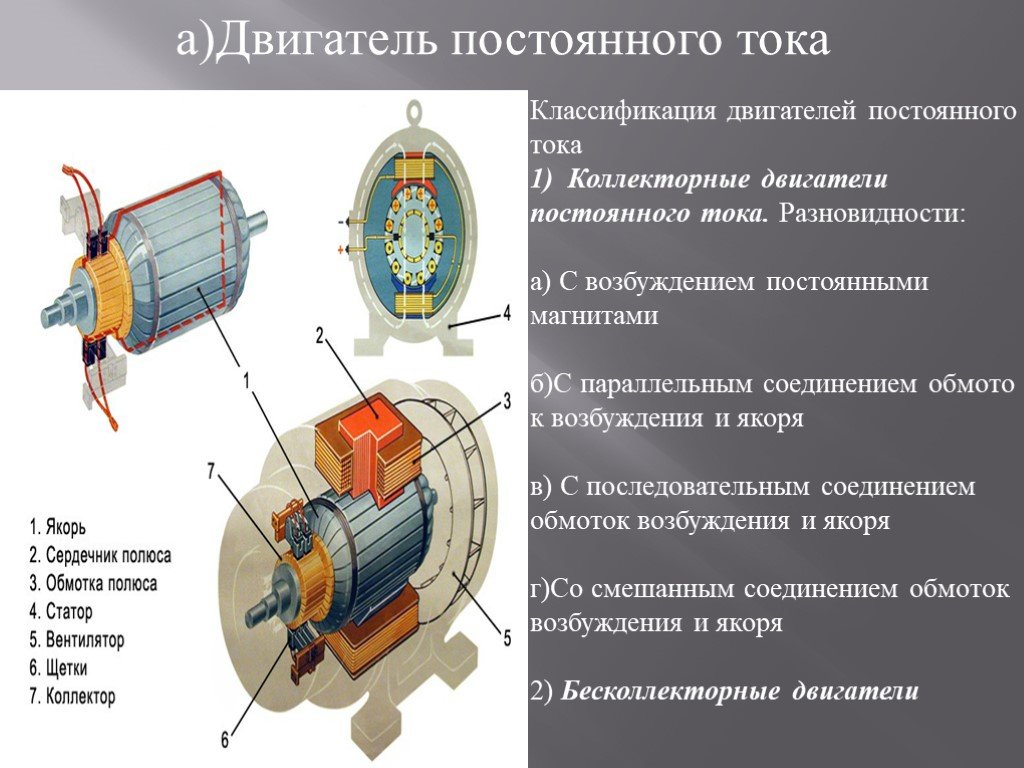 Вот где мы вступаем. Кроме того, эта статья расскажет вам, что вам нужно знать о двигателях постоянного тока, о том, как они работают, их типах и различных областях применения.
Вот где мы вступаем. Кроме того, эта статья расскажет вам, что вам нужно знать о двигателях постоянного тока, о том, как они работают, их типах и различных областях применения. Кроме того, двигатели постоянного тока могут различаться по мощности и размеру — от маленьких, как двигатели, приводящие в движение игрушки, до больших, как механизмы, приводящие в движение лифты и транспортные средства.
Кроме того, двигатели постоянного тока могут различаться по мощности и размеру — от маленьких, как двигатели, приводящие в движение игрушки, до больших, как механизмы, приводящие в движение лифты и транспортные средства.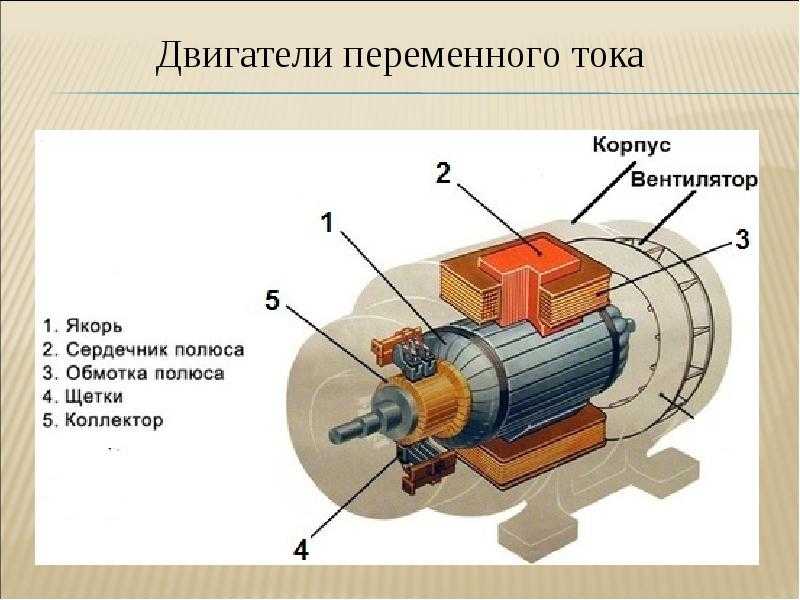 2. Каков основной принцип работы двигателя постоянного тока
2. Каков основной принцип работы двигателя постоянного тока 

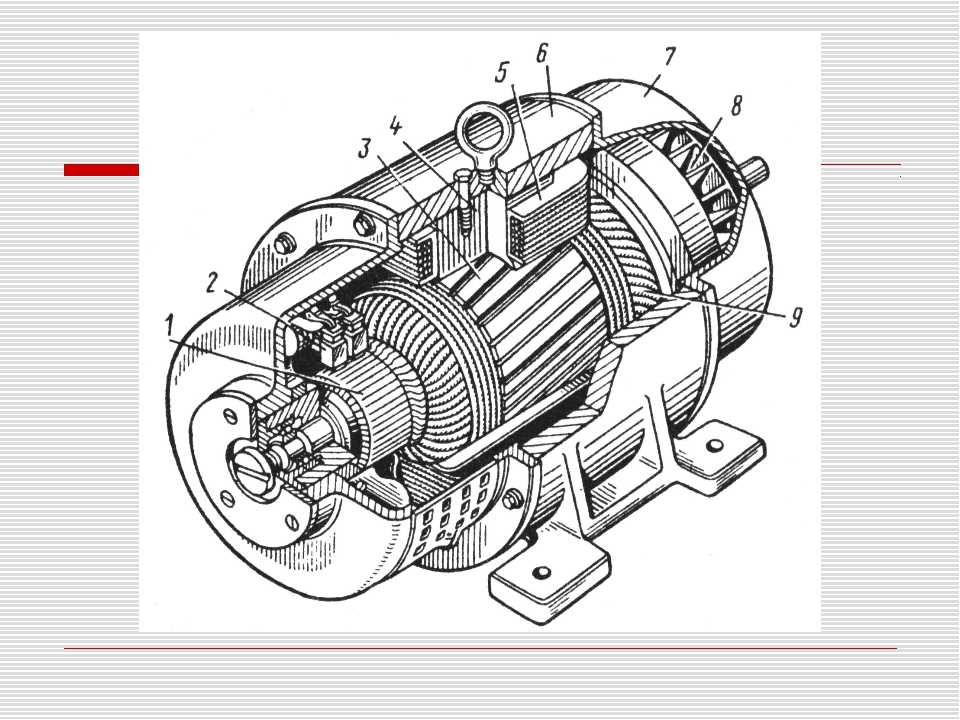 Шунтирующие двигатели постоянного тока
Шунтирующие двигатели постоянного тока  Двигатели постоянного тока серии
Двигатели постоянного тока серии 
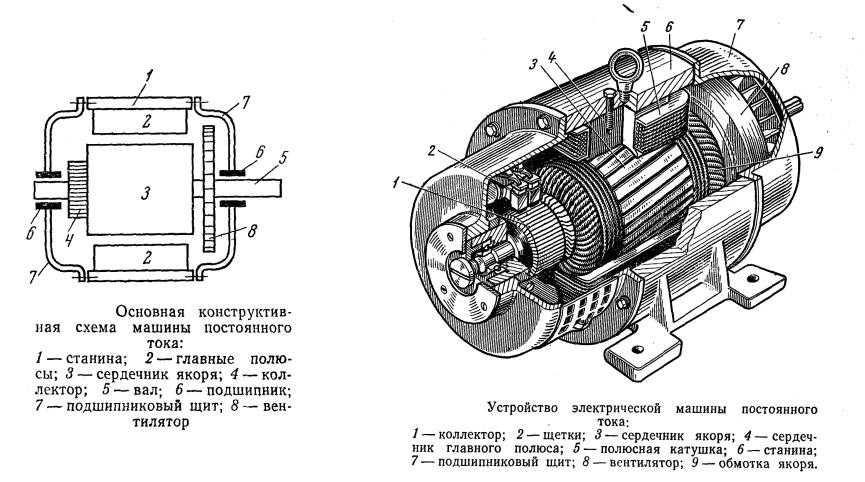 Двигатель постоянного тока без сердечника
Двигатель постоянного тока без сердечника 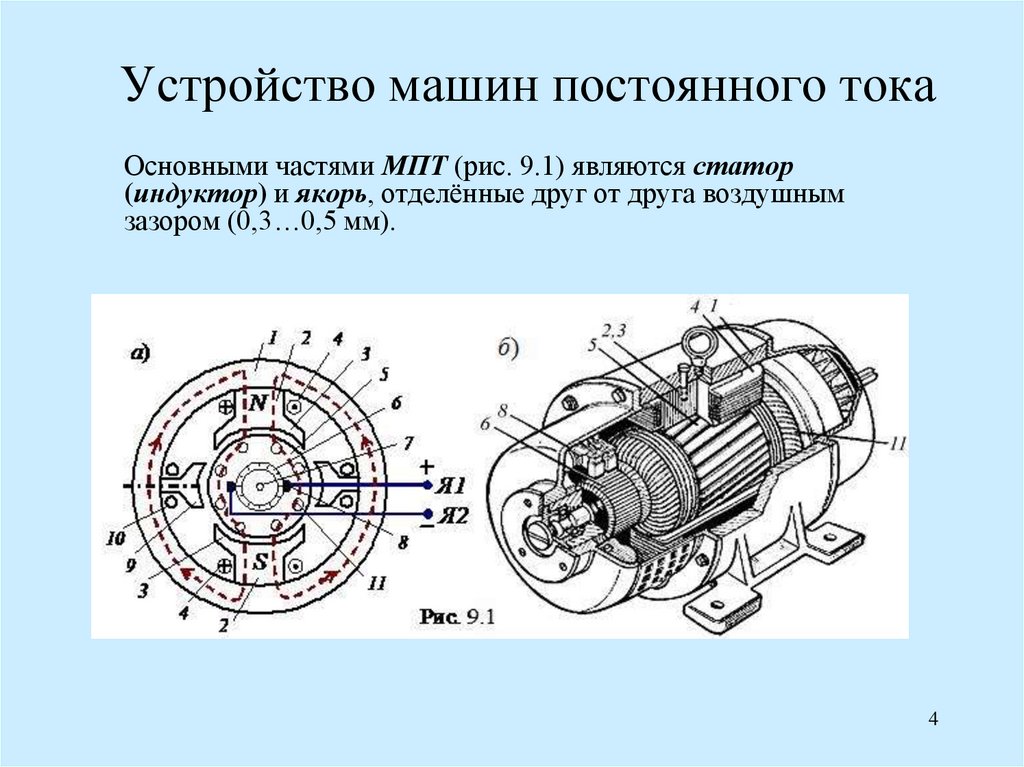 Применение двигателей постоянного тока
Применение двигателей постоянного тока 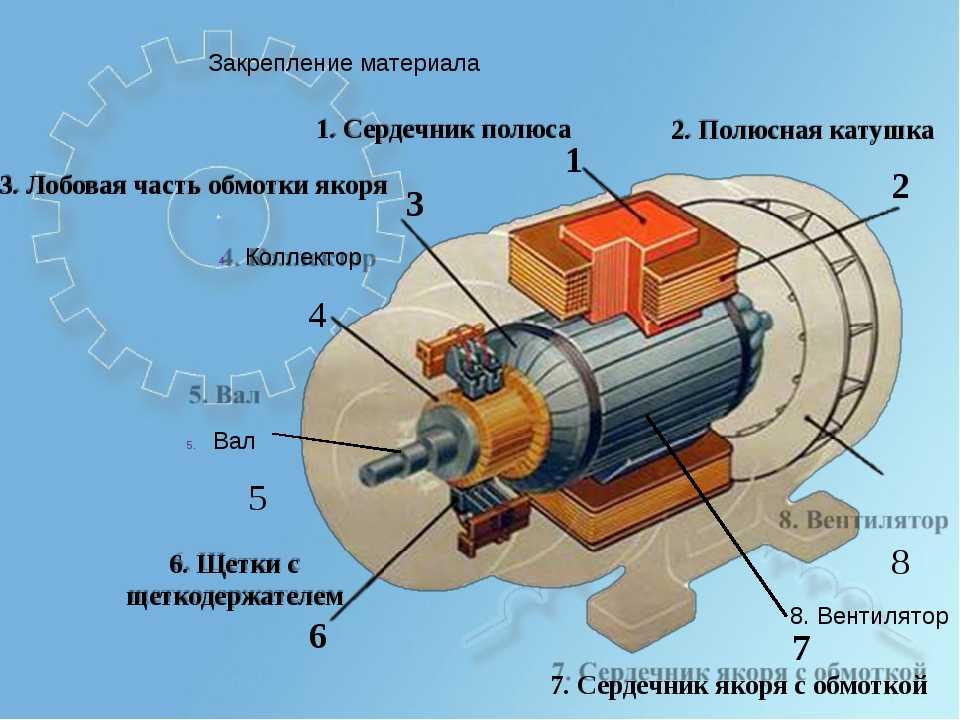
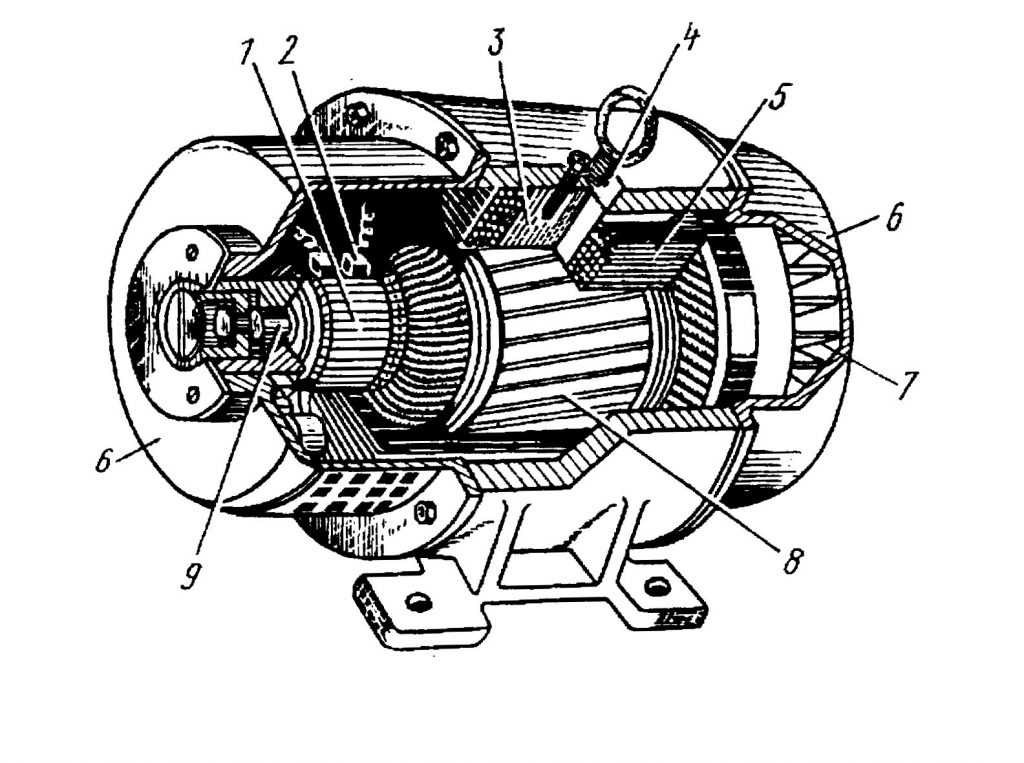 1 Несмотря на эти преимущества, двигатели BLDC стоят дороже, чем традиционные двигатели постоянного тока, поскольку для них требуется контроллер привода двигателя (для электронной коммутации) и датчик положения ротора. 2 Но новые тенденции в разработке приводов двигателей постоянного тока позволяют решить не только проблему стоимости, но и обеспечивают возможности работы приводов постоянного тока, недоступные для традиционных двигателей постоянного тока. Внедрение бессенсорных электроприводов, для которых не требуется датчик обратной связи по положению ротора, является одной из новейших тенденций в конструкции электроприводов постоянного тока, которая может обеспечить экономию средств. Изменения в стратегии переключения ШИМ в моторном приводе обещают устранить проблемы, связанные с пульсациями крутящего момента. Еще одной важной тенденцией в технологии электроприводов BLDC является интеграция электродвигателя BLDC и приводной электроники в единый пакет для упрощения системы, минимизации соединительных кабелей, снижения шума и решения проблем совместимости электропривода.
1 Несмотря на эти преимущества, двигатели BLDC стоят дороже, чем традиционные двигатели постоянного тока, поскольку для них требуется контроллер привода двигателя (для электронной коммутации) и датчик положения ротора. 2 Но новые тенденции в разработке приводов двигателей постоянного тока позволяют решить не только проблему стоимости, но и обеспечивают возможности работы приводов постоянного тока, недоступные для традиционных двигателей постоянного тока. Внедрение бессенсорных электроприводов, для которых не требуется датчик обратной связи по положению ротора, является одной из новейших тенденций в конструкции электроприводов постоянного тока, которая может обеспечить экономию средств. Изменения в стратегии переключения ШИМ в моторном приводе обещают устранить проблемы, связанные с пульсациями крутящего момента. Еще одной важной тенденцией в технологии электроприводов BLDC является интеграция электродвигателя BLDC и приводной электроники в единый пакет для упрощения системы, минимизации соединительных кабелей, снижения шума и решения проблем совместимости электропривода. 3
3  7 Так как только две из трех фазных обмоток BLDC двигателя являются проводящими одновременно, третья непроводящая фаза несет заднюю часть
7 Так как только две из трех фазных обмоток BLDC двигателя являются проводящими одновременно, третья непроводящая фаза несет заднюю часть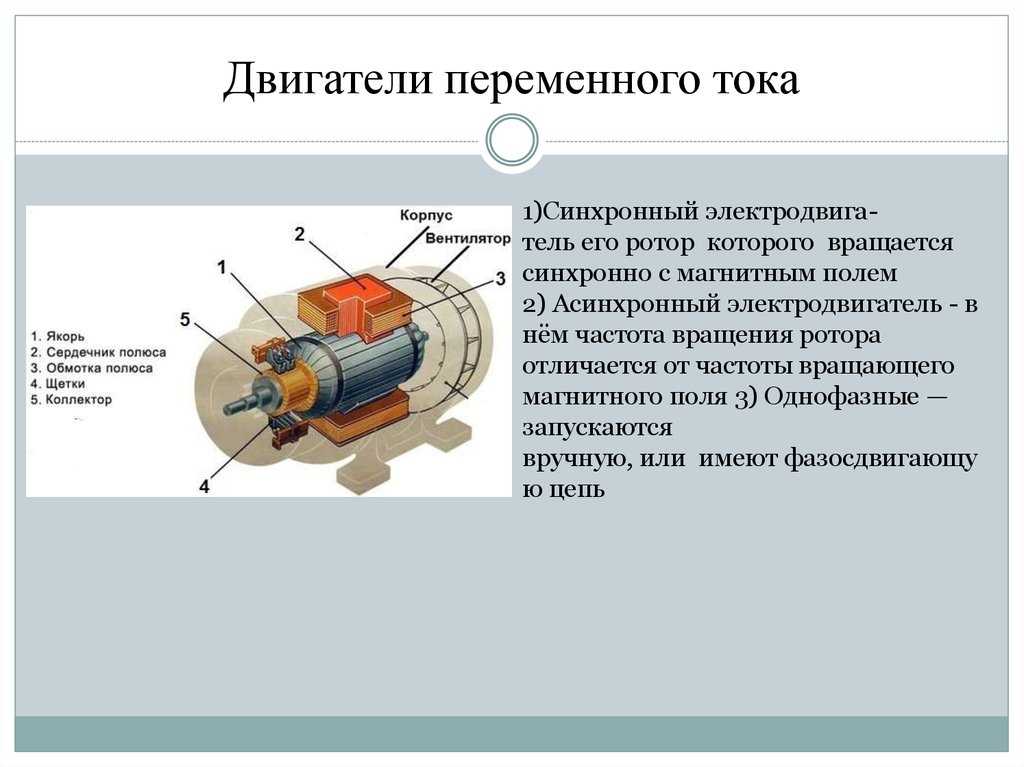 11 Пульсации крутящего момента вызваны конструкцией как двигателя BLDC, так и контроллера привода с ШИМ и включают в себя «геометрические несовершенства двигателя, неточную коммутацию, точность форм сигналов управления током, фазовые задержки, трение и магнитный гистерезис в двигателях. Их можно уменьшить за счет лучшей конструкции двигателя или использования более совершенных контроллеров приводов». 12
11 Пульсации крутящего момента вызваны конструкцией как двигателя BLDC, так и контроллера привода с ШИМ и включают в себя «геометрические несовершенства двигателя, неточную коммутацию, точность форм сигналов управления током, фазовые задержки, трение и магнитный гистерезис в двигателях. Их можно уменьшить за счет лучшей конструкции двигателя или использования более совершенных контроллеров приводов». 12 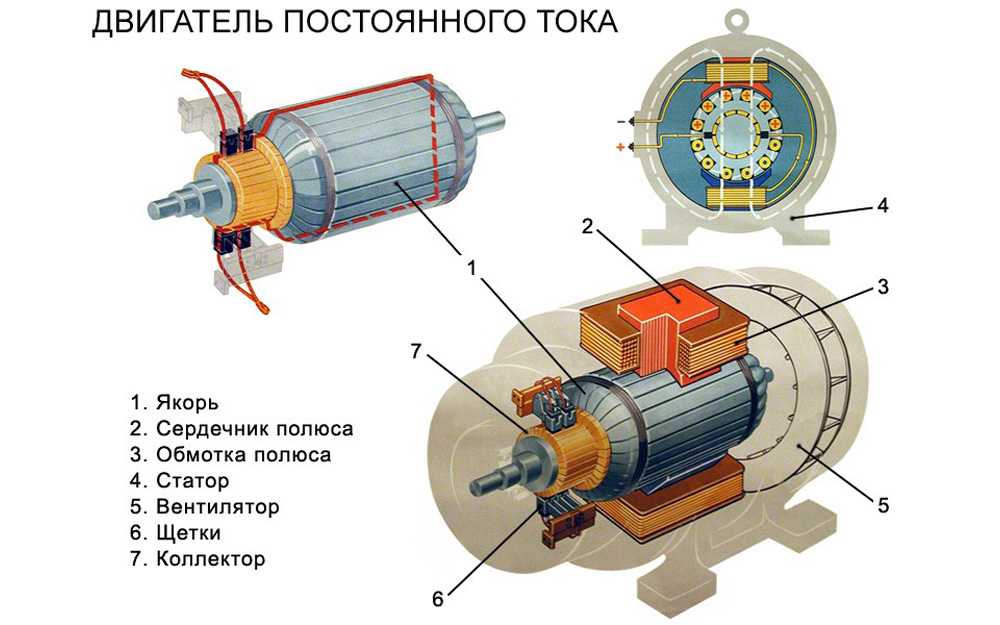 Во время коммутации «когда одна фаза отключается, другая включается, [поэтому] скорости нарастания и спада соответствующих фазных токов не эквивалентны, и, таким образом, крутящий момент, создаваемый двумя токами во время коммутации, не добавляется мгновенно к значению крутящего момента. одной полностью возбужденной фазы, что позволило бы обеспечить плавный крутящий момент в течение интервала коммутации». 14
Во время коммутации «когда одна фаза отключается, другая включается, [поэтому] скорости нарастания и спада соответствующих фазных токов не эквивалентны, и, таким образом, крутящий момент, создаваемый двумя токами во время коммутации, не добавляется мгновенно к значению крутящего момента. одной полностью возбужденной фазы, что позволило бы обеспечить плавный крутящий момент в течение интервала коммутации». 14 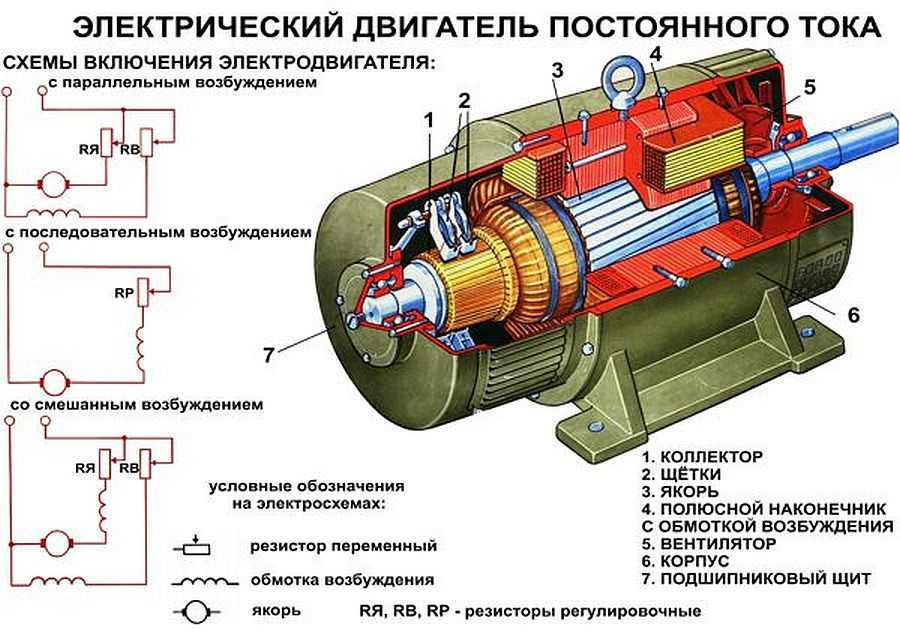 16 Для уменьшения пульсаций крутящего момента вводятся четыре других метода: (1) использование прямого управления крутящим моментом, (2) динамическое изменение входного напряжения, (3) добавление схемы оценки крутящего момента и (4) использование искусственных нейронных сетей и активное подавление помех. 17
16 Для уменьшения пульсаций крутящего момента вводятся четыре других метода: (1) использование прямого управления крутящим моментом, (2) динамическое изменение входного напряжения, (3) добавление схемы оценки крутящего момента и (4) использование искусственных нейронных сетей и активное подавление помех. 17  до 2015 года». 18 Интеграция электродвигателя и приводной электроники является результатом двух новых разработок: (1) повышается эффективность электронных компонентов, что приводит к уменьшению размера силовой электроники 19 и (2) постоянное использование редкоземельных элементов магниты двигателя BLDC устраняют источник тепла на роторе, поэтому «повышение внутренней температуры меньше, чем у традиционных двигателей постоянного тока, что позволяет установить инверторное управление в двигатель». 20 В настоящее время мощность встроенных двигателей постоянного тока и приводов составляет 100 Вт. 21 Но по мере увеличения рынка и размера интегрированных двигателей BLDC они упрощают установку моторного привода и устраняют необходимость в диспетчерских инверторах, вентиляционном оборудовании и кабелях между двигателем и инверторами. 22
до 2015 года». 18 Интеграция электродвигателя и приводной электроники является результатом двух новых разработок: (1) повышается эффективность электронных компонентов, что приводит к уменьшению размера силовой электроники 19 и (2) постоянное использование редкоземельных элементов магниты двигателя BLDC устраняют источник тепла на роторе, поэтому «повышение внутренней температуры меньше, чем у традиционных двигателей постоянного тока, что позволяет установить инверторное управление в двигатель». 20 В настоящее время мощность встроенных двигателей постоянного тока и приводов составляет 100 Вт. 21 Но по мере увеличения рынка и размера интегрированных двигателей BLDC они упрощают установку моторного привода и устраняют необходимость в диспетчерских инверторах, вентиляционном оборудовании и кабелях между двигателем и инверторами. 22 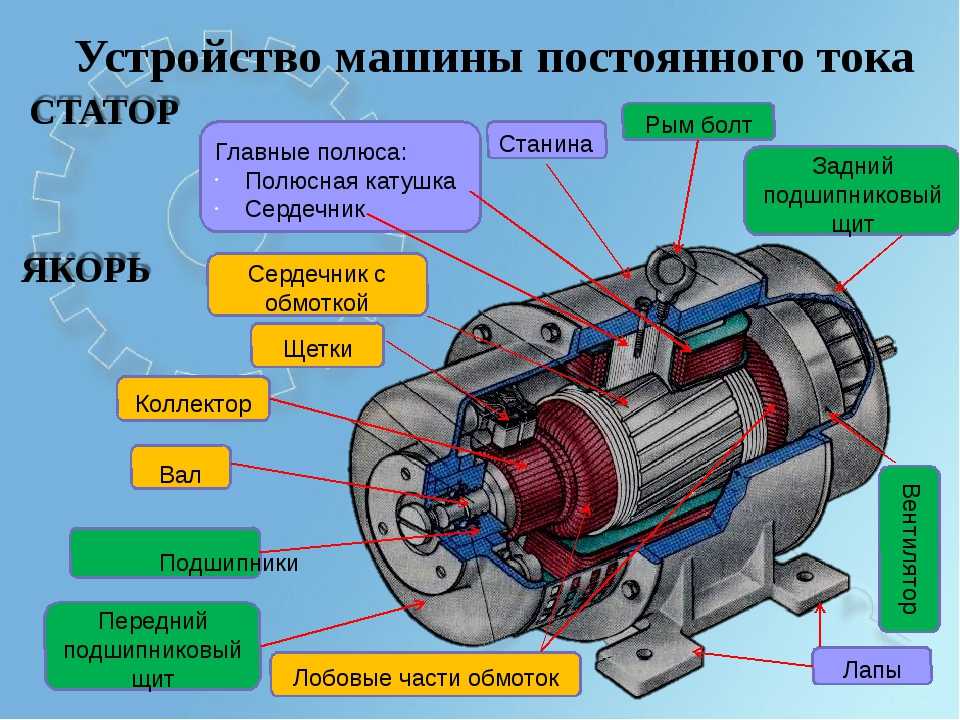 23 Называемые «цифровыми сигнальными процессорами» (DSP), эти высокопроизводительные контроллеры быстро внедряются на рынке, что привело к их неуклонному падению в цене. Даже недорогие DSP могут «выполнять сложные алгоритмы для улучшения характеристик двигателя в таких областях, как контроль шума, регулируемая скорость, энергоэффективность». 24 В прошлом базовые цифровые контроллеры с 8-разрядным микроконтроллером имели достаточную полосу пропускания для базового управления скоростью. «Но по мере того, как сложность алгоритмов управления двигателем [возрастала] [ред.], также возрастала потребность в более высокой производительности и большем количестве программируемых решений. DSP обеспечивают большую часть пропускной способности и программируемости, необходимых для таких приложений». 25 В частности, использование полосы пропускания недорогого DSP реализует следующие функции:
23 Называемые «цифровыми сигнальными процессорами» (DSP), эти высокопроизводительные контроллеры быстро внедряются на рынке, что привело к их неуклонному падению в цене. Даже недорогие DSP могут «выполнять сложные алгоритмы для улучшения характеристик двигателя в таких областях, как контроль шума, регулируемая скорость, энергоэффективность». 24 В прошлом базовые цифровые контроллеры с 8-разрядным микроконтроллером имели достаточную полосу пропускания для базового управления скоростью. «Но по мере того, как сложность алгоритмов управления двигателем [возрастала] [ред.], также возрастала потребность в более высокой производительности и большем количестве программируемых решений. DSP обеспечивают большую часть пропускной способности и программируемости, необходимых для таких приложений». 25 В частности, использование полосы пропускания недорогого DSP реализует следующие функции: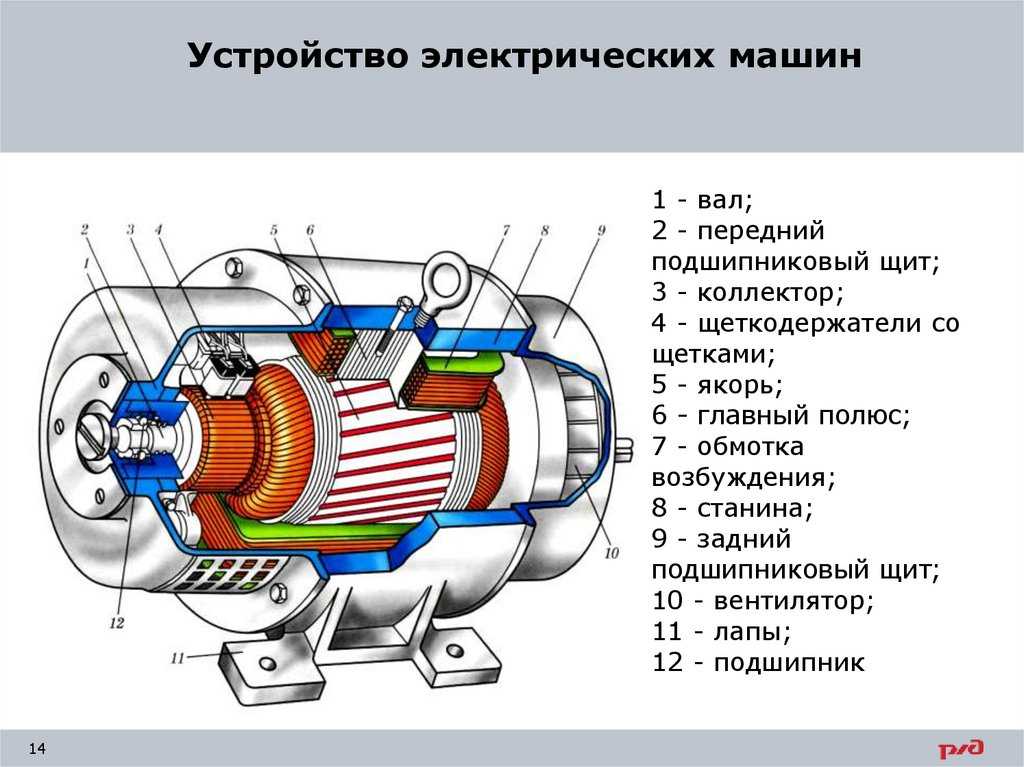 26
26 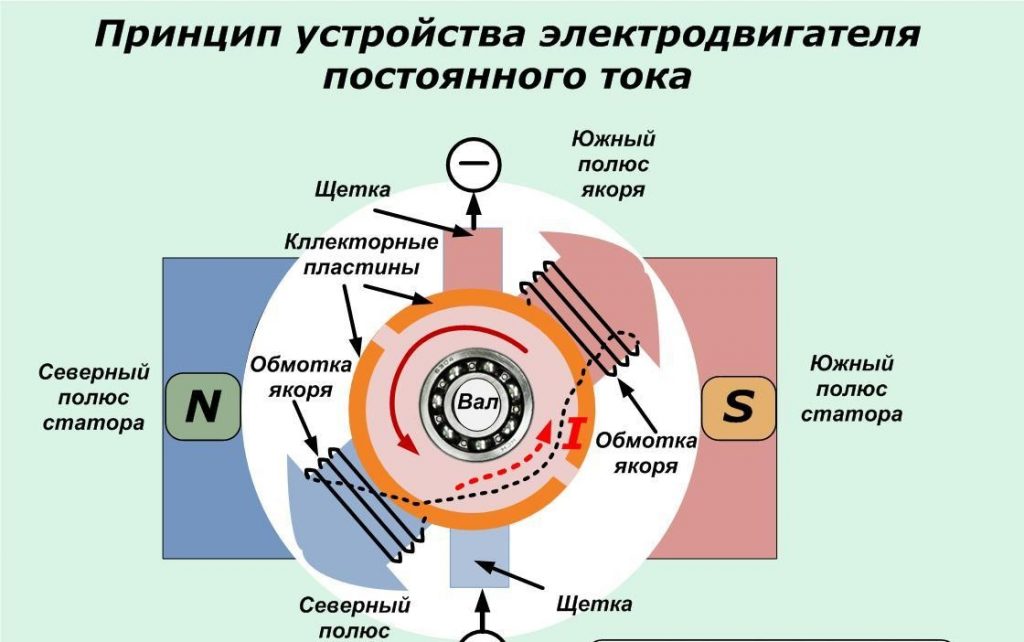 Международный журнал мягких вычислений и инженерии (IJSCE) ISSN: 2231-2307, том-2, выпуск-1, март 2012 г. Страница 1. ↩
Международный журнал мягких вычислений и инженерии (IJSCE) ISSN: 2231-2307, том-2, выпуск-1, март 2012 г. Страница 1. ↩ CRC Press, 2002. Стр. 10-11. ↩
CRC Press, 2002. Стр. 10-11. ↩