Содержание
28.2. Управление скоростью двигателя переменного тока
12/12/2014
0 Комментарии
(* в предыдущем параграфе речь шла об управлении двигателями постоянного тока)
Работа двигателей переменного тока основана на явлении вращения магнитного поля, создаваемого набором стационарных обмоток (называемых обмотками статора), питаемых источником переменного тока с разными фазами. Этот эффект похож на поведение мигающих «бегущих огоньков» в гирлянде, которые создают впечатление «движения» в одном направлении. Если наборы обмоток запитать подобным образом (каждая обмотка достигает пика напряженности поля в разное время относительно соседних) то эффект будет похож на движение магнитного поля в одном направлении. Если эти обмотки расположены по кругу, то движущееся магнитное поле будет вращаться вокруг центра этого круга, как это проиллюстрировано следующими изображениями (читайте слева направо и сверху вниз, как будто вы читаете слова в предложении):
Любой намагниченный предмет, помещенный в центр круга, будет пытаться вращаться с той же угловой частотой, что и магнитное поле. Синхронный двигатель переменного тока использует этот принцип, когда его намагниченный ротор движется с точно той же скоростью, что и магнитное поле.
Синхронный двигатель переменного тока использует этот принцип, когда его намагниченный ротор движется с точно той же скоростью, что и магнитное поле.
В любом электропроводящем предмете (проводнике), помещенном в центр круга, будет возникать индукция при изменении направления магнитного поля вокруг этого проводника. Поле будет индуцировать электрические токи внутри проводника, которые, в свою очередь, будут действовать против вращающегося магнитного поля таким образом, что предмет будет «гнаться» за полем, всегда чуть отставая. Индукционный двигатель переменного тока работает по этому принципу, когда его ненамагниченный (но электропроводящий) ротор вращается со скоростью немного меньшей, чем синхронная скорость* вращающегося магнитного поля.
*Разность этих скоростей называется скоростью скольжения, в русскоязычной литературе применяется термин скольжение, определяющий относительную разность.
Скорость вращения магнитного поля прямо пропорциональна частоте источника переменного тока и обратно пропорциональна числу полюсов в статоре:
S = 120f / n
S – синхронная скорость вращающегося магнитного поля в оборотах в минуту
f – частота в герцах
n – число полюсов статора на одно фазу (простейший возможный индукционный двигатель имеет два полюса)
Отношение между синхронной скоростью, частотой и числом полюсов можно понять по аналогии с «бегущими огоньками»: скорость каждого огонька в гирлянде – это функция частоты мигания и числа лампочек на единицу длины. Если число лампочек удвоить, расположив дополнительные лампочки между имеющимися (так чтобы длина гирлянды не изменилась), видимая скорость сократится вдвое: с сокращением расстояния между парами лампочек потребуется больше циклов («миганий») чтобы «пробежать» гирлянду первоначальной длины. Таким же образом, статор с бОльшим числом полюсов на его окружности требует бОльшего числа циклов от источника питания для совершения магнитным полем полного оборота.
Если число лампочек удвоить, расположив дополнительные лампочки между имеющимися (так чтобы длина гирлянды не изменилась), видимая скорость сократится вдвое: с сокращением расстояния между парами лампочек потребуется больше циклов («миганий») чтобы «пробежать» гирлянду первоначальной длины. Таким же образом, статор с бОльшим числом полюсов на его окружности требует бОльшего числа циклов от источника питания для совершения магнитным полем полного оборота.
Синхронный двигатель переменного тока вращается с точно такой же скоростью, что и магнитное поле: пример из практики – четырехполюсный синхронный двигатель, вращающийся с 1800 оборотами в минуту с приложенным питанием частотой 60 Гц. Индукционный двигатель будет вращаться немного медленней магнитного поля: например, индукционный двигатель вращающийся с 1720 об/мин при питающей частоте 60 Гц (т.е. 80 об/мин – скорость скольжения). Индукционные двигатели проще в производстве и обслуживании, что делает их наиболее популярными из двух типов двигателей, применяемых в промышленности.
В случае когда при производстве статора двигателя число обмоток фиксировано*, частоту источника питания мы можем изменять при помощи электронной схемы. Высокомощная схема, разработанная для изменения частоты питания двигателей переменного тока называется частотным преобразователем (ЧП), а вместе с самим двигателем — частотно-регулируемым приводом (ЧРП).
* существуют многоскоростные двигатели с выбираемым числом полюсов. Например, двигатель с дополнительным числом обмоток статора, который подключается по 4-полюсной схеме для высокой скорости, и по 8-полюсной для низкой. Если нормально нагруженный двигатель имеет на «высокой скорости» 1740 об/мин, то на «низкой» в два раза меньше – 870 об/мин. При фиксированной частоте питания этот двигатель будет иметь только две возможные скорости
Частотно-регулируемые приводы крайне полезны, они позволяют обычному двигателю с фиксированным числом полюсов обеспечивать необходимую мощность в широком диапазоне скоростей. К достоинствам ЧРП следует отнести уменьшение электропотребления (двигатель вращается так быстро как это требуется, а не на полную), уменьшение вибрации (меньше скорость=меньше вибрация, хотя существуют и резонансные явления), возможность плавного разгона и торможения для сокращения износа механических составляющих в результате ускоряющих сил.
К достоинствам ЧРП следует отнести уменьшение электропотребления (двигатель вращается так быстро как это требуется, а не на полную), уменьшение вибрации (меньше скорость=меньше вибрация, хотя существуют и резонансные явления), возможность плавного разгона и торможения для сокращения износа механических составляющих в результате ускоряющих сил.
Другой чертой, присущей большинству частотно-регулируемых приводов является возможность активного торможения нагрузки — это когда ЧРП заставляет двигатель прикладывать отрицательный момент к нагрузке для её замедления. Некоторые частотные преобразователи для энергосбережения позволяют рекуперировать кинетическую энергию в течение процесса торможения.
Преобразователи частоты содержат электронные компоненты преобразующие входное переменное питание с постоянной частотой в выходное с переменной частотой (и напряжением). В преобразователе обычно имеется три различных блока. Выпрямитель использует диоды для преобразования переменного напряжения в постоянное. Фильтр сглаживает выпрямленное напряжение, т.к. оно имеет пульсации. И наконец, инвертор преобразует отфильтрованное постоянное напряжение обратно в переменное, только на этот раз с уровнями напряжения и частоты необходимыми для желаемой скорости вращения двигателя.
Фильтр сглаживает выпрямленное напряжение, т.к. оно имеет пульсации. И наконец, инвертор преобразует отфильтрованное постоянное напряжение обратно в переменное, только на этот раз с уровнями напряжения и частоты необходимыми для желаемой скорости вращения двигателя.
Упрощенная схема для частотного преобразователя показана ниже, выпрямитель слева (преобразует переменное напряжение в постоянное), фильтрующий конденсатор сглаживает выпрямленное напряжение, и транзисторный мост превращает постоянное напряжение в переменное с необходимой частотой*. Схема управления транзисторами опущена для упрощения:
*Обратите внимание на обратно-включенные диоды между стоком и истоком каждого из транзисторов. Эти диоды служат для защиты транзисторов от обратного напряжения, но они также позволяют двигателю «возвращать» энергию назад в шину постоянного тока (действуя как генератор) когда скорость вращения двигателя превышает скорость вращения магнитного поля, что может происходить когда привод дает двигателю команду на останов. При добавлении некоторых компонентов это приводит к некоторым интересным возможностям, таким как регенеративное торможение.
При добавлении некоторых компонентов это приводит к некоторым интересным возможностям, таким как регенеративное торможение.
Как и в приводах двигателей постоянного тока, силовые транзисторы в частотных преобразователях быстро включаются и отключаются с меняющейся скважностью. Однако в отличии от приводов постоянного тока, переключения силовых транзисторов в преобразователях частоты должны быть очень быстрыми чтобы синтезировать синусоиду переменного тока из постоянного, получаемого с шины после выпрямителя. В электронных схемах приводов постоянного тока скважность ШИМ определяет текущую мощность двигателя, и поэтому она остаётся постоянной пока от двигателя требуется постоянная мощность. Но с частотными преобразователями дела обстоят иначе: коэффициент заполнения (величина, обратная к скважности) должен изменяться от нуля до максимума и обратно до нуля, генерируя таким образом ток синусоидальной формы для работы двигателя.
Соответствие между генерируемым быстроменяющимся ШИМ-сигналом и синусоидой показано на рисунке:
Эта концепция быстро переключающихся в соответствии с ШИМ транзисторов позволяет приводу «нарезать» любые произвольные формы сигналов из отфильтрованного постоянного напряжения, получаемого от выпрямителя. Фактически можно синтезировать любую частоту (сверху ограничена максимальной частотой импульсов ШИМ) и любое напряжение (максимум определяется напряжением шины постоянного тока), что даёт ЧРП работать в широком диапазоне скоростей.
Фактически можно синтезировать любую частоту (сверху ограничена максимальной частотой импульсов ШИМ) и любое напряжение (максимум определяется напряжением шины постоянного тока), что даёт ЧРП работать в широком диапазоне скоростей.
Не смотря на то, что управление частотой – это ключ к управлению скоростью синхронного или индукционного двигателя, самого по себе его не достаточно. В то время как скорость двигателя переменного тока является прямой функцией частоты (она по сути определяет то, как быстро магнитное поле вращается по окружности статора), момент почти пропорционален току в обмотках статора. А поскольку обмотки статора по своей природе являются индуктивностями, то их реактивное сопротивление будет описываться формулой XL=2πfL. Поэтому при росте частоты реактивное сопротивление растет пропорционально. Этот рост реактивного сопротивления в свою очередь приводит к падению тока в статоре (при условии, что напряжение остается постоянным при увеличении частоты). Это может стать причиной чрезмерного падения момента на высоких скоростях или его превышения (а вследствие и перегрева статора!) на низких. По этой причине переменное напряжение приложенное ПЧ к двигателю обычно делают прямо пропорциональным частоте, в результате чего ток в статоре будет оставаться в необходимых рабочих пределах во всём диапазоне скоростей ЧРП. Это соотношение называют «V/F» -, «V/Hz» — отношением, или скалярной характеристикой.
По этой причине переменное напряжение приложенное ПЧ к двигателю обычно делают прямо пропорциональным частоте, в результате чего ток в статоре будет оставаться в необходимых рабочих пределах во всём диапазоне скоростей ЧРП. Это соотношение называют «V/F» -, «V/Hz» — отношением, или скалярной характеристикой.
Возьмём в качестве примера ЧРП, запрограммированный на постоянное отношение «V/F». Если на полной скорости (50 Гц) выходное напряжение на двигатель составляет 380 В, тогда выходное напряжение будет равно 190 В на половине скорости (25 Гц), и 95 В на четверти максимальной скорости (12,5 Гц).
ЧРП производятся для управления промышленными двигателями широкого диапазона типоразмеров и мощностей. Некоторые ЧП малы и могут уместиться в вашу руку, другие огромны и для их транспортировки требуются грузовые вагоны. На следующей фотографии показана пара частотников Allen-Bradley среднего размера (около 75 кВт каждый, 1,2 м в высоту), используемых для управления насосами для сточных вод фабрики:
Частотно-регулируемые приводы двигателей переменного тока не требуют обратной связи по скорости, которая необходима приводам для регулирования скорости двигателей постоянного тока. Причина этого очень проста: управляемой переменной в приводах переменного тока является частота питания двигателя, а вращаемые магнитным полем двигатели по своей природе являются частотно-управляемыми машинами.
Причина этого очень проста: управляемой переменной в приводах переменного тока является частота питания двигателя, а вращаемые магнитным полем двигатели по своей природе являются частотно-управляемыми машинами.
Например, четырехполюсный индукционный двигатель, питаемый частотой 60 Гц, имеет номинальную скорость 1728 об/мин (при условии 4% скольжения). Если ЧРП выдает на двигатель переменный ток частотой 30 Гц, то скорость этого двигателя будет приблизительно равна половине номинального значения или 864 об/мин. Двигателю переменного тока действительно не требуется обратная связь от датчика скорости, потому что реальная скорость двигателя всегда будет ограничена выходной частотой привода. Управление частотой – это управление скоростью двигателя для синхронных и индукционных двигателей переменного тока, поэтому обратная связь от тахогенератора не является необходимой для того, чтобы приблизительно* «узнать» как быстро крутится двигатель. Отсутствие необходимости обратной связи по скорости для приводов переменного тока устраняет потенциальную угрозу безопасности, общую для всех приводов постоянного тока: вероятность «выбега» в случае потери приводом сигнала обратной связи от датчика скорости, при котором на двигатель подается полная мощность.
Как и с приводами постоянного тока, цепи ЧРП являются источниками мощного электрического шума. Прямоугольные импульсы, создаваемые быстрыми переключениями силовых полупроводниковых устройств, эквивалентны бесконечным рядам высокочастотных синусоидальных волн (эту эквивалентность, известную как ряды Фурье, математически доказал Жан Батист Жозеф Фурье (1768-1830)), некоторые из которых могут иметь достаточно высокую частоту для самостоятельного распространения в пространстве в виде электромагнитных волн. Эти электромагнитные помехи могут быть довольно интенсивными в случае высокомощных цепей промышленных приводов. По этой причине настоятельно не рекомендуется прокладывать любые силовые моторные кабели или кабели, питающие переменным током схемы приводов, рядом с сигнальными или управляющими проводами, т.к. создаваемый шум будет нарушать работу любых систем, использующих эти низкоуровневые сигналы.
Электромагнитный шум от силовых кабелей переменного тока может быть уменьшен пропусканием переменного тока через цепи низкочастотных фильтров, называемых сетевыми дросселями, расположенных вблизи привода. Эти сетевые дроссели, содержащие катушки индуктивности с ферромагнитными сердечниками, соединенные последовательно с приводом, блокируют высокочастотный шум, не давая ему вернуться назад к источнику переменного тока, где он может оказать влияние на другое электронное оборудование. Меньшее, что может быть сделано с электромагнитным шумом между приводом и двигателем — это экранирование кабелей хорошо заземленным кабелепроводом.
Эти сетевые дроссели, содержащие катушки индуктивности с ферромагнитными сердечниками, соединенные последовательно с приводом, блокируют высокочастотный шум, не давая ему вернуться назад к источнику переменного тока, где он может оказать влияние на другое электронное оборудование. Меньшее, что может быть сделано с электромагнитным шумом между приводом и двигателем — это экранирование кабелей хорошо заземленным кабелепроводом.
0 Комментарии
Синхронный электродвигатель- устройство, работа и применение
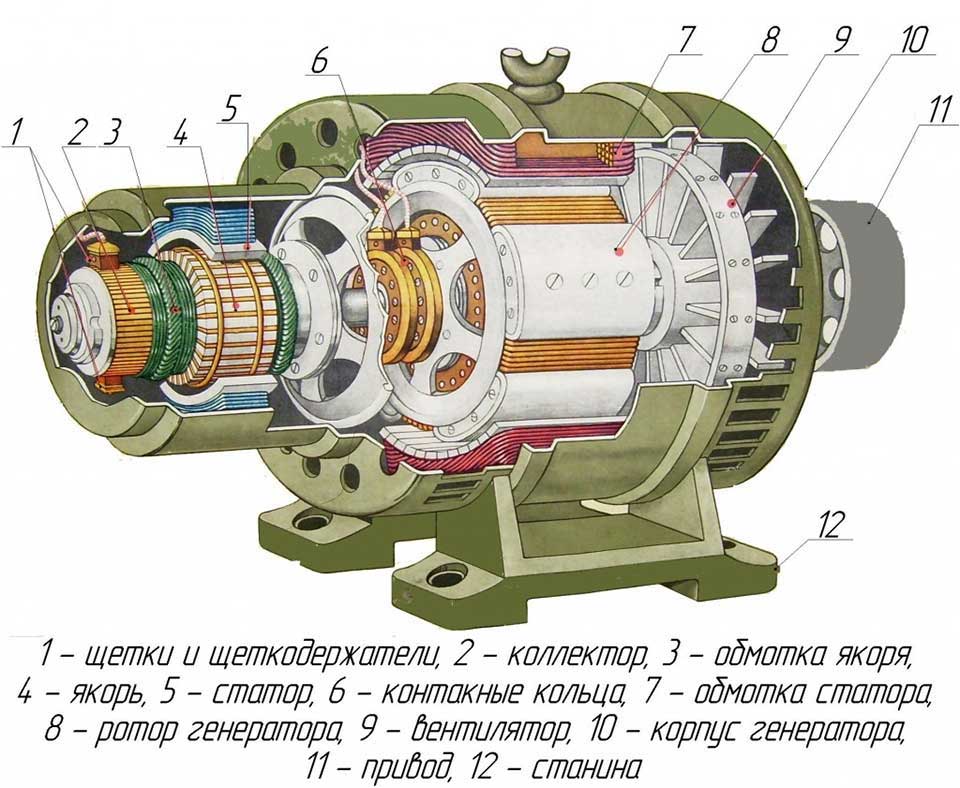
Синхронный двигатель является электрической машиной, работающей в сети переменного тока. Синхронными электрические машины называются потому, что частота вращения вала ротора точно соответствует частоте магнитного поля, индуцируемого статором.
Как любая вращающаяся электрическая машина, синхронный двигатель состоит из ротора, в данном случае являющегося индуктором и статора, именуемого также якорем. На роторе (индукторе) выполнена обмотка возбуждения, которая питается напряжением постоянного тока через коллекторный механизм. На статоре намотана обмотка переменного тока, которая образует магнитное поле. Само же магнитное поле движеся по кругу, то есть. вращается При взаимодействии с полем индуктора создает вращающий электромагнитный момент на роторе.
На статоре намотана обмотка переменного тока, которая образует магнитное поле. Само же магнитное поле движеся по кругу, то есть. вращается При взаимодействии с полем индуктора создает вращающий электромагнитный момент на роторе.
Первоначально запуск двигателя осуществляется в асинхронном режиме, то есть, с короткозамкнутым ротором. В этом режиме машина, являющаяся по сути асинхронной, разгоняется до скорости, приближающейся к синхронной. Затем на обмотку индуктора подается постоянный ток (перед этим обмотка, естественно, размыкается) и осуществляется так называемый «вход в синхронизм».
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков.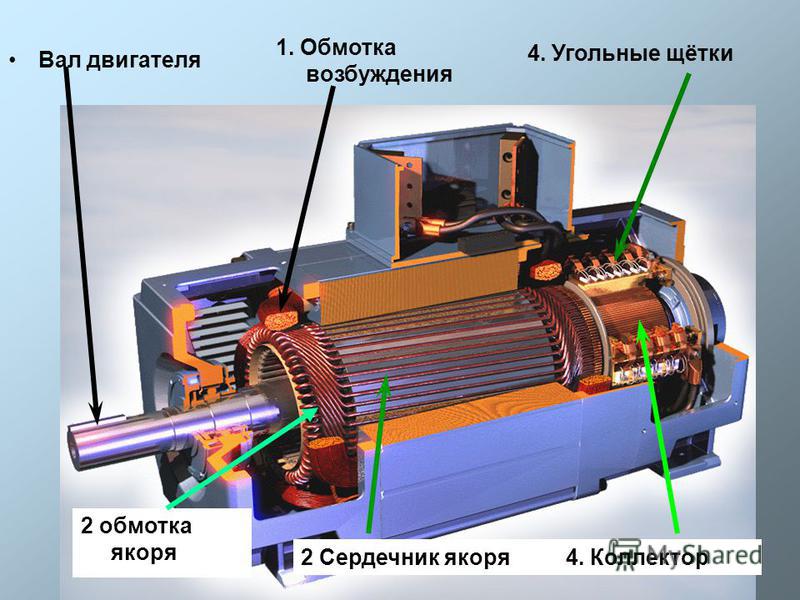 Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.
Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.
Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.
При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.
Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
То есть, генератор реактивной мощности, который способен обеспечивать потребность реактивной мощности узла потребления, к которому он подключен.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.
Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
I.CH—AC Синхронный двигатель — I.CH MOTION CO.,LTD — Каталоги в формате PDF | Техническая документация
Добавить в избранное
{{requestButtons}}
Выдержки из каталога
I.CH СИНХРОННЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА I.CH MOTION CO., LTD MOTION WORLD I.CH Motor поставляет полный спектр синхронных двигателей переменного тока. Структура и характеристика синхронного двигателя переменного тока. Код продукта. Для синхронного двигателя переменного тока. Скорость: 1,6 = 1,6 об/мин. Крутящий момент 12 = 12 кг·см. двигателя СИНХРОННЫЙ ДВИГАТЕЛЬ
Применение Бытовые электроприборы, ламинаторы, машины с автоматическим управлением, прожекторы и т. д.
Бытовые электроприборы, ламинаторы, машины с автоматическим управлением, прожекторы и т. д. Примечание. Приведенные выше данные относятся к двигателям с частотой менее 50 Гц. Если ниже 60 Гц, скорость*1,2, крутящий момент/1,2, необходима другая скорость и крутящий момент, свяжитесь с нашим отделом продаж. Машина, прожектор и т. д.
Если ниже 60 Гц, скорость*1,2, крутящий момент/1,2, необходима другая скорость и крутящий момент, свяжитесь с нашим отделом продаж. Машина, прожектор и т. д.
Все каталоги и технические брошюры I.CH MOTION CO.
h301(20 мм) — 1,8°/шаг, 2/4 фазы
1 стр.
I.CH — Постоянный шаговый двигатель + редуктор
8 страниц
ICH — Линейный привод с постоянным шаговым двигателем-II
7 страниц
Асинхронный мотор-редуктор переменного тока A702
2 страницы
Гибридный шаговый серводвигатель
5 страниц
Гибридный шаговый мотор-редуктор
5 страниц
D202A1
1 страниц
Д252А4
1 страниц
D362
1 стр.

D372B3
1 страниц
D482G2
1 страниц
H571
2 страницы
HP281
1 страниц
h2101,1106
1 страниц
HS561
1 страниц
HS601
1 страниц
HS861
1 страниц
х464
1 страниц
h491
1 страниц
h492
1 страниц
h521
1 страниц
ШАГОВЫЙ ДВИГАТЕЛЬ P153 (15 ММ)
1 Страница
ЛИНЕЙНЫЙ ГИБРИДНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ HL353 (35 мм)
1 страниц
ГИБРИДНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ, высота 497 (39 мм)
1 Страница
ГИБРИДНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ В606 (60 мм)
1 Страниц
ГИБРИДНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ h301-00202A+энкодер
1 страниц
I.
CH — Бесщеточный двигатель постоянного тока9 страниц
I.CH — Шаговый двигатель с постоянными магнитами
10 страниц
I.CH- Двигатель переменного тока Re-syn
5 страниц
ШАГОВЫЙ ДВИГАТЕЛЬ
10 страниц
Гибридный шаговый двигатель, 2/4 фазы
30 страниц
Серводвигатель постоянного тока BLDC
5 страниц
Планетарный редуктор постоянного тока
6 страниц
СИНХРОННЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
5 страниц
Асинхронный мотор-редуктор переменного тока A802 (80 мм)
2 страницы
Асинхронный мотор-редуктор переменного тока A602 (60 мм)
2 страницы
AC Syn-Motor S501 (50 мм)
1 стр.
Драйвер бесщеточного двигателя постоянного тока — C60-460
5 страниц
Бесщеточный серводвигатель постоянного тока D426 (42 мм)
1 стр.
D122F (размер 12 мм) Центральная ось
1 страниц
D163-1B (размер 16 мм)
1 стр.
Драйвер шагового двигателя C435-125 (0~40 В постоянного тока / 0~29 В переменного тока)
3 страницы
Драйвер шагового двигателя C460-125AD (0~80 В постоянного тока / 25~50 В переменного тока)
3 страницы
Постоянный редуктор шагового двигателя 15 мм
1 страницы
ВАЛ P251 (25 мм)
1 Страница
h452 (0,9 градуса) 35 мм-2/4 фазы
1 страниц
S493(49 мм) 1~75 об/мин, 70~0,6 кг.
см1 страниц
БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА D805 (80 мм)
1 страницы
БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА D605 (60 ММ)
1 Стр.
БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА D425 (42 ММ)
1 Стр.
HL203 (1,8 градуса) 20 мм-2/4 фазы
1 страниц
Шестерня шагового двигателя P244
3 страницы
HS421 (1,8 градуса) 42 мм-2 фазы
1 страниц
Гибридный шаговый мотор-редуктор (HP201)
1 стр.
h451 (1,8 градуса) 35 мм-2/4 фазы
1 страниц
h381(1,8°)28 мм-2/4 фазы
1 страниц
Линейный шаговый двигатель L421-0806A2 (42 мм)
1 стр.
Линейный шаговый двигатель L252-012B (25 мм)
1 стр.
Линейный шаговый двигатель L252-012A (25 мм)
2 страницы
Линейный шаговый двигатель L251-128 (25 мм)
1 страниц
Линейный шаговый двигатель L251-040 (25 мм)
1 стр.
Линейный шаговый двигатель L251-110 (25 мм)
1 стр.
Контроллер преобразования CAN-RS232 CI250
3 страницы
Сверхминиатюрный драйвер шагового двигателя CI243
2 страницы
Драйвер шагового двигателя Serier Port CI241
3 страницы
Драйвер шагового двигателя с параллельным портом CI240
6 страниц
Встроенный шаговый двигатель HI110
1 стр.
Встроенный шаговый двигатель HI86
1 страниц
Встроенный шаговый двигатель HI60
1 стр.
Встроенный шаговый двигатель HI42
1 стр.
Встроенный шаговый двигатель серии HI
1 стр.

 CH — Бесщеточный двигатель постоянного тока
CH — Бесщеточный двигатель постоянного тока
 см
см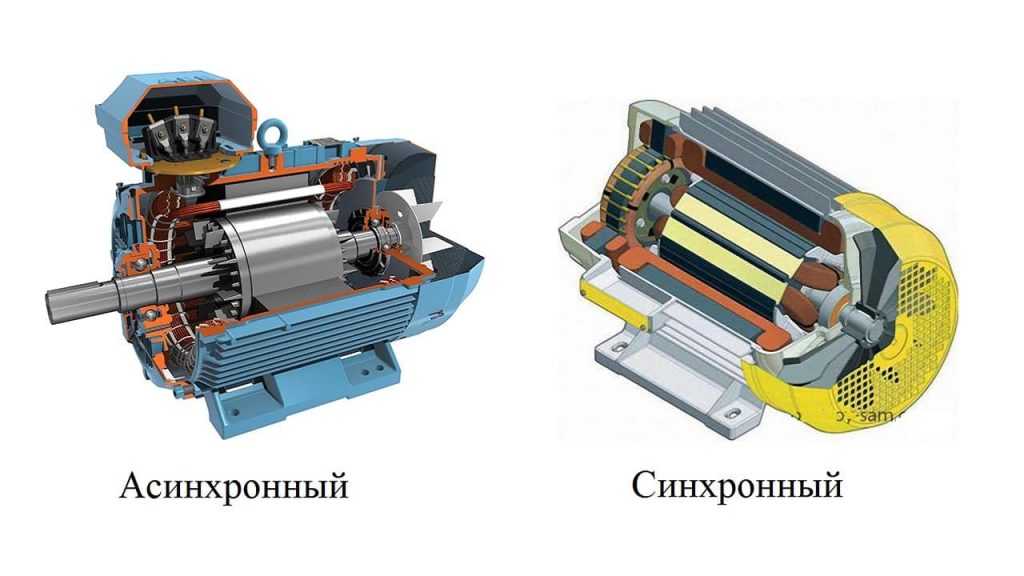

Сравнить
Удалить все
Сравнить до 10 товаров
Разница между BLDC и синхронными двигателями переменного тока
You are here: Home / Motors / DC Motors / В чем разница между BLDC и синхронными двигателями переменного тока?
By Danielle Collins Оставить комментарий
Короткий ответ: бесщеточные двигатели постоянного тока (BLDC) и синхронные двигатели переменного тока аналогичны по конструкции и работе. Некоторые производители и эксперты даже объединяют их как похожие технологии в категорию «синхронных двигателей с постоянными магнитами». Их ключевое отличие, однако, заключается в обмотках катушки статора и результирующей форме волны обратной ЭДС каждого двигателя. Это дает им разные рабочие характеристики и диктует отдельные методы привода для каждого из них.
Это дает им разные рабочие характеристики и диктует отдельные методы привода для каждого из них.
Сходство конструкции
Несмотря на специфику названий, бесщеточные двигатели постоянного тока и синхронные двигатели переменного тока работают на синхронных скоростях. Бесщеточный означает, что они полагаются на электронику (обычно датчики на эффекте Холла), а не на механические щетки, для управления током в обмотках. А синхронный означает, что их магнитные поля ротора и статора вращаются с одинаковой частотой или с синхронной скоростью
И бесщеточные двигатели постоянного тока, и синхронные двигатели переменного тока имеют постоянные магниты (обычно четыре или более), установленные на роторе. Магниты ротора могут быть либо ферритовыми, которые менее дороги, но имеют относительно низкую магнитную индукцию, либо сплавом редкоземельных элементов (таким как неодим), имеющими более высокую магнитную индукцию, но неподъемные по стоимости для некоторых применений. Статор изготовлен из стальных пластин с обмотками (обычно тремя), размещенными в пазах, вырезанных в осевом направлении в пластинах.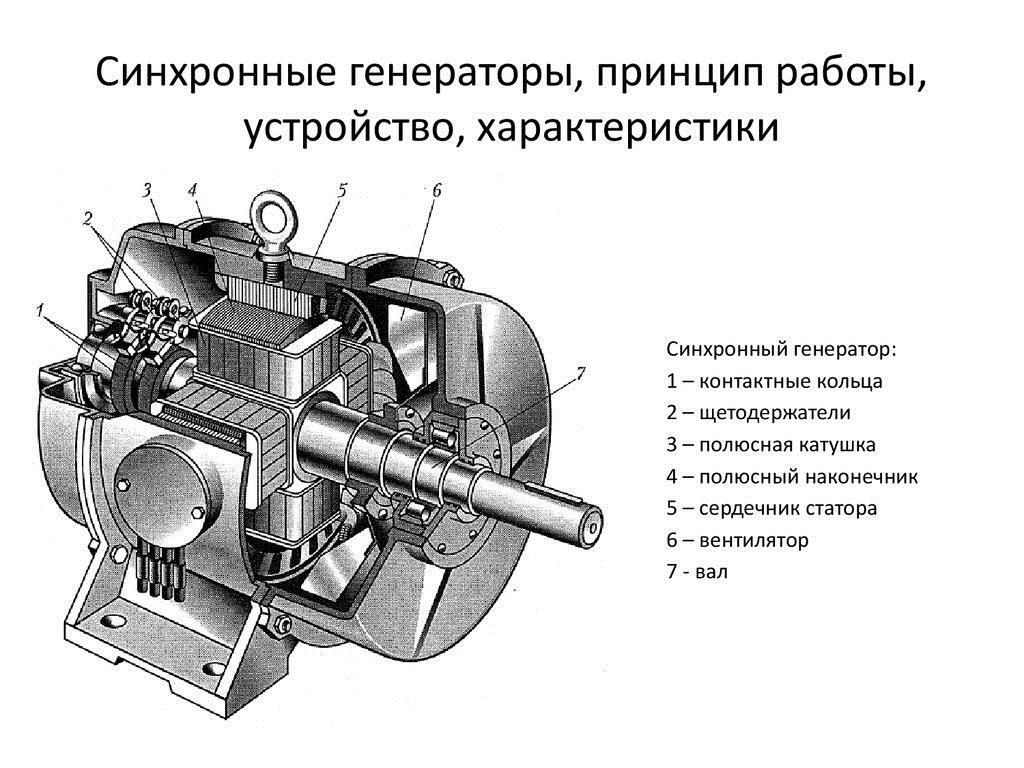
Трехфазный синхронный двигатель с одним ротором на постоянных магнитах.
Изображение предоставлено: Texas Instruments Incorporated
Постоянные магниты ротора создают поток ротора, а ток, подаваемый на обмотки статора, создает электромагнитные полюса. Когда положение ротора таково, что полюс N ротора находится рядом с полюсом N статора, полюса отталкиваются друг от друга и создается крутящий момент.
Различия в работе и характеристиках
Противо-ЭДС (Vc) — это напряжение, создаваемое вращением двигателя. Он противодействует приложенному напряжению (Va) и уменьшает ток, протекающий через катушки.
Изображение предоставлено доктором Дж. Р. Уайтом, profjrwhite.com
В двигателях BLDC катушки статора намотаны трапециевидно, а создаваемая противо-ЭДС имеет трапециевидную форму волны. Из-за их трапециевидной формы волны требуется постоянный ток, чтобы получить наилучшие характеристики от двигателей BLDC. Напротив, синхронные двигатели переменного тока имеют синусоидальную обмотку и создают синусоидальную противоЭДС, поэтому для достижения наилучших характеристик им требуется синусоидальный управляющий ток.
Тип тока привода также влияет на уровень шума, производимого двигателем. Трапециевидный управляющий ток, используемый двигателями BLDC, имеет тенденцию создавать большее количество звуковых и электрических шумов по сравнению с синхронными двигателями переменного тока с синусоидальным управлением.
Синусоидальная (слева) и трапецеидальная (справа) формы сигналов тока для синхронных двигателей переменного тока и бесщеточных двигателей постоянного тока соответственно.
Изображение предоставлено STMicroelectronics
Коммутация, то есть процесс переключения фазных токов двигателя для управления соответствующей катушкой статора, определяется положением ротора. В двигателях BLDC положение ротора обычно контролируется тремя датчиками на эффекте Холла, а коммутация достигается за шесть шагов или каждые 60 электрических градусов. Поскольку коммутация не является непрерывной, пульсации крутящего момента возникают при каждой коммутации фазы (каждые 60 градусов).