Содержание
Как проверить шаговый двигатель на предмет неисправностей
Содержание
- 1 Пробный запуск
- 2 Проверка сопротивления
- 3 Прозвонка обмоток
- 4 Проблема скачущих оборотов
- 4.1 Общие рекомендации
- 5 Прозвонка исходя из выводов
- 6 Итог
Работа шаговых электрических двигателей подразумевает выполнение разноплановых задач управления, в любых условиях и при разных нагрузках. Это может повлечь за собой разноплановые неисправности. Как, и при помощи каких инструментов проверять моторы мы сегодня и расскажем.
Шаговый мотор 8 выводов
Шаговые электродвигатели представляют собой особый вариант синхронных силовых агрегатов, роторные элементы которых вращаются шагово, дискретно. Конструкция агрегатов аналогичная другим типам моторов, но вращение и способы подключения, делают шаговые модификации отдельной разновидностью. Исходя из этого, неполадки, которые могут возникать при работе таких двигателей также, местами отличаются от других, привычных поломок других моторов. Исправить их и предотвратить довольно просто, главное – грамотно проверить рабочие компоненты.
Исправить их и предотвратить довольно просто, главное – грамотно проверить рабочие компоненты.
Пробный запуск
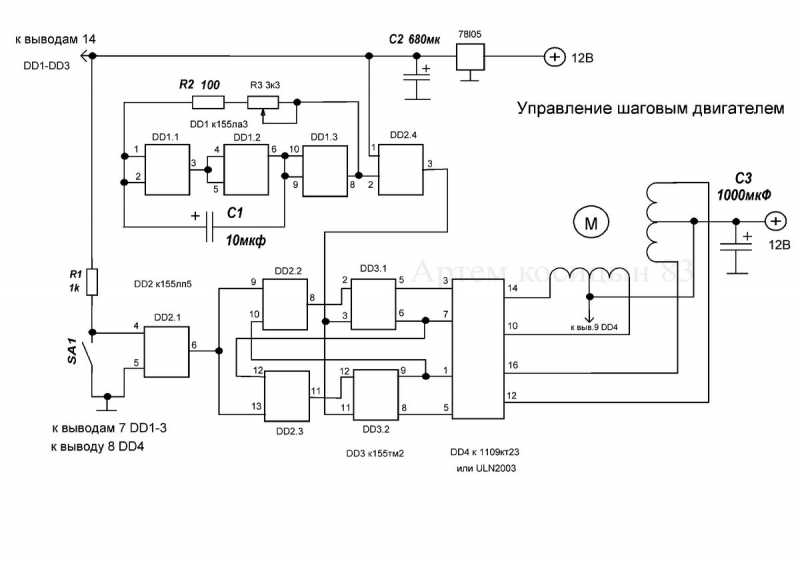
Когда осуществляется работа шагового двигателя в различных компонентах электронного оборудования, применяется специальная схема. Ее основное назначение – управлять оборотами силового агрегата. При обслуживании таких приборов необходимо осуществлять тщательную проверку шаговых моторов.
Осуществляя простую подачу питания на агрегат, не добиться запуска мотора. Чтобы старт был успешным, нужно подавать на моторные намотки сразу два последовательных импульса, которые при этом будут сдвинуты по фазе. Собрать такое устройство генерирования несложно – достаточно использовать 2-3 микросхемы. Для этих компонентов стоит предварительно обеспечить электрическое питание, управленческие переключатели. В целом, реализация такого мини-проекта будет довольно трудоемкой. Поэтому, для того, чтобы проверить качество функционирования шагового двигателя в режиме пошаговой работы, можно использовать относительно простое в конструкции устройство.
Для обеспечения вращения ротора такого мотора, достаточно проводить ручные переключения обмотки. Осуществляется это не так вручную, сколько при помощи устройства электромеханического типа действия. Здесь можно использовать электрический переключатель «галетной» конструкции, который используется в частности, в бытовых приборах: телевизорах, радиоприемниках и др. переключатель должен обладать четырьмя секциями, каждая для отдельного положения (которых также 4). Все они соединены между собой на одной оси.
Как показывает практика, для таких целей используют переключатель от механических устройств KVM, отвечающих за переключение клавиатур, мышки, монитора и других компьютерных компонентов между двумя и более системными блоками. Компонент стоит разобрать, убрав из его конструкции фиксирующие детали, которые в процессе проверки могут препятствовать легкости вращения. Удаляются также и лишние секции.
Пример KVM-переключателя
Проверка сопротивления
Как проверить на исправность шаговый двигатель и уровни его сопротивления? Для этого также применяется специальный инструментарий. Сопротивление в таких моторах измеряется на двух фазах. Чтобы максимально точно измерить показатели, необходимо отсоединить двигатель от разъемов, через которые к каждому мотору подсоединено 4 провода (для моделей с 4 выводами). Начиная с любой стороны, первые два провода являются одной фазой, а оставшиеся два провода — второй фазой. На разъеме вы можете увидеть выступы, где находятся контакты. Их можно использовать для измерения сопротивления. Таким образом, можно измерить каждый двигатель, независимо от разъема.
Сопротивление в таких моторах измеряется на двух фазах. Чтобы максимально точно измерить показатели, необходимо отсоединить двигатель от разъемов, через которые к каждому мотору подсоединено 4 провода (для моделей с 4 выводами). Начиная с любой стороны, первые два провода являются одной фазой, а оставшиеся два провода — второй фазой. На разъеме вы можете увидеть выступы, где находятся контакты. Их можно использовать для измерения сопротивления. Таким образом, можно измерить каждый двигатель, независимо от разъема.
Далее следует установить мультиметр на шкалу Ом и предварительно обнулить устройство. Это следует сделать, соединив два кабеля и нажав кнопку обнуления показания измерительного прибора. Если вы не знаете, как обнулить свой измеритель, необходимо обратить внимание на сопротивление, измеренное при соприкосновении двух проводов, и вычтите его из фактического измерения. Это дает вам истинное измерение сопротивления.
Прозвонка обмоток
Одна из наиболее распространенных проблем, возникающих во всех двигателях, независимо от их типа – отсутствие вращения. Для того, чтобы узнать точную причину поломки, необходимо использовать все тот же мультиметр, правда, в этой ситуации его нужно применять в режиме вольтметра. Измерительный прибор осуществит проверку наличия подачи питающего напряжения. Если с подачей питания все в порядке, тогда проблема – это неисправность самого силового агрегата. Исходя из этого, стоит провести поверку целостности подключения шагового двигателя и тщательно прозвонить его обмотки. Для этого также применяется мультиметр, работающий в своем обыкновенном режиме.
Для того, чтобы узнать точную причину поломки, необходимо использовать все тот же мультиметр, правда, в этой ситуации его нужно применять в режиме вольтметра. Измерительный прибор осуществит проверку наличия подачи питающего напряжения. Если с подачей питания все в порядке, тогда проблема – это неисправность самого силового агрегата. Исходя из этого, стоит провести поверку целостности подключения шагового двигателя и тщательно прозвонить его обмотки. Для этого также применяется мультиметр, работающий в своем обыкновенном режиме.
Прозвонка мультиметром двигателя
Давайте же более детально рассмотрим все нюансы и шаги прозвонки обмоток такого силового агрегата.
- первое, что стоит сделать – просмотреть все спецификации. В сопроводительной документации для каждой отдельной модели точно указывается разновидность вывода, с помощью которого обеспечивается высокий уровень общего напряжения для всех типов намоток. Также здесь вы можете посмотреть, какие именно выходы подсоединяются к определенным катушкам агрегата;
- далее стоит убедиться, что кабельные жгуты в силовом агрегате являются доступными.
 В ситуациях, когда они уже подсоединены к драйверной цепи, необходимо отключить их. Также стоит проверить открытость всех контактов в разъеме, независимо от положения двигателя: изъят из цепи, или находится за пределами коробки. Это делается с целью дальнейшей проверки намотки мотора;
В ситуациях, когда они уже подсоединены к драйверной цепи, необходимо отключить их. Также стоит проверить открытость всех контактов в разъеме, независимо от положения двигателя: изъят из цепи, или находится за пределами коробки. Это делается с целью дальнейшей проверки намотки мотора; - точная настройка мультиметра (желательно использовать цифровую модификацию). Делать это стоит точно соблюдая инструкцию, а после этого присоединить к системе зондовые измерительные компоненты (в большинстве случаев это – провода). Включите мультиметр и выберите максимально возможный диапазон сопротивления.
- следует проверить каждый комплект обмоток двигателя. Для этого подсоедините один из щупов щупа в общий контактный разъем напряжения, а другой — в один из контактных разъемов обмотки. На исправности медных обмоток двигателя будет указывать неограниченное значение уровня сопротивления, которое отобразится на дисплее измерительного устройства. С помощью этой процедуры проверьте все остальные обмотки. Удалите провода зонда и выключите мультиметр, когда вы закончите тестировать каждую обмотку;
- управление шаговым мотором следует осуществлять при помощи схемы драйвера. Для этого, подключите жгут проводов шагового двигателя к принимающему разъему на схеме драйвера шагового двигателя. В соответствии с инструкциями, прилагаемыми к драйверу двигателя, варьируйте ширину импульса в широком диапазоне, чтобы убедиться, что шаговый двигатель работает. Если вам нужно, чтобы двигатель был включен, чтобы продолжить его использование, оставьте его подключенным. В противном случае отсоедините его от жгута проводов, чтобы снять.
 В ситуациях, когда они уже подсоединены к драйверной цепи, необходимо отключить их. Также стоит проверить открытость всех контактов в разъеме, независимо от положения двигателя: изъят из цепи, или находится за пределами коробки. Это делается с целью дальнейшей проверки намотки мотора;
В ситуациях, когда они уже подсоединены к драйверной цепи, необходимо отключить их. Также стоит проверить открытость всех контактов в разъеме, независимо от положения двигателя: изъят из цепи, или находится за пределами коробки. Это делается с целью дальнейшей проверки намотки мотора; Удалите провода зонда и выключите мультиметр, когда вы закончите тестировать каждую обмотку;
Удалите провода зонда и выключите мультиметр, когда вы закончите тестировать каждую обмотку;Драйвер шагового мотора
Проблема скачущих оборотов
Итак, данная проблема возникает в шаговом моторе, который устанавливается в регуляторе холостого хода. Чаще всего вы могли замечать такую систему управления в автомобилях. Причин возникновения такой существенной поломки множество, из-за чего, стоит проводить проверку функциональности электрического двигателя, установленного в механизме.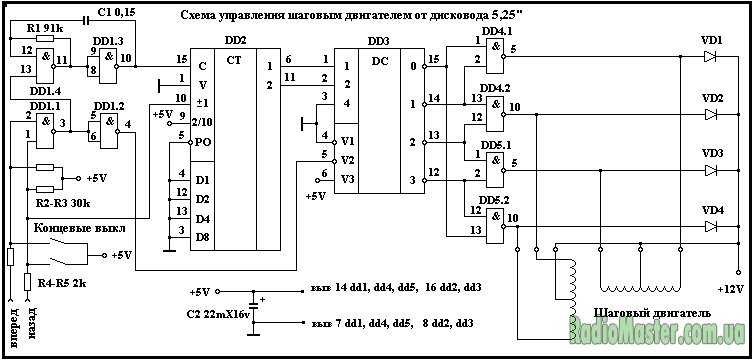
Вот наиболее распространенные из причин поломок:
- нарушения в индикаторе холостого хода. Частично компонент можно контролировать мультиметром;
- датчик, определяющий состояние заслонки дросселя. Также довольно просто мониторится при помощи обычного тестера;
- температурный датчик жидкости в системе охлаждения. Поверхностные данные можно получить и с помощью все того же тестера, но точность их вызывает сомнения;
- подсасывание воздуха в системе подачи топлива;
- некорректная работа форсунок;
- загрязнения дроссельного узла;
- поломка в датчике положения коленчатого вала.
Датчик холостого хода
Существуют и другие причины поломок шагового электродвигателя регулятора холостого хода, но, вышеперечисленные – самые распространенные.
Проверка регулятора при помощи тестера – самый простой и доступный вариант, но его результаты укажут только на цельность намоток. Между четырьмя обмотками: A — B, C — D уровень сопротивления должен быть в пределах от 40 до 80 Ом. Между элементами B — C, A – D величина неограничена. Эти показатели – единственные, которые можно легко и быстро проверить.
Между четырьмя обмотками: A — B, C — D уровень сопротивления должен быть в пределах от 40 до 80 Ом. Между элементами B — C, A – D величина неограничена. Эти показатели – единственные, которые можно легко и быстро проверить.
РХХ более детально мониторится на стенде. Как показывает практика, поломки обмоток, в частности, их разрывы, случаются крайне редко. Ключевой причиной поломки регулятора оборотов – загрязненность штока или вовсе его износ. Стабильное функционирование детали обеспечивает равномерность входа и выхода стержня, без каких-либо заклиниваний и подергиваний. Два последних фактора – еще дни существенные поломки, на предмет которых также стоит проверять мотор.
Выход должен характеризоваться плавностью при небольших нажатиях на стержень, перекрывающего канал. Привычного броска напряжения на этот элемент не хватит для достижения требуемого результата, ведь компонент работает только от импульсов.
Можно также отдельно приобрести уже готовые решения для проверки шаговых двигателей регуляторов холостого хода, которые продаются для конкретных марок. В частности, на рынке довольно много моделей для машин марки ВАЗ.
В частности, на рынке довольно много моделей для машин марки ВАЗ.
Общие рекомендации
Поломка мотора шагового типа неизбежно приведет выходу из строя ключевых компонентов системы и сбоев в работе. Вот лишь некоторые из них:
- невозможность запуска двигателя на холостых оборотах;
- увеличение количества оборотов при старте на холостом ходе;
- постоянное увеличение интенсивности вращений по мере роста уровня прогрева мотора.
Такие поломки могут нередко возникать и через выход из строя цепей управления шаговым электродвигателем. Стопроцентно причины и следствие можно определить при помощи тестера ДСТ-2М, позволяющим задавать конкретное положение шагового агрегата, в качестве отдельного параметра управленческого блока.
Пример контроллера шагового двигателя
Подобрав подходящий режим регулировки для исполнительных механизмов в тестере, необходимо попробовать переместить мотор в ту или иную сторону, посредством блока управления. Стоит обратить внимание на наличие таких явлений, указывающих на неисправность самого мотора или же его цепей:
Стоит обратить внимание на наличие таких явлений, указывающих на неисправность самого мотора или же его цепей:
- неизменность оборотов электрического двигателя;
- постоянство показателей расхода воздуха;
- определение системой постоянного положения агрегата.
В таких ситуациях применение мультиметра не будет результативным, ведь механизм регулировки будет правильно отрабатывать все попытки закрытия или открытия байпасного канала.
В данной ситуации при эксплуатации автомобиля будет наблюдаться зависание оборотов при отсоединении коробки переключения передач, и даже заглохание двигателя при движении накатом. Запуск двигателя невозможен без использования дроссельной заслонки, если имеют место такие неполадки.
Наличие данных неисправностей напрямую указывает на поломку шарового двигателя и его цепей. Даже в ситуациях, когда цепи исправны, силовой агрегат может неправильно выполнять команды, поступающие к ним от управленческой системы.
Прозвонка исходя из выводов
Здесь мы рассмотрим ключевые особенности прозванивания двигателей, которые обладают разным количеством выводов.
Мультиметр
Типы контроля устройств, в зависимости от числа кабелей:
- мотор, обладающий 5 проводами, среди которых 1 всегда «плюсовой». Все выводы проходят прозвонку друг с другом, но, при этом, сопротивление «+» будет всегда на постоянном уровне. Если работать с проводами управления, то их сопротивление будет на порядок выше, чем у аналогичных проводников с «плюсовыми» клеммами;
- на 6 выводов моторы также просто проверяются. Их отличие от пяти-выводных в том, что проводниковые элементы собираются в 2 обмотки, по 3 компонента в каждой. Средний между ними проводник и является плюсом. А для того, чтобы определить, какой именно из шести является средним и используется мультиметр, нужно проверит сопротивления у каждого проводника отдельно;
- 8 выводов. Отличительная черта таких агрегатов – все обмотки независимого типа, то есть, не соединяются друг с другом. По теории, последовательность должна быть аналогичной с 5-ти выводными модификациями. Для начала нужно обнаружить все намотки и определить направление вращения. С целью обеспечить себе удобство, можно на валу оставлять метки и на корпусе тоже. По ним легче ориентироваться в какую сторону происходят обороты.
 Отличительная черта таких агрегатов – все обмотки независимого типа, то есть, не соединяются друг с другом. По теории, последовательность должна быть аналогичной с 5-ти выводными модификациями. Для начала нужно обнаружить все намотки и определить направление вращения. С целью обеспечить себе удобство, можно на валу оставлять метки и на корпусе тоже. По ним легче ориентироваться в какую сторону происходят обороты.
Отличительная черта таких агрегатов – все обмотки независимого типа, то есть, не соединяются друг с другом. По теории, последовательность должна быть аналогичной с 5-ти выводными модификациями. Для начала нужно обнаружить все намотки и определить направление вращения. С целью обеспечить себе удобство, можно на валу оставлять метки и на корпусе тоже. По ним легче ориентироваться в какую сторону происходят обороты. Итог
Как можно видеть, в электронике реализовано сразу несколько эффективных методов проверки шаговых двигателей, каждый из которых удобно применять в различных ситуациях. Инструментарий регулярно расширяется, упрощая процесс идентификации.
Как проверить шаговый двигатель с помощью мультиметра (руководство) — AvtoTachki
Содержание
- Что нужно для проверки шагового вращателя с помощью мультиметра
- Настройка мультиметра
- Тестирование проводов, являющихся частью одной катушки
- Тестирование контактов в случае штырькового провода
- Подводя итог
Шаговый двигатель — это двигатель постоянного тока, который может «управляться» микроконтроллером, а его основными частями являются вращатель и статор. Они используются в дисководах, гибких дисках, компьютерных принтерах, игровых автоматах, сканерах изображений, станках с ЧПУ, компакт-дисках, 3D-принтерах и многих других подобных устройствах.
Они используются в дисководах, гибких дисках, компьютерных принтерах, игровых автоматах, сканерах изображений, станках с ЧПУ, компакт-дисках, 3D-принтерах и многих других подобных устройствах.
Иногда шаговые двигатели повреждаются, что приводит к разрыву непрерывного электрического пути. Ваш 3D-принтер или любая другая машина, использующая эти двигатели, не будет работать без непрерывности. Поэтому важно проверить, имеет ли ваш шаговый двигатель непрерывность.
Как правило, вам понадобится мультиметр для проверки целостности вашего шагового двигателя. Начните с настройки мультиметра. Поверните селекторную ручку в положение настройки сопротивления и подключите щупы мультиметра к соответствующим портам, т. е. черный щуп к разделу COM, а красный щуп к порту с буквой «V» рядом с ним. Отрегулируйте мультиметр, соединив щупы вместе. Проверьте провода или контакты шагового вращателя. Обратите внимание на показания на дисплее.
Обычно, если проводник имеет непрерывный электрический путь, показания будут находиться в диапазоне от 0. 0 до 1.0 Ом. Вам нужно будет приобрести новый шаговый вращатель, если вы получите показания более 1.0 Ом. Это означает, что сопротивление электрическому току слишком велико.
0 до 1.0 Ом. Вам нужно будет приобрести новый шаговый вращатель, если вы получите показания более 1.0 Ом. Это означает, что сопротивление электрическому току слишком велико.
Что нужно для проверки шагового вращателя с помощью мультиметра
Вам понадобятся следующие инструменты:
- Шаговый вращатель
- 3D-принтер
- Шаговый кабель, идущий к материнской плате принтера — коаксиальный кабель должен иметь 4 контакта.
- Четыре провода в случае шаговых вращателей с проводами
- Цифровой мультиметр
- Мультиметрические щупы
- Самоклеющаяся пленка
Настройка мультиметра
Начните с выбора Ом на мультиметре с помощью ручки выбора. Убедитесь, что у вас 20 Ом как самое низкое. Это связано с тем, что сопротивление большинства катушек шагового двигателя составляет менее 20 Ом. (1)
Подключите щупы к портам мультиметра.. Если щупы не подключены к соответствующим портам, подключите их следующим образом: вставьте красный щуп в порт со знаком «V» рядом с ним, а черный щуп в порт с надписью «COM».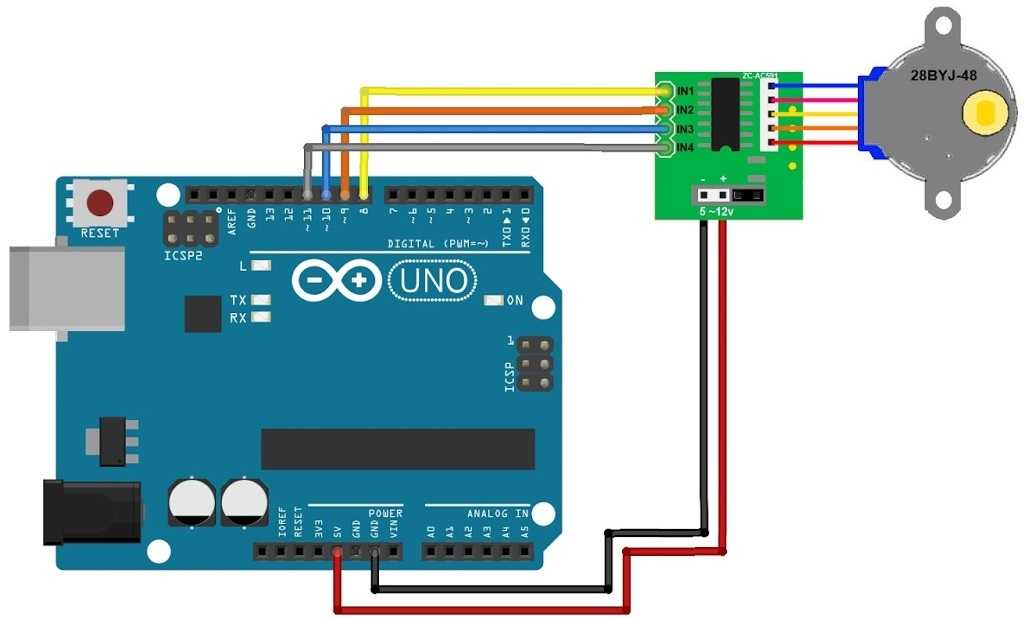 После подключения щупов приступайте к их регулировке.
После подключения щупов приступайте к их регулировке.
Регулировка мультиметра скажет вам, если мультиметр работает или нет. Короткий звуковой сигнал означает, что мультиметр находится в хорошем состоянии. Просто соедините зонды вместе и послушайте звуковой сигнал. Если он не издает звуковой сигнал, замените его или отнесите специалисту для ремонта.
Тестирование проводов, являющихся частью одной катушки
После того, как вы настроили мультиметр, приступайте к тестированию шагового вращателя. Чтобы проверить провода, являющиеся частью одной катушки, подсоедините красный провод от шагового вращателя к красному щупу.
Затем возьмите желтый провод и подключите его к черному щупу.
В этом случае мультиметр не подаст звуковой сигнал. Это связано с тем, что комбинация желто-красного провода не относится к одной и той же катушке.
Итак, удерживая красный провод на красном щупе, отпустите желтый провод и присоедините черный провод к черному щупу. Ваш мультиметр будет издавать непрерывный звуковой сигнал, пока вы не сломаете или не разомкнете переключатель, отсоединив щупы мультиметра. Звуковой сигнал означает, что черный и красный провода относятся к одной и той же катушке.
Ваш мультиметр будет издавать непрерывный звуковой сигнал, пока вы не сломаете или не разомкнете переключатель, отсоединив щупы мультиметра. Звуковой сигнал означает, что черный и красный провода относятся к одной и той же катушке.
Пометьте провода одной катушки, т.е. черный и красный, прикрепив их скотчем. Теперь продолжайте и присоедините красный щуп к зеленому проводу, а затем замкните переключатель, присоединив желтый провод к черному щупу.
Мультиметр издаст звуковой сигнал. Эти два провода также пометьте лентой.
Тестирование контактов в случае штырькового провода
Что ж, если ваш шаговый вращатель использует коаксиальный кабель, вам нужно будет проверить контакты на кабеле. Штырьков обычно 4 — точно так же, как 4 провода в шаговом ротаторе с проводами.
Пожалуйста, следуйте приведенной ниже схеме, чтобы выполнить проверку непрерывности для этого типа шагового вращателя:
- Подключите красный щуп к первому контакту на кабеле, а затем другой щуп к следующему контакту. Полярности нет, поэтому не имеет значения, какой щуп куда идет. Обратите внимание на значение в омах на экране дисплея.
- Постоянно удерживая щуп на первом стержне, двигайте другой щуп поперек остальных стержней, каждый раз отмечая показания. Вы поймете, что мультиметр не издает звуковых сигналов и не регистрирует никаких показаний. Если это так, ваш степпер нуждается в ремонте.
- Возьмите свои зонды и прикрепите их к 3rd и 4th датчики, обратите внимание на показания. Вы должны получить показания сопротивления только на двух последовательных контактах.
- Вы можете продолжить и проверить значения сопротивления других шаговых вращателей. Сравните значения.
Подводя итог
При проверке сопротивлений других шаговых вращателей не перепутайте кабели. Различные степперы имеют разные системы проводки, что может привести к повреждению других несовместимых кабелей. В противном случае вы можете проверить проводку, если 2 степпера имеют одинаковые стили проводки, тогда вы используете взаимозаменяемые кабели. (2)
Взгляните на некоторые из наших статей ниже.
- Как проверить целостность мультиметром
- Как проверить свечу зажигания мультиметром
- Рейтинг мультиметра CAT
Рекомендации
(1) катушка – https://www.britannica.com/technology/coil
(2) системы электропроводки – https://www.slideshare.net/shwetasaini23/electrical-wiring-system
Видео ссылки
Easy Identify leads on a 4 wire stepper motor with Multimeter
Смотрите это видео на YouTube
Ford Escort | Шаговый двигатель карбюратора
Ford Escort
Сервисное обслуживание и эксплуатация
Руководства → Ford → Escort (Форд Эскорт)
3.4.2.9. Шаговый двигатель карбюратора
| ОБЩИЕ СВЕДЕНИЯ |
Предупреждение
Неровные и нестабильные
обороты холостого хода не всегда свидетельствуют о выходе из строя шагового
двигателя. Предварительно необходимо проверить надежность контакта между плунжером
и установочным винтом.
Шаговый двигатель, пластина подвески и плунжер
|
| 1 – шаговый двигатель, 2 – пластина подвески, 3 – плунжер |
Начальная регулировка винта рычага дросселя
|
| 1 – плунжер шагового двигателя,
2 – головка регулировочного винта, 3 – колпачок, 4 – рычаг дросселя |
Проверка правильности регулировки шагового двигателя
|
| 1 – контргайка, 2 – регулировочный винт, 3 – лезвие щупа, 4 – плунжер |
Положения плунжера шагового двигателя
|
|
| ПОРЯДОК ВЫПОЛНЕНИЯ | ||||||||||||||||||
|
Реклама
Как выставить ток на драйвере шагового двигателя?
Прочее › Драйвер › Как запустить шаговый двигатель без драйвера?
Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя.
- Как правильно подобрать драйвер для шагового двигателя?
- Как рассчитать Vref?
- Как работает драйвер шагового мотора?
- Как подключить шаговый двигатель с шестью проводами?
- Как узнать какой драйвер качать?
- Какая мощность у шагового двигателя?
- Что такое Микрошаг?
- Как проверить правильно ли работают драйвера?
- Как ставятся драйвера?
- Как управляются шаговые двигатели?
- Почему пищит шаговый двигатель?
- Как узнать на сколько вольт шаговый двигатель?
- Как отличить шаговый двигатель от обычного?
- Чем драйвер отличается от заглушки?
- Как понять обновлены ли драйвера?
- Как узнать какой драйвер нужен для видеоадаптера?
- Как подключить 2 шаговых двигателя на один драйвер?
- На чем основан принцип работы шагового двигателя?
- Что если слетели драйвера?
- Можно ли разобрать шаговый двигатель?
- Как подключить двигатель по схеме треугольник?
- Что такое драйвер шагового двигателя?
- Как узнать правильно ли установлены драйвера?
- Как определить тип шагового двигателя?
- Как правильно подобрать драйвер для светодиодов?
Как правильно подобрать драйвер для шагового двигателя?
Первое, на что важно обратить внимание при выборе драйвера ШД, — величина тока, которую способна обеспечить силовая часть. Она должна превышать ток фазы выбранного ШД на треть. Далее — напряжение питания. Этот параметр оказывает влияние на крутящий момент на высоких оборотах, вибрации, нагрев привода.
Как рассчитать Vref?
Как рассчитать Vref
Значение Rsense можно выяснить по маркировке, точно так же как с A4988, только на этот раз ищите резисторы на нижней стороне платы. Чтобы рассчитать Irms просто поделите ток шагового двигателя на 1.4 (квадратный корень из двух).
Как работает драйвер шагового мотора?
Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >
Как подключить шаговый двигатель с шестью проводами?
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Как узнать какой драйвер качать?
Как узнать, какой драйвер нужен и скачать его вручную:
- Зайдите в диспетчер устройств Windows.
- В диспетчере устройств кликните правой кнопкой мыши по неизвестному устройству и нажмите «Свойства».
- В окне свойств перейдите на вкладку «Сведения» и выберите пункт «ИД оборудования» в поле «Свойство».
Какая мощность у шагового двигателя?
Кратко о мощности шагового двигателя
Выходная мощность — другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.
Что такое Микрошаг?
Микрошаг — режим деления шага, при работе в котором обмотки шагового двигателя в каждый момент времени запитаны не полным током, а его уровнями, изменяющимися по закону sin в одной фазе и cos во второй. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами.
Как проверить правильно ли работают драйвера?
В строке поиска или в меню выполнить (выполнить вызывается клавишами Win+R) введите команду Verifier и нажмите клавишу Enter. Диспетчер проверки драйверов также можно запустить в командной строке, введите команду Verifier и нажмите клавишу Enter, или в диспетчере задач зайдя в «Файл» => Запустить новую задачу.
Как ставятся драйвера?
Нажмите правой кнопкой мыши Мой компьютер, выберите Управление:
- Откройте Диспетчер устройств.
- Нажмите Поиск драйвера на моем компьютере.
- Нажмите Выбрать из списка драйверов устройств на моем компьютере.
- Выделите Показать все устройства и нажмите Далее.
- Нажмите «Установить с диска».
- Нажмите Обзор.
Как управляются шаговые двигатели?
Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе.
Почему пищит шаговый двигатель?
Свист вызван влиянием магнитного ротора на фазные обмотки. Наведенные ротором в фазных обмотках ЭДС интерферируют с напряжением, задаваемым драйвером, в результате получаются биения электромагнитных волн, которые проявляют себя как высокочастотный шум — свист.
Как узнать на сколько вольт шаговый двигатель?
Для того, чтобы вычислить максимальное напряжение, которое вам следует использовать в зависимости от индуктивности обмоток шагового двигателя используйте следующую формулу: Максимальное напряжение = 1000 * SQRT(Индуктивность) где SQRT — это квадратный корень.
Как отличить шаговый двигатель от обычного?
Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора. Электропривод такого типа построен на базе следящей схемы автоматического регулирования.
Чем драйвер отличается от заглушки?
Инкрементальный подход осуществляется с помощью фиктивных программ, называемых заглушками и драйверами. Заглушки и драйверы не реализуют всю логику программного модуля, а только моделируют обмен данными с вызывающим модулем. Заглушка: вызывается тестируемым модулем. Драйвер: вызывает модуль для тестирования.
Как понять обновлены ли драйвера?
В поле поиска на панели задач введите диспетчер устройств, а затем выберите диспетчер устройств. Выберите категорию, чтобы просмотреть имена устройств, а затем щелкните правой кнопкой мыши (или нажмите и удерживайте) устройство, которое требуется обновить. Выберите пункт Автоматический поиск обновленных драйверов.
Как узнать какой драйвер нужен для видеоадаптера?
В диспетчере, в списке устройств, открыть раздел «Видеоадаптеры», найти в нем видеокарту, щелкнуть по ней правой кнопкой мышки и в появившемся контекстном меню выбрать пункт «Свойства». 3. В открывшемся окне перейти на вкладку «Драйвер», где и будет отображаться версия драйвера видеокарты.
Как подключить 2 шаговых двигателя на один драйвер?
Если нужно чтобы 2 ШД вращались (шагали) синхронно — нужно взять два драйвера, подключить к каждому драйверу свой шаговый двигатель и у драйверов объединть сигналы STEP/DIR/ENABLE. Сигналы STEP/DIR/ENABLE будут подаваться синхронно на оба драйвера и ШД будут шагать одновременно.
На чем основан принцип работы шагового двигателя?
Шаговый тип электродвигателей представляет собой синхронное бесщеточное устройство с парой обмоток, через которые, собственно, и подается ток. Принцип действия электродвигателя подобного типа заключается в том, что ток, передаваемый на одну из обмоток статора, провоцирует фиксацию ротора.
Что если слетели драйвера?
Найдите устройство в диспетчере задач, нажмите правой кнопкой мыши и удалите устройство. Вместе с устройством удалите и драйвер (нужно установить галку во время удаления устройства). Потом просканируйте компьютер на наличие новых устройств нажав на кнопку «Обновить конфигурацию оборудования».
Можно ли разобрать шаговый двигатель?
Шаговики разбирать нельзя — они от этого портятся!!!
Как подключить двигатель по схеме треугольник?
Как видно из схемы подключения электродвигателя — «треугольник», обмотки подключаются последовательно друг к другу: конец первой обмотки соединяется с началом второй и так далее. То есть к каждой обмотке будет приложено напряжение 380 В (при использовании сети 220/380 В).
Что такое драйвер шагового двигателя?
Драйвера моторов и шаговых двигателей — это особые модули, которые обеспечивают управление устройствами, способствуют их эффективной работе и отслеживают работоспособность. Моторы и шаговые двигатели представляет собой непростые конструкции, которым необходим особый контроль в виде драйвера.
Как узнать правильно ли установлены драйвера?
В поле поиска на панели задач введите диспетчер устройств, а затем выберите диспетчер устройств. Выберите категорию, чтобы просмотреть имена устройств, а затем щелкните правой кнопкой мыши (или нажмите и удерживайте) устройство, которое требуется обновить. Выберите пункт Автоматический поиск обновленных драйверов.
Как определить тип шагового двигателя?
Какой тип шагового двигателя у меня? Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель.
Как правильно подобрать драйвер для светодиодов?
Драйвер для светодиодов — это источник тока.Поэтому, при выборе драйвера для подключения светодиодных источников света, необходимо ориентироваться на следующие характеристики:
- входное напряжение;
- выходное напряжение;
- выходной ток;
- степень защиты от влаги и пыли;
- выходная мощность.
Как Настройка тока на драйвера шагового двигателя?
Прочее › Драйвер › Драйвер шагового двигателя что это
Минусовой щуп мультиметра подсоединяем к контакту GND (минус, он общий), плюсовым прикасаемся к корпусу подстроечного резистора на драйвере. Крутим подстроечный резистор отвёрткой и замеряем расчётное напряжение Vref. Таким образом мы выставляем правильный ток для драйвера шагового двигателя.
- Как правильно подобрать драйвер для шагового двигателя?
- Как рассчитать Vref?
- Что такое драйвер шагового двигателя?
- Как работает шаговый двигатель?
- Какая мощность у шагового двигателя?
- Как узнать какой драйвер качать?
- Что такое Микрошаг?
- Как проверить правильно ли работают драйвера?
- Как определить тип шагового двигателя?
- Как понять обновлены ли драйвера?
- Сколько оборотов в минуту делает шаговый двигатель?
- Почему пищит шаговый двигатель?
- Как узнать на сколько вольт шаговый двигатель?
- В каком порядке нужно устанавливать драйвера?
- Чем драйвер отличается от заглушки?
- Как узнать какой драйвер нужен для видеоадаптера?
- Как узнать правильно ли установлены драйвера?
- Как правильно подобрать драйвер для светодиодов?
Как правильно подобрать драйвер для шагового двигателя?
Первое, на что важно обратить внимание при выборе драйвера ШД, — величина тока, которую способна обеспечить силовая часть. Она должна превышать ток фазы выбранного ШД на треть. Далее — напряжение питания. Этот параметр оказывает влияние на крутящий момент на высоких оборотах, вибрации, нагрев привода.
Как рассчитать Vref?
Как рассчитать Vref
Значение Rsense можно выяснить по маркировке, точно так же как с A4988, только на этот раз ищите резисторы на нижней стороне платы. Чтобы рассчитать Irms просто поделите ток шагового двигателя на 1.4 (квадратный корень из двух).
Что такое драйвер шагового двигателя?
Драйвера моторов и шаговых двигателей — это особые модули, которые обеспечивают управление устройствами, способствуют их эффективной работе и отслеживают работоспособность. Моторы и шаговые двигатели представляет собой непростые конструкции, которым необходим особый контроль в виде драйвера.
Как работает шаговый двигатель?
Шаговый тип электродвигателей представляет собой синхронное бесщеточное устройство с парой обмоток, через которые, собственно, и подается ток. Принцип действия электродвигателя подобного типа заключается в том, что ток, передаваемый на одну из обмоток статора, провоцирует фиксацию ротора.
Какая мощность у шагового двигателя?
Кратко о мощности шагового двигателя
Выходная мощность — другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.
Как узнать какой драйвер качать?
Как узнать, какой драйвер нужен и скачать его вручную:
- Зайдите в диспетчер устройств Windows.
- В диспетчере устройств кликните правой кнопкой мыши по неизвестному устройству и нажмите «Свойства».
- В окне свойств перейдите на вкладку «Сведения» и выберите пункт «ИД оборудования» в поле «Свойство».
Что такое Микрошаг?
Микрошаг — режим деления шага, при работе в котором обмотки шагового двигателя в каждый момент времени запитаны не полным током, а его уровнями, изменяющимися по закону sin в одной фазе и cos во второй. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами.
Как проверить правильно ли работают драйвера?
В строке поиска или в меню выполнить (выполнить вызывается клавишами Win+R) введите команду Verifier и нажмите клавишу Enter. Диспетчер проверки драйверов также можно запустить в командной строке, введите команду Verifier и нажмите клавишу Enter, или в диспетчере задач зайдя в «Файл» => Запустить новую задачу.
Как определить тип шагового двигателя?
Какой тип шагового двигателя у меня? Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель.
Как понять обновлены ли драйвера?
В поле поиска на панели задач введите диспетчер устройств, а затем выберите диспетчер устройств. Выберите категорию, чтобы просмотреть имена устройств, а затем щелкните правой кнопкой мыши (или нажмите и удерживайте) устройство, которое требуется обновить. Выберите пункт Автоматический поиск обновленных драйверов.
Сколько оборотов в минуту делает шаговый двигатель?
В среднем, биполярный мотор можно раскрутить до 1000-1500 оборотов в минуту, а трехфазный шаговик до 2000-3000 оборотов.
Почему пищит шаговый двигатель?
Свист вызван влиянием магнитного ротора на фазные обмотки. Наведенные ротором в фазных обмотках ЭДС интерферируют с напряжением, задаваемым драйвером, в результате получаются биения электромагнитных волн, которые проявляют себя как высокочастотный шум — свист.
Как узнать на сколько вольт шаговый двигатель?
Для того, чтобы вычислить максимальное напряжение, которое вам следует использовать в зависимости от индуктивности обмоток шагового двигателя используйте следующую формулу: Максимальное напряжение = 1000 * SQRT(Индуктивность) где SQRT — это квадратный корень.
В каком порядке нужно устанавливать драйвера?
Рекомендуемый процесс установки:
Шаг1: Установите операционную систему. Шаг2: Установите драйвер чипсета. Шаг3: Последовательно установите драйверы графического, звукового и сетевого адаптеров. Шаг4: Установите обновления и исправления операционной системы, если таковые имеются.
Чем драйвер отличается от заглушки?
Инкрементальный подход осуществляется с помощью фиктивных программ, называемых заглушками и драйверами. Заглушки и драйверы не реализуют всю логику программного модуля, а только моделируют обмен данными с вызывающим модулем. Заглушка: вызывается тестируемым модулем. Драйвер: вызывает модуль для тестирования.
Как узнать какой драйвер нужен для видеоадаптера?
В диспетчере, в списке устройств, открыть раздел «Видеоадаптеры», найти в нем видеокарту, щелкнуть по ней правой кнопкой мышки и в появившемся контекстном меню выбрать пункт «Свойства». 3. В открывшемся окне перейти на вкладку «Драйвер», где и будет отображаться версия драйвера видеокарты.
Как узнать правильно ли установлены драйвера?
В поле поиска на панели задач введите диспетчер устройств, а затем выберите диспетчер устройств. Выберите категорию, чтобы просмотреть имена устройств, а затем щелкните правой кнопкой мыши (или нажмите и удерживайте) устройство, которое требуется обновить. Выберите пункт Автоматический поиск обновленных драйверов.
Как правильно подобрать драйвер для светодиодов?
Драйвер для светодиодов — это источник тока.Поэтому, при выборе драйвера для подключения светодиодных источников света, необходимо ориентироваться на следующие характеристики:
- входное напряжение;
- выходное напряжение;
- выходной ток;
- степень защиты от влаги и пыли;
- выходная мощность.
Что такое шаговый двигатель и как им управлять
Шаговый двигатель – это устройство, преобразующее электрическую энергию в механическую. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять.
Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования.
Популярно использование шагового двигателя и в точной робототехнике.
Устройство шагового двигателя
Как любой мотор, шаговый двигатель состоит из статора и ротора. Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения.
В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя. Поэтому разбирать двигатель категорически не рекомендуется.
Принцип работы шагового двигателя
Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода
В отличие от сервопривода шаговый двигатель перемещается по шагам. Благодаря этому с его помощью можно совершать очень точные движения. Угол поворота выходного вала сервопривода обычно ограничен диапазоном от 0°C до 180°C. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом.
Основные технические характеристики шагового двигателя
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление.
Удерживающий момент – это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент (тормозящий момент) нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции. При отсутствии стопорного момента без поданного питания происходило бы проворачивание.
Номинальное напряжение – зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение.
Номинальный ток – подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага – способность двигателя совершать перемещение при одном шаге, указывается в градусах.
Момент инерции ротора – влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора.
Длина двигателя – длина корпуса без вала.
Типы шаговых двигателей
По строению различают следующие типы шаговых двигателей:
Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре.
Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока.
По типу обмотки шаговый двигатель может быть униполярным и биполярным.
Преимущества шаговых двигателей
• Главное преимущество шагового двигателя – это точность величины шага.
• Шаговый двигатель может быть быстро запущен и также быстро остановлен. Для выполнения этих действий требуется минимальное время.
• Обладает высокой надежностью. Стабильная работа при высоких нагрузках.
• Нет необходимости в датчиках или других элементах, обеспечивающих обратную связь. Позиционирование полностью определяется поступающими импульсами.
• Большой диапазон скоростей, в том числе возможность достижения низких скоростей.
• Доступная цена.
• Простота в установке и использовании.
Подключение шагового двигателя к печатным платам Arduino
Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике. Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два – к другой.
Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один – к ее середине. Эти провода подключаются к заземлению.
В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент. Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода.
При этом для контроллера не имеет значение, какой способ подключения выбран. В обоих случаях управление производится через два выхода для каждой обмотки.
Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент.
Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем.
Питание шагового двигателя
Рекомендуется использовать внешний источник питания 5-12 В, в противном случае ресурсов платы Arduino может оказаться недостаточно.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем
Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой #include.
Библиотека Accel Stepper обладает большими возможностями. Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора.
После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки. Для этого необходимо задать количество шагов для одного оборота вала.
Драйвер
Также для управления шаговым двигателем используется драйвер. Драйвер позволяет управлять мощными двигателями, ток на которые соответственно поступает с внешнего источника питания.
Импульсы, поступающие на двигатель, формирует микроконтроллер. Для усиления этих импульсов и используется драйвер.
Функции драйвера
Прежде всего, драйвер нужен, чтобы обеспечить поступление тока на обмотки статора. Также драйвер отвечает за коммутацию обмоток и выполняет защитные функции. Тип драйвера влияет на мощность на валу двигателя.
На сегодняшний день существует большой выбор драйверов для шаговых двигателей, например, L293, ULN2003, A3967SLB и многие другие.
Возможные сложности
Перегрев шагового двигателя. Рабочая температура двигателя может достигать 80°C, но это еще не означает, что двигатель перегревается. Если температура мотора превышает 80°C, то только тогда можно говорить о перегреве. В случае перегрева первым делом нужно проверить, какой рабочий ток выставлен на драйвере, соответствует ли он номинальному току двигателя. Можно снизить питающее напряжение, но это приведет к снижению крутящего момента, и соответственно скажется на работе двигателя. В крайнем случае, на корпус двигателя можно установить радиатор и/или вентилятор.
Пропуск шагов. Это достаточно распространенная неприятность, связанная с работой шаговых двигателей. Причины могут быть разные. Вот некоторые из них.
• Некачественный драйвер. Если драйвер неоригинальный, то он не всегда может справиться с непростым управлением шаговым двигателем.
• Ошибки в настройке драйвера. Например, ошибочно выставленное напряжение.
• Перегрузка двигателя. В этом случае нужно проверить, действительно ли двигатель подходит для тех целей, в которых он используется. Вероятно, нужно снизить скорость двигателя или использовать более габаритную модель.
Выбор шагового двигателя
К основным параметрам, по которым производится выбор двигателя, относятся: производитель, габариты двигателя, тип двигателя, ток фазы и индуктивность. Как правило, лучше работают двигатели с меньшей индуктивностью.
Заключение
Шаговые двигатели – эффективное решение, если нужно достичь точного перемещения в пространстве. Они представляют собой бюджетную альтернативу сервоприводу. Благодаря уже созданным библиотекам ими легко управлять. Преимущества шаговых двигателей очевидны, поэтому они являются востребованным продуктом на рынке электронных устройств.
Шаговые двигатели – Основы поиска и устранения неисправностей, часть 1
Автор: Nippon Pulse America
Вы когда-нибудь брали двигатель и обнаруживали, что у него на несколько проводов больше, чем вы ожидали? Если это так, то, вероятно, это был шаговый двигатель. Шаговые двигатели обычно используются в ряде продуктов, от наручных часов до принтеров, от внутривенных насосов до газовых насосов. Они также используются в станках, системах управления технологическими процессами, ленточных и дисковых накопителях и программируемых контроллерах.
Обычные шаговые двигатели с постоянными магнитами (PM) представляют собой жестяные банки или зубчатые двигатели. Они работают на реакции между ротором с постоянными магнитами и электромагнитным полем.
Как бы ни были распространены шаговые двигатели, существует много путаницы в отношении различий между униполярными и биполярными шаговыми двигателями, а также в том, как работают приводы с шаговыми двигателями постоянного тока и постоянного напряжения.
Эта серия, состоящая из двух частей, охватывает наиболее важные этапы поиска и устранения неисправностей любой системы шагового двигателя. Он будет включать в себя обзор шаговых двигателей — что они из себя представляют, как они работают, и как их устранять. Во второй статье также будет рассмотрена электроника, необходимая для запуска шагового двигателя, и предоставлена дополнительная информация об устранении неполадок.
Основы
Шаговый двигатель преобразует электронные импульсы в механическое движение. Каждый электронный импульс «шаг» заставляет вал поворачиваться на определенное количество градусов (угол шага). Таким образом, шаговый двигатель может работать в приложении с разомкнутым контуром, где он будет перемещаться на определенное расстояние с определенной скоростью без обратной связи.
Шаговый двигатель может бесконечно поддерживать удерживающий момент, когда ротор остановлен, без перегорания обмоток двигателя. Когда шаговый двигатель имеет устойчивый сигнал постоянного тока, подаваемый на одну обмотку статора, ротор преодолевает остаточный крутящий момент и выровняется с этим полем статора. Удерживающий крутящий момент — это величина крутящего момента, необходимая для перемещения ротора на один полный шаг при включенном статоре.
Шаговый двигатель преобразует электронные импульсы в механическое движение. Каждый импульс «шаг» заставляет вал поворачиваться на определенное количество градусов (угол шага), обеспечивая работу без обратной связи.
Когда на обмотки не подается питание, между постоянным магнитом и статором возникает небольшая магнитная сила. Эта магнитная сила называется остаточным или фиксирующим моментом. Его можно заметить, повернув шаговый двигатель вручную, и обычно он составляет около одной десятой от удерживающего момента.
В типичной однофазной последовательности шагов для двухфазного двигателя фаза A двухфазного статора находится под напряжением (шаг 1). Это магнитно блокирует ротор в показанном положении, потому что разные полюса притягиваются. Когда фаза А выключена, а фаза В включена, ротор поворачивается на 90° по часовой стрелке. На шаге 3 фаза B отключается, а фаза A включается, но с обратной полярностью по сравнению с шагом 1. Это приводит к еще одному повороту на 90°. На шаге 4 фаза A отключается, а фаза B включается с обратной полярностью по сравнению с шагом 2. Повторение этой последовательности заставляет ротор вращаться по часовой стрелке за 90° шагов.
Вот типичная последовательность шагов для двухфазного двигателя.
Существует три основных типа шаговых двигателей: с постоянными магнитами (PM), с переменным сопротивлением (VR) и гибридные.
Шаговый двигатель с постоянными магнитами (ПМ) работает на реакции между ротором с постоянными магнитами и электромагнитным полем. Одними из наиболее распространенных двигателей с постоянными магнитами являются жестяные или зубчатые двигатели. В шаговых двигателях из жестяных банок вал ротора окружен магнитом с радиально противоположными полюсами. У него нет зубов. Статор представляет собой ряд полюсов с намотанными проволочными катушками. Из-за магнита ротор будет сопротивляться движению, даже если двигатель обесточен.
Шаговые двигатели с постоянными магнитами используются в недорогих устройствах с низким энергопотреблением. Устройство подачи банкнот внутри торговых автоматов приводится в действие шаговым двигателем с постоянными магнитами.
Шаговый двигатель с переменным сопротивлением (VR) отличается от шагового двигателя с постоянными магнитами тем, что он не имеет ротора с постоянными магнитами и остаточного крутящего момента, удерживающего ротор в одном положении при выключении. Этот тип двигателя работает по принципу минимизации сопротивления вдоль пути приложенного магнитного поля. Одним из первых применений шаговых двигателей с переменным магнитным сопротивлением было перемещение указателей направления торпедных аппаратов и орудий на британских военных кораблях в 1919 г.20-е годы. Вскоре после этого они были использованы ВМС США для аналогичной цели.
Гибридный шаговый двигатель состоит из двух кусков мягкого железа, а также круглого ротора, намагниченного в осевом направлении. Он называется гибридным, потому что двигатель работает по комбинированным принципам шаговых двигателей с постоянными магнитами и с переменным сопротивлением.
Структура сердечника статора гибридного двигателя практически такая же, как у его аналога VR. Основное отличие состоит в том, что в двигателе VR только одна из двух катушек одной фазы намотана на один полюс, в то время как в типичном гибридном двигателе катушки двух разных фаз намотаны на один полюс.
В этом поперечном сечении двухфазного гибридного двигателя каждый полюс покрыт равномерно расположенными зубьями, смещенными относительно друг друга на половину шага зубьев. Взаимодействие магнитного поля постоянного магнита и магнитного поля, создаваемого статором, создает крутящий момент.
Две катушки на полюсе намотаны по схеме, известной как бифилярное соединение. Каждый полюс гибридного двигателя покрыт равномерно расположенными зубьями из мягкой стали. Зубья на двух секциях каждого стержня смещены друг относительно друга на половину шага зубьев. Крутящий момент создается в гибридном двигателе за счет взаимодействия магнитного поля постоянного магнита и магнитного поля, создаваемого статором. Большинство гибридных шаговых двигателей представляют собой двигатели размера NEMA. Обмотки для степперов бывают двух типов: биполярные и униполярные. Каждый тип обмотки имеет ряд преимуществ.
Двухфазная пошаговая последовательность, описанная ранее, использует «биполярную обмотку катушки». Каждая фаза состоит из одной обмотки. Это называется биполярной обмоткой, потому что ток в катушках протекает в обратном направлении. При изменении направления тока в обмотках меняется электромагнитная полярность.
Униполярную обмотку иногда называют четырехфазным шаговым двигателем. Он состоит из двух обмоток на полюсе, соединенных таким образом, что при включении одной обмотки создается магнитный северный полюс; когда другая обмотка находится под напряжением, создается южный полюс. Он называется однополярным, потому что электрическая полярность или ток, протекающий от привода к катушкам, никогда не меняется на противоположный.
Что может выйти из строя с шаговыми двигателями
В общем, есть четыре вещи, которые могут выйти из строя с двигателем: они сгорают, выходят из строя щетки, выходят из строя подшипники или их ломает техник.
Они сгорают. Важной характеристикой шагового двигателя является то, что он может поддерживать удерживающий момент в течение неопределенного времени, когда ротор остановлен. Если шаговый двигатель заглохнет, маловероятно, что он сгорит, как это бывает с большинством двигателей переменного и постоянного тока. Если двигатель сгорел, это указывает на проблему с драйвером. (Мы рассмотрим, почему это так, в следующей статье.) Просто замена двигателя приведет к тому, что двигатель снова сгорит. Это не распространенная проблема с шаговыми двигателями, если нет плохого драйвера.
Пример биполярной обмотки и пример униполярной обмотки. В биполярной обмотке ток, протекающий по катушкам, меняется на противоположный, что меняет электромагнитную полярность. В униполярной обмотке электрическая полярность или протекание тока никогда не меняются местами, отсюда и название униполярная.
Щетки выходят из строя. В шаговом двигателе нет щеток. Поэтому это никогда не будет причиной отказа.
Подшипники выходят из строя. Чем холоднее двигатель, тем дольше прослужат подшипники. Однако иногда подшипники выходят из строя. Тем не менее, это не частая проблема. Подшипники в большинстве недорогих двигателей рассчитаны на 3000 часов и более, а в большинстве высококачественных двигателей — на 9 часов.от 0000 до 100000 часов.
Техник их ломает. Это самая распространенная причина выхода из строя шаговых двигателей. При работе с этими устройствами будьте осторожны с ними. С ними не нужно обращаться как с тонким фарфором, но не пытайтесь починить их молотком. В большинстве недорогих двигателей используется клей для крепления вала к ротору, а в большинстве качественных шаговых двигателей используются канавки вместе с клеем.
Для проверки двигателя сначала используйте омметр. Он укажет, сгорела ли обмотка и какой у вас тип шагового двигателя, обычно биполярный или униполярный.
У биполярного пациента всегда четыре отведения. Однополярный будет иметь пять или шесть отведений. Если пять отведений, два общих провода соединяются. Некоторые двигатели будут иметь восемь выводов; эти двигатели могут быть подключены как униполярные или биполярные.
С помощью омметра проверьте сопротивление обмоток. На биполярке сопротивление обеих обмоток должно быть одинаковым в обоих направлениях. В однополярной обмотке сопротивление от каждой фазы к ком должно быть одинаковым в обоих направлениях. После того, как вы проверили двигатель с помощью омметра, вы можете использовать 9Батарея V, чтобы ускорить двигатель. Это подтвердит, что обмотки двигателя в порядке. Для помощи можно использовать диаграммы на рис. 9.
Вы можете провернуть двигатель вручную, прислушиваясь к неисправным подшипникам. Все двигатели с постоянными магнитами и гибридные шаговые двигатели будут иметь некоторый фиксирующий момент. У PM будет больше, чем у гибридных степперов. Если выводы шагового двигателя соприкасаются, фиксирующий момент будет сильно преувеличен. Будь осторожен! Некоторые технические специалисты ошибочно связывают это с неисправными подшипниками. Если подшипники плохие, в двигателе обычно будет дополнительный осевой люфт. Если возможно, сверьтесь с заведомо исправным двигателем.
При замене двигателя многие задаются вопросом о цветовом коде проводов. Помните, обмотки составляют электромагнит. Пока у вас правильно сгруппированы обмотки (фазы 1 и 3 вместе и фазы 2 и 4 вместе), худшее, что может случиться, когда вы начнете запускать двигатель, это то, что он будет работать в обратном направлении. Для исправления просто поменяйте местами один набор фаз (1 и 3 или 2 и 4).
Некоторые шаговые двигатели имеют восемь выводов; эти двигатели могут быть подключены как униполярные или биполярные.
В следующий раз мы рассмотрим различия между биполярными и однополярными обмотками и то, как работают приводы шаговых двигателей с постоянным током и постоянным напряжением. И ответьте на вопрос, почему я использую двигатель на 5 В, когда у меня есть питание на 24 В? DW
Nippon Pulse America
www.nipponpulse. com
Рубрики: Управление движением • управление двигателем, Двигатели • шаговый двигатель
С тегами: nipponpulse
Шаговые двигатели, которые вам нужны — все о шаговых двигателях
0001
Скачать PDF
Мощные возможности высоконадежных шаговых двигателей
Шаговые двигатели часто ошибочно воспринимают как меньшие из серводвигателей, но на самом деле они очень надежны, как и серводвигатели. Двигатель работает за счет точной синхронизации с импульсным сигналом, поступающим от контроллера к приводу, обеспечивая высокоточное позиционирование и управление скоростью. Шаговые двигатели обладают высоким крутящим моментом и низкой вибрацией на низких скоростях, что идеально подходит для приложений, требующих быстрого позиционирования на небольшом расстоянии.
Все, что вам нужно знать о шаговых двигателях
«Шаговые двигатели? Серводвигатели должны иметь лучшую производительность». Это типичный ответ на вопрос о шаговых двигателях. Очевидно, существует серьезное заблуждение о шаговых двигателях. Фактически, шаговые двигатели использовались в различных приложениях, таких как передовое оборудование и доступные автоматизированные инструменты. В этой статье объясняются причины постоянного выбора шаговых двигателей. Некоторые читатели могут сказать, что никогда раньше не видели шагового двигателя. Шаговые двигатели используются во многих приложениях и отраслях промышленности в качестве приводных систем, требующих высокоточного управления, таких как автоматизация производства (FA), производственное оборудование для полупроводников, ПФД и солнечных панелей, медицинские устройства, аналитические приборы, прецизионные столики, финансовые системы, машины для упаковки пищевых продуктов и регулировка апертурной диафрагмы для камер.
Почему вы используете шаговый двигатель?
Простота в использовании: 34%
Недорого: 17%
Простые операции: 16%
Нет необходимости в настройке: 12%
Другое: 21%
Ключевые моменты: простота использования, простые операции и низкая стоимость
Согласно опросу пользователей шаговых двигателей, многие отдают предпочтение шаговым двигателям из-за их «простоты использования», «простых операций» и «низкой стоимости». «вытекает из структуры и конфигурации системы. Вполне логично, что многие пользователи находят в шаговых двигателях такие положительные стороны благодаря простой структуре и конфигурации системы. Однако некоторые читатели могут скептически относиться к реальным характеристикам двигателя с точки зрения его точности и крутящего момента. Нелегко полностью понять всю идею, если нет примеров сравнения с другими управляющими двигателями, такими как серводвигатели. Зная характеристики и применяя различные подходы в зависимости от требуемых операций, шаговые двигатели, безусловно, могут снизить стоимость оборудования. Характеристики и техническая информация шаговых двигателей поясняются ниже:
Впечатляющая «Точность остановки». Быстро перемещается в «диапазоне низких/средних скоростей»
Шаговые двигатели обладают замечательной точностью остановки, и возможно точное управление с разомкнутым контуром. Например, при использовании серии RK II для позиционирования поворотного стола точность его остановки составляет ±0,05° (без нагрузки). Поскольку ошибки положения остановки не накапливаются между шагами, возможно позиционирование с высокой точностью. Конструкция шагового двигателя, не требующая энкодера, обеспечивает простую систему привода и низкую стоимость.
Точка 1
Фантастическая точность остановки
Например, при преобразовании точности остановки ±0,05° шагового двигателя в шарико-винтовой механизм:
Условия эксплуатации:
• Двигатель: серия RK II
• Ход шарико-винтовой передачи : 10 мм
Точность остановки: ±1,4 мкм
Обычно точность шлифованных шариковинтовых пар составляет ±10 мкм. При использовании катаного шарико-винтового типа его точность снижается до ±20 мкм, что указывает на то, что точность остановки шагового двигателя намного выше, чем у шарико-винтовых передач.
Высокий крутящий момент в диапазоне низких/средних скоростей — еще одна замечательная особенность шаговых двигателей. Одной из основных особенностей серводвигателей является создание постоянного крутящего момента в диапазоне средних и высоких скоростей. Серводвигатели подходят для операций с длинным ходом (много оборотов). С другой стороны, характеристики крутящего момента шаговых двигателей не являются плоскими. Кривая крутящего момента в диапазоне низких/средних скоростей становится очень высокой, а в диапазоне высоких скоростей становится очень низкой. Помимо стабильного вращения в диапазоне низких скоростей, с которым борются серводвигатели, шаговые двигатели могут обеспечивать высокий крутящий момент в требуемом диапазоне скоростей для операций с коротким ходом (меньшее количество оборотов), поэтому они подходят для выбора желаемого угла шага для многократного вращения. таблицы и толчковые приложения. Это происходит из-за короткого времени позиционирования при работе с коротким ходом, поэтому двигатель замедляется и останавливается до достижения максимальной скорости. Иными словами, скоростные характеристики обычно не требуются.
Высокая скорость отклика и отличная синхронизация
Третьей замечательной особенностью шаговых двигателей является быстродействие. Управление без обратной связи, которое отправляет односторонние команды двигателю, имеет высокий механизм отслеживания команд. В то время как серводвигатели, которые ожидают обратной связи от энкодера, как правило, имеют «задержки» с командами, шаговые двигатели работают синхронно с импульсом. Таким образом, очень мало «задержек», что приводит к отличному отклику. По этой причине шаговые двигатели подходят для приложений, требующих синхронной работы нескольких двигателей. Одним из примеров является приложение для перемещения досок, в котором требуется два конвейера с одним двигателем, установленным соответственно, для перемещения досок между двумя конвейерами.
Точка 2
Отличный диапазон низких/средних скоростей!
Пример: Крутящий момент двигателя с размером корпуса 85 мм эквивалентен номинальному крутящему моменту серводвигателя мощностью 400 Вт при 1000 об/мин.
Крутящий момент в еще более низком диапазоне скоростей может быть до 5 раз выше. Для позиционирования на коротких дистанциях важно иметь высокий крутящий момент в диапазоне низких/средних скоростей.
Точка 3
Высокая оперативность!
Подходящие области применения
Помимо толчкового режима с частыми пусками и остановами, шаговые двигатели подходят для позиционирования процессоров проверки изображений, которые не любят вибраций, кулачковых приводов, которые трудно регулировать с помощью серводвигателей, и механизмов с низкой жесткостью, таких как как ременная передача. Кроме того, стоимость значительно снижается за счет замены шарико-винтовой передачи на ременную.
Преимущество великолепных характеристик
Помимо снижения затрат, шаговые двигатели имеют много преимуществ с точки зрения производительности. На следующей диаграмме показано преобразование крутящего момента примера серии RKII в крутящий момент типичных диапазонов мощности сервоприводов. Ниже приводится подробная информация о шаговых двигателях, такая как базовая структура, система и примеры приложений, для получения дополнительной информации о шаговых двигателях.
Основы шаговых двигателей
Принцип действия и структура
Шаговый двигатель вращается с фиксированным шагом, как секундная стрелка часов. Высокоточное позиционирование может быть выполнено с управлением без обратной связи благодаря механической конструкции внутри двигателя.
Точное позиционирование (количество шагов)
При полном управлении вращением и скоростью простая конструкция шаговых двигателей достигается без использования электрических компонентов, таких как энкодер внутри двигателя. По этой причине шаговые двигатели очень прочны и имеют высокую надежность с очень небольшим количеством отказов. Что касается точности остановки, ±0,05° (без учета кумулятивных погрешностей тангажа) является очень точным. Поскольку позиционирование шаговых двигателей осуществляется с помощью управления без обратной связи и управляется намагниченным статором и магнитным ротором с маленькими зубьями, шаговые двигатели имеют более высокий механизм отслеживания команд, чем у серводвигателей. Кроме того, при остановке шаговых двигателей не происходит рывков. Они также отлично подходят для ременных передач, которые имеют низкую жесткость.
Полезно для управления скоростью и положением
Когда импульсы вводятся в драйвер через генератор импульсов, шаговые двигатели позиционируются в соответствии с количеством входных импульсов. Базовый угол шага 5-фазных шаговых двигателей составляет 0,72° и 1,8° для 2-фазных шаговых двигателей. Скорость вращения шагового двигателя определяется скоростью частоты импульсов (Гц), заданной драйверу, и можно свободно изменять скорость вращения двигателя, просто изменяя количество входных импульсов или частот драйвера. Шаговые двигатели служат не только в качестве двигателей управления положением, но и в качестве двигателей управления скоростью с высокой синхронизацией.
Шаговые двигатели Применение:
• Высокочастотное повторяющееся позиционирование с фиксированным углом шага
• Позиционирование, требующее длительного времени остановки из-за регулировки ширины и т. д.
• Колеблющиеся нагрузки и изменяющаяся жесткость
• Позиционирование, которое делится на 1 цикл
• Двигатель валы, требующие синхронной работы
Операционная система
Простое управление без датчика или обратной связи
Поскольку можно выполнять точное позиционирование и управление положением при синхронизации с количеством командных импульсов и скоростью, нет необходимости в устройствах , такие как датчик, для позиционирования. Таким образом, вся система проста в построении. Если расширенное управление, такое как операция интерполяции, не требуется, рекомендуется использовать встроенный драйвер функционального типа контроллера. Стоимость снижается за счет отказа от контроллеров, таких как генератор импульсов и модули позиционирования ПЛК.
Встроенный датчик с замкнутым контуром
Несмотря на то, что позиционирование с высокой точностью возможно при управлении без обратной связи, что произойдет, если возникнет проблема? Чтобы избежать таких ловушек, можно использовать двигатель типа энкодера или встроенный датчик с замкнутым контуром управления (серия AR).
Можно ли дополнительно снизить стоимость?
Общая проблема среди инженеров-конструкторов — снижение затрат. Неужели нет возможности еще больше снизить стоимость? Чтобы выяснить, было ли проведено испытание на снижение затрат с улучшением технических характеристик на основе шарико-винтового механизма. Ниже поясняются детали теста:
Миссия
Механизм линейного перемещения
1. Дальнейшее увеличение скорости
2. Дальнейшее снижение стоимости
[Состояние первоначально запланированного оборудования] Механизм: ШВП + серводвигатель шага, показанные справа, определяются на основе серводвигателя, прикрепленного с помощью шарико-винтовой пары и стальной пластины.
План
Замена механизма на ременный шкив
• Шариковый винт при попытке увеличить скорость => Ременной механизм может быть более подходящим => 1000 мм/сек до 1500 мм/сек возможна с ременным механизмом. Замените на ремень, если нет проблем с точностью позиционирования. • Значительно снизить стоимость, если возможен переход на ремень => Ремень стоит недорого, но его низкая жесткость может повлиять на стабильность работы серводвигателя даже при автоматической настройке.
Проблемы
1. Разница в точности остановки между винтом и лентой… Какая требуется точность остановки?
2. Влияние низкой жесткости… Влияние на время установления, устранение проблем с настройкой
• Лучшая точность остановки с помощью винта. На ремень поменять не проблема? => Требуемая точность остановки приложения составляет ± 0,05 ~ 0,1 мм, что не так точно, как для винта. Поэтому с заменой ремня все в порядке.
• При переходе на ремень жесткость механизма снижается, поэтому движения серводвигателя становятся нестабильными. => Среди двигателей позиционирования шаговые двигатели не имеют встроенного энкодера. По этой причине они не требуют регулировки и обладают низкой жесткостью. Их движения стабильны независимо от колеблющихся нагрузок. Если выход одинаковый, рассмотрите шаговые двигатели.
Оценка
Механизм: Ременный шкив + Двигатель: Попробуйте с шаговым двигателем
• Транспортируемая масса -> Макс. допустимая нагрузка 7 кг • Скорость передвижения -> Увеличена до 800 мм/с Двигатель => Замена шагового двигателя на серводвигатель снижает затраты на 50%! Механизм => Заменив шарико-винтовой механизм на ременный, стоимость снижена на 7%!
Результаты
Было много возможностей для снижения затрат!
Проведя проверку механизма с нуля, а также выбрав двигатель на основе характеристик, нам удалось улучшить технические характеристики и снизить стоимость, даже несмотря на то, что размер двигателя стал немного больше. В прошлом выбор двигателя производился на основе его простоты использования или знакомства с ним. После этого упражнения стали ясны различия в работе серводвигателей и шаговых двигателей. Удивительно, что шаговые двигатели оказались более доступными, чем ожидалось. Должны быть возможности для снижения стоимости других устройств, использующих этот метод. Это упражнение еще раз подтвердило, что хорошо сбалансированный выбор между техническими характеристиками двигателя и его стоимостью при максимальном увеличении характеристик двигателя является ключевым.
Что имеет более высокую точность остановки — шаговый двигатель или серводвигатель?
Запрос клиента: Ищет двигатель с хорошей точностью остановки. Насколько велика разница между шаговыми двигателями и серводвигателями?
Допущение: Серводвигатель переменного тока серии NX оснащен 20-битным энкодером, поэтому он должен иметь высокое разрешение и хорошую точность остановки.
Во-первых, необходимо уточнить разницу между разрешением и точностью остановки: Разрешение — это количество шагов на один оборот, его также называют углом шага для шаговых двигателей. Это необходимо при рассмотрении того, насколько точным должно быть требуемое позиционирование. Точность остановки — это разница между фактической позицией остановки и теоретической позицией остановки.
Означает ли это, что серводвигатель переменного тока, оснащенный высокоточным энкодером, имеет лучшую точность остановки, чем шаговые двигатели?
Не совсем. В прошлом не было проблем с концепцией «точность останова серводвигателей, равная разрешению энкодера в пределах ± 1 импульса». Однако последние серводвигатели оснащены 20-битным энкодером (1 048 576 шагов) с очень высоким разрешением. Из-за этого ошибки из-за точности установки энкодера имеют огромное влияние на точность остановки. Поэтому понятие точности остановки немного начало меняться.
Согласно сравнительным таблицам, точность остановки шаговых двигателей и серводвигателей переменного тока почти одинакова (±0,02º ~ 0,03º). Точность зависит от механической точности двигателя для шаговых двигателей, поэтому, если положение остановки может быть выполнено с шагом 7,2º, позиционирование всегда выполняется одними и теми же маленькими зубьями на роторе в соответствии со структурой двигателя. Это позволяет дополнительно повысить точность остановки.
Однако шаговые двигатели могут создавать угол смещения в зависимости от значения крутящего момента нагрузки. Кроме того, в зависимости от состояния механизма серводвигатели переменного тока могут иметь большую ширину колебания в ответ на регулировку усиления. По этим причинам требуется некоторая осторожность.
Сравнение точности останова шаговых двигателей и серводвигателей переменного тока
Как тестировать шаговые двигатели
- Главная
- Библиотека
- Автомобильные пошаговые испытания
- Шаговые двигатели
Изделия, подходящие для этого управляемого теста*
Набор датчиков для обратного штифта
£34.00
Большие зажимы типа «дельфин/аллигатор»
*В Pico мы всегда стремимся улучшить нашу продукцию. Инструменты, использованные в этом пошаговом тесте, могли быть заменены, а вышеперечисленные продукты являются нашими последними версиями, используемыми для диагностики неисправности, задокументированной в этом тематическом исследовании.
Целью этого теста является исследование сигналов позиционирования шагового двигателя дроссельной заслонки при различных оборотах холостого хода двигателя.
Как выполнить тест
См. инструкции по подключению.
- Используйте данные производителя, чтобы идентифицировать переключаемые клеммы заземления на многоконтактном разъеме шагового двигателя.
- Запустите двигатель и дайте ему поработать на холостом ходу.
- Свернуть страницу справки. Вы увидите, что PicoScope отобразил образец сигнала и настроен на захват вашего сигнала.
- Запустите осциллограф, чтобы увидеть данные в реальном времени.
- Подключить Канал PicoScope A . поочередно проверяя каждую из коммутируемых цепей заземления.
- С вашими осциллограммами на экране остановите осциллограф.
- Остановите двигатель и выключите зажигание.
- Используйте инструменты Waveform Buffer, Zoom и Measurements для изучения формы сигнала.
Примечание
В зависимости от типа двигателя может быть до четырех сигнальных цепей.
Температура двигателя должна быть ниже нормальной рабочей температуры для регистрации сигнала холодного холостого хода.
Пример сигнала
Примечания к форме волны
Шаговый двигатель или шаговый двигатель представляет собой небольшое электромеханическое устройство, позволяющее изменять положение схемы перепуска воздуха или открытия дроссельной заслонки в зависимости от величины индексации шагового двигателя.
Всегда будет использоваться для управления скоростью холостого хода, когда не используется клапан управления холостым ходом. Шаговый двигатель может управлять цепью «байпаса воздуха», имея 4 или 5 соединений обратно с электронным модулем управления (ECM). Заземление позволяет блоку управления перемещать двигатель в несколько «шагов», а контакты замыкаются на массу через ECM.
Шаговый двигатель также может быть прикреплен к корпусу дроссельной заслонки. Небольшой стержень управления перемещается на рычаг дроссельной заслонки и очень точно регулирует открытие дроссельной заслонки.
Отдельные цепи заземления можно проверить с помощью осциллографа. Формы сигналов должны быть одинаковыми на каждом пути. Различия могут быть замечены между различными системами.
Библиотека сигналов
Перейдите к строке раскрывающегося меню в нижнем левом углу окна Библиотека сигналов и выберите, Напряжение шагового двигателя холостого хода .
Дополнительные указания
Шаговый двигатель или шаговый двигатель представляет собой небольшое электромеханическое устройство, позволяющее изменять положение схемы перепуска воздуха или открытия дроссельной заслонки в зависимости от величины индексации шагового двигателя. Неизменно он будет использоваться для управления скоростью холостого хода, когда клапан управления скоростью холостого хода не используется.
Ниже описаны два популярных типа:
4-проводной шаговый двигатель
В 4-проводном шаговом двигателе первая цепь, представляющая собой набор контактов, известна как переключатель слежения за холостым ходом. Другая цепь управляется ECM, но только когда переключатель холостого хода замкнут. Второй контур поддерживает холостой ход, когда двигатель горячий или холодный.
Когда двигатель холодный, обороты холостого хода увеличиваются для преодоления характеристик холодного двигателя. Когда дроссельная заслонка отпущена, шаговый двигатель медленно возвращает скорость к холостому ходу, чтобы двигатель не заглох.
Четыре клеммы следующие:
Контакт 1 является возвратом переключателя холостого хода и будет разомкнут на холостом ходу.
Контакт 2 является сигналом переключателя холостого хода и снова размыкается на холостом ходу.
Контакт 3 — это положительный сигнал шагового двигателя при пяти вольтах.
Контакт 4 — отрицательный сигнал шагового двигателя.
При тестировании должно быть сопротивление от 4 до 6 Ом между контактами 3 и 4. Между контактами 1 и 2 должна быть бесконечность при закрытой дроссельной заслонке и замкнутая цепь при открытой дроссельной заслонке.
5-проводной шаговый двигатель
Шаговый двигатель может управлять схемой «байпаса воздуха», имея питание 12 В и последовательность из 4 цепей заземления, как показано на рис. 2. Эти заземления позволяют блоку управления перемещать двигатель в серия «шагов», и контакты заземляются на массу через ECM.
Шаговый двигатель также может быть прикреплен к корпусу дроссельной заслонки, небольшой стержень управления будет перемещаться на рычаг дроссельной заслонки и очень точно регулировать открытие дроссельной заслонки.
При использовании в любом из этих двух примеров, он поддерживает холостой ход и предотвращает замедление двигателя независимо от электрических или механических нагрузок. Этот компонент также отвечает за повышенные обороты холостого хода при холодном двигателе.
Диагностические коды неисправностей
Выбор диагностических кодов неисправностей (DTC), связанных с компонентами
P1554 Регулятор холостого хода Поз. Основные условия настройки не выполнены
P1559 Регулятор скорости холостого хода Поз. Неисправность адаптации
P1564 Регулятор холостого хода Поз. Низкое напряжение во время адаптации
P1565 Нижний предел положения дроссельной заслонки управления холостым ходом не достигнут
P1568 Регулятор холостого хода Поз. механическая неисправность
P1579 Контроллер холостого хода Поз. Адаптация не началась
P1581 Регулятор холостого хода Поз. Базовая настройка не выполнена
P1789 Вмешательство на холостом ходу Цирк. Сообщение об ошибке от системы управления двигателем.
GT040-EN
Отказ от ответственности
Этот раздел справки может быть изменен без уведомления. Информация внутри тщательно проверяется и считается достоверной. Эта информация является примером наших исследований и выводов и не является окончательной процедурой.
Pico Technology не несет ответственности за неточности. Каждое транспортное средство может быть разным и требует уникального теста
настройки.
Помогите нам улучшить наши тесты
Мы знаем, что наши пользователи PicoScope умны и креативны, и мы будем рады получить ваши идеи по улучшению этого теста. Нажмите кнопку Добавить комментарий , чтобы оставить отзыв.
Добавить комментарий
4.3. Настройка и тестирование шагового двигателя
В этом разделе объясняется, как настроить и протестировать двигатель через USB с помощью программного обеспечения Tic Control Center. Рекомендуется протестировать мотор через USB таким образом, чтобы убедиться, что мотор работает и что вы можете получить от него желаемую производительность, прежде чем подключать другой тип входа к Tic и пытаться использовать его для управления. мотор.
Если вы изменили какие-либо настройки вашего Tic, вам, вероятно, следует сбросить Tic до его настроек по умолчанию, открыв меню «Устройство» и выбрав «Восстановить настройки по умолчанию». Затем перейдите на вкладку «Настройки ввода и двигателя» и убедитесь, что для параметра «Режим управления» установлено значение «Последовательный / I²C / USB» (по умолчанию).
Настройки двигателя Tic можно найти в поле «Мотор». На этом снимке экрана показаны настройки по умолчанию для Tic T825:
Настройки двигателя по умолчанию для Tic T825. |
|---|
Различные модели Tic имеют различные доступные пошаговые режимы, ограничения тока и режимы затухания. Tic T249 имеет дополнительные настройки для настройки функции Active Gain Control (AGC), а Tic 36v4 имеет дополнительные настройки, управляющие различными параметрами синхронизации драйвера, как описано в разделе 6.
Установка ограничения тока
ограничивается Tic или вашим источником питания, мы рекомендуем установить ограничение тока Tic на номинальный ток вашего двигателя. Вы должны убедиться, что текущий лимит не превышает то, что Tic может постоянно выдавать, как показано в этой таблице.
| Тик Т500 Тик Т834 Тик Т825 | Тик Т249 | Тик 36v4 | |
|---|---|---|---|
| Непрерывный ток на фазу: | 1500 мА | 1800 мА | 4000 мА |
Кроме того, убедитесь, что ограничение тока не превышает половины номинального тока источника питания вашего двигателя (хотя это не всегда необходимо, и может работать более высокое ограничение тока, как описано в разделе 4. 1). Вы также должны убедиться, что настроенный предел тока Tic никогда не превышает номинальный ток вашего шагового двигателя.
Ограничение тока указывается в Tic Control Center в миллиамперах (мА), что составляет одну тысячную часть ампера (ампера). Поэтому, если вы хотите установить ограничение по току на 0,9 А, введите «900» в поле «Ограничение по току». Обратите внимание, что ограничение тока может быть установлено только на определенные значения. После того, как вы введете текущее ограничение, центр управления будет использовать ближайшую допустимую настройку, которая меньше или равна введенному вами текущему ограничению. Вы можете использовать стрелки вверх и вниз для просмотра действующих настроек ограничения тока. Различные модели Tic имеют разные наборы допустимых ограничений по току.
Предупреждение Tic 36v4: Tic 36v4 не имеет значимого отключения при перегреве (хотя микросхема драйвера затвора имеет защиту от перегрева, первыми перегреваются внешние МОП-транзисторы). Перегрев может привести к необратимому повреждению привода двигателя. Мы настоятельно рекомендуем вам не увеличивать настройку ограничения тока выше 4000 мА (или ниже в приложениях с пониженным тепловыделением), если только вы не убедитесь, что температура полевых МОП-транзисторов останется ниже 140 °C. По умолчанию Tic не позволит вам установить ограничение тока выше 4000 мА, но вы можете переопределить это, установив флажок «Включить неограниченные ограничения тока».
Проверка двигателя в первый раз
После установки ограничения тока нажмите «Применить настройки». В нижней части окна должно появиться сообщение «Двигатель обесточен из-за нарушения безопасного пуска. Нажмите «Возобновить», чтобы начать». Нажмите зеленую кнопку «Возобновить», чтобы включить шаговый двигатель. Если все пойдет хорошо, выбранный вами ток начнет протекать через катушки, а сообщение в нижней части экрана должно измениться на «Вождение».
Если ваш блок питания не может обеспечить достаточный ток, его напряжение может упасть, когда вы нажмете кнопку «Возобновить». Tic обнаружит, что VIN упал слишком низко, сообщит об ошибке «Низкий VIN» и обесточит двигатель. Нижний порог VIN для каждого Tic показан в этой таблице.
| Тик Т834 | Тик Т500 | Тик Т249 | Тик 36v4 | Тик Т825 | |
|---|---|---|---|---|---|
| Низкий порог VIN: | 2,1 В | 3,0 В | 5,5 В | 5,8 В | 7,0 В |
Если это происходит в вашей системе, вы увидите, что Tic кратковременно запускает двигатель, а затем переключается обратно в предыдущее состояние, когда двигатель обесточен из-за нарушения безопасного пуска. Вы также можете посмотреть на вкладке «Статус», чтобы увидеть, произошла ли ошибка «Низкий VIN»: счетчик рядом с этой ошибкой будет ненулевым и будет увеличиваться каждый раз, когда вы нажимаете «Возобновить». Если напряжение вашего источника питания составляет от 2,1 В до 2,3 В или падает до этого уровня при включении двигателя, Tic T834 может сообщить об ошибке «Драйвер двигателя» (вызванной ошибкой блокировки DRV8834 при пониженном напряжении) без сообщения «Низкое напряжение». Ошибка ВИН». Неподходящий источник питания также может вызвать другие проблемы, такие как нарушение связи USB или сброс Tic. Если в вашей системе возникают подобные проблемы, вам следует попробовать получить более качественный источник питания или снизить ограничение по току, чтобы решить эти проблемы, прежде чем продолжить.
Затем перейдите на вкладку «Статус» и используйте интерфейс «Установить цель» в нижней части этой вкладки, чтобы дать команду мотору перейти в другое целевое положение. Если установлен флажок «Установить цель при изменении ползунка или поля ввода», вы можете перемещать шаговый двигатель, просто перетаскивая полосу прокрутки. Вы должны убедиться, что ваш шаговый двигатель может вращаться в обоих направлениях. Если шаговый двигатель не двигается должным образом, вы должны отключить питание двигателя, проверить все ваши соединения (и паяные соединения, если применимо) и повторить попытку.
Проверка нагрева
После того, как вы запустили двигатель, вы можете дать двигателю постоять некоторое время, чтобы увидеть, насколько сильно нагреваются двигатель и Tic. В отличие от двигателя постоянного тока, шаговые двигатели потребляют энергию и выделяют тепло, когда они не движутся. После того, как ваша система нагреется и достигнет устойчивого состояния, если двигатель или Tic нагреваются больше, чем вам хотелось бы, вы можете рассмотреть возможность снижения ограничения тока.
Предупреждение: Этот продукт может нагреться настолько, что вы можете обжечься задолго до того, как чипы перегреются. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Настройка пошагового режима
Параметр «Пошаговый режим» управляет разрешением микрошагов Tic. В режимах «Полный шаг» и «Полный шаг 100%» через обе катушки всегда протекает одинаковая величина тока, и каждый раз, когда Tic делает шаг, он меняет направление тока в одной из катушек. Существует только четыре возможных состояния тока катушки в полношаговом режиме, как показано на диаграмме ниже, и если в документации вашего двигателя указано, что он имеет 200 шагов на оборот, это означает, что для поворота на 360 градусов требуется 200 таких полных шагов.
Допустимые переходы тока катушки в полношаговом режиме. Стрелки вправо соответствуют одному направлению вращения двигателя, а стрелки влево — другому. |
|---|
Другой способ представить это с помощью графика токов катушки для каждого из четырех полных шагов, где одна ось представляет ток фазы (или катушки) A, а другая ось представляет ток фазы B. Для режима «Полный шаг», где на каждую катушку всегда приходится примерно 70% настроенного предела тока, этот график выглядит следующим образом:
Токи катушки для четырех (4) ступеней, составляющих полношаговый режим (I 1-4 ). |
|---|
В других доступных пошаговых режимах Tic использует микрошаги вместо полных шагов для создания магнитных полей, которые указывают места между полными шагами. Каждый микрошаг соответствует 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 или 1/256 полного шага, в зависимости от того, какой пошаговый режим вы выберете. Например, если вы выберете 1/32, то для перемещения на то же расстояние, что и один полный шаг, потребуется 32 микрошага, а двигателю с 200 шагами на оборот потребуется 6400 микрошагов, чтобы повернуться на 360 градусов. На следующем графике показаны токи катушек для каждого микрошага в 1/4-шаговом режиме:
Токи катушки для 16 микрошагов, составляющих 1/4-шаговый режим (I 1-16 ). |
|---|
На приведенном выше графике токи I 3 , I 7 , I 11 и I 15 соответствуют четырем токам полного шага, где величина тока через обе катушки равна . Все остальные шаги указывают между этими полными шагами, устанавливая разные пределы тока для двух катушек. Самый крайний пример этого происходит на шагах I 1 , I 5 , I 9 и I 13 , где ток через одну катушку равен полному пределу тока, установленному на Tic, а ток через другую катушку равен нулю.
- Модель Tic T500 поддерживает только полный, 1/2, 1/4 и 1/8 ступенчатый режимы.
- Tic T825 Tic T834 и Tic T249 поддерживают полный режим, 1/2, 1/4, 1/8, 1/16 и 1/32 шага.
- Tic T249 поддерживает режим «Полный шаг 100 %» вместо обычного полношагового режима , а также дополнительно поддерживает режим «1/2 шага 100%». В этих двух «100%» режимах любой ненулевой ток катушки составляет 100% от номинального тока вместо 70% (как в обычном полном и полушаговом режимах). Эти режимы иногда называют «некруговыми».
- Tic 36v4 поддерживает полный, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 и 1/256 шаговые режимы.
Числа скорости, скорости, ускорения и замедления Tic выражены в микрошагах, которые также называются импульсами. Поэтому, если вы измените пошаговый режим, вам, возможно, придется изменить эти другие настройки, чтобы учесть это изменение. Например, максимальная скорость по умолчанию для Tic составляет 200 импульсов в секунду. Если вы измените пошаговый режим с полного шага на полушаг, вам придется изменить скорость до 400 импульсов в секунду, чтобы сохранить ту же угловую скорость изменения. Поскольку пошаговый режим влияет на эти другие параметры, рекомендуется сначала установить его.
Установка режима затухания (только T825, T834 и 36v4)
Tic T825, Tic T834 и Tic 36v4 имеют настройку режима затухания, которая влияет на скорость затухания тока через катушки двигателя на каждом шаге.
- Tic T825 имеет три режима затухания: медленный, смешанный (по умолчанию) и быстрый.
- Tic T834 имеет пять режимов затухания: медленный, смешанный 25%, смешанный 50% (по умолчанию), смешанный 75% и быстрый.
- Tic 36v4 имеет шесть режимов затухания: медленный, медленный/смешанный, быстрый, смешанный, медленный/автоматический и автоматический смешанный (по умолчанию).
Режим затухания имеет наибольшее значение при использовании микрошага. Какой режим затухания является наиболее подходящим, зависит от многих факторов, характерных для конкретной системы шагового двигателя, включая сопротивление и индуктивность двигателя, подаваемое на двигатель напряжение и желаемую скорость. Как правило, использование медленного затухания создает меньше электрических и звуковых шумов, но может привести к пропуску микрошагов при уменьшении тока катушки. Быстрое затухание намного шумнее как в электрическом, так и в звуковом плане, но оно создает микрошаги более равномерного размера. Смешанное затухание представляет собой комбинацию быстрого и медленного затухания, которое пытается минимизировать шум, сохраняя при этом микрошаги как можно более равномерными. Для получения дополнительной информации о режимах затухания и методах управления током драйвера шагового двигателя Tic см. техническое описание DRV8825 (перенаправление 1k) для Tic T825 или техническое описание DRV8834 (перенаправление 1k) для Tic T834.
По умолчанию Tic 36v4 настроен на использование автоматического смешанного затухания. В этом режиме драйвер автоматически выбирает медленное или быстрое затухание в зависимости от фактического тока двигателя. Это сочетает в себе некоторые преимущества как медленного, так и быстрого затухания, и должно хорошо работать в большинстве ситуаций, но вы можете выбрать другой режим затухания, если автоматическое микширование не является оптимальным для вашей системы. Режимы затухания, отмеченные косой чертой (/), указывают на различное поведение для шагов увеличения и уменьшения тока; например, параметр «Медленный/смешанный» использует медленное затухание для шагов, где ток увеличивается, и смешанное затухание, когда ток уменьшается. Для получения дополнительной информации о режимах затухания Tic 36v4, а также о дополнительных настройках параметров синхронизации, которые могут повлиять на их работу, обратитесь к техническому описанию микросхемы драйвера затвора DRV8711 (перенаправление 1k) и к разделу 6. 9.0005
Режим затухания Tic T500 не настраивается. Tic T500 имеет автоматический выбор режима затухания, используя внутреннее измерение тока для автоматической настройки режима затухания по мере необходимости, чтобы обеспечить наиболее плавную форму волны тока. Для получения дополнительной информации см. техническое описание MP6500 (1 МБ в формате pdf).
Режим затухания Tic T249 не настраивается. В Tic T249 используется технология Advanced Dynamic Mixed Decay (ADMD) от Toshiba, которая динамически переключается между режимами медленного и быстрого затухания в зависимости от фактического тока двигателя, обеспечивая более высокую эффективность и более плавные шаги на высокой скорости, чем при традиционном смешанном затухании на основе синхронизации. Для получения дополнительной информации см. TB67S249.Спецификация FTG (533k pdf).
Настройка активного управления усилением (только T249)
Микросхема TB67S249FTG на Tic T249 поддерживает функцию активного управления усилением (AGC) Toshiba, которая автоматически снижает ток шагового двигателя ниже установленного предела в зависимости от фактической нагрузки на двигатель, позволяя для снижения ненужного тепловыделения и повышения пиковой мощности, когда это действительно необходимо двигателю. Функция АРУ по умолчанию отключена, но вы можете включить ее и настроить с помощью настроек АРУ на вкладке «Ввод и настройки двигателя». Дополнительные сведения об этих настройках см. в разделе 6.
Настройка параметров движения
После того, как вы установили режим шага двигателя, ограничение тока, режим затухания и настройки АРУ (если применимо), вы должны установить его максимальную скорость и максимальное ускорение.
Tic представляет скорости (неотрицательные значения, указывающие величину скорости), скорости (значения со знаком, указывающие скорость и направление) и ограничения скорости в импульсах (микрошагах) за 10 000 (десять тысяч) секунд. Tic может отправлять до 50 000 импульсов (микрошагов) в секунду, поэтому максимально допустимая настройка скорости составляет 500 000 000. Однако ваш двигатель может быть не в состоянии двигаться так быстро. Если вы хотите получить максимально возможную скорость от вашего двигателя, вам, возможно, придется провести несколько тестов, чтобы увидеть, насколько быстро он может работать. Для этого установите максимальную скорость 500 000 000 в «Настройках ввода и двигателя» и нажмите «Применить настройки». Затем перейдите в поле «Установить цель» на вкладке «Статус», выберите «Установить скорость» и введите меньшие числа в поля на концах полосы прокрутки, определяющие ее диапазон. Например, попробуйте ввести -4 000 000 и 4 000 000, что будет означать, что полоса прокрутки может устанавливать целевые скорости от -400 импульсов в секунду до +400 импульсов в секунду, как показано ниже.
Поле «Установить цель» в Центре управления Tic с диапазоном, установленным на плюс или минус 400 импульсов в секунду. |
|---|
Попробуйте медленно перетащить полосу прокрутки к обоим концам ее диапазона. Если ваш двигатель способен развивать желаемую скорость без пауз и пропусков, вы можете увеличить диапазон полосы прокрутки и повторить попытку. Экспериментируя с полосой прокрутки скорости, вы сможете получить представление о том, на что способен ваш мотор. Сделав это, вернитесь на вкладку «Ввод и настройки двигателя» и установите «Максимальную скорость» соответствующим образом.
Вероятно, вам также придется настроить параметр «Максимальное ускорение». Tic представляет пределы ускорения и замедления в импульсах в секунду за 100 секунд. Пределы ускорения и замедления определяют, насколько скорость (в единицах 10 000 импульсов в секунду) может увеличиваться или уменьшаться за одну сотую секунды (0,01 с или 10 мс). Чтобы установить предел ускорения, вы можете подумать, сколько времени вы хотите, чтобы Tic разгонялся от состояния покоя до полной скорости. Если вы хотите, чтобы это заняло одну секунду, установите максимальное ускорение равным одной сотой от максимальной скорости.
В отличие от двигателя постоянного тока, который самостоятельно разгоняется до некоторой максимальной скорости при подаче напряжения, скорость шага должна постепенно увеличиваться контроллером, если вы хотите достичь высоких максимальных скоростей. Если вы просто резко прыгнете на высокую скорость шага, инерция стационарного ротора не позволит ему угнаться за вращающимся магнитным полем, и он останется позади; результатом этого является то, что он будет просто сидеть или вибрировать на месте (или, возможно, даже начнет двигаться назад). Параметр максимального ускорения Tic ограничивает скорость увеличения частоты шагов, что при правильной настройке даст ротору время, чтобы не отставать от магнитного поля, поскольку он вращается все быстрее и быстрее (до некоторой максимальной скорости, которая в конечном итоге зависит от ваших действий). конкретного шагового двигателя, а также настройки ограничения тока, напряжения питания и нагрузки на выходе шагового двигателя).
По умолчанию предел замедления Tic такой же, как предел ускорения. Если вы хотите, чтобы скорость замедления была другой, вы можете снять флажок «Использовать максимальное ограничение ускорения для замедления».
Параметр «Начальная скорость» определяет скорость, ниже которой пределы замедления и ускорения не соблюдаются. Например, если вы установите начальную скорость на 1000000 (100 импульсов в секунду), то Tic сможет мгновенно изменить любую скорость в диапазоне от -1000000 до +1000000 на любую другую скорость в этом диапазоне. Установка начальной скорости может позволить вам сделать вашу систему быстрее, поскольку она не будет тратить время на ускорение или замедление на низких скоростях, где это не требуется.
Все, что вам нужно знать о шаговых двигателях
Это руководство является частью нашего центра промышленной автоматизации , где вы можете узнать больше об искусственном интеллекте, автоматизации и управлении.
В этом руководстве мы кратко рассмотрим, как именно работает шаговый двигатель, прежде чем перейти к рассмотрению некоторых из наиболее распространенных примеров, доступных на рынке, и многочисленных видов повседневных ролей, которые они выполняют. лучше всего подходит для.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой тип бесщеточного синхронного двигателя постоянного тока, который, в отличие от многих других стандартных типов электродвигателей , не просто непрерывно вращается в течение произвольного числа оборотов до тех пор, пока не будет отключено подаваемое на него постоянное напряжение. .
Вместо этого шаговые двигатели представляют собой тип цифрового устройства ввода-вывода для точного пуска и останова. Они сконструированы таким образом, что ток, проходящий через них, попадает на серию катушек, расположенных по фазам, которые можно включать и выключать в быстрой последовательности. Это позволяет двигателю совершать часть оборота за раз, и эти отдельные заранее определенные фазы мы называем «шагами».
Шаговый двигатель предназначен для разбиения одного полного оборота на несколько гораздо меньших (и практически равных) частичных оборотов. В практических целях их можно использовать для указания шаговому двигателю двигаться на заданные градусы или углы поворота. Конечным результатом является то, что шаговый двигатель можно использовать для передачи мельчайших точных движений механическим частям, требующим высокой степени точности.
Шаговые двигатели обычно имеют цифровое управление и являются ключевыми компонентами системы позиционирования с управлением движением без обратной связи. Они чаще всего используются в приложениях удержания или позиционирования, где их способность устанавливать гораздо более четко определенные положения вращения, скорости и крутящие моменты делают их идеально подходящими для задач, требующих чрезвычайно строгого контроля движения.
Как работают шаговые двигатели?
В обычном коллекторном двигателе постоянного тока напряжение подается на клеммы, что, в свою очередь, заставляет проволочную катушку вращаться со скоростью внутри корпуса с фиксированным магнитом («статор»).
В этой установке катушка с вращающейся проволокой («ротор») фактически становится электромагнитом и быстро вращается в центре двигателя на основе знакомого принципа магнитного притяжения и отталкивания. Комбинация щеток (электрических контактов) и поворотного электрического переключателя, известного как коммутатор, позволяет быстро менять направление тока, идущего к проволочной катушке. Это создает непрерывное однонаправленное вращение катушки ротора до тех пор, пока на сборку подается достаточное напряжение.
Потенциальным недостатком этого типа двигателя является то, что он вращается непрерывно и делает произвольное количество оборотов, пока не отключится питание. Из-за этого очень сложно контролировать точную точку остановки двигателя, что делает его непригодным для приложений, требующих более точного управления. Ручное управление включением/выключением подачи мощности на двигатель не может обеспечить требуемую точность старт-стоп для выполнения движений с точностью до минуты.
В шаговом двигателе установка совсем другая. Вместо ротора с проволочной катушкой, вращающегося внутри неподвижного корпуса магнитов, шаговые двигатели построены с фиксированным корпусом из проволоки (в данном случае статором), расположенным вокруг ряда «зубчатых» электромагнитов, вращающихся в центре. Шаговый двигатель преобразует пульсирующий электрический ток, управляемый драйвер шагового двигателя , в точные одношаговые движения этого зубчатого компонента, похожего на шестерню, вокруг центрального вала.
Каждый из этих импульсов шагового двигателя перемещает ротор на один точный и фиксированный шаг полного оборота. Поскольку ток переключается между проволочными катушками, расположенными последовательно вокруг двигателя, вращающаяся часть может совершать полные или частичные обороты по мере необходимости, или ее можно заставить очень резко останавливаться на любом из шагов вокруг ее вращения.
В конечном счете, реальная сила шагового двигателя по сравнению с обычными коллекторными двигателями постоянного тока заключается в том, что они могут быстро найти известное и повторяемое положение или интервал, а затем удерживать это положение столько времени, сколько потребуется. Это делает их чрезвычайно полезными в высокоточных приложениях, таких как робототехника и печать. Компания Learn Engineering создала приведенное ниже видео, демонстрирующее работу шагового двигателя:
Магазин шаговых двигателей
Типы шаговых двигателей
Продается множество типов шаговых двигателей, и знание того, что делает каждый из различных вариантов, поможет вам решить, какой тип лучше всего подходит для вашего применения.
Биполярный шаговый двигатель
Биполярный шаговый двигатель имеет встроенный драйвер, который использует мостовую схему H для реверсирования тока, протекающего по фазам. При подаче питания на фазы при смене полярности все катушки можно заставить работать, вращая двигатель.
С практической точки зрения это означает, что обмотки катушки лучше используются в биполярном, чем в стандартном униполярном шаговом двигателе (который использует только 50% проволочных катушек в любой момент времени), что делает биполярные шаговые двигатели более мощными и эффективными для работы. . Хотя биполярные шаговые двигатели технически более сложны в управлении, они, как правило, имеют встроенный чип драйвера, который обрабатывает большую часть необходимых инструкций и действий.
Недостатком является то, что изначально они обычно дороже, чем стандартные монополярные версии, потому что 9Униполярные шаговые двигатели 0003 не требуют реверсирования тока для выполнения шаговых функций — это делает их внутреннюю электронику намного проще и дешевле в производстве.
Магазин биполярных шаговых двигателей
Гибридный шаговый двигатель
Гибридные шаговые двигатели обеспечивают еще большую точность благодаря таким методам, как полушаг и микрошаг. Микрошаг — это способ увеличения фиксированного количества шагов в двигателе путем программирования драйвера для отправки на катушки переменного синусоидального/косинусоидального сигнала. Это часто означает, что шаговые двигатели можно настроить так, чтобы они работали более плавно и точно, чем при стандартной настройке.
Гибридные шаговые двигатели обычно имеют полюса или зубья, которые смещены на двух разных чашках снаружи магнитного ротора. Это также означает более точное управление шагами и вращением, а также более тихую работу, более высокое отношение крутящего момента к размеру и более высокие выходные скорости, чем стандартные шаговые двигатели.
Магазин гибридных шаговых двигателей
Для чего используется шаговый двигатель?
Шаговые двигатели имеют широкий спектр применений во многих отраслях и дисциплинах, при этом некоторые из наиболее распространенных применений:
- Компьютеры
- Робототехника
- Камеры
- Печать и сканирование, в том числе на 3D-принтерах
- Автоматизация процессов и упаковочное оборудование
- Позиционирование пилотных ступеней клапана для систем управления жидкостью
- Оборудование для точного позиционирования
В этом разделе мы более подробно рассмотрим некоторые из этих повседневных приложений.
Шаговые двигатели для 3D-принтеров
Общие списки деталей для 3D-принтеров почти всегда включают шаговый двигатель с тем или иным описанием. Это связано с тем, что использование шагового двигателя в 3D-принтере является высокоточным и экономичным способом выполнения очень точных действий и вращений, когда принтер пытается преобразовать информацию с цифровых сканов в физические 3D-объекты.
Шаговые двигатели и драйверы в 3D-принтерах обеспечивают строго контролируемое движение по осям X, Y и Z, по отдельности или одновременно, что означает, что исключительная точность движения и позиционирования достижима без использования энкодеров и другого дополнительного программного обеспечения или датчиков. .
Большинство 3D-принтеров включают в себя несколько шаговых двигателей — они обычно находятся как на самих платформах для сборки, так и в экструдерах нитей, где они используются для протягивания нити и контроля постоянной и равномерной подачи материала в машину на протяжении всего процесса. полная продолжительность тиража.
Шаговые двигатели для ЧПУ
Шаговые двигатели являются альтернативой серводвигателям для питания большинства типов станков с ЧПУ. Приложения ЧПУ включают в себя очень широкий спектр производственных процессов, в которых предварительно запрограммированное компьютерное программное обеспечение управляет работой и физическим перемещением станков в заводских и производственных условиях.
Хотя шаговые двигатели в приложениях с ЧПУ часто рассматриваются как более «бюджетная» альтернатива серводвигателям , это упрощение, основанное на знании старых технологий, которые сегодня не всегда точны. Шаговые двигатели действительно обычно дешевле серводвигателей той же мощности, но современные версии, как правило, столь же универсальны. В результате шаговые двигатели стали гораздо более доступными и используются в гораздо более широком спектре машин и систем, от станков до настольных компьютеров и автомобилей.
Шаговые двигатели с ЧПУ также имеют одно ключевое преимущество перед серводвигателями, заключающееся в том, что им не требуется энкодер. Серводвигатели по своей природе более сложны для понимания и эксплуатации, чем версии с шаговыми двигателями, и часть этой сложности заключается в том, что они включают в себя энкодер, который более подвержен отказам, чем большинство компонентов надежного в остальном серводвигателя. Шаговым двигателям не нужен энкодер, что теоретически делает их более надежными, чем сервоприводы.
Кроме того, тот факт, что шаговые двигатели также являются бесщеточными (в отличие от серводвигателей), означает, что они не требуют регулярной плановой замены при условии, что их подшипники остаются в хорошем рабочем состоянии.
Шаговые двигатели для Raspberry Pi
Шаговые двигатели — чрезвычайно распространенное периферийное устройство для добавления к одноплатным вычислительным модулям Raspberry Pi для домашних энтузиастов, изучающих основы базовых навыков компьютерного программирования.
Стартовые комплекты Raspberry Pi обычно продаются в очень простой конфигурации, при этом идея состоит в том, что отдельный пользователь будет добавлять любые дополнительные компоненты в свою систему в том порядке, в котором он хочет узнать о них, добавляя к своему набору навыков, изучая для управления новыми компонентами с помощью языков программирования, таких как Python.
В сообществе пользователей Raspberry Pi обучение управлению небольшими недорогими шаговыми двигателями очень часто рассматривается как логичный следующий шаг после обучения управлению циклами включения/выключения светодиодов и другими простыми типами переключателей или зуммеров. По сути, последовательно соединив пару таких шаговых двигателей, домашние любители могут приступить к созданию простого и программируемого робота.
На рынке Великобритании доступно множество подходящих типов шаговых двигателей для этого типа приложений, начиная с очень недорогих версий на 5 В, которые легко соединяются с разъемами на материнской плате Raspberry Pi.
Шаговые двигатели для камер
Шаговые двигатели широко используются в различных приложениях в высокотехнологичных камерах. Они используются как для управления высокоточными внутренними компонентами, такими как настройки автофокуса и диафрагмы в объективе, так и в корпусах и внешней механике камер безопасности и систем удаленного мониторинга.
В частности, шаговые двигатели и моторизованные ползунки камеры обеспечивают очень плавную работу устройств позиционирования камеры, а это означает, что кадры, снятые с устройств безопасности, могут быть надежно защищены от потенциально проблематичного искажения изображения, вызванного физическим движением камеры вокруг ее поля зрения. вид.
Шаговые двигатели обладают рядом других привлекательных особенностей для использования в системах позиционирования камер и систем видеонаблюдения, включая полный крутящий момент в состоянии покоя, чрезвычайно точное и мгновенное время отклика на все входные сигналы движения, постоянную повторяемость заранее определенных движений и простое управление без обратной связи, определяемое фиксированные размеры шага.
Резюме
Шаговые двигатели — это невероятно универсальный, надежный, экономичный и точный способ управления точными движениями двигателей, позволяющий пользователям повысить ловкость и эффективность запрограммированных движений в огромном разнообразии приложений и отраслей. Таким образом, они образуют важное и широко используемое подмножество в гораздо более широкой категории автоматика и аппаратура управления .
Поскольку в Великобритании и по всему миру продается так много марок шаговых двигателей, размеров, номинальных крутящих моментов, стилей конструкции и предполагаемых областей применения, при планировании покупки крайне важно точно определить, какая конфигурация лучше всего подходит для конкретных пользовательских сред.
Популярные марки шаговых двигателей
Нажмите на ссылки ниже, чтобы просмотреть коронки некоторых из наших самых популярных марок.
РС ПРО
Sanyo Denki
Portescap
Куда дальше?
Если вы хотите узнать больше о различных типах двигателей или хотите ознакомиться с нашим Центром промышленной автоматизации, просто перейдите по ссылкам ниже.
DC Motors Guide
Руководство по двигателям AC
Промышленная автоматизация
Связаться с США
03457 201201
. 0467
- BOMs
- Calibration
- Delivery option
- Order History
- Quotes
- Returns
- Schedule orders
- DesignSpark
Legal
- Cookie Policy
- Email Security
- Privacy Policy
- Website Terms
- Условия продажи
О компании RS
- О нас
- Карьера
- Группа компаний
- Events Center
- ESG
- Наши сертификаты
- Пресс-центр
- Весь мир
| Анахайм Автоматизация
Что такое шаговый двигатель? Шаговый двигатель (также называемый шаговым или шаговым двигателем) представляет собой электромеханическое устройство, обеспечивающее механические движения посредством преобразования электрических импульсов. Шаговые двигатели управляются цифровыми импульсами, а не постоянным приложенным напряжением. В отличие от обычных электродвигателей, которые вращаются непрерывно, шаговые двигатели вращаются или «шагают» с фиксированными угловыми приращениями. Шаговый двигатель чаще всего используется для управления положением. В конструкции системы шагового двигателя/драйвера/контроллера предполагается, что шаговый двигатель будет следовать цифровым инструкциям. Блок-схема шагового двигателяБлок-схема шагового двигателя Физические свойства шагового двигателя23Y210S-LW8 Шаговый двигатель в разобранном виде Основными компонентами шагового двигателя являются пластины вала, ротора и статора, магниты, подшипники, медные и подводящие провода, шайбы, а также передняя и торцевая крышки. Вал обычно изготавливается из нержавеющей стали, а пластины статора и ротора — из кремнистой стали. Кремниевая сталь обеспечивает более высокое удельное электрическое сопротивление, что снижает потери в сердечнике. Различные магниты, доступные в шаговых двигателях, учитывают множество соображений конструкции. Магниты могут быть из ферритопластика, спеченного феррита и магнитов на связке Nd-Fe-B. Подшипники различаются в зависимости от размера двигателя. Как работает шаговый двигатель? В основном шаговые двигатели используются для управления движением, линейным или вращательным. В случае вращательного движения получение цифровых импульсов в правильной последовательности позволяет валу вращаться дискретными шагами. Импульс (также называемый тактовым или ступенчатым сигналом) может генерироваться микропроцессором, логикой синхронизации, тумблером или замыканием реле. Последовательность цифровых импульсов преобразуется в обороты вала. Для каждого оборота требуется заданное количество импульсов, каждый из которых равен одному поворотному приращению или шагу, что является лишь частью одного полного оборота. Существует множество взаимосвязей между входными импульсами и вращением вала двигателя. Одним из таких взаимосвязей является взаимосвязь между применяемой последовательностью импульсов и направлением вращения. Основные типы шаговых двигателейШаговый двигатель различается в зависимости от приложения по конструкции и функциональности. Тремя наиболее распространенными типами шаговых двигателей являются переменное сопротивление, двигатели с постоянными магнитами и гибридные шаговые двигатели. Шаговые двигатели с переменным сопротивлением (VR) Шаговые двигатели VR имеют несколько роторов из мягкого железа и статор с обмоткой. Обычно они работают по основному принципу: магнитный поток находит путь с наименьшим сопротивлением через магнитную цепь. В общем случае шаговые двигатели VR имеют относительно высокую скорость шага от 5 до 15 градусов и не имеют фиксирующего крутящего момента. Как работает шаговый двигатель VR?Ссылаясь на схему ниже, полюса становятся намагниченными, когда обмотки статора запитываются постоянным током. Когда полюса намагничиваются, зубья ротора притягиваются к полюсам статора, находящимся под напряжением, и вращаются, чтобы выровняться. Как только обмотки вокруг фазы А статора подаются под напряжение, зубья ротора притягиваются к полюсам статора, позволяя полюсам выровняться. Когда обмотки фазы А обесточиваются, а фазы В находятся под напряжением, ротор вращается, чтобы совместить свои зубья с зубьями статора. Этот процесс продолжается последовательно с фазой C, за которой подается питание на фазу D, вызывая вращение ротора. Шаговые двигатели с переменным сопротивлением Краткое описание шаговых двигателей VR:
Шаговые двигатели с постоянными магнитами (PM) Шаговые двигатели с постоянными магнитами состоят из роторов с постоянными магнитами без зубьев, намагниченных перпендикулярно оси вращения. Краткое описание шаговых двигателей с постоянными магнитами:
Гибридные шаговые двигатели Гибридные шаговые двигатели Гибридные шаговые двигатели сочетают в себе качества шаговых двигателей как с VR, так и с постоянными магнитами. Краткий обзор гибридных шаговых двигателей:
ПРИМЕЧАНИЕ. Шаговые мотор-редукторыОсновное различие между отдельными шаговыми мотор-редукторами заключается в их рабочих характеристиках. Основная функция шагового двигателя-редуктора заключается в преобразовании входного сигнала шагового двигателя в выходной сигнал с высоким крутящим моментом и низкими оборотами. Anaheim Automation предлагает цилиндрические шаговые и планетарные мотор-редукторы с различными передаточными числами, длиной пакета и выходным крутящим моментом. Шаговые двигатели со встроенным редуктором Шаговые двигатели с цилиндрическими редукторами Шаговые двигатели, интегрированные с цилиндрическими редукторами, легко доступны, компактны и эффективны. Шаговые двигатели с планетарными редукторами Шаговые двигатели, интегрированные с планетарными редукторами, компактны, эффективны и имеют различную длину пакета. Слово «планетарный» происходит от сходства редуктора с солнечной системой. Эта система состоит из трех основных компонентов: солнечной шестерни, зубчатого венца и двух или более планетарных шестерен. Солнечная шестерня расположена в центре, коронная шестерня является самой внешней шестерней, а планетарные шестерни окружают солнечную шестерню внутри кольцевой шестерни. Как управляются шаговые двигатели?Драйверы шаговых двигателей Шаговый двигатель выполняет преобразование логических импульсов путем последовательной подачи питания на обмотки шагового двигателя; как правило, один подаваемый импульс обеспечивает один шаг вращения двигателя. Точное управление обеспечивается шаговым двигателем , который управляет скоростью и положением двигателя. Шаговый двигатель увеличивает точную величину с каждым управляющим импульсом, преобразуя цифровую информацию в точное приращение вращения без необходимости использования устройств обратной связи, таких как тахометры или энкодеры . Поскольку шаговый двигатель и драйвер представляют собой систему с разомкнутым контуром, устраняются такие проблемы, как фазовый сдвиг контура обратной связи и результирующая нестабильность, характерные для систем серводвигателей. Как выбрать шаговый двигательПри выборе подходящего шагового двигателя учитываются несколько важных критериев:
С адекватными логическими импульсами шаговые двигатели могут быть двунаправленными, синхронными, обеспечивать быстрое ускорение, запуск/остановку и легко взаимодействовать с другими цифровыми механизмами. Благодаря низкому моменту инерции ротора, отсутствию дрейфа и некумулятивной ошибке позиционирования шаговый двигатель является экономичным решением для многих приложений управления движением. Как правило, шаговые двигатели работают без обратной связи по принципу разомкнутого контура и иногда не уступают по производительности более дорогим сервосистемам постоянного тока. Как упоминалось ранее, единственная неточность, связанная с шаговым двигателем, — это некумулятивная ошибка позиционирования, которая измеряется в % угла шага. Прежде чем разработчик системы сможет выбрать наилучшую комбинацию шагового двигателя/драйвера/контроллера для конкретного приложения, необходимо понять требования к движению, нагрузочные характеристики, методы соединения и электрические требования. Хотя задача несложная, при выборе оптимального решения для шагового двигателя необходимо учитывать несколько ключевых факторов. Разработчик системы должен настроить характеристики элементов, находящихся под его/ее контролем, чтобы они соответствовали проектным спецификациям. Anaheim Automation предлагает множество вариантов в своей широкой линейке шаговых двигателей, что обеспечивает максимальную гибкость конструкции. Результатом наличия большого количества опций является высокопроизводительная и экономически выгодная система. Элементы, которые необходимо учитывать, включают выбор шагового двигателя, драйвера и источника питания, а также механическую трансмиссию, такую как зубчатая передача или снижение веса нагрузки за счет использования альтернативных материалов. Инерционные нагрузкиИнерция — это мера сопротивления объекта изменению скорости. Чем больше инерция объекта, тем больший крутящий момент требуется для его ускорения или замедления. Инерция является функцией массы и формы объекта. Разработчик системы может выбрать альтернативную форму или материал с низкой плотностью для оптимальной работы. Если в выбранной системе доступен ограниченный крутящий момент, то время разгона и торможения должно увеличиться. Мы рекомендуем, чтобы отношение инерции системы к инерции ротора не превышало 10:1. Для достижения этого соотношения можно использовать коробку передач. ПРИМЕЧАНИЕ: Отраженная инерция уменьшается на квадрат передаточного числа, а выходная скорость уменьшается на кратное передаточному числу. Фрикционные нагрузки Все механические системы обладают некоторой силой трения. ПРИМЕЧАНИЕ: Некоторое трение желательно, так как оно может сократить время стабилизации и повысить производительность. Разрешение позиционирования Требуемое приложением разрешение позиционирования может влиять на тип используемой передачи и/или выбор драйвера шагового двигателя. Например: ходовой винт с 5 витками на дюйм при полношаговом приводе обеспечивает 0,001 дюйм/шаг; полушаг обеспечивает 0,0005 дюйма/шаг; разрешение микрошага 25 400 шагов/об обеспечивает 0,0000015 дюймов/шаг. Режимы шагового двигателяШаговые двигатели управляются сигналами, которые приближаются к синусоидальным формам сигналов. В шаговых двигателях обычно используются три режима возбуждения: полношаговый, полушаговый и микрошаговый. Шаговые двигатели : в чем разница между полношаговым и полушаговым режимами? Шаговый двигатель — полношаговый (две фазы включены) В полношаговом режиме шаговый двигатель проходит нормальный угол шага, т.е. при 200 шагах/оборотах двигатель поворачивается на 1,8° за полный шаг, а при полушаге двигатель вращается на 0,9°.° за полный шаг. Существует два вида полношаговых режимов: однофазное и двухфазное полношаговое возбуждение. При однофазном полношаговом возбуждении шаговый двигатель работает только с одной фазой, находящейся под напряжением. ПРИМЕЧАНИЕ: Двойное возбуждение обеспечивает примерно на 30–40 % больший крутящий момент, чем одинарное возбуждение, но требует вдвое большей мощности от источника питания привода. Многие микрошаговые драйверы Anaheim Automation могут быть настроены на работу в полношаговом режиме, если это необходимо. Шаговый двигатель — полушаговый В полушаговом режиме возбуждения чередуются однофазные и двухфазные операции, что приводит к шагам, размер которых составляет половину нормального шага. Следовательно, этот режим обеспечивает удвоенное разрешение. В то время как выходной крутящий момент двигателя меняется на разных шагах, это более чем компенсируется необходимостью шага только через половину угла. Этот режим стал наиболее часто используемым Anaheim Automation, начиная с 19-го века.70-х, потому что это почти полностью устраняет возможность возникновения проблем с резонансом. Шаговый двигатель может работать в широком диапазоне скоростей и управлять практически любой часто встречающейся нагрузкой. Хотя полушаговые драйверы по-прежнему популярны и доступны по цене, многие новые микрошаговые драйверы представляют собой экономичные альтернативы. Серия Anaheim Automation BLD76 — популярный полушаговый драйвер, подходящий для широкого спектра шаговых двигателей. Шаговый двигатель: основы микрошагов Шаговый двигатель — микрошаги В микрошаговом режиме естественный угол шага шагового двигателя может быть разделен на меньшие углы. Например, обычный двигатель с углом поворота 1,8 градуса имеет 200 шагов на один оборот. Если двигатель микрошаговый в режиме «деления на 10», то каждый микрошаг перемещает двигатель на 0,18 градуса, что становится 2000 шагов/об. Микрошаги производятся путем пропорционального распределения тока в двух обмотках в соответствии с функциями синуса и косинуса. Этот режим широко используется в приложениях, требующих более плавного движения или более высокого разрешения. ПРИМЕЧАНИЕ: В целом, чем больше предоставленный делитель микрошага, тем дороже будет драйвер. Если вы предпочитаете, Anaheim Automation также производит серию шаговых двигателей со встроенными драйверами , что означает, что шаговый двигатель и драйвер находятся в одном блоке. Такой подход к проектированию исключает возможность догадок о совместимости двигателя и драйвера. Для получения дополнительной информации см. 17MD , 23MD и 34MD Серия . Конфигурация обмоток двигателяВнутренние обмотки шагового двигателя Шаговые двигатели наматываются на полюса статора либо в унифилярной, либо в бифилярной конфигурации. 4-канальное биполярное соединение 6-канальное биполярное соединение 6-канальное биполярное (последовательное) соединение 8-канальное монополярное соединение 8-канальное биполярное (последовательное) соединение 8-канальное биполярное соединение Соединение Формулы для шагового двигателяФормула расчета угла шага Φ = угол шага Шагов в секунду = (об/мин * шагов на оборот) * 60 Резонансная частота, жесткость по крутящему моменту и инерция ω = резонансная частота Преимущества шагового двигателя
*Стоимость изделий с шаговыми двигателями зависит от критериев для каждого применения. Недостатки шагового двигателя
* Резонанс присущ конструкции и работе всех шаговых двигателей и возникает при определенных шагах. Где используются шаговые двигатели? Хотя шаговый двигатель ранее был затмеваем сервосистемами для управления движением, он все чаще становится предпочтительной технологией во многих областях. Основным фактором этой тенденции к шаговым двигателям является преобладание цифрового управления, появление микропроцессора, улучшенные конструкции (например, модели с высоким крутящим моментом) и более низкая стоимость. Линейка экономичных шаговых двигателей Anaheim Automation — разумный выбор как для OEM-производителей, так и для пользователей. Линия привлекает широкий круг клиентов: промышленные компании, разрабатывающие или эксплуатирующие автоматизированное оборудование или процессы, связанные с упаковкой продуктов питания, косметики или медицинских изделий, маркировкой или защитой от несанкционированного доступа, нарезкой по длине, сборкой, конвейером, погрузочно-разгрузочными работами, робототехникой, специальными съемка и проекционные эффекты, медицинская диагностика, устройства слежения за камерами, устройства для проверки и безопасности, средства управления самолетом, управление потоком насосов, изготовление металлов (оборудование с ЧПУ) и модернизация оборудования. Линейка шаговых двигателей объединяет в себе согласованный шаговый двигатель, драйвер и контроллер. Эта концепция дизайна упрощает процесс выбора, тем самым сокращая количество ошибок и время подключения. Благодаря дружелюбному обслуживанию клиентов и профессиональной поддержке приложений Anaheim Automation часто превосходит ожидания клиентов в отношении выполнения спецификаций шаговых двигателей и драйверов, а также других потребностей управления движением. Шаговые двигатели используются во многих отраслях промышленностиШаговые двигатели стали важным компонентом приложений в нескольких отраслях промышленности. Ниже приведен список таких отраслей и их приложений, в которых используются шаговые двигатели: Принадлежности Наряду с шаговыми двигателями Anaheim Automation предлагает полную линейку драйверов и контроллеров, источников питания , мотор-редукторов , редукторов , шаговых двигателей, линейных приводов и 9. Герметичные шаговые двигатели со степенью защиты IP65 Вопросы окружающей среды для шагового двигателя На всех этапах эксплуатации, обслуживания и ремонта системы шагового двигателя необходимо соблюдать следующие соображения по охране окружающей среды и безопасности. Несоблюдение этих мер предосторожности нарушает стандарты безопасности проектирования и производства, а также использование по назначению шагового двигателя, драйвера и контроллера. Атмосфера, в которой используется шаговый двигатель, должна соответствовать общепринятым правилам обращения с электрическим/электронным оборудованием. Не используйте шаговый двигатель в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании на открытом воздухе шаговый двигатель, драйвер и контроллер должны быть защищены от непогоды соответствующим кожухом, при этом они должны обеспечивать достаточный поток воздуха и охлаждение. Влага может создать опасность поражения электрическим током и/или вызвать поломку системы. Следует уделить должное внимание тому, чтобы избегать жидкостей и паров любого рода. Кроме того, предпочтительнее работать с системой шагового двигателя/драйвера/контроллера в нестатической защитной среде. Открытые схемы всегда должны быть должным образом ограждены и/или закрыты, чтобы предотвратить несанкционированный контакт человека с цепями под напряжением. При подаче питания запрещается выполнять какие-либо работы. Не подключайте и не отключайте разъемы при включенном питании. Подождите не менее 5 минут после отключения питания, прежде чем приступить к проверке системы шагового двигателя, потому что даже после отключения питания в конденсаторах внутренней цепи привода все еще остается некоторая электрическая энергия. Планируйте установку шагового двигателя, драйвера и/или контроллера в системе, свободной от мусора, такого как металл от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может попасть внутрь. Примечание: Anaheim Automation поставляет герметичные двигатели со степенью защиты IP65 , предназначенные для использования в неблагоприятных условиях. Срок службы шагового двигателяТипичный срок службы шагового двигателя составляет 10 000 часов работы. Это примерно 4,8 года, учитывая, что двигатель работает одну восьмичасовую смену в день. Срок службы двигателя может варьироваться в зависимости от области применения и условий эксплуатации двигателя. Чтобы определить срок службы шаговых двигателей, необходимо учитывать такие факторы, как рабочий цикл, нагрузка, внецентренная нагрузка и температура. Рабочий цикл представляет собой время, прошедшее между операциями шагового двигателя в часах в день, минутах в час или ходах в минуту. Конечно, более интенсивное использование, вероятно, сократит срок службы шагового двигателя, в то время как более легкое использование будет иметь противоположный эффект. Подшипники, как правило, являются ограничивающим фактором для срока службы шагового двигателя, поскольку они выходят из строя раньше, чем любой другой компонент, который может работать практически бесконечно. Подшипники могут иметь общий срок службы до 20 000 часов. Эта оценка предполагает нормальное использование около восьми часов в день, пять дней в неделю. Таким образом, срок службы шагового двигателя может достигать 10 лет при соблюдении правильных условий эксплуатации и качественных подшипников. Соблюдение ограничений грузоподъемности двигателя поможет сохранить его надежность и срок службы. Воздействие на шаговый двигатель экстремальных температур может значительно снизить общую производительность и срок службы двигателя. Таким образом, управление рабочим циклом, нагрузкой и температурой максимально увеличивает срок службы шагового двигателя. Необходимое обслуживание шагового двигателяПоскольку шаговые двигатели являются бесщеточными, они не требуют обслуживания из-за износа щеток или коллекторов. Проводка шагового двигателя: Следующая информация предназначена в качестве общего руководства по подключению линейки шаговых двигателей Anaheim Automation. Будьте бдительны при прокладке силовой и сигнальной проводки на машине или системе; шумы, излучаемые близлежащими реле, трансформаторами и другими электронными устройствами, могут вноситься в сигналы двигателя и энкодера, входные/выходные коммуникации и другие чувствительные низковольтные сигналы. Это может привести к системным сбоям и ошибкам связи. ПРЕДУПРЕЖДЕНИЕ. В системе шагового двигателя могут присутствовать опасные напряжения, способные привести к травмам или смерти. Строго соблюдайте следующие правила:
ПРИМЕЧАНИЕ. Кабели заводского изготовления рекомендуются для использования в наших системах шаговых двигателей и драйверов. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуются вместо кабелей, изготовленных пользователем, для оптимизации производительности системы и обеспечения дополнительной безопасности для системы и пользователя. ПРЕДУПРЕЖДЕНИЕ – Во избежание поражения электрическим током, выполните монтаж и подключение шагового двигателя и приводной системы до подачи питания. После подачи питания на соединительные клеммы может поступать напряжение. ПРИМЕЧАНИЕ: Всегда читайте спецификацию/руководство пользователя, прилагаемое к каждому продукту. Поиск и устранение неисправностей шагового двигателя Проблема: Прерывистая или неустойчивая работа шагового двигателя или драйвера шагового двигателя. Проблема: Низкая производительность системы (проблемы EMI, двигатель периодически пропускает шаги/низкая повторяемость, двигатель глохнет, неустойчивое поведение двигателя – работает вперед, работает в одном направлении, затем в другом, провода нагреваются, возможно плавятся). Проблема: Шаговый двигатель глохнет. Проблема: Драйвер шагового двигателя больше не работает. Проблема: У шагового двигателя короткое замыкание обмотки или на корпус двигателя. Проблема: Факторы окружающей среды далеки от идеальных. ПРИМЕЧАНИЕ. Подробный список экологических соображений, о которых следует помнить, см. в разделе Установка и окружающая среда . Если для вашего применения требуется сварка или сварка выполняется в одних и тех же рабочих условиях, см. Проблема: Шаговый двигатель вращает драйвер шагового двигателя в обратном направлении. ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки шаговых двигателей, а также всей продукции, производимой или распространяемой Anaheim Automation, предоставляется бесплатно. Свяжитесь с нами : Anaheim Automation имеет легкодоступных инженеров по применению, которые будут рады помочь с устранением большинства проблем. Шаговый двигатель Часто задаваемые вопросы В: Почему важен размер шагового двигателя? Можно ли просто выбрать большой размер двигателя? В: Почему шаговые двигатели теряют крутящий момент при ускорении? В: Почему увеличение напряжения увеличивает крутящий момент, если шаговые двигатели не управляются напряжением? В: Какова максимальная рабочая температура шаговых двигателей? В: Можно ли увеличить крутящий момент, запустив шаговый двигатель с удвоенным номинальным током? В: В чем разница между четырьмя, шестью и восемью проводами в двигателях? В: В чем разница между униполярными и биполярными двигателями? В: В чем разница между контроллером шагового двигателя с разомкнутым и замкнутым контуром? В: Когда следует использовать микрошаг? В: Что делают тормоза в шаговом двигателе? В: В чем разница между круглым и квадратным шаговым двигателем? В: Какова рекомендуемая длина кабеля между шаговыми двигателями Anaheim Automation и драйверами? В: У меня двигатель с 4 проводами плюс провод заземления. Могу ли я подключить его к продуктам Anaheim Automation? В: Если я приложу слишком большую нагрузку к шаговому двигателю, и вал перестанет вращаться, не повредится ли двигатель? В: Продает ли Anaheim Automation энкодеры для шаговых двигателей? В: Каков ожидаемый срок службы шаговых двигателей Anaheim Automation? В: Провод какого сечения следует использовать для шагового двигателя NEMA 34 на расстоянии 10 футов? В: Как изменить направление вращения стандартного круглого шагового двигателя с шестью выводами 23D309S, не используя вход драйвера для направления? В: Может ли разобранный шаговый двигатель стать причиной повреждения? В: Есть ли у Anaheim Automation шаговые двигатели с постоянными магнитами? В: Могу ли я заказать шаговый двигатель с точностью 3% вместо 5%? В: Предлагает ли Anaheim Automation шаговые двигатели на заказ? В: Мне нужен шаговый мотор-редуктор. Предлагает ли Anaheim Automation эти двигатели? В: Производит ли Anaheim Automation шаговые двигатели с подключенными драйверами? В: Есть ли у Anaheim Automation линейные приводы на базе шаговых двигателей?
В: Могу ли я приобрести шаговый двигатель со степенью защиты IP65? В: Почему мой шаговый двигатель вибрирует? В: Почему шаговый двигатель пропускает шаги? В: Почему шаговый двигатель нагревается? Глоссарий шагового двигателя
|