Содержание
Шаговые двигатели с энкодером ШД86
Основные характеристики
Основные характеристики
| Полный шаг двигателя, град | 1,8 |
|---|---|
| Погрешность углового шага, град | ±0,09 |
| Количество выходных каналов | 2 (А, В) или 3 (А, В, I) |
| Разрешение энкодера, им/об | до 1024 |
| Радиальное биение вала не более, мм | 0,02 |
| Осевое биение вала не более, мм | 0,08 |
| Максимально допустимая радиальная нагрузка на вал на расстоянии 20 мм от фланца, Н | 220 |
| Максимально допустимая осевая нагрузка на вал, Н | 60 |
Скачать паспорт
Скачать описание
Заказать
Описание шаговых двигателей с энкодером ШД86
Шаговые двигатели (NEMA 34) с энкодером – предназначены для преобразования электрической энергии во вращательное движение с точным позиционированием. Укомплектованный энкодером шаговый двигатель в совокупности с необходимым органом управления представляет собой сервопривод.
Укомплектованный энкодером шаговый двигатель в совокупности с необходимым органом управления представляет собой сервопривод.
В ассортименте продукции нашей компании, представлены три шаговых двигателя с энкодером, типоразмера NEMA34 (размер фланца 86х86мм). Различие между тремя двигателями в величине крутящего момента, от 34 до 87 кгс*см.
При работе с шаговыми двигателями, оснащенными оптическим энкодером, пользователь получает ряд преимуществ:
- Отслеживание точности позиционирования, до 1024 импульса на один оборот вала
- Отслеживание направления вращения
- Получение информации о возможном пропуске шагов (после анализа данных полученных от энкодера)
- Правильное управление током двигателя в приводах с обратной связью могут устранить проблемы среднечастотного резонанса
Для полноценной работы с шаговыми двигателями серии ШД86‑Э, необходимо применять соответствующие драйверы и контроллеры.
Технические характеристики двигателей
| Модель | Ток фазы, А | Количество фаз | Сопротивление (фаза), Ом | Индуктивность (фаза), мГн | Крутящий момент, кгс*см | Длина, мм | Момент инерции ротора, г*см2 |
|---|---|---|---|---|---|---|---|
| ШД8665‑2.8Э | 2,8 | 4 | 1,4 | 3,9 | 34 | 65 | 1000 |
| ШД8680‑4.2Э | 4,2 | 4 | 0,75 | 3,4 | 46 | 80 | 1400 |
ШД86118‑6. 0Э 0Э | 6,0 | 2 | 0,6 | 6,5 | 87 | 118 | 2700 |
Технические характеристики энкодеров
- Количество выходных каналов: 2 (А, В) или 3 (А, В, I)
- Разрешение энкодера до 1024 им/об
- Рабочая температура: от -40° C до 100° C
- Напряжение питания (Vcc): -0,5В до 7В
- Выходное напряжение: от 0,5В до Vcc
- Выходной ток на канал: от 1,0 мА до 5 мА
Габаритные размеры энкодеров
Для энкодера с одиночным
TTL-сигналом
Для энкодера с дифференциальным
выходным сигналом
Форма выходных сигналов
Направление вращения:
Когда кодовое колесо вращается по часовой
стрелке (если смотреть с торца энкодера),
ведущим становится канал “А”, канал “В” —
ведомый. Если кодовое колесо вращается против
Если кодовое колесо вращается против
часовой стрелки, то ведущим становится канал
“В”, а канал “А” ведомым.
Индексная ширина импульса (Pо) составляет
поворот кодового колеса на 90 градусов.
С этим товаром покупают
SMSD‑4.2LAN
Ethernet контроллер шаговых двигателей
подробнее
SMSD‑8.0LAN
Ethernet контроллер шаговых двигателей
подробнее
SMD‑4.2DIN ver.2
Драйвер шаговых двигателей
подробнее
SMD‑8.
 0DIN
0DINДрайвер шаговых двигателей
подробнее
 0DIN
0DIN Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Вечный энкодер (валкодер) с устойчивыми положениями из шагового двигателя » Журнал практической электроники Датагор
Механический энкодер — вещь удобная в использовании, но он имеет некоторые досадные недостатки. В частности, контакты со временем изнашиваются и приходят в негодность, появляется дребезг. Оптические энкодеры гораздо надежнее, но они дороже, многие из них боятся пыли, и они редко встречаются в таком виде, в котором их удобно было бы использовать в радиотехнике.
Короче, когда я узнал о том, что шаговый двигатель можно использовать как энкодер, эта идея мне очень понравилась.
Практически вечный энкодер! Замучить его невозможно: соберешь раз и можешь энкодить всю жизнь.
Содержание статьи / Table Of Contents
Камрад, рассмотри датагорские рекомендации
🌼 Полезные и проверенные железяки, можно брать
Опробовано в лаборатории редакции или читателями.
Трансформатор R-core 30Ватт 2 x 6V 9V 12V 15V 18V 24V 30V
Паяльная станция 80W SUGON T26, жала и ручки JBC!
Отличная прочная сумочка для инструмента и мелочей
Хороший кабель Display Port для монитора, DP1.4
Конденсаторы WIMA MKP2 полипропилен
Трансформатор-тор 30 Ватт, 12V 15V 18V 24V 28V 30V 36V
SN-390 Держатель для удобной пайки печатных плат
Панельки для электронных ламп 8 пин, керамика
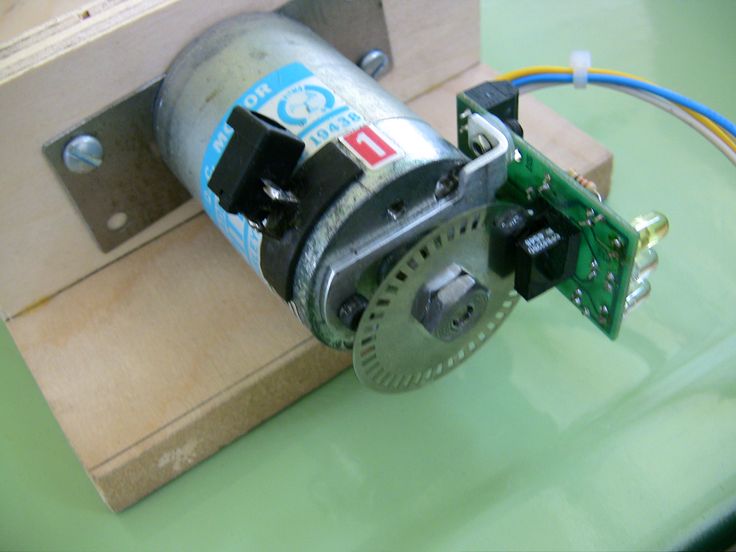
В качестве энкодера я решил попробовать миниатюрный безымянный шаговик из компьютерного дисковода 5. 25 дюйма.
25 дюйма.
Я разобрал несколько дисководов, везде двигатели были разные. Встречались на шлейфе, встречались с косой цветных проводов. На шлейфе общий провод — крайний. Всё остальное находится прозвонкой. По сопротивлению понятно: с выхода на выход сопротивление вдвое больше, чем с выхода на общую точку. А можно даже не прозванивать. Если открутить четыре винта, внутри коммутационная плата, на ней видно, где общий провод.
Исходная схема многократно встречается в Сети в вариациях. Я оттолкнулся от статьи Thomas (OZ2CPU).
Рис. 1 Преобразователь сигналов шагового двигателя в квадратурный код
У неё есть достоинства, но есть и недостатки, об этом далее. Собрал пробный вариант в виде макета, и понял, что ничего не понял
Для начала хотелось бы сразу видеть, в какую сторону происходит шаг. Схема выдавала квадратурный код, как и обычный энкодер. Этот код надо было каким-то образом превратить в мигание светодиода — «правый» или «левый».
Этот код надо было каким-то образом превратить в мигание светодиода — «правый» или «левый».
Разработал и протестировал вот такую схему:
Исключён фрагмент. Полный вариант доступен меценатам и полноправным членам сообщества.
Кстати, эту схему на логике можно использовать и для обычного энкодера, я её и отрабатывал на нём.
Для сборки понадобятся 8 элементов «2И-НЕ», я использовал два чипа 74HC00.
Элемент U2A, диод, конденсатор и U2B создают короткий импульс в момент положительного фронта. Элемент U6D, U4D и U2D — мультиплексор, который пересылает этот испульс либо на один, либо на другой светодиод.
Рис. 3 Диаграмма квадратурного кода
Разумеется, этот же функционал можно сделать на единственном микроконтроллере, но это далеко не для всех доступно и удобно. Всё-таки элементы 2И-НЕ можно найти где угодно, в т. ч. советские (74хх00, К155ЛА3, К555ЛА3).
Последние два инвертора (U5D и U3D) можно выкинуть, ведь ничто нам не мешает подключить светодиоды не к земле, а к плюсу питания.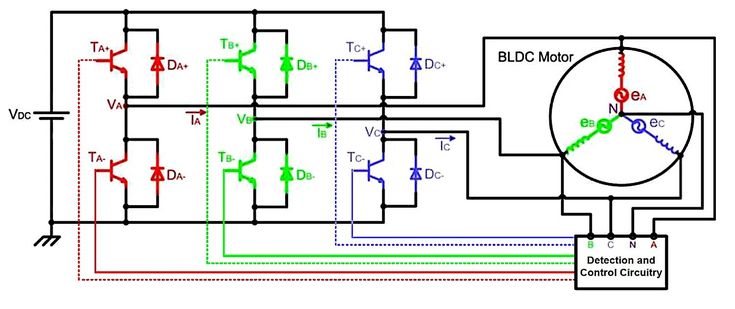 Если крепко пошевелить мозгом, схему можно было бы ещё упростить, но эту задачу оставляем на будущее.
Если крепко пошевелить мозгом, схему можно было бы ещё упростить, но эту задачу оставляем на будущее.
Печатки нет, поскольку всё собиралось только на макетке.
Собираем всё это, и что же мы видим? Схема далеко не всегда работает должным образом.
Исключён фрагмент. Полный вариант доступен меценатам и полноправным членам сообщества.
Жалко, что видео не передает тактильные ощущения на валу!
В целом работа энкодера меня устраивает. Крутить такую «ручку громкости» необычно приятно.
Работа над устройством будет продолжена.
Спасибо за внимание!
Оптические энкодеры для шаговых двигателей — TRINAMIC
TRINAMIC Motion Control представляет новое семейство оптических поворотных энкодеров, оптимизированных для сервоприводов с шаговыми двигателями. Внедрение обусловлено общей тенденцией к энергоэффективным и экономичным сервоприводам с шаговыми двигателями, заменяющими приводы постоянного тока или BLDC, которые полагаются на коробку передач для обеспечения достаточного крутящего момента на низкой скорости, где шаговые двигатели имеют свою силу.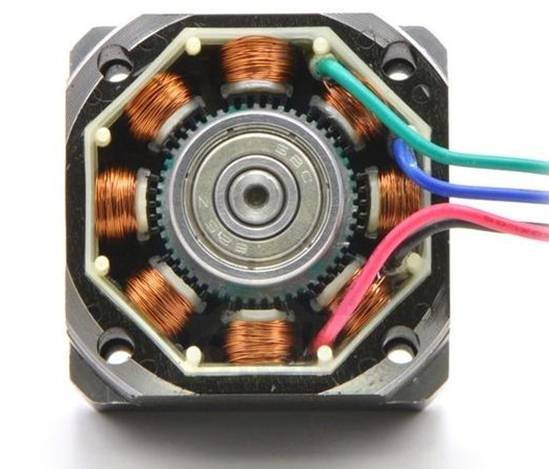
Сервоприводы с шаговым двигателем с управлением по полю становятся все более популярными. Повышение эффективности, точности и надежности определяют эту тенденцию. Для идеального управления им требуются энкодеры с высоким разрешением. В лучшем случае разрешение энкодера кратно разрешению полного шага двигателя. Это позволяет избежать помех между пульсациями крутящего момента двигателя и показаниями энкодера. Разрешение энкодера напрямую влияет на точность положения.
Компания TRINAMIC первой разработала шаговые двигатели с замкнутым контуром для встроенного управления двигателем с помощью микросхемы управления движением с замкнутым контуром TMC4361. Они построили полную линейку интегральных схем управления движением с обратной связью, включая TMC4670, микросхему, обеспечивающую быстрое аппаратно-ориентированное управление двух- и трехфазными двигателями.
Энкодеры предназначены для установки на шаговые двигатели с размером фланца от NEMA11 (20 мм) до NEMA36 (86 мм). Используя отражающие кодовые колеса, они позволяют использовать небольшие и низкопрофильные корпуса.
Используя отражающие кодовые колеса, они позволяют использовать небольшие и низкопрофильные корпуса.
TMCS-20 поставляется с разрешением 32768 и диаметром вала 4 мм для небольших двигателей до NEMA11. TMCS-28 доступен для диаметров вала 5 мм и 6,35 мм, а TMCS-40 — для диаметра вала 6,35 мм. Последние два имеют разрешение 10 000 приращений на оборот.
Применение
- Промышленная автоматизация
- Робототехника
- Изделия медицинские
Оптические поворотные энкодеры
| Изображение | Номер детали производителя | Описание | Доступное количество | Просмотр. | 0 — Немедленно | Подробнее | |
|---|---|---|---|---|---|---|---|
| TMCS-28-6.35-10000-AT-01 | Оптичный энкодер ротационный энкодер 10000ppr | 0-Сразу | Просмотр. | ||||
| TMCS-20-4-8192-AT-01 | ПОВОРОТНЫЙ ЭНКОДЕР ОПТИЧЕСКИЙ 8192PPR | 0 — Немедленно | Подробнее |
Опубликовано: 08.08.2017
Двигатели и энкодеры — Trinamic
Компания Trinamic предлагает широкий выбор двигателей и приводов различных размеров и мощности, которые идеально подходят для вас. Эти приводы QMOT, разработанные для использования с лучшими в отрасли наборами функций, такими как специализированное управление напряжением и током, обеспечивают наилучшие результаты для вашего приложения. Для использования с решениями с замкнутым контуром эти двигатели также предлагаются с энкодерами, установленными сзади.
Популярные благодаря высокому крутящему моменту на низких скоростях и в состоянии покоя, шаговые двигатели являются предпочтительным приводом, когда требуется точное позиционирование. В сочетании с ведущими в отрасли технологиями Trinamic, позволяющими использовать характеристики шагового двигателя в ваших интересах, они преобразуют цифровую информацию в идеальное физическое движение, используя до 51 200 микрошагов на полный оборот.
В сочетании с ведущими в отрасли технологиями Trinamic, позволяющими использовать характеристики шагового двигателя в ваших интересах, они преобразуют цифровую информацию в идеальное физическое движение, используя до 51 200 микрошагов на полный оборот.
| QSh3818-32-07-006 | 11 | 6Ncm | 0.68A | 28mm | 28mm | 32mm |
| QSh3818-51-07-012 | 11 | 12Ncm | 0.68A | 28mm | 28mm | 51mm |
| QSh5218-35-10-027 | 17 | 27Ncm | 1. 00A 00A | 42mm | 42mm | 35mm |
| QSh5218-41-10-035 | 17 | 35Ncm | 1.00A | 42mm | 42mm | 41mm |
| QSh5218-47-28-040 | 17 | 40Ncm | 2.80A | 42mm | 42mm | 47mm |
| QSh5218-51-10-049 | 17 | 49Ncm | 1.00A | 42mm | 42mm | 51mm |
| QSH5718-41-28-055 | 23 | 55Ncm | 57mm | 57mm | 41mm | |
| QSH5718-51-28-101 | 23 | 101Ncm | 2.80A | 57mm | 57mm | 51mm |
| QSH5718-56-28-126 | 23 | 126Ncm | 2.80A | 57mm | 57mm | 56mm |
| QSH5718-76-28-189 | 23 | 189Ncm | 2.80A | 57mm | 57mm | 76mm |
| QSH6018-45-28-110 | 24 | 110Ncm | 60mm | 60mm | 45mm | |
| QSH6018-56- 28-165 | 24 | 165Ncm | 2.80A | 60mm | 60mm | 56mm |
| QSH6018-65-28-210 | 24 | 210Ncm | 2.80A | 60mm | 60mm | 65mm |
| QSH6018-86-28-310 | 24 | 310Ncm | 2.80A | 60mm | 60mm | 86mm |
| QSH8618-96-55-700 | 34 | 700 Нсм | 86 мм | 86 мм | 96 мм |
 8″> 2.80A
8″> 2.80A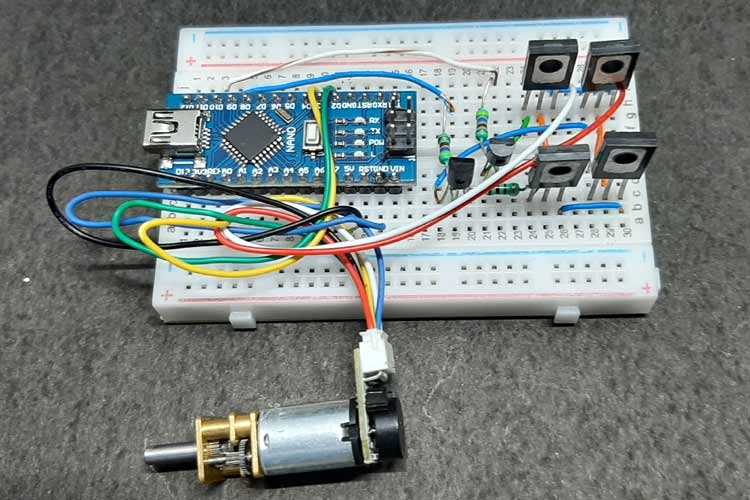 8″> 2.80A
8″> 2.80A 5″> 5.50A
5″> 5.50AДобавленный энкодер поддерживает сервоуправление для повышения эффективности, позволяя использовать двигатели меньшего размера. Кроме того, дополнительный мониторинг позволяет осуществлять профилактическое обслуживание и создавать более надежные конструкции, идеально подходящие для требовательных приложений.
| QSh3818-32-07-006-8k | 11 | 6Ncm | 0.68A | 28mm | 28mm | 47mm |
| QSh3818-51-07-012-8k | 11 | 12Ncm | 28mm | 28mm | 66mm | |
| QSh5218-35-10-027-10k | 17 | 27Ncm | 1.00A | 42mm | 42mm | 53mm |
| QSh5218-51-10-049-10k | 17 | 49Ncm | 1.00A | 42mm | 42mm | 69mm |
| QSH5718-51-28-101-10k | 23 | 101Ncm | 2.80A | 57mm | 57mm | 73mm |
| QSH5718-76-28-189-10k | 23 | 189Ncm | 57mm | 57mm | 98mm | |
| QSH6018-65-28-210-10k | 24 | 210Ncm | 2.80A | 60mm | 60mm | 83mm |
| QSH6018-86-28-310-10k | 24 | 310Ncm | 2.80A | 60mm | 60mm | 104mm |
| QSH6018-86-90-300-10k | 24 | 300Ncm | 9.00A | 60 мм | 60 мм | 104 мм |
 68″> 0.68A
68″> 0.68A 8″> 2.80A
8″> 2.80A
Электродвигатели постоянного тока известны своей долговечностью, эффективностью и управляемостью. Широко используемые во многих приложениях приводы BLDC обеспечивают относительно высокий крутящий момент с хорошим откликом на скорость. Особенно когда они превращаются в сервоприводы с лучшими в отрасли ИС и модулями Trinamic, они представляют собой надежные решения, которые служат всю жизнь.
Широко используемые во многих приложениях приводы BLDC обеспечивают относительно высокий крутящий момент с хорошим откликом на скорость. Особенно когда они превращаются в сервоприводы с лучшими в отрасли ИС и модулями Trinamic, они представляют собой надежные решения, которые служат всю жизнь.
| QBL4208-100-04-025 | 42mm | 25Ncm | 6.94A | 8 | 4000rpm | 42mm | 42mm | 100mm |
| QBL4208-41-04-006 | 42mm | 6.25Ncm | 1.78A | 8 | 4000rpm | 42mm | 42mm | 41mm |
| QBL4208-61-04-013 | 42mm | 3.48A | 8 | 4000rpm | 42mm | 42mm | 61mm | |
| QBL4208-81-04-019 | 42mm | 18.5Ncm | 5.14A | 8 | 4000rpm | 42mm | 42mm | 81mm |
| QBL5704-116-04-042 | 57mm | 42Ncm | 6.68A | 4 | 4000rpm | 57mm | 57mm | 116mm |
| QBL5704-94-04-032 | 57mm | 32Ncm | 5.08A | 4 | 4000rpm | 57mm | 57mm | 94mm |
 5″> 12.5Ncm
5″> 12.5Ncm
Инкрементальные энкодеры являются ключевыми средствами при работе с двигателями BLDC. Они не только повышают производительность приложения, но и освобождают инженеров от растущего давления миниатюризации и энергоэффективности, позволяя использовать диски меньшего размера. Кроме того, двигатели BLDC с энкодерами повышают эффективность за счет сокращения времени простоя до минимума.
Они не только повышают производительность приложения, но и освобождают инженеров от растущего давления миниатюризации и энергоэффективности, позволяя использовать диски меньшего размера. Кроме того, двигатели BLDC с энкодерами повышают эффективность за счет сокращения времени простоя до минимума.
| QBL4208-100-04-025-1k | 42mm | 25Ncm | 7.00A | 8 | 4000rpm | 42mm | 42mm | 118mm |
| QBL4208-61-04-013-1k | 42mm | 13Ncm | 3.50A | 8 | 4000rpm | 42 мм | 42 мм | 79 мм |
Мониторинг приводов не только повышает эффективность приложения, но и сообщает вам о состоянии, в котором они находятся.