Содержание
Выбор двигателя и привода. Подбор типа электродвигателя.
Эта страница создана с целью помочь в выборе двигателя посетителям, имеющим отдаленное представление о
видах и типах
электромоторов, об их применении. Надеемся, что наши рекомендации помогут сориентироваться в типах
представленных на
сайте электродвигателей и выбрать подходящий из предлагаемых.
Выбрать тип электродвигателя можно, ответив на несколько общих вопросов.
Требуется ли точное позиционирование?
- Если да, то следует выбрать шаговый
двигатель или
сервопривод.Требуется ли очень высокая точность?
- Если крайне высокая точность или разрешающая способность необходимы, следует выбрать серводвигатель.

- Если точности 0,09 град. будет достаточно, выбирайте привод на базе шагового двигателя.
Требуется ли плавное движение, особенно на маленьких скоростях?
- Да: стоит рассмотреть возможность использования сервопривода
- Нет: можно выбрать шаговый двигатель.
Критична ли цена устройства?
- Ответ «да, цена очень важна»: в пользу выбора шагового
двигателя. - Если нет: можно пожертвовать ценой в пользу выдающихся достоинств сервопривода.
- Если крайне высокая точность или разрешающая способность необходимы, следует выбрать серводвигатель.
Нет, точное позиционирование не требуется или не очень важно, или есть
возможность
работать с датчиками (концевыми выключателями).

купить шаговый двигатель
купить блок управления шаговым двигателем
Нужно ли регулировать скорость?
- Ответ «да, нужно»: в пользу выбора асинхронного двигателя с
регулируемой скоростью. - Если нет: асинхронный двигатель DKM.
Какое напряжение питания предпочтительно?
И еще несколько рекомендаций и примеров по выбору двигателя:
- Предполагается использовать электродвигатель для простого вращения, например для витрины, рекламных
конструкций,
вентиляторов, для перемешивания — выбор мотор-редуктора с
коллекторным двигателем. - То же самое, но есть требования к надежности и ресурсу:
- Предпочтительно питание от сети 220В — стоит выбрать асинхронный мотор-редуктор.
- Питание от источника постоянного тока — используйте бесколлекторный двигатель.
- Если нужен привод для реализации работы двигателя по заданной программе: переместить в определенную
позицию,
выполнить реверс, приостановить работу на заданное время, продолжить работу с измененной скоростью.
Такие
алгоритмы используются, например, в намоточном оборудовании, в протяжке лент, проволоки, фольги и
подобных
устройствах, в сварочных автоматах, в этикетировщиках, механизмах подачи и распределения — без сомнения,
в этих
случаях предпочтительнее выбрать шаговый двигатель. - Привод нужен для работы станка с ЧПУ или координатного стола — также предпочтительнее использовать
шаговый
привод. - Если Ваше устройство очень ответственно, предъявляет повышенные требования к точности, плавности и
требует
сложных алгоритмов работы — используйте сервопривод.


Асинхронные двигатели с редуктором используются, как правило, в устройствах, не требующих особой точности
перемещеня
(т.е. позиционирования) и удобны, когда требуется простое вращение с постоянной скоростью. Питание двигателя
220В
50Гц, поэтому они не требуют дополнительного источника питания и могут работать от сети 220В. В большинстве
случаев
при использовании асинхронного двигателя не требуются дополнительные дорогие системы управления.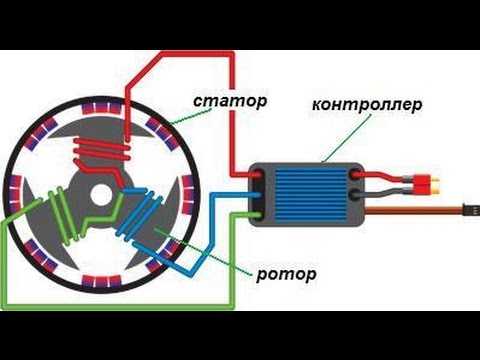
Управление асинхронным двигателем. Вращение вала двигателя начинается сразу при подаче
питания.
Величина скорости определяется передаточным числом редуктора. Чуть более усложненный вариант — регулирование
скорости
с помощью частотного преобразователя, т.е. скорость вращения можно изменять.
Примеры применения асинхронного мотор-редуктора — вентиляторы в помещении, вращающиеся
витрины и
рекламные конструкции, в случае, если удобно подключать их к сети 220В, устройства для перемешивания,
конвейеры.
Из достоинств асинхронных мотор-редукторов можно отметить высокую надежность, длительный
срок службы
и простоту использования. Из недостатков можно отметить высокую стоимость частотных
преобразователей,
которые необходимы для регулирования скорости.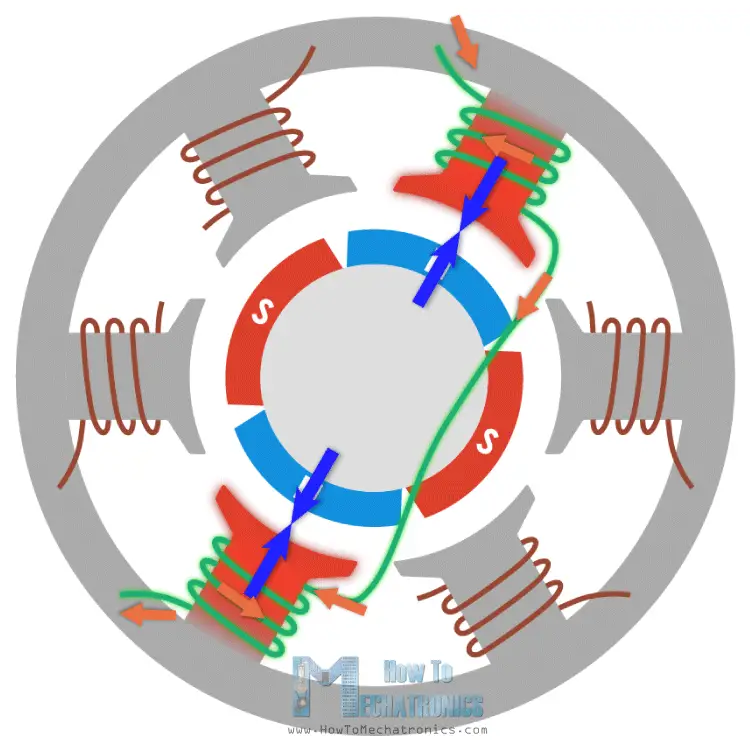 Выбрать асинхронный двигатель
Выбрать асинхронный двигатель
Мотор-редукторы постоянного тока, как и асинхронные, используются в устройствах, не требующих точности, но
предъявляющих требования к цене. Мотор-редукторы постоянного тока чрезвычайно просты в применении и не
требуют
специальных устройств управления. Эти двигатели подключаются к источнику питания 3В, 12В или 24В. Можно
использовать и
меньшее напряжение питания.
Управление коллекторным мотор-редуктором. Вращение двигателя начинается сразу при подаче
питания.
Максимальная скорость определяется скоростью самого электромотора и редуктора. «Подгонка» скорости
осуществляется
изменением напряжения питания (в меньшую сторону). Изменение направления вращения обеспечивается сменой
полярности
питания.
Примеры применения коллекторных двигателей с редуктором — вращение демонстрационных
витрин, привод
шпинделя в станках, перемешивающие устройства, если удобно использовать питание 12В или 24В (иногда 3В).
Основное достоинство коллекторного двигателя с редуктором — его простота и низкая
стоимость.
Недостаток — меньший срок службы: трущиеся и контактирующие детали коллектора (щетки)
двигателя
довольно быстро выходят из строя. Выбрать коллекторный мотор-редуктор
Шаговый двигатель называется шаговым, т.к. может выполнять поворот вала на определенный угол. Шаговые
двигатели
используются в случаях, когда требуется точное перемещение и позиционирование — можно задать величину
углового
перемещения с точностью до десятых (а иногда и сотых долей градуса). Кроме того, шаговые двигатели удобно
применять,
когда требуется реализовать сложный алгоритм движения. Шаговый двигатель обязательно требует блок управления
(драйвер). Питание зависит от используемого драйвера.
Управление шаговым приводом. В самом общем виде управление шаговым двигателем сводится к
задаче
отработать определенное число шагов в нужном направлении и с нужной скоростью. Если говорить о
неподготовленных
пользователях, под управлением обычно понимают не сам шаговый двигатель, а шаговый привод вместе с системой
управления. В этом случае на блок управления ШД подаются сигналы «сделать шаг» и «задать направление».
Сигналы
представляют собой импульсы 5В. Такие импульсы можно получить от компьютера, например от LPT-порта, от
специального
контроллера управления шаговыми приводами или задавать сигналы самостоятельно от источника питания или
генератора 5В.
Управление от компьютера распространено для управления станками с ЧПУ — для такой задачи существует
специальное
программное обеспечение. Управление от контроллера удобно, когда нужно реализовать какой-то определенный
Управление от контроллера удобно, когда нужно реализовать какой-то определенный
алгоритм
движения, например в протяжных механизмах, этикетировщиках, автоматах.
Применение шаговых двигателей. Одно из самых распространенных применений шаговых
двигателей — станки
с ЧПУ и координатные столики — работа шаговых приводов осуществляется от ПК — современное программное
обеспечение
позволяет осуществлять работу шаговых приводов в соответсвии с чертежем. Шаговые двигатели распространены в
роботах,
конвейерах, системах подачи. Выбор шагового двигателя оправдан в этикетировочных машинах, устройствах
протяжки
проволоки или фольги и др. подобных устройствах. Кроме того, шаговые двигатели используются в аналитических
приборах и
эмуляторах стрелочных приборов.
Преимущества шаговых двигателей заключаются в возможности их применения в довольно сложных
и
ответственных устройствах, возможность точно задавать положение вала и угол перемещения. Скорость двигателя
Скорость двигателя
полностью
контролируется от 0 до максимально возможной. Шаговые двигатели имеют большой ресурс и срок службы.
К
недостаткам можно отнести стоимость системы управления, некоторую дискретность перемещения,
высокую (до 80
град) температуру поверхности двигателя, а также значительную потерю момента на высоких скоростях. Выбрать шаговый двигатель
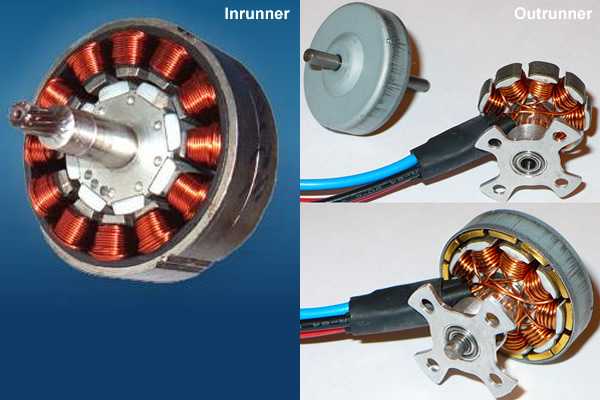
Бесколлекторный двигатель можно сравнить с «вывернутым наизнанку» коллекторным двигателем постоянного тока
—
ротор-магнит вращается внутри статора с обмотками. Если проще — в бесколлекторном двигателе нет трущихся
переключающихся контактов, как в коллекторном двигателе. Двигатель несколько сложнее в управлении, выше его
цена. Но и
надежность и срок службы такого двигателя существенно выше.
Управление бесколлекторным двигателем. Для работы бесколлекторного двигателя обязательно
Для работы бесколлекторного двигателя обязательно
требуется
специальный блок управления. Как и в случае с шаговым двигателем, для бесколлекторного двигателя
подразумевается
управление приводом. Управление скоростью осуществляется аналоговым сигналом от 0В (мин. скорость) до 5В
(максимальная
скорость). Направление вращение — сигналом 0/5В, подаваемым на блок.
Применение бесколлекторных двигателей. Эти двигатели используются при производстве моделей
(часто в
радиоуправляемых авиамоделях), в небольших поворотных устройствах, механизмах позиционирования, рекламных
конструкциях, дозирующих механихмах, в строительстве, при изготовлении смесей (краски, лаки, клей и т.п.).
Двигатели
устанавливаются в выставочных стендах, поворотных рекламных столиках и площадках, вентиляторах для
помещений,
дозаторах жидкости, затворных механизмах, сварочных аппаратах, устройства для смешивания.
Преимущества бесколлекторных двигателей, во-первых, в их ресурсе — они намного долговечнее
и
надежнее аналогичных коллекторных моторов. Во-вторых, к достоинствам можно отнести их высокий КПД.
В-третьих, по
сравнению с шаговыми двигателями, бесколлекторные работают несколько тише. Также нужно отметить более
высокую скорость
бесколлекторного двигателя примерно в 10 раз выше, чем у шагового. Из недостатков —
необходимость
использовать специальный блок управления. Выбрать бесколлекторный двигатель
Сервопривод — это, как правило, интеллектуальное устройство, включающее сервомотор и блок управления.
Серводвигатели
отличаются очень высокой надежностью. При работе в паре с блоком управления, сервопривод может
использоваться для
решения очень сложных и ответственных задач. Точность сервопривода зависит от установленного в нем датчика
Точность сервопривода зависит от установленного в нем датчика
обратной
связи и выбирается в соответствии с решаемой задачей. Сервопривод позволяет осуществлять очень плавное
движение даже
на низких, близких к 0, скоростях.
Управление серводвигателем осуществляется при помощи специального блока, который получает
сигналы от
датчика обратной связи, встроенного в сервомотор. Блок управления обычно имеет множество опций для работы от
ПК,
встроенные интерфейсы позволяют использовать его в промышленности. Многочисленные настройки и нюансы работы
обычно
загружаются в привод через ПК. Далее возможна автономная работа и управление без компьютера.
Сервоприводы применяются там, где требуется надежность и безотказность, например в сложных
медицинских аппаратах и оборонной промышленности. Сервомоторы могут использоваться в устройствах,
Сервомоторы могут использоваться в устройствах,
обслуживание которых
может быть затруднено. Выбор серводвигателя обоснован в случае, когда необходима долговечность. Точность
позиционирования и плавность перемещения делают возможным применение привода в высокоточных приборах,
станках и прочих
механизмах.
Преимуществ при выборе сервомотора масса: плавность и точность перемещений доступны даже
на низких
скоростях, разрешающая способность может выбираться пользователем в зависимости от решаемой задачи.
Надежность и
безотказность, а следовательно, возможность использовать его в ответственных, не терпящих отказа
устройствах.
Бесшумность и плавность работы делают сервоприводы иногда единственным возможным вариантом при выборе
двигателя.
Достоинства сервопривода таковы, что применять их можно было бы всегда, когда только возможно, если бы не
два
недостатка: цена комплекта (сервомотор + блок управления) и сложность настройки, которая иногда
делает
применение сервопривода необоснованным. Выбрать
Выбрать
серводвигатель
Каргу А.П.
Коллекторный электродвигатель или бесколлекторный
Коллекторные и бесколлекторные двигатели постоянного тока ДПТ не теряют своей актуальности, широко применяясь в качестве электроприводов подъемных и транспортных средств, поскольку обладают наиболее подходящими для этого пусковыми и регулировочными характеристиками. В этой статье мы рассмотрим особенности конструкции и применения разных видов ДПТ. Конструкция двигателей постоянного тока со времени выпуска первых промышленных моделей 2 половина 19 века не претерпела существенных изменений. Принцип действия базируется на свойстве разноименных полюсов магнита отталкиваться, а одноименных — притягиваться. В число основных элементов, из которых состоит ДПТ, входят:.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Коллекторный электродвигатель
- В чем разница между коллекторными и бесколлекторными электродвигателями постоянного тока?
- Коллекторный и бесколлекторный двигатели
- Сравнение коллекторных и бесколлекторных моторов
- что такое Flux
- Радиоуправляемые модели и игрушки оптом
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Коллекторный и бесколлекторный электродвигатели_ДжоК #2
Коллекторный электродвигатель
Чем отличаются коллекторные двигатели от бесколлекторных, главные преимущества и недостатки обоих типов. Станки и мехатроника. Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки. Мини-станки токарные 2. Поворотные оси. Оси на волновом редукторе 9. Оси на ременном редукторе 5. Задние бабки 3.
Станки и мехатроника. Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4. Токарные станки. Мини-станки токарные 2. Поворотные оси. Оси на волновом редукторе 9. Оси на ременном редукторе 5. Задние бабки 3.
Линейные модули. Линейные модули оси Z 2. Линейные модули с ШВП тяжелые Модули перемещения URS 3. Модули перемещения LRS 7. Модули перемещения VRS вертикальные 2. Линейные модули с ременным приводом 1. Контроллеры и системы ЧПУ. Контроллеры Mach5 3. Автономные контроллеры 5. Контроллеры Mach4 9. Контроллеры NC Studio 5.
Контроллеры ЧПУ 3 оси. Контроллеры ЧПУ 4 оси. Системы ЧПУ фрезерные 1. Системы ЧПУ плазменная резка 1. Управление станком с ЧПУ. Платы опторазвязки 6. Интерфейсные платы 5 осей 1. Платы опторазвязки LPT 5. ПЛК 2. Платы коммутации Коммутация, переходники Конвертеры сигналов Наборы Наборы управления на сервоприводах 3.
Наборы управления на ШД 4. Пульты для станков 9. Генераторы импульсов ручные MPG 3. Пульты для Mach4 3. Пульты для NCStudio 3. Питание и кабели. Источники питания Импульсные блоки питания Трансформаторные блоки питания 5.
Пульты для Mach4 3. Пульты для NCStudio 3. Питание и кабели. Источники питания Импульсные блоки питания Трансформаторные блоки питания 5.
Аксессуары к БП 7. Трансформаторы и выпрямители 6. Кабели и проводка Провода силовые Провода сигнальные и слаботочные 8. Шлейфы, оконцованные кабели Фильтры помех 3. Разъемы и клеммники Клеммники 6. Разъемы кабель-кабель Разъемы кабель-корпус Монтажные материалы Щиты монтажные 7. DIN-рейка 4. Кнопки, педали 4. Реле, контакторы, фильтры 9. Блоки реле 3. Твердотельные реле 3. ЭМИ фильтры 3. Датчики, энкодеры, линейки. Бесконтактные датчики Индуктивные датчики Датчики высоты, щупы 7.
Концевые выключатели 1. Линейки и УЦИ Rational Линейки оптические Устройства индикации DRO 2. Энкодеры 5. Пластины и уголки для датчиков 3. Двигатели и привод. Шпиндели для ЧПУ. Шпиндели водяные Водяные шпиндели GDZ 8. Шпиндели GDL 2. Водяные шпиндели GDK 5. Шпиндели DX водяного охлаждения по металлу 5. Водяные шпиндели TDK 6. Водяные шпиндели GMT 4. Шпиндельные двигатели Шпиндельные серводвигатели CTB 5.
Шпиндельные двигатели Шпиндельные серводвигатели CTB 5.
Драйверы шпиндельных двигателей Yuhai 2. Шпиндельные серводвигатели Yuhai 3. Шпиндели воздушные Шпиндели воздушные TDK круглые 2. Шпиндели воздушного охлаждения GMT 7. Шпиндели воздушного охлаждения Hanqi 3. Шпиндели ременные 5.
Шпиндели с автосменой ATC, ременные 4. Минишпиндели Windward 5. Фрезерные шпиндельные головки 2. Шпиндели Kress 7. Коллекторные мини-шпиндели 2.
В чем разница между коллекторными и бесколлекторными электродвигателями постоянного тока?
Задача электрического двигателя создать вращение, что приводит в движение радиоуправляемые модели. Часто одни и те же радиоуправляемые модели — автомодели, авиамодели, судомодели — сильно отличаются друг от друга по цене — почти в 2 раза. Эти модели могут быть укомплектованы коллекторными и бесколлекторными двигателями и соответственными регуляторами. Нужно понять, какой двигатель выбрать. Существует 2 основных типа электродвигателей, использующихся в радиоуправляемых моделях: коллекторные и бесколлекторные. Коллекторные двигатели brushed, щеточные дешеле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны. Определяющей особенностей коллекторных двигателей является наличие щеточно-коллекторного узла, который обеспечивает движение радиоуправляемой модели.
Коллекторные двигатели brushed, щеточные дешеле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны. Определяющей особенностей коллекторных двигателей является наличие щеточно-коллекторного узла, который обеспечивает движение радиоуправляемой модели.
Чем отличается бесщеточный (бесколлекторный) электродвигатель от щеточного (коллекторного).
Коллекторный и бесколлекторный двигатели
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Логическим завершением публикаций будет схема регулятора. Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов. Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе.
Но, в силу неготовности технологий, ждала своего времени до года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе.
Сравнение коллекторных и бесколлекторных моторов
Электродвигатели сегодня широко распространены во многих отраслях, в частности в промышленности и робототехнике. Кроме того, существует большой спрос на малые, эффективные электромоторы с высоким и низким крутящим моментом, а также на электродвигатели различных мощностей для автомобильного сектора. Инженеры, работающие в этих областях, могут выбирать между коллекторными щеточными и бесколлекторными бесщеточными электродвигателями. Все они работают в соответствии с законом индукции Фарадея, тем не менее, между этими моторами есть ключевые различия, которые могут быть неочевидны для новичков в электроприводе.
Наверняка у каждого новичка, который впервые связал свою жизнь с электромоделями на радиоуправлении, после тщательного изучения начинки, появляется вопрос.
что такое Flux
Подписавшись, Вы будете оперативно получать новости Электротехнической отрасли, кабельных заводов, наличие на складе, спецпредложения. Трудно себе представить современное производство без различного оборудования и без электродвигателей, которые приводят его в действие. Исправная работа электродвигателя — гарантия качественного производственного процесса в любой промышленной отрасли. Электродвигатели постоянного тока создают регулируемые электроприводы. Устройство электродвигателя постоянного тока таково, что он может работать только от постоянного тока.
Радиоуправляемые модели и игрушки оптом
Если вы уже решили, какую именно радиоуправляемую модель хотите купить и точно знаете, что ваш будущий внедорожник, самолет, дрон или быстроходный катер будет оснащен электродвигателем, самое время задуматься, какого типа мотор лучше и надежнее. Современная RC-модель на электрической тяге может иметь коллекторный или бесколлекторный двигатель. Каждый вариант имеет свои достоинства и недостатки. И разница тут не только в цене, как могут сказать в ближайшем магазине. Итак, рассмотрим все детально, а выводы относительно того, с каким же моторчиком выбрать машинку или другую модель на радиоуправлении, пусть каждый делает самостоятельно. Ротор подвижная часть и статор неподвижная часть — это два основных элемента мотора коллекторного типа. Внутри корпуса статора вращается подвижный ротор с медной обмоткой. С одной стороны вала ротора установлена передающая шестерня, или шкив, а с другой — коллектор, который, по сути, является набором контактов.
Современная RC-модель на электрической тяге может иметь коллекторный или бесколлекторный двигатель. Каждый вариант имеет свои достоинства и недостатки. И разница тут не только в цене, как могут сказать в ближайшем магазине. Итак, рассмотрим все детально, а выводы относительно того, с каким же моторчиком выбрать машинку или другую модель на радиоуправлении, пусть каждый делает самостоятельно. Ротор подвижная часть и статор неподвижная часть — это два основных элемента мотора коллекторного типа. Внутри корпуса статора вращается подвижный ротор с медной обмоткой. С одной стороны вала ротора установлена передающая шестерня, или шкив, а с другой — коллектор, который, по сути, является набором контактов.
Решено: Сравнение коллекторных и бесколлекторных моторов Электродвигатели Ответ.
Чтобы ваш четырехколесный друг на радиоуправлении долго служил вам верой и правдой, ему необходимы комплектующие и детали отменного качества. В каталоге вы найдете товары только от ведущих производителей. Выбирайте деталь требуемого типа, конструкции и назначения, заказывайте ее с доставкой на дом и наслаждайтесь гонками! Для вас создана удобная система фильтров.
Выбирайте деталь требуемого типа, конструкции и назначения, заказывайте ее с доставкой на дом и наслаждайтесь гонками! Для вас создана удобная система фильтров.
Flux Brushless System состоит из электронного регулятора скорости и бесколлекторного двигателя. С таким мотором ваша модель станет сверхбыстрой на трассе и сможет развивать бешенную скорость! Особенности бесколлекторных двигателей Flux :. Регулятор скорости серии Flux имеет разъемы для подключения мотора, разъем типа Dean для подключения и трехжильный кабель с разъемом для соединения с приемником, так что вы сможете легко установить регулятор в любом удобном месте на вашей модели.
Самые маленькие двигатели данного типа единицы Ватт содержат в корпусе:. Применяются, в основном, в детских игрушках, плейерах, фенах, электробритвах, аккумуляторных отвёртках и т.
Бесколлекторный электродвигатель. В ряде отраслей промышленности и на транспорте могут существовать условия, когда коллекторные электродвигатели постоянного тока обычного исполнения неприменимы. К таким условиям в первую очередь следует отнести взрывоопасные газовые среды; различные агрессивные среды, быстро разрушающие коллектор; пониженное или повышенное давление; относительно низкую или высокую влажность. Сюда же можно отнести условия, в которых работают космические летательные аппараты, характеризующиеся наличием глубокого вакуума и отсутствием доступа к двигателю во время его эксплуатации. Кроме этого, из-за недостаточной механической прочности коллектора эти электродвигатели не находят широкого применения при создании высокооборотных электроприводов. Радикальным способом расширения областей применения электродвигателей постоянного тока является создание машины постоянного тока с бесконтактными коммутаторами, в которых хорошие пусковые качества, энергетические и регулировочные характеристики коллекторных машин с постоянными магнитами сочетались бы с высокой надежностью бесколлекторных машин переменного тока.
К таким условиям в первую очередь следует отнести взрывоопасные газовые среды; различные агрессивные среды, быстро разрушающие коллектор; пониженное или повышенное давление; относительно низкую или высокую влажность. Сюда же можно отнести условия, в которых работают космические летательные аппараты, характеризующиеся наличием глубокого вакуума и отсутствием доступа к двигателю во время его эксплуатации. Кроме этого, из-за недостаточной механической прочности коллектора эти электродвигатели не находят широкого применения при создании высокооборотных электроприводов. Радикальным способом расширения областей применения электродвигателей постоянного тока является создание машины постоянного тока с бесконтактными коммутаторами, в которых хорошие пусковые качества, энергетические и регулировочные характеристики коллекторных машин с постоянными магнитами сочетались бы с высокой надежностью бесколлекторных машин переменного тока.
Вентильные двигатели в англоязычной литературе BLDC или PMSM ещё называют бесколлекторными двигателями постоянного тока , потому что коллектор такого двигателя обычно питается от постоянного напряжения.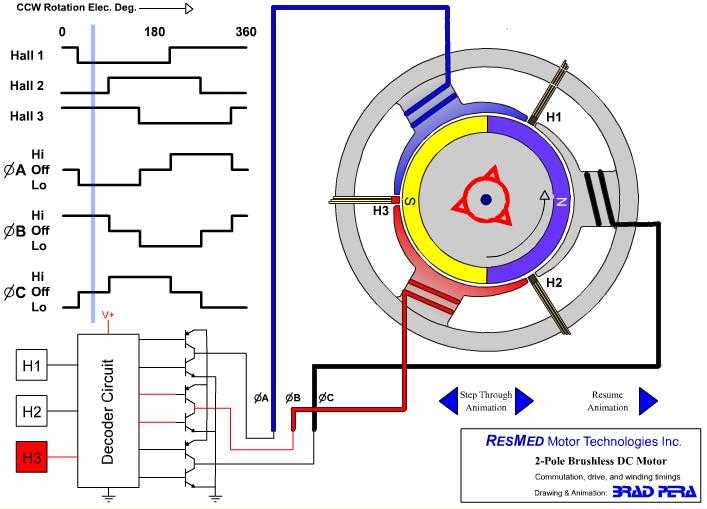 Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам в частности, высокооборотных микроприводов точного позиционирования обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока БДПТ или BLDC. Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками.
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам в частности, высокооборотных микроприводов точного позиционирования обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока БДПТ или BLDC. Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками.
Разница между щеточными и бесщеточными двигателями
– Progressive Automations
Ежедневно машины и орудия в нашем окружении часто используют щеточные и бесщеточные двигатели постоянного тока для обеспечения вращательного движения. Оба мотора внешне могут выглядеть одинаково, однако их конструкция и работа сильно различаются. Чтобы получить наилучшие результаты, важно выбрать правильный двигатель и обеспечить правильную конфигурацию для вашего приложения. В этой статье мы рассмотрим разницу между щеточными и бесщеточными двигателями, чтобы лучше понять, какой двигатель наиболее подходит для их применения. Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Просмотрите все наши электрические линейные приводы, от микро до промышленных!
Коллекторный двигатель постоянного тока
Коллекторный двигатель постоянного тока состоит из нескольких основных компонентов, которые в сочетании с источником питания постоянного тока создают вращающийся двигатель. Конфигурацию якоря, коммутатора, щеток и магнита возбуждения можно увидеть на рисунке 1 ниже.
Рис. 1. Чертеж (слева) и фактический пример (справа) коллекторных двигателей постоянного тока
На нашем чертеже показан упрощенный якорь, чтобы было легче увидеть протекающий через него ток; однако щеточные двигатели постоянного тока будут иметь несколько обмоток катушки с якорем. Щетки заряжают коммутатор, который пропускает ток через якорь в противоположной полярности постоянного магнита. Это заставляет якорь вращаться от притяжения магнитов.
Коллекторные двигатели постоянного тока просты в эксплуатации, поскольку являются одними из самых простых типов двигателей, однако их срок службы короче, чем у бесщеточных двигателей. Из-за того, что щетки имеют физический контакт с коллектором, искрение является распространенной проблемой для щеточных двигателей. Этот физический контакт также со временем изнашивает щетки и приводит к некоторой потере энергии из-за возникающего трения.
Выберите правильную систему управления для вашего привода из нашего большого ассортимента!
Контроллер бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока (BLDC) устраняет основные недостатки его щеточного аналога. Двигатель состоит из постоянных магнитов и катушек, которые через серию идеально синхронизированных интервалов подачи питания заставляют постоянный магнит в центре вращаться вокруг катушек, окружающих его. Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Рисунок 2: Чертеж (слева) и фактический пример (справа) бесколлекторных двигателей постоянного тока
На катушки бесщеточного двигателя подается питание в определенной последовательности (рис. 3), что приводит к вращению постоянных магнитов на роторе. Это делается без какого-либо физического контакта и позволяет использовать более эффективный и долговечный двигатель постоянного тока.
Рис. 3. Последовательность подачи питания на катушки
Для того чтобы обеспечить выходной сигнал, показанный на Рис. 3, бесщеточному двигателю постоянного тока требуется блок электронного контроллера (ЭБУ), определяющий положение ротора и катушки, на которые подается питание.
В отличие от коллекторных двигателей постоянного тока, для вращения которых требуется напряжение 12 В постоянного тока, приложенное непосредственно к двигателю, для бесщеточных двигателей постоянного тока требуется трехфазное питание. Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Подключение бесщеточных двигателей к кулисным переключателям
Progressive Automations в настоящее время предлагает мини-линейный привод PA-14 в варианте бесщеточного постоянного тока для индивидуальных заказов. Схема подключения бесщеточных приводов PA-14 показана на рисунке 4 ниже.
Рис. 4. Схема подключения бесщеточного привода PA-14
Шаг 1
Подсоедините 3 провода контроллера двигателя от бесщеточного привода PA-14 к контроллеру бесщеточного двигателя постоянного тока LC-241. Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Шаг 2
Подключите контакт SPD к заземлению источника питания 12 В постоянного тока, чтобы включить встроенный потенциометр для управления скоростью. Убедитесь, что этот потенциометр повернут по часовой стрелке на полную скорость.
Шаг 3
Подключите контакт GND к контактам Common на кулисном переключателе.
Шаг 4
Подсоедините контакт RUN к обеим сторонам тумблера. Это важно, так как и вперед, и назад для работы требуется контакт RUN, контактирующий с землей.
Шаг 5
Подсоедините контакт REV к одной стороне тумблера. Эта сторона будет обратной стороной тумблера.
Шаг 6
Подайте 12 В постоянного тока на контроллер бесщеточного двигателя постоянного тока, при первом включении питания слышен шум индикатора.
Рис. 5. Физическая проводка бесщеточного привода PA-14
Базовая настройка завершена; с помощью кулисного переключателя привод можно выдвигать и втягивать. Проблема с приводом бесщеточного двигателя постоянного тока заключается в том, что внутренние концевые выключатели не могут остановить подачу питания к приводу, как это происходит с щеточными двигателями постоянного тока. Это связано с тем, что на бесколлекторный двигатель PA-14 подается трехфазное питание. Бесколлекторный электропривод PA-14 оснащен встроенным концевым выключателем с обратной связью, который можно использовать с ПЛК или микроконтроллером для индикации того, что привод находится в конце хода. Обратная связь действует как переключатель с нормально замкнутого на нормально открытый, что необходимо для интеграции бесщеточного привода PA-14 в реальные приложения.
У нас также есть статья о непрерывном удлинении и втягивании хода привода с бесщеточным двигателем постоянного тока для справки с примерами кодирования.
Подключение щеточных двигателей к кулисным переключателям
Большинство наших электрических линейных приводов поставляются с щеточными двигателями постоянного тока. Простота эксплуатации коллекторных двигателей постоянного тока позволяет подключать кулисные переключатели между источником питания постоянного тока и коллекторным двигателем без необходимости в дополнительном контроллере.
Рисунок 6: Схема подключения кулисного переключателя к приводу с коллекторным двигателем подключен к земле блока питания. Этот тип проводки выключателя привода позволяет оператору изменять направление потока электрического тока, поступающего в привод, для изменения направления движения. В качестве физического примера схемы подключения исполнительного механизма с кулисным переключателем это видео является отличным примером. Рис. 7. Физическая проводка кулисного переключателя к приводу с коллекторным двигателем Хотите внедрить автоматизацию в свой дом? Взгляните на наши продукты для домашней автоматизации! Коллекторные двигатели постоянного тока имеют катушки в центре, вращающиеся вокруг постоянных магнитов, в то время как бесщеточные двигатели постоянного тока имеют в центре постоянный магнит, который вращается вокруг катушек. Конструкция бесщеточного двигателя лучше подходит для приложений, которые будут использовать его более длительный срок службы и большую энергоэффективность. Для более простой и легкой работы в приложениях с коротким временем цикла можно воспользоваться удобной конструкцией коллекторных двигателей постоянного тока. Если у вас есть какие-либо вопросы или вы хотите обсудить наши продукты, пожалуйста, не стесняйтесь обращаться к нам! Мы являемся экспертами в том, что мы делаем, и хотим, чтобы вы нашли лучшее решение для вашего приложения. [email protected] | 1-800-676-6123 Компания Parvalux производит электродвигатели уже более 70 лет, и в этом коротком блоге рассказывается о существенных различиях между щеточными и бесщеточными электродвигателями постоянного тока. Коллекторный двигатель постоянного тока имеет постоянные магниты внутри внешнего корпуса с вращающимся якорем внутри. Постоянные магниты неподвижны и называются «статор». Вращающийся якорь содержит электромагнит и называется ротором. В щеточном двигателе постоянного тока ротор вращается на 180 градусов, когда на якорь подается электрический ток. Чтобы пройти дальше начальных 180 градусов, полюса электромагнита должны поменяться местами. Угольные щетки контактируют со статором, когда ротор вращается, меняя магнитное поле и позволяя ротору вращаться на 360 градусов. Подобно щеточному двигателю, бесщеточный двигатель работает за счет чередования полярности обмоток внутри двигателя. По сути, это щеточный двигатель наизнанку, что устраняет необходимость в щетках. В бесщеточном двигателе постоянного тока постоянные магниты установлены на роторе, а электромагниты на статоре. Электронный регулятор скорости (ESC) регулирует или «коммутирует» заряд электромагнитов в статоре, чтобы ротор мог вращаться на 360 градусов. Для получения дополнительной информации о том, какой двигатель постоянного тока, щеточный или бесщеточный, лучше всего подходит для вашего применения, свяжитесь с нашей командой.
Резюме

В чем разница между щеточными и бесщеточными двигателями постоянного тока?
Что такое коллекторный электродвигатель постоянного тока?
Преимущества
Недостатки
Что такое бесщеточный двигатель постоянного тока?
Преимущества

Недостатки
