Содержание
В современных электроприборах может применяться коллекторный и бесколлекторный двигатель, отличия которых заключаются в конструкции.
Содержание
- 1 Устройство коллекторного мотора
- 1.1 Преимущества и недостатки
- 2 Особенности конструкции бесколлекторных двигателей
- 2.1 Преимущества и недостатки
- 3 Сравнение типов двигателей
Электродвигателем называется узел, преобразующий электрическую энергию в механическую. Тип конструкции каждого мотора спроектирован с учетом потребностей того или иного оборудования.
Различные механизмы и автоматические системы прочно вошли в жизнь человека. Питаемые электроэнергией, приборы и агрегаты используют для работы один из типов главного узла, которым может быть коллекторный и бесколлекторный двигатель. Отличия этих устройств по большей части заключаются в конструкции и особенностях эксплуатации, проистекающие из этих особенностей сборки.
Определить, какой двигатель в конкретном случае будет лучше, можно путем изучения свойств прибора-потребителя. Также поможет прямое сравнение технических характеристик разных моделей двигателей. Например, если нужно установить мотор в систему с низкой нагрузкой и высокой скоростью вращения, подойдет коллекторный двигатель в конфигурации для переменного тока. Это может быть питание радиоуправляемой модели или маломощный бытовой прибор. Большинство современных систем используют преимущества бесколлекторного двигателя.
Также поможет прямое сравнение технических характеристик разных моделей двигателей. Например, если нужно установить мотор в систему с низкой нагрузкой и высокой скоростью вращения, подойдет коллекторный двигатель в конфигурации для переменного тока. Это может быть питание радиоуправляемой модели или маломощный бытовой прибор. Большинство современных систем используют преимущества бесколлекторного двигателя.
Устройство коллекторного мотора
В данных устройствах роторный датчик и переключатель тока представлены одним узлом. Выбирая, коллекторный или бесколлекторный двигатель ставить в прибор, стоит помнить, что через коллекторный узел обеспечивается более качественное соединение электрических цепей внутри мотора. Это основное, чем отличается коллекторный двигатель от бесколлекторного.
Эти электроприводы являются простыми в использовании и техническом обслуживании. Однако у них есть особенность: при сравнительно низком весе они выдают большой КПД, что накладывает необходимость в использовании редуктора, так как уровень быстроходности мешает нормальной работе. Попытка снизить скорость вращения ротора приведет к потере производительности. Кроме того, на малых оборотах этот мотор начнет перегреваться. Если это недопустимо, рекомендуется замена коллекторного двигателя на бесколлекторный для повышения эффективности работы агрегата.
Попытка снизить скорость вращения ротора приведет к потере производительности. Кроме того, на малых оборотах этот мотор начнет перегреваться. Если это недопустимо, рекомендуется замена коллекторного двигателя на бесколлекторный для повышения эффективности работы агрегата.
Чтобы понять, чем отличаются коллекторные двигатели от бесколлекторных, зачастую достаточно обратить внимание на сферу использования. Коллекторный мотор можно встретить повсюду, где применяются электроинструменты, бытовые приборы с большой скоростью вращения и бытовая техника. Стабильно функционируя как на переменном, так и постоянном токе, коллекторный двигатель обеспечивает небольшой прирост массы агрегата и не занимает много места в корпусе.
Простейший двигатель коллекторного типа состоит из нескольких базовых компонентов:
- трехполюсный ротор, установленный в корпусе посредством подшипников скольжения особой конструкции;
- двухполюсный статор, относящийся к категории оснащенных постоянными магнитами.
 Эти элементы имеют изогнутую форму и соответствуют конфигурации статора;
Эти элементы имеют изогнутую форму и соответствуют конфигурации статора; - медные пластины играют роль щеток в компактных моделях коллекторных двигателей. Как правило, в большинстве разновидностей щетки выполняются из графита.
 Эти элементы имеют изогнутую форму и соответствуют конфигурации статора;
Эти элементы имеют изогнутую форму и соответствуют конфигурации статора;Эти три составные части являются основой концепции двигателя с минимальными мощностными характеристиками (обычно используются в детских игрушках). Более производительные вариации, такие как в электроинструменте, включают в себя:
- коллектор;
- якорь;
- индуктор;
- статор и ротор с увеличенным числом полюсов и пр.
Коллекторные и бесколлекторные двигатели могут иметь измененную конструкцию в зависимости от поставленных перед ними задач. При этом принцип их действия остается прежним; меняются только выходные характеристики. Определить, в чем разница между ними, можно путем изучения условий эксплуатации, а также свойств источника энергии и характера нагрузки.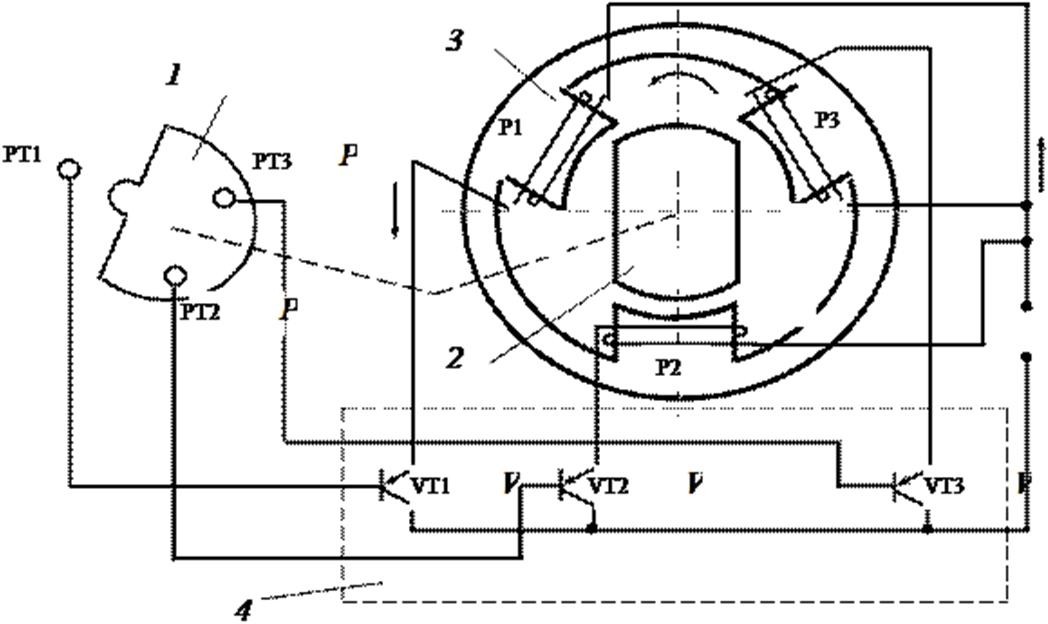
Преимущества и недостатки
Несмотря на свою распространенность и универсальность, применение коллекторного двигателя обосновано не всегда. Иногда более рациональным выбором станет именно бесколлекторный узел запуска.
Выгодные стороны коллекторных моторов:
- пусковой ток может иметь малую силу и напряжение, что незаменимо в бытовой технике, которая не может создавать мощные импульсы;
- есть возможность подключения двигателя непосредственно к источнику энергии, в роли которого выступает общая сеть. При этом нет потребности в использовании частотного преобразователя и другой периферии;
- быстроходность;
- работа на постоянном или переменном токе;
- совместимость с различными схемами управления вращением.
Чаще всего коллекторный мотор кажется полностью универсальным, однако у него есть и недостатки:
- эти двигатели не отличаются надежностью из-за наличия компонентов, подверженных быстрому расходу своей прочности: например, постоянно прилегающие к коллектору щетки на высоких скоростях могут начать искрить и оставлять продукты износа;
- малая продолжительность работы между сеансами технического обслуживания;
- производительность всегда является сниженной в отличие от бесколлекторного двигателя. Это происходит из-за индукционных явлений в моторе и расхода энергии для перемагничивания обмоток статора;
- крутящий момент остается сравнительно низким даже в современных моделях, что бывает критично для работы электроинструментов.
 Это происходит из-за индукционных явлений в моторе и расхода энергии для перемагничивания обмоток статора;
Это происходит из-за индукционных явлений в моторе и расхода энергии для перемагничивания обмоток статора;Коллекторным двигателем удобно управлять, задавая обороты до 10 тысяч в минуту. Однако бесколлекторные разновидности также могут предложить ряд выгодных преимуществ.
Особенности конструкции бесколлекторных двигателей
Сравнение двух конкурирующих концепций позволяет заметить, что по своей сути коллекторная и бесколлекторная конструкции полностью друг от друга отличаются. Разница прослеживается уже при изучении внутреннего устройства:
- отсутствуют щетки и коллектор – главные детали в коллекторном двигателе;
- магниты расположены вокруг вала, взяв на себя функции и задачи ротора;
- оснащенная магнитными полюсами обмотка находится вокруг роторной системы;
- ротор оборудован датчиком положения вала, который связан с управляющим процессором.

Бесколлекторный двигатель имеет несколько периферийных электронных систем, облегчающих управление работой и контролем состояния. Центральным узлом является процессор, который работает параллельно с системой изменения скорости и обменивается с ним информацией примерно 100 раз за минуту. Эта связка позволяет обеспечить более плавную работу мотора с одновременным извлечением максимального КПД.
При этом наличие второстепенных электросетей не является обязательным. Бесколлекторный двигатель не потеряет работоспособности при отключении массива датчиков и управляющих систем. Однако выведение из строя периферии негативно отразится на общем уровне производительности.
Чтобы определить наличие датчика положения ротора, нужно обратить внимание на количество питающих проводов. В стандартной конструкции их должно быть три; если присутствует сенсор, к трем основным линиям добавится шлейф, собранный из тонкой проводки и идущий от двигателя к регулятору вращения.
Преимущества и недостатки
Отсутствие щеток позиционирует эти двигатели как практически неспособные изнашиваться.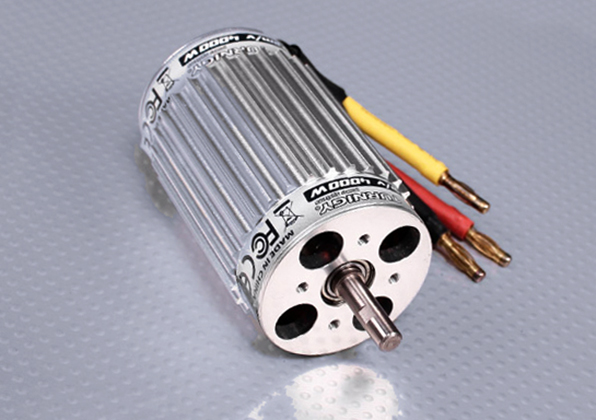 Подверженными износу точками остаются подшипники, однако их замена проводится достаточно редко, а при установке усиленной модели срок эксплуатации дополнительно увеличится. Наличие датчика положения вала повышает точность управления работой двигателя и его производительность.
Подверженными износу точками остаются подшипники, однако их замена проводится достаточно редко, а при установке усиленной модели срок эксплуатации дополнительно увеличится. Наличие датчика положения вала повышает точность управления работой двигателя и его производительность.
Щеточный массив, используемый в коллекторных двигателях, генерирует большие объемы продуктов износа, что влияет на уровень создаваемых при работе помех, а также увеличивает степень искрения. Конструкция бесколлекторного мотора эффективно устраняет эти проблемы.
В процессе работы под нагрузкой бесколлекторный электродвигатель не создает повышенное трение деталей, отсутствует риск перегрузки узлов, что является весомым преимуществом. В конструкции нет легко изнашивающихся компонентов, что позволяет проводить техническое обслуживание не чаще, чем предписано производителем двигателя.
Единственный наблюдаемый недостаток – ощутимая стоимость бесколлекторного мотора. Однако стоит принимать во внимание отсутствие потребности в частой замене отдельных деталей, таких как коллектор, щетки, пружины либо якорь целиком. Поэтому данный недостаток является условным.
Поэтому данный недостаток является условным.
Сравнение типов двигателей
Оборудованные коллектором движущие агрегаты повсеместно применяются в изготовлении игрушек, а также автомобилестроении, производстве бытовой техники и электрического инструментария. Это обусловлено следующим:
- низкая стоимость;
- легкость управления вращением;
- адаптация к непосредственному подключению в сеть;
- широкий диапазон скоростей;
- запуск на малом импульсе.
Кажущаяся несложной эксплуатация характерна также рядом недочетов:
- общая ненадежность двигателя;
- потребность в частом техническом вмешательстве, в частности замене быстро изнашивающихся деталей;
- малый срок эксплуатации до полной замены двигателя;
- низкая производительность.
Выгодные стороны установки в агрегат бесколлекторного двигателя превосходят таковые у конкурента, оснащенного щетками:
- крайне быстрый разгон;
- применение в агрессивной среде ввиду отсутствия источника искр;
- значительно больший срок службы;
- корпус двигателя может быть рабочим органом;
- минимальные потери мощности.
Что касается недостатков бесколлекторного двигателя, здесь их всего два – высокая цена и необходимость применения второстепенных систем для подключения и управления, таких как драйверы-коммутаторы. Эти устройства меняют скорость, направление вращения и общий режим работы.
Какой тип электродвигателя лучше всего подходит для моего проекта?
Добавлено 4 июля 2019 в 15:20
Узнайте, какие проекты лучше всего работают с коллекторными двигателями постоянного тока, бесколлекторными двигателями, серводвигателями и шаговыми двигателями.
Если вы разрабатываете проекты с движущимися частями, скорее всего, вам понадобится электродвигатель. Но существует несколько различных типов электродвигателей, обычно доступных разработчикам.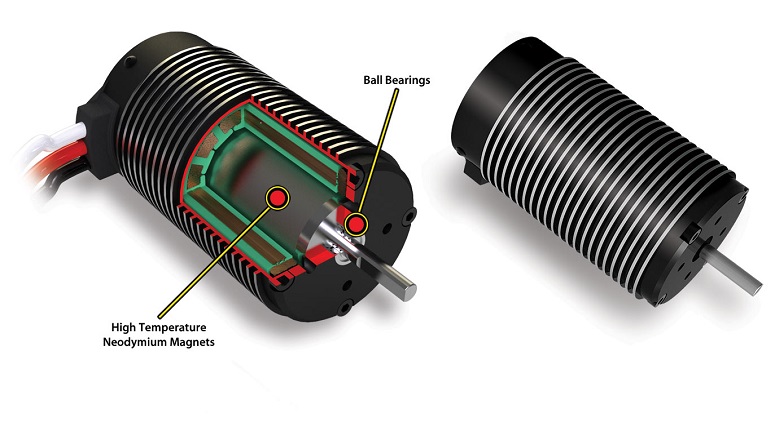
Коллекторные двигатели постоянного тока, бесколлекторные двигатели, серводвигатели и шаговые двигатели – это четыре наиболее распространенных типа электродвигателей, которые можно найти практически в любом проекте, в котором есть движение. Использование каждого из этих типов двигателей в вашем проекте имеет свой набор преимуществ и потенциальных проблем.
В данной статье рассматриваются типы проектов, для которых хорошо подходит тот или иной тип двигателя, и приводятся базовые рейтинги стоимости, крутящего момента, максимальной скорости и точности позиционирования по шкале от 0 до 5.
Коллекторный двигатель постоянного тока
Коллекторные двигатели постоянного тока являются самыми дешевыми, простыми и легкими в управлении из всех технологий двигателей, обсуждаемых в данной статье. Они идеально подходят для проектов с ограниченным бюджетом, которые не требую какого-либо точного управления позиционированием, и для которых отношение мощность/масса не очень важно.
Оценка характеристик коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока также полезны для проектов, требующих чрезвычайно простого управления.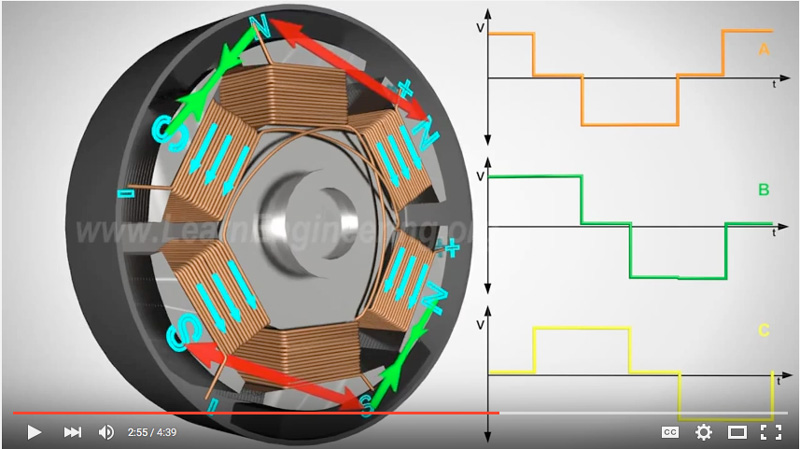 Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа. Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер.
Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа. Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер.
Пример коллекторного двигателя постоянного тока, используемого в проекте
Лучшие типы проектов для коллекторных двигателей постоянного тока
Наборы для создания роботов для начинающих
Наборы для создания роботов для начинающих почти повсеместно используют коллекторные двигатели постоянного тока из-за их низкой стоимости и потому, что для их работы не требуются современные микроконтроллеры или сложное программирование.
Используя два двигателя с двумя колесами на каждой стороне шасси робота, мы можете создать достаточно сложного робота. Многие из базовых наборов робототехники такого типа доступны в магазинах.
Конструкции, использующие вибромоторы
Вибромоторы состоят из коллекторного двигателя постоянного тока с грузом, прикрепленным асимметрично к валу двигателя. Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Из-за простоты управления коллекторными двигателями постоянного тока интенсивность вибрации можно модулировать, просто регулируя напряжение, подаваемое на двигатель.
Бесколлекторные двигатели
Несмотря на то, что бесколлекторные двигатели начинают заменять коллекторные двигатели постоянного тока в профессиональных устройствах и электромобилях, они также приобретают популярность в самодельных проектах благодаря наличию мощных, но доступных по цене микроконтроллеров.
Оценка характеристик бесколлекторных двигателейПара примеров бесколлекторных двигателей
Бесколлекторные двигатели обеспечивают большую надежность, более высокие максимальные скорости и более высокую эффективность по сравнению с коллекторными двигателями постоянного тока. Однако они дороже, чем коллекторные двигатели постоянного тока, особенно с учетом того, что им требуются специализированные контроллеры скорости для взаимодействия с микроконтроллерами, что иногда может быть дороже, чем сам двигатель.
Зачастую стоимость управления бесколлекторным двигателем превышает стоимость самого двигателя
Лучшие типы проектов для бесколлекторных двигателей
Любительские проекты летательных аппаратов
Бесколлекторные двигатели чрезвычайно полезны в любительских проектах летательных аппаратов, включая квадрокоптеры, вертолеты и самолеты.
Более высокая эффективность бесколлекторных двигателей, по сравнению с коллекторными двигателями постоянного тока, имеет два основных последствия для проектов радиоуправляемых летательных аппаратов:
- Бесколлекторные двигатели потребляют меньше энергии для выработки той же мощности, что и коллекторный двигатель постоянного тока примерно такого же размера, что означает, что разработчики получают больше энергии от того же аккумулятора.
- Бесколлекторные двигатели имеют боле высокую выходную мощность при том же размере двигателя. В частности, для летательных аппаратов отношение мощности к весу является критически важной характеристикой, и бесколлекторные двигатели полезны для увеличения этого отношения.
Бесколлекторные двигатели являются хорошим выбором для любительских проектов летательных аппаратов
Радиоуправляемые машины
Радиоуправляемые машины, особенно те, которые используются для гонок, также выигрывают от технологий бесколлекторных двигателей. Более высокое отношение мощности к весу полезно в радиоуправляемых машинах по той же причине, что и для летательных аппаратов, для повышения производительности.
Для радиоуправляемых машин бесколлекторные двигатели обеспечивают большие крутящий момент и максимальные скорости, чем бензиновые двигатели. Кроме того, бесколлекторные двигатели в радиоуправляемых машинах обеспечивают пиковый крутящий момент почти мгновенно при подаче питания. Бензиновые двигатели, напротив, должны развивать более высокие скорости, чтобы максимизировать крутящий момент.
Стабилизатор камеры
Если вы записываете видео своего проекта, очень полезным инструментом для повышения профессионализма ваших видео за счет уменьшения тряски может стать стабилизатор камеры.
Стабилизатор камеры – это устройство, которое поддерживает камеру неподвижно, обеспечивая более плавные кадры. Стабилизаторы выполняют это, компенсируя движение, используя три бесколлекторных двигателя, по одному на каждую ось движения.
Стабилизируйте камеру с помощью стабилизатора, состоящего из трех бесколлекторных двигателей
Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.
Оценка характеристик серводвигателей
Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
Примеры использования серводвигателей в проектах
Лучшие типы проектов для серводвигателей
Шагающий робот
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.
В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.
Это робот-манипулятор uArm Metal, работающий на сервоприводах
Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Шаговые двигатели
Шаговые двигатели, как и серводвигатели, предназначены для построения машин, требующих точных управления и отслеживания позиционирования.
Оценка характеристик шаговых двигателей
То, как шаговые двигатели позволяют управлять позиционированием, сильно отличается от способа, используемого сервоприводами. Серводвигатели имеют возможности абсолютного позиционирования. В любой момент микроконтроллер может сделать запрос контроллеру сервопривода и получить назад значение угла.
Шаговый двигатель, напротив, использует относительное позиционирование. Шаговые двигатели вращаются не непрерывно (как коллекторные двигатели постоянного тока или бесколлекторные двигатели), а дискретными «шагами»,
Типовой шаговый двигатель имеет 200 шагов на полный оборот. Таким образом, каждый раз, когда шаговый двигатель «делает шаг», он поворачивается на 1,8°. Тщательно отслеживая количество шагов, на которое шаговый двигатель повернулся из известного начального положения, микроконтроллер может с высокой степенью точности определять положение двигателя или всего, что к нему прикреплено.
Примеры использования шаговых двигателей в проектах
Лучшие типы проектов для шаговых двигателей
3D принтеры
Шаговые двигатели используются практически во всех настольных 3D принтерах.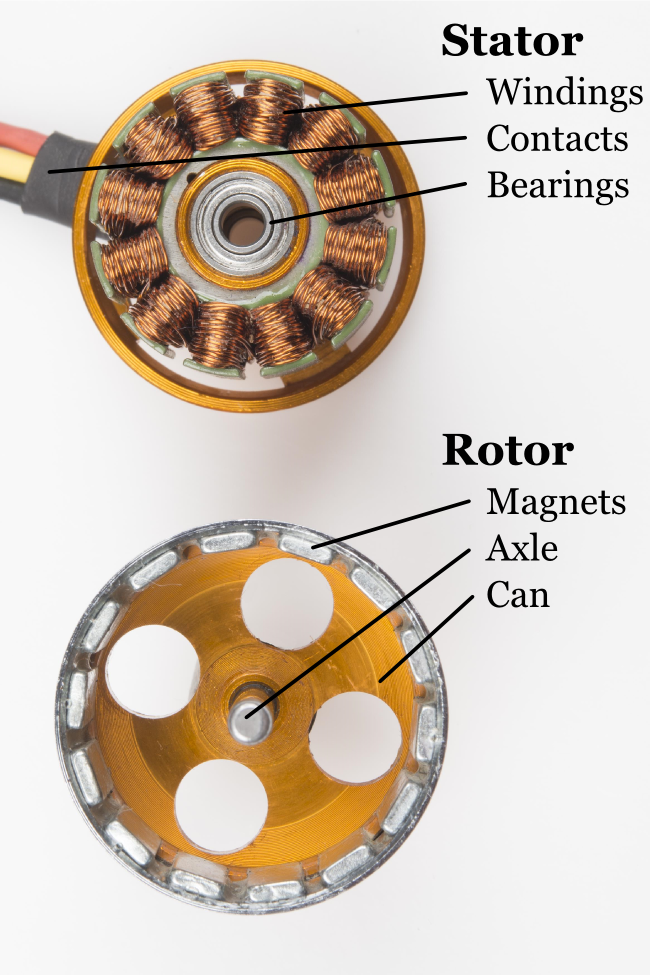 Эта технология двигателей позволяет контроллерам 3D принтеров отслеживать положение печатающей головки с точностью до минуты (обычно в масштабе микрометров). Кроме того, шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях, что полезно для перемещения тяжелого экструдера вокруг рабочей области.
Эта технология двигателей позволяет контроллерам 3D принтеров отслеживать положение печатающей головки с точностью до минуты (обычно в масштабе микрометров). Кроме того, шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях, что полезно для перемещения тяжелого экструдера вокруг рабочей области.
3D принтеры используют шаговые двигатели для отслеживания положения печатающей головки
Станки ЧПУ
По причинам, аналогичным 3D принтерам, шаговые двигатели широко используются в станках ЧПУ. Станок с ЧПУ запускает задание с известной нулевой позиции. Контроллер подсчитывает количество шагов, на которое перемещаются двигатели, переводя их в расстояния в соответствие с конструкцией ремней, которыми управляют шаговые двигатели. Этот тип отслеживания положения обеспечивает высокий уровень точности размеров обрабатываемых станком ЧПУ деталей.
Большие роботы-манипуляторы
В предыдущем разделе объяснялось, как в более мелких роботах манипуляторах используются серводвигатели.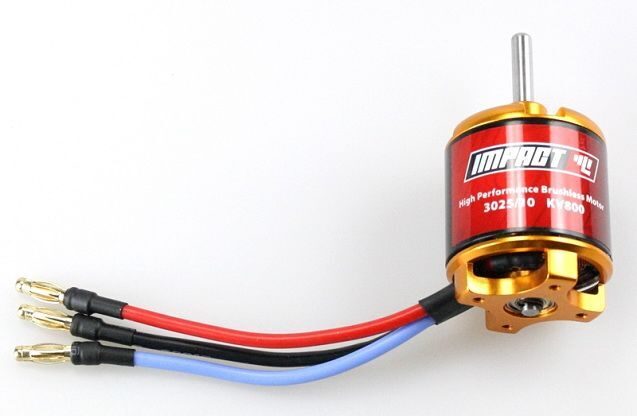 В более крупных роботах манипуляторах часто используются шаговые двигатели. Таким образом, если вы разрабатываете робота-манипулятора, который должен будет перемещать тяжелые грузы, дополнительный крутящий момент больших шаговых двигателей по сравнению с крутящим моментом, обеспечиваемым серводвигателями, позволит вашему роботу-манипулятору поднимать и перемещать гораздо более тяжелые объекты.
В более крупных роботах манипуляторах часто используются шаговые двигатели. Таким образом, если вы разрабатываете робота-манипулятора, который должен будет перемещать тяжелые грузы, дополнительный крутящий момент больших шаговых двигателей по сравнению с крутящим моментом, обеспечиваемым серводвигателями, позволит вашему роботу-манипулятору поднимать и перемещать гораздо более тяжелые объекты.
Шаговые двигатели хорошо работают в больших роботах-манипуляторах, которые требуют возможности подъема более тяжелых объектов
Оригинал статьи:
- Scott Hatfield. What Type of Motor is Best for My Project?
Теги
Бесколлекторный двигательДвигательДвигатель постоянного токаКоллекторный двигатель постоянного токаШаговый двигательЭлектродвигатель
Разница между щеточными и бесщеточными двигателями
– Progressive Automations
Ежедневно машины и орудия в нашем окружении часто используют щеточные и бесщеточные двигатели постоянного тока для обеспечения вращательного движения.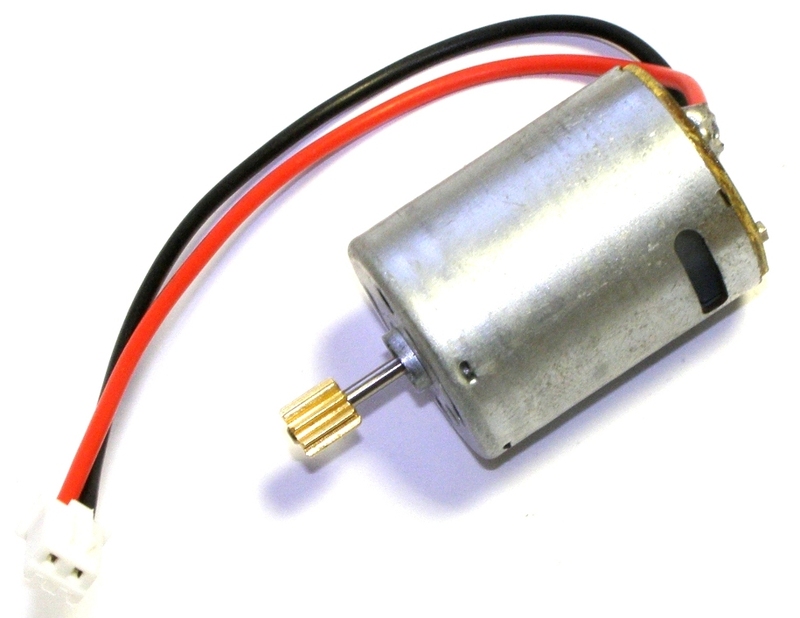 Оба мотора внешне могут выглядеть одинаково, однако их конструкция и работа сильно различаются. Чтобы получить наилучшие результаты, важно выбрать правильный двигатель и обеспечить правильную конфигурацию для вашего приложения. В этой статье мы рассмотрим разницу между щеточными и бесщеточными двигателями, чтобы лучше понять, какой двигатель наиболее подходит для их применения. Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Оба мотора внешне могут выглядеть одинаково, однако их конструкция и работа сильно различаются. Чтобы получить наилучшие результаты, важно выбрать правильный двигатель и обеспечить правильную конфигурацию для вашего приложения. В этой статье мы рассмотрим разницу между щеточными и бесщеточными двигателями, чтобы лучше понять, какой двигатель наиболее подходит для их применения. Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Просмотрите все наши электрические линейные приводы, от микро до промышленных!
Коллекторный двигатель постоянного тока
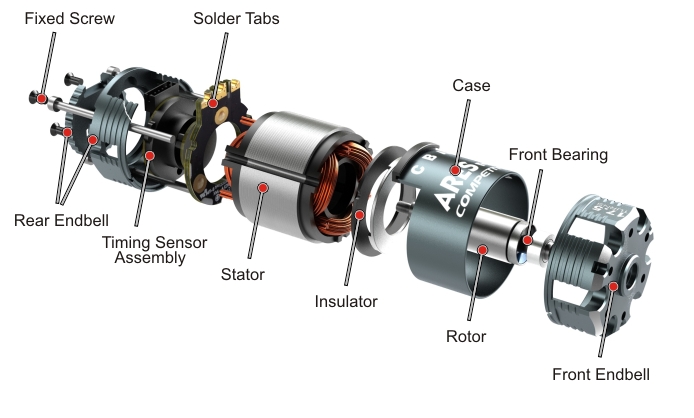
Коллекторный двигатель постоянного тока состоит из нескольких основных компонентов, которые в сочетании с источником питания постоянного тока создают вращающийся двигатель. Конфигурацию якоря, коммутатора, щеток и магнита возбуждения можно увидеть на рисунке 1 ниже.
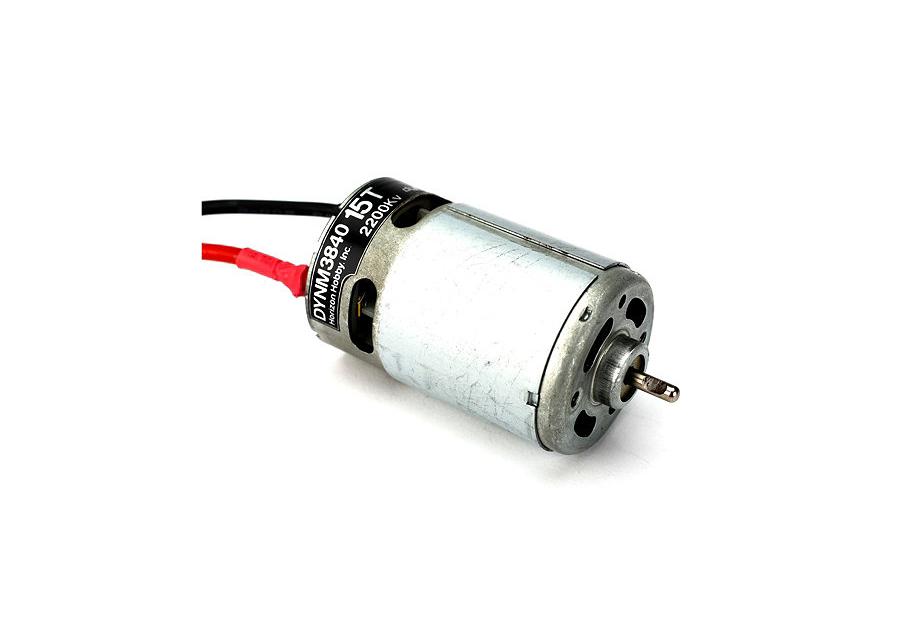
Рис. 1. Чертеж (слева) и фактический пример (справа) коллекторных двигателей постоянного тока
На нашем чертеже показан упрощенный якорь, чтобы было легче увидеть протекающий через него ток; однако щеточные двигатели постоянного тока будут иметь несколько обмоток катушки с якорем. Щетки заряжают коммутатор, который пропускает ток через якорь в противоположной полярности постоянного магнита. Это заставляет якорь вращаться от притяжения магнитов.
Щетки заряжают коммутатор, который пропускает ток через якорь в противоположной полярности постоянного магнита. Это заставляет якорь вращаться от притяжения магнитов.
Коллекторные двигатели постоянного тока просты в эксплуатации, поскольку являются одними из самых простых типов двигателей, однако их срок службы короче, чем у бесщеточных двигателей. Из-за того, что щетки имеют физический контакт с коллектором, искрение является распространенной проблемой для щеточных двигателей. Этот физический контакт также со временем изнашивает щетки и приводит к некоторой потере энергии из-за возникающего трения.
Выберите правильную систему управления для вашего привода из нашего большого ассортимента!
Контроллер бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока (BLDC) устраняет основные недостатки его щеточного аналога. Двигатель состоит из постоянных магнитов и катушек, которые через серию идеально синхронизированных интервалов подачи питания заставляют постоянный магнит в центре вращаться вокруг катушек, окружающих его. Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
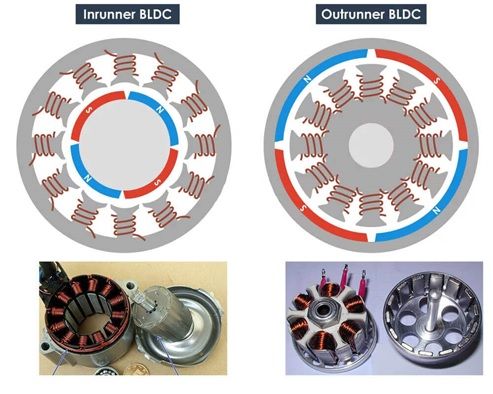
Рисунок 2: Чертеж (слева) и фактический пример (справа) бесколлекторных двигателей постоянного тока
На катушки бесщеточного двигателя подается питание в определенной последовательности (рис. 3), что приводит к вращению постоянных магнитов на роторе. Это делается без какого-либо физического контакта и позволяет использовать более эффективный и долговечный двигатель постоянного тока.
Рис. 3. Последовательность подачи питания на катушки
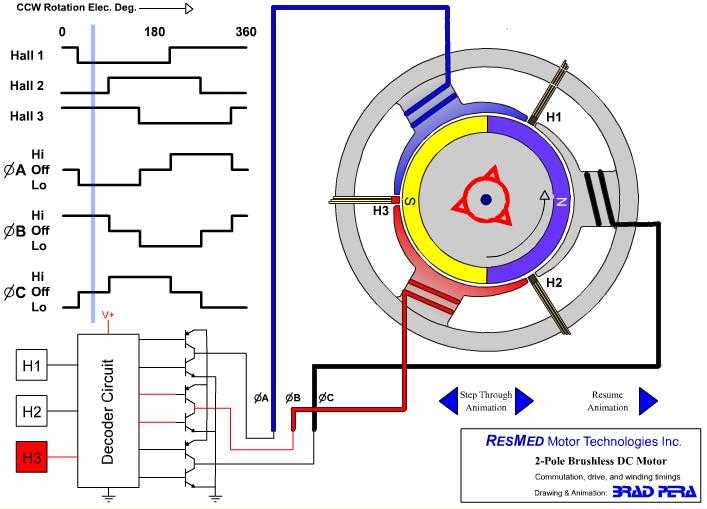
Для того чтобы обеспечить выходной сигнал, показанный на Рис. 3, бесщеточному двигателю постоянного тока требуется электронный блок управления (ЭБУ), определяющий положение ротора и катушки, на которые подается питание.
В отличие от коллекторных двигателей постоянного тока, для вращения которых требуется напряжение 12 В постоянного тока, приложенное непосредственно к двигателю, для бесщеточных двигателей постоянного тока требуется трехфазное питание. Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Подключение бесщеточных двигателей к кулисным переключателям
Progressive Automations в настоящее время предлагает мини-линейный привод PA-14 в варианте бесщеточного постоянного тока для индивидуальных заказов. Схема подключения бесщеточных приводов PA-14 показана на рисунке 4 ниже.
Рис. 4. Схема подключения бесщеточного привода PA-14
Шаг 1
Подсоедините 3 провода контроллера двигателя от бесщеточного привода PA-14 к контроллеру бесщеточного двигателя постоянного тока LC-241. Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Шаг 2
Подключите контакт SPD к заземлению источника питания 12 В постоянного тока, чтобы включить встроенный потенциометр для управления скоростью. Убедитесь, что этот потенциометр повернут по часовой стрелке на полную скорость.
Шаг 3
Подключите контакт GND к контактам Common на кулисном переключателе.
Шаг 4
Подсоедините контакт RUN к обеим сторонам тумблера. Это важно, так как и вперед, и назад для работы требуется, чтобы контакт RUN контактировал с землей.
Шаг 5
Подсоедините контакт REV к одной стороне тумблера. Эта сторона будет обратной стороной тумблера.
Шаг 6
Подайте 12 В постоянного тока на контроллер бесщеточного двигателя постоянного тока, при первом включении питания слышен шум индикатора.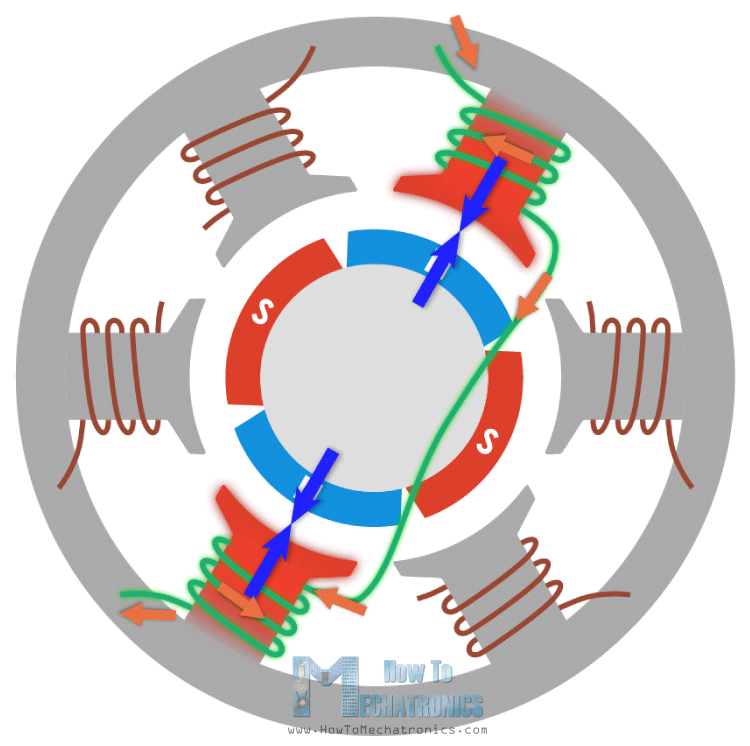
Рис. 5. Физическая проводка бесщеточного привода PA-14
Базовая настройка завершена; с помощью кулисного переключателя привод можно выдвигать и втягивать. Проблема с приводом бесщеточного двигателя постоянного тока заключается в том, что внутренние концевые выключатели не могут остановить подачу питания к приводу, как это происходит с щеточными двигателями постоянного тока. Это связано с тем, что на бесколлекторный двигатель PA-14 подается трехфазное питание. Бесколлекторный электропривод PA-14 оснащен встроенным концевым выключателем с обратной связью, который можно использовать с ПЛК или микроконтроллером для индикации того, что привод находится в конце хода. Обратная связь действует как нормально замкнутый на нормально открытый переключатель, который необходим для интеграции бесщеточного привода PA-14 в реальные приложения.
У нас также есть статья о непрерывном удлинении и втягивании хода привода с бесщеточным двигателем постоянного тока для справки с примерами кодирования.
Подключение щеточных двигателей к кулисным переключателям
Большинство наших электрических линейных приводов поставляются с щеточными двигателями постоянного тока. Простота эксплуатации коллекторных двигателей постоянного тока позволяет подключать кулисные переключатели между источником питания постоянного тока и коллекторным двигателем без необходимости в дополнительном контроллере.
Рисунок 6: Схема подключения кулисного переключателя к приводу с щеточным двигателем подключен к земле блока питания. Этот тип проводки выключателя привода позволяет оператору изменять направление потока электрического тока, поступающего в привод, для изменения направления движения. В качестве физического примера схемы подключения исполнительного механизма с кулисным переключателем это видео является отличным примером. Рис. 7. Физическая проводка кулисного переключателя к приводу с коллекторным двигателем Хотите внедрить автоматизацию в свой дом? Взгляните на наши продукты для домашней автоматизации! Коллекторные двигатели постоянного тока имеют катушки в центре, вращающиеся вокруг постоянных магнитов, в то время как бесщеточные двигатели постоянного тока имеют в центре постоянный магнит, который вращается вокруг катушек. Конструкция бесщеточного двигателя лучше подходит для приложений, которые будут использовать его более длительный срок службы и большую энергоэффективность. Для более простой и легкой работы в приложениях с коротким временем цикла можно воспользоваться удобной конструкцией коллекторных двигателей постоянного тока. Если у вас есть какие-либо вопросы или вы хотите обсудить наши продукты, пожалуйста, не стесняйтесь обращаться к нам! Мы являемся экспертами в том, что мы делаем, и хотим, чтобы вы нашли лучшее решение для вашего приложения. [email protected] | 1-800-676-6123 Компания Parvalux производит электродвигатели уже более 70 лет, и в этом коротком блоге рассказывается о существенных различиях между щеточными и бесщеточными электродвигателями постоянного тока. Коллекторный двигатель постоянного тока имеет постоянные магниты внутри внешнего корпуса с вращающимся якорем внутри. Постоянные магниты неподвижны и называются «статор». Вращающийся якорь содержит электромагнит и называется ротором. В щеточном двигателе постоянного тока ротор вращается на 180 градусов, когда на якорь подается электрический ток. Чтобы пройти дальше начальных 180 градусов, полюса электромагнита должны поменяться местами. Угольные щетки контактируют со статором, когда ротор вращается, меняя магнитное поле и позволяя ротору вращаться на 360 градусов. Подобно щеточному двигателю, бесщеточный двигатель работает за счет чередования полярности обмоток внутри двигателя. По сути, это щеточный двигатель наизнанку, что устраняет необходимость в щетках. В бесщеточном двигателе постоянного тока постоянные магниты установлены на роторе, а электромагниты на статоре. Электронный регулятор скорости (ESC) регулирует или «коммутирует» заряд электромагнитов в статоре, чтобы ротор мог вращаться на 360 градусов. Для получения дополнительной информации о том, какой двигатель постоянного тока, щеточный или бесщеточный, лучше всего подходит для вашего применения, свяжитесь с нашей командой.
Резюме

В чем разница между щеточными и бесщеточными двигателями постоянного тока?
Что такое коллекторный электродвигатель постоянного тока?

Преимущества
Недостатки

Что такое бесщеточный двигатель постоянного тока?
Преимущества

Недостатки