Содержание
Steampunk Revolution. Или история эволюции парового двигателя. / Блог им. CUbo / Коллективные блоги / Steampunker.ru
Кто же первый покорил энергию пара?
Многие думают что история пара началась в Британской империи в викторианскую эпоху. То есть в период с 1837 по 1901 год — время правления королевы Виктории, эра спокойствия, процветания, упрочения власти в колониях.
К концу 19 века Британия была мощнейшим государством в мире. Ее население составляло свыше 500 миллионов человек (примерно четверть всего человечества), площадь территорий — свыше 37 миллионов квадратных километров (около трети всей суши Земли).
Небывалое развитие науки, стремительная индустриализация, проведение первой Всемирной Торговой выставки (1851), массовая прокладка железных дорог, открытие лондонского метро (1863), электрическое уличное освещение (1882)… Людей буквально опьяняла вера в бесконечную силу рационального мышления. Иначе говоря, начиналась эпоха стимпанка — начиналась, но так и не началась.
Королева Виктория — «бабушка» стимпанка.
Британская империя в 1897 году (выделено красным).
Строго говоря, энергия пара была покорена не британцами, а греками. Еще в 1 веке нашей эры Герон Александрийский создал эолипил — вращающийся под давлением пара металлический шар. Герон построил его как игрушку, не собираясь применять на практике.
Эолипил «шар Эола» — бога ветра.
Совпадение это или нет, но за 700 лет до этого в той же Греции (на острове Коринф) был построен так называемый «диолкос» — вырубленные в известняке параллельные колеи для транспортировки судов по суше(прообраз современной железной дороги).
Данные изобретения никак не были связаны друг с другом, однако вполне можно утверждать, что греки имели теоретическую возможность разработать паровой железнодорожный транспорт почти на 2000 лет раньше, чем подобное произошло. Именно это обстоятельство делает правомерным существование «архаичных» разновидностей стимпанка.
Кто создал паровой двигатель, решить сложно. В разное время над ним (с переменным успехом) работали Томас Сэйвери (1698), Томас Ньюкомен (1712) и Джеймс Ватт. Последний и вошел в историю как «изобретатель» паровой машины. Он запатентовал ее в 1769 году, однако на самом деле он просто усовершенствовал устройства, созданные до него. Отдельно следует упомянуть русского крепостного механика Ивана Ползунова — он создал паровую машину в 1764 году, причем, в отличие от Ватта, делал ее с нуля, не имея перед глазами действующих образцов.
Если определять стимпанк как период активного применения паровых машин, то его началом будет 1707 год, когда французский физик Дени Папин сконструировал первую лодку с паровым двигателем. О ней известно очень мало — речные паромщики быстро почуяли конкуренцию и сломали аппарат.
Крупномасштабное коммерческое использование паровых машин началось в 1807 году с рейсов пассажирского парохода «Клермонт», построенного американцем Робертом Флтоном. Предприятие оказалось неожиданно прибыльным, а пароходы — живучими. Уже через десять-пятнадцать лет они серьезно потеснили парусные суда.
Предприятие оказалось неожиданно прибыльным, а пароходы — живучими. Уже через десять-пятнадцать лет они серьезно потеснили парусные суда.
Пароход «Клермонт». Первая «ласточка» парового флота.
Что касается «сухопутных» паровых машин, то пальму первенства здесь следует отдать Николя Жозефу Куньо (1725—1804). Именно он в 1769 году догадался поставить паровой котел на тележку, чтобы возить тяжелые пушки. Его «fardier a vapeur» (паровая телега) могла перевозить груз весом в четыре тонны и развивала скорость до 4 километров в час.
В 1771 году «паровая телега» Куньо случайно врезалась в стену. Это был первое в мире ДТП с участием «автомобиля».
Паровой тягач Куньо.
Английский изобретатель Ричард Тревитик (1771—1833) продолжил дело Куньо и в 1801 году представил на суд публике «Пыхтящего Дьявола» — первый компактный паровой автомобиль, предназначенный для перевозки людей, а два года спустя — более удачный «Лондонский паровой экипаж».
Паровой автомобиль Тревитика.
В 1804 году Тревитик создает первый в мире паровоз, который работал всего несколько лет. Он быстро приводил рельсы в негодность, так как был слишком тяжел для путей, рассчитанных на небольшие вагоны с «лошадиным приводом».
Первый в мире паровоз
Паровозы и пароходы не только «приблизили» друг к другу города и континенты. Их мощь в то время казалась невероятной. Всего за сотню лет наука сделала такой скачок вперед, что люди, в молодости ездившие на лошадях и даже не мечтавшие увидеть другие страны, теперь могли повторить путешествие Магеллана всего за несколько месяцев. Казалось, будто для человечества больше не осталось преград.
Абсолютный рекорд скорости для паровозов был поставлен локомотивом «Дикая утка» серии LNER Class A4. Своими обтекаемыми формами он больше напоминал современные японские супер-поезда. 3 июля 1938 года он развил 201 километров в час.
Локомотив «Дикая утка»
Но паровой двигатель царил на планете лишь чуть более 150 лет. К концу Второй мировой войны он безвозвратно уступил лидерство двигателям внутреннего сгорания. Стимпанк не состоялся, причем это было неизбежно. Почему? Причины здесь чисто практические.
К концу Второй мировой войны он безвозвратно уступил лидерство двигателям внутреннего сгорания. Стимпанк не состоялся, причем это было неизбежно. Почему? Причины здесь чисто практические.
Да, у паровых двигателей есть свои преимущества. Они неразборчивы к источнику тепла и могут вырабатывать механическую энергию практически на любом топливе. Еще одно преимущество паровых двигателей — нечувствительность к перепадам давления. Это обнаружилось лишь тогда, когда паровозы на высокогорных рейсах сменились тепловозами. При подъеме на значительную высоту последние резко теряли мощность. Сегодня в горах Швейцарии и Австрии до сих пор ходят паровозы.
Однако у паровых двигателей есть один — самый главный — недостаток, перечеркивающий все достоинства. Их КПД (коэффициент полезного действия) равен всего 5%, в то время как двигатели внутреннего сгорания работают при 25% эффективности. Именно поэтому в начале 20 века паровые двигатели проиграли соревнование с дизельными — они не экономно расходовали тепло, были слишком тяжелы (непригодны для установки на летательных аппаратах) и не могли обеспечить высокую мощность при значительном уменьшении размеров.
Теория эволюции • Джеймс Трефил, энциклопедия «Двести законов мироздания»
Жизнь на Земле возникла благодаря физическим и химическим реакциям и развивалась в процессе естественного отбора.
Прежде чем приступить к обсуждению эволюции, едва ли не самого важного понятия в науках о жизни, мне хотелось бы напомнить вам одну мысль, высказанную во Введении. Слово «теория» в научном понимании не обязательно подразумевает отсутствие уверенности в рассматриваемых представлениях. Вопреки обычаям и исторически сложившемуся значению этого слова, многие теории (включая теорию относительности) на самом деле относятся к наиболее широко признанным составляющим научного мировоззрения.
В настоящее время реальность эволюции уже не подвергает сомнению никто из серьезных ученых, хотя существует несколько конкурирующих теорий, каждая из которых предлагает свой вариант развития событий. В этом отношении эволюция аналогична гравитации. Существует несколько теорий гравитации — закон всемирного тяготения Ньютона, общая теория относительности и, в один прекрасный день, возможно, появится универсальная теория. Однако существует факт тяготения — если вы уроните любой предмет, он упадет. Подобно этому существует факт эволюции, несмотря на то, что споры ученых по частным вопросам теории продолжаются.
Однако существует факт тяготения — если вы уроните любой предмет, он упадет. Подобно этому существует факт эволюции, несмотря на то, что споры ученых по частным вопросам теории продолжаются.
Если обсуждать историю жизни на Земле, то следует рассмотреть две стадии, на каждой из которых события были обусловлены двумя разными принципами. На первой стадии процессы химической эволюции на древнейшей Земле привели к образованию первой живой клетки из неорганических материалов. На второй стадии потомки этой живой клетки развивались в разных направлениях, порождая многообразие жизни на планете, которое мы наблюдаем сегодня. На этой стадии развитие определял принцип естественного отбора.
Химическая эволюция
Человеческая мысль лишь сравнительно недавно обогатилась представлением о том, что мы можем понять процесс организации неживых материалов, в результате которого образуются простые живые системы. Важной вехой на пути к этому представлению был поставленный в 1953 году эксперимент Миллера—Юри, впервые показавший возможность возникновения основных биологических молекул в результате самых обычных химических реакций.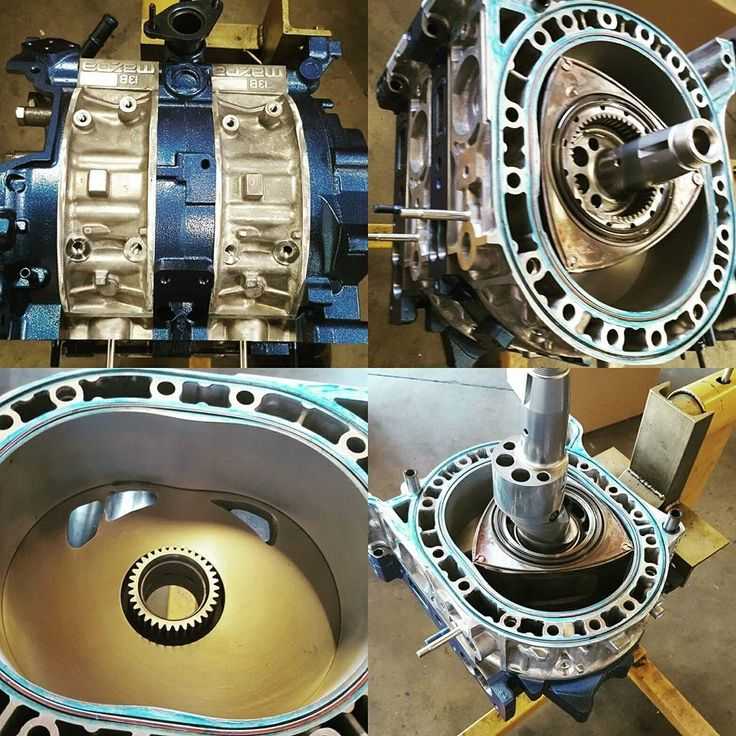 С тех пор ученые предложили много других путей, по которым могла идти химическая эволюция. Некоторые из этих идей перечислены ниже, но важно помнить, что до сих пор нет единого мнения о том, какой из этих путей может быть верным. Одно мы знаем точно: что один из этих процессов или другой процесс, до которого еще никто не додумался, привел к возникновению первой живой клетки на планете (если только жизнь не возникла в другом месте — представление о панспермии обсуждается в главе Кислоты и основания).
С тех пор ученые предложили много других путей, по которым могла идти химическая эволюция. Некоторые из этих идей перечислены ниже, но важно помнить, что до сих пор нет единого мнения о том, какой из этих путей может быть верным. Одно мы знаем точно: что один из этих процессов или другой процесс, до которого еще никто не додумался, привел к возникновению первой живой клетки на планете (если только жизнь не возникла в другом месте — представление о панспермии обсуждается в главе Кислоты и основания).
Первичный бульон. В результате процессов, воспроизведенных в эксперименте Миллера—Юри, в атмосфере образовались молекулы, упавшие с дождем в океан. Здесь (или, возможно, в водоеме, образованном приливом) неизвестный пока процесс привел к организации этих молекул, породивших первую клетку.
Первичное нефтяное пятно. Процессы Миллера—Юри могут давать начало липидам, молекулы которых спонтанно образуют маленькие сферы (вы часто видите такие каплевидные образования на поверхности супа). В каждой сфере собрано случайное число молекул. Один из миллионов пузырьков на поверхности океана мог содержать правильный набор молекул с точки зрения энергии и материалов, и мог поделиться пополам. Такой могла бы быть первая клетка.
В каждой сфере собрано случайное число молекул. Один из миллионов пузырьков на поверхности океана мог содержать правильный набор молекул с точки зрения энергии и материалов, и мог поделиться пополам. Такой могла бы быть первая клетка.
Мир РНК. Одна из проблем эволюционной теории связана развитием системы кодирования, основанной на использовании молекул РНК (см. также Центральная догма молекулярной биологии). Проблема в том, что белки закодированы на ДНК, но для того чтобы прочесть записанный ДНК код, нужна активность белков. Недавно ученые открыли, что РНК, которая в настоящее время участвует в преобразовании записанного на ДНК кода в белки, может также выполнять одну из функций белков в живых системах. Похоже, что образование молекул РНК было важнейшим событием в развитии жизни на земле.
Океанический путь. В условиях огромного давления, господствующего на дне океана, химические соединения и химические процессы могут быть совсем не такими, как на поверхности.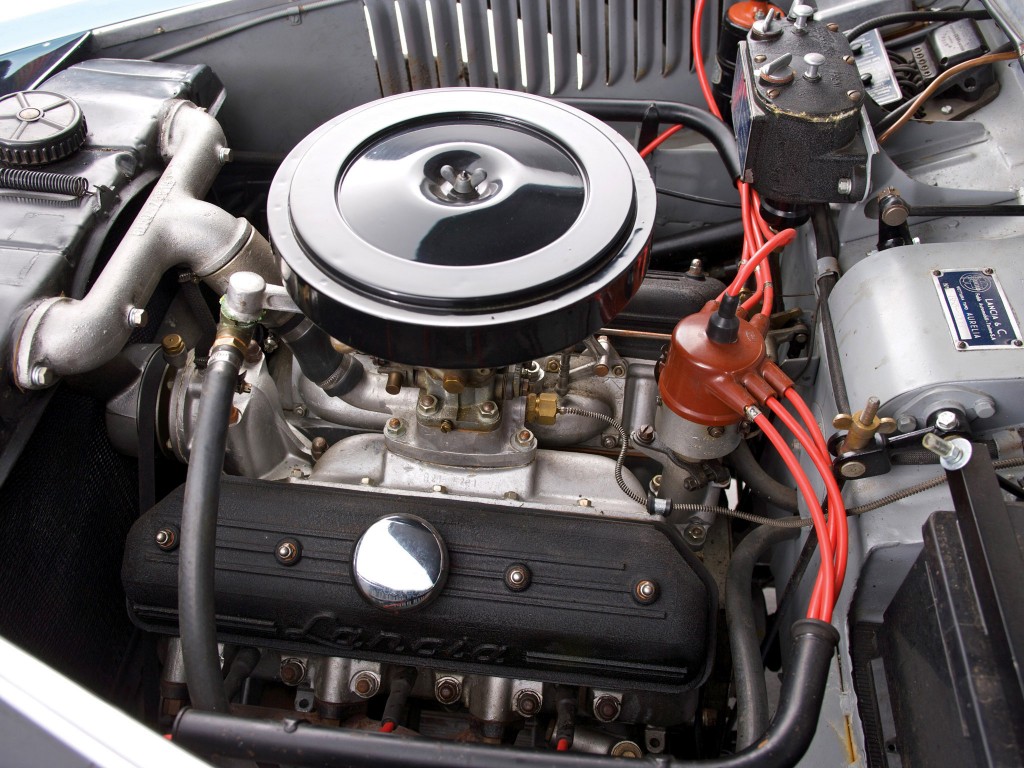 Ученые изучают химизм этой среды, который, возможно, мог способствовать развитию жизни. Если ответ на этот вопрос будет положительным, то жизнь могла зародиться на дне океана и позднее мигрировать на сушу.
Ученые изучают химизм этой среды, который, возможно, мог способствовать развитию жизни. Если ответ на этот вопрос будет положительным, то жизнь могла зародиться на дне океана и позднее мигрировать на сушу.
Автокаталитические комплексы. Эта концепция ведет начало от теории сложных саморегулирующихся систем. Согласно этому предположению, что химизм жизни не развивался ступенчато, а возник на стадии первичного бульона.
Глиняный мир. Первой моделью жизни могли быть не химические реакции, а статические электрические заряды на поверхности глины, покрывающей океанское дно. По этой схеме сборка сложных молекул жизни происходила не в результате случайных комбинаций, а благодаря электронам на поверхности глины, удерживающим небольшие молекулы вместе во время их сборки в более крупные молекулы.
Как вы видите, в идеях о способах развития жизни из неорганических материалов недостатка нет. Однако до конца 1990-х годов происхождение жизни не являлось приоритетной областью науки, никто особенно не стремился разобраться с этими теориями.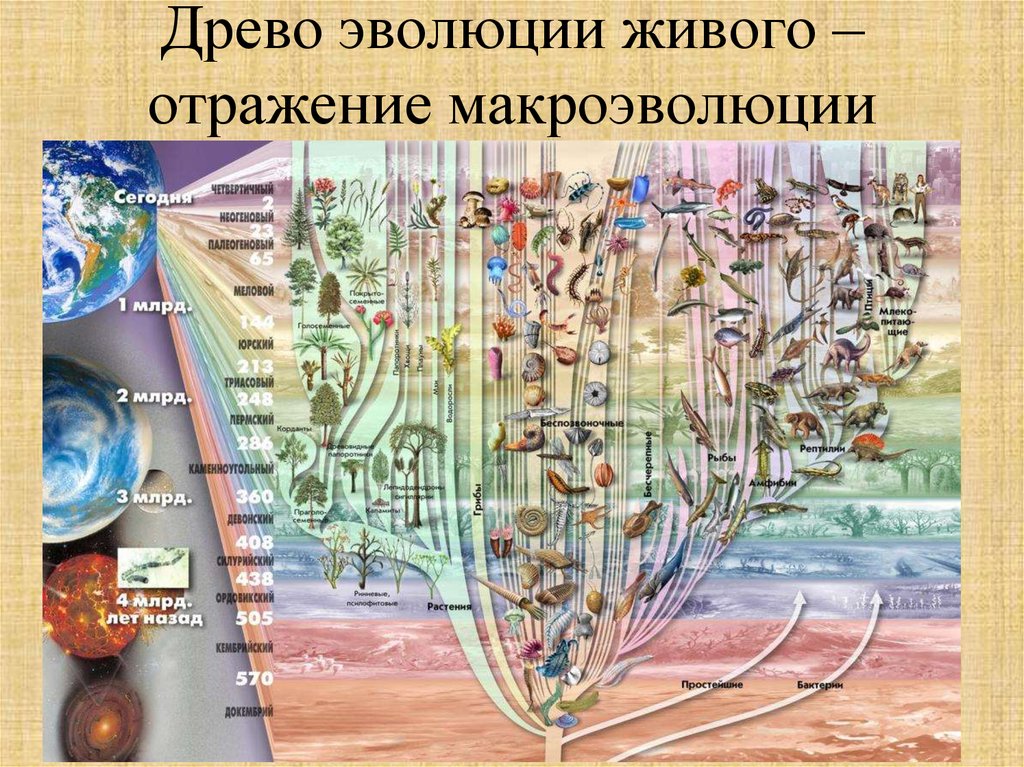 В 1997 году НАСА включила исследования происхождения жизни в список своих основных задач. Я надеюсь, что уже вскоре ученые смогут создать в своих лабораториях простые организмы, похожие на те, которые могли существовать на нашей планете 4 миллиарда лет назад.
В 1997 году НАСА включила исследования происхождения жизни в список своих основных задач. Я надеюсь, что уже вскоре ученые смогут создать в своих лабораториях простые организмы, похожие на те, которые могли существовать на нашей планете 4 миллиарда лет назад.
Естественный отбор
После появления на планете первого способного к воспроизведению живого организма жизнь «переключила скорость», и дальнейшие изменения направлял естественный отбор. Большинство людей, используя термин «эволюция», подразумевают именно естественный отбор. Представление о естественном отборе ввел английский натуралист Чарльз Дарвин, опубликовавший в 1859 году свой монументальный труд О происхождении видов путем естественного отбора или сохранении благоприятствуемых пород в борьбе за жизнь. Идея естественного отбора, к которой независимо от Дарвина пришел Алфред Рассел Уоллес (Alfred Russel Wallace, 1823–1913), основана на двух положениях: 1) представители любого вида в чем-то различаются между собой, и 2) всегда существует конкуренция за ресурсы. Первый из этих постулатов очевиден для каждого, кто наблюдал за любой популяцией (включая популяцию людей). Некоторые представители крупнее, другие быстрее бегают, окраска третьих позволяет им оставаться незаметными на фоне среды обитания. Второй постулат отражает прискорбный факт из жизни мира природы — рождается значительно больше организмов, чем выживает, и таким образом, происходит постоянная конкуренция за ресурсы.
Первый из этих постулатов очевиден для каждого, кто наблюдал за любой популяцией (включая популяцию людей). Некоторые представители крупнее, другие быстрее бегают, окраска третьих позволяет им оставаться незаметными на фоне среды обитания. Второй постулат отражает прискорбный факт из жизни мира природы — рождается значительно больше организмов, чем выживает, и таким образом, происходит постоянная конкуренция за ресурсы.
Вместе эти постулаты приводят к интересному выводу. Если некоторые особи обладают особенностью, позволяющей им успешней конкурировать в условиях определенной среды — например, развитая мускулатура хищников позволяет им успешнее охотиться — то для них увеличиваются шансы дожить до взрослого состояния и оставить потомство. И их потомство, вероятно, унаследует эту особенность. Пользуясь современной терминологией, мы скажем, что особи с высокой вероятностью передадут потомству гены, отвечающие за быстрый бег. С другой стороны, для плохих бегунов вероятность выжить и оставить потомство ниже, поэтому их гены могут и не перейти к следующему поколению. Поэтому в поколении «детей» особей с «быстрыми» генами будет больше, чем в поколении «родителей», а в поколении «внуков» — еще больше. Таким образом признак, повышающий вероятность выживания, в конце концов распространится по всей популяции.
Поэтому в поколении «детей» особей с «быстрыми» генами будет больше, чем в поколении «родителей», а в поколении «внуков» — еще больше. Таким образом признак, повышающий вероятность выживания, в конце концов распространится по всей популяции.
Этот процесс Дарвин и Уоллес назвали естественным отбором. Дарвин находил в нем сходство с искусственным отбором. Люди используют искусственный отбор для того чтобы выводить растения и животных, обладающих желаемыми признаками, отбирая для этого половозрелые особи и допуская только их до скрещивания. Если люди могут делать это, рассуждал Дарвин, то почему не может природа? Для возникновения разнообразия видов, которое мы наблюдаем на планете сегодня, более чем достаточно улучшенной выживаемости особей с адаптивными признаками в последовательных поколениях и на протяжении длительного периода времени.
Дарвин, сторонник доктрины униформизма, понимал, что образование новых видов должно происходить постепенно — различия между двумя популяциями должны усиливаться все больше и больше, до тех пор, пока скрещивание между ними не окажется невозможным.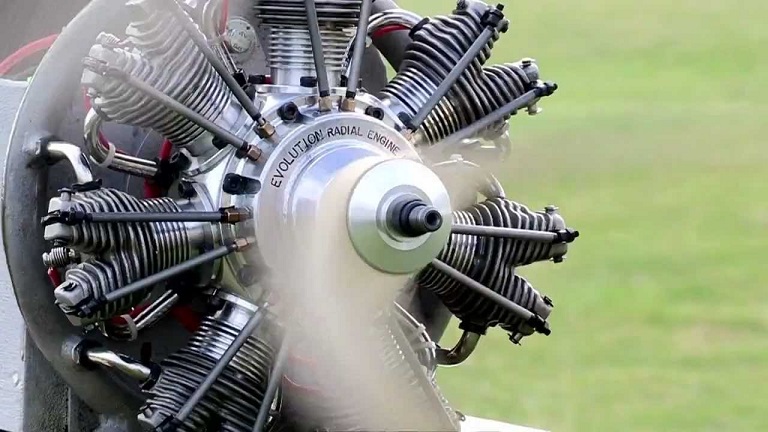 Позднее ученые обратили внимание на то, что эта закономерность не всегда соблюдается. Вместо этого вид в течение длительного времени остается неизменным, затем внезапно меняется — этот процесс называется перемежающимся равновесием. Действительно, изучая ископаемых, мы видим оба варианта видообразования, что не кажется странным с высоты современных представлений о генетике. Теперь нам понятна основа первого их двух перечисленных постулатов: на ДНК различных особей записаны различные версии одного и того же гена. Изменение ДНК может иметь совершенно разные последствия: от полного отсутствия эффекта (если изменение затрагивает участок ДНК, не используемый организмом) до громадного эффекта (если изменится ген, кодирующий ключевой белок). После того как ген изменится, что может сказаться постепенно или немедленно, действие естественного отбора будет направлено либо на то, чтобы распространить этот ген во всей популяции (если изменение полезное), либо на то, чтобы уничтожить его (если изменение вредное).
Позднее ученые обратили внимание на то, что эта закономерность не всегда соблюдается. Вместо этого вид в течение длительного времени остается неизменным, затем внезапно меняется — этот процесс называется перемежающимся равновесием. Действительно, изучая ископаемых, мы видим оба варианта видообразования, что не кажется странным с высоты современных представлений о генетике. Теперь нам понятна основа первого их двух перечисленных постулатов: на ДНК различных особей записаны различные версии одного и того же гена. Изменение ДНК может иметь совершенно разные последствия: от полного отсутствия эффекта (если изменение затрагивает участок ДНК, не используемый организмом) до громадного эффекта (если изменится ген, кодирующий ключевой белок). После того как ген изменится, что может сказаться постепенно или немедленно, действие естественного отбора будет направлено либо на то, чтобы распространить этот ген во всей популяции (если изменение полезное), либо на то, чтобы уничтожить его (если изменение вредное). Другими словами, скорость изменения зависит от генов, но когда такое изменение уже произошло, именно естественный отбор определяет направление изменений в популяции.
Другими словами, скорость изменения зависит от генов, но когда такое изменение уже произошло, именно естественный отбор определяет направление изменений в популяции.
Как любая научная теория, теория эволюция должна была получить подтверждение в жизни. Имеются три крупных класса наблюдений, подтверждающих эту теорию.
Ископаемые свидетельства
После гибели растения или животного останки обычно рассредоточиваются в окружающей среде. Но иногда некоторые из них могут погрузиться в почву, например, в ил при наводнении, и оказаться недоступными для разложения. Со временем, по мере того как ил будет превращаться в горную породу (см. Цикл преобразования горной породы) медленные химические процессы приведут к замещению кальция в скелете или других твердых частях тела минеральными веществами, содержащимися в окружающей породе. (В редких случаях условия оказываются такими, что могут сохраниться и более мягкие структуры, например, кожа или перья). В конце концов этот процесс завершится образованием идеального отпечатка оригинальной части тела в камне — окаменелости. Все обнаруженные окаменелости вместе называют ископаемыми свидетельствами.
Все обнаруженные окаменелости вместе называют ископаемыми свидетельствами.
Возраст ископаемых составляет приблизительно 3,5 миллиарда лет — столько лет отпечаткам, найденным в бывших отложениях тины на древних австралийских скалах. Они рассказывают увлекательную историю о постепенном усложнении и расширении многообразия, которое привело к огромному разнообразию жизненных форм, населяющих сегодня Землю. Большую часть прошлого жизнь была относительно простой, представленной одноклеточными организмами. Приблизительно 800 миллионов лет назад начали появляться многоклеточные жизненные формы. Поскольку их тело было мягким (вспомните медузу), от них почти не осталось отпечатков, и лишь несколько десятилетий назад ученые убедились в том, что они жили в ту эпоху, на основании оставленных в осадочных отложениях отпечатков. Приблизительно 550 миллионов лет назад появились твердые покровы и скелеты, и именно с этого момента появляются настоящие ископаемые. Рыбы — первые позвоночные животные, появились около 300 миллионов лет назад, динозавры начали вымирать приблизительно 65 миллионов лет назад (см. Массовые вымирания), и 4 миллиона лет назад в Африке появились ископаемые люди. Обо всех этих событиях можно прочитать в Летописи ископаемых.
Массовые вымирания), и 4 миллиона лет назад в Африке появились ископаемые люди. Обо всех этих событиях можно прочитать в Летописи ископаемых.
Биохимические свидетельства
У всех живых организмов на нашей планете одинаковый генетический код — мы все не более чем набор различной информации, записанной универсальным языком ДНК. Тогда можно ожидать, что если жизнь развивалась по описанному выше сценарию, то у современных живых организмов степень совпадения последовательностей ДНК должна быть различной, в зависимости от того, насколько давно жил их общий предок. Например, у человека и шимпанзе одинаковых последовательностей ДНК должно быть больше, чем у человека и рыбы, поскольку общий предок человека и шимпанзе жил 8 миллионов лет назад, а общий предок человека и рыбы — сотни миллионов лет назад. Действительно, анализируя ДНК живых организмов, мы находим подтверждения этого предположения: чем дальше друг от друга на эволюционном дереве находятся два организма, тем меньше сходства обнаруживается в их ДНК. И это вполне понятно, поскольку чем больше прошло времени, тем больше накопилось у них различий.
И это вполне понятно, поскольку чем больше прошло времени, тем больше накопилось у них различий.
Использование анализа ДНК для того, чтобы открыть наши глаза на наше эволюционное прошлое, иногда называют молекулярными часами. Это убедительнейшее доказательство теории эволюции. ДНК человека ближе к ДНК шимпанзе, чем к ДНК рыбы. Могло бы оказаться совсем наоборот, но не случилось. На языке философии науки, этот факт показывает, что теория эволюция опровергаема — можно представить себе исход, который указывал бы на ложность этой теории. Таким образом, эволюция не является так называемым креационистским учением, как бы основанным на библейской Книге бытия, поскольку нет таких наблюдений или экспериментов, которые могли бы осязаемо убедить креационистов в том, что их учение ложно.
Несовершенство замысла
Хотя несовершенство замысла как таковое не является доводом в пользу эволюции, оно совершенно согласуется с картиной жизни, предложенной Дарвином, и противоречит представлению о том, что живые существа были созданы, уже имея особое предназначение в жизни. Дело в том, что для того чтобы передать гены следующему поколению, организму нужно быть не совершенным, а всего лишь настолько хорошим, чтобы успешно противостоять врагам. Следовательно, каждая ступень на эволюционной лестнице должна быть пристроена к предыдущей, и характеристики, которые могли быть благоприятствующими на одной из стадии, будут «заморожены» и сохранятся даже после того, как появятся более подходящие варианты.
Дело в том, что для того чтобы передать гены следующему поколению, организму нужно быть не совершенным, а всего лишь настолько хорошим, чтобы успешно противостоять врагам. Следовательно, каждая ступень на эволюционной лестнице должна быть пристроена к предыдущей, и характеристики, которые могли быть благоприятствующими на одной из стадии, будут «заморожены» и сохранятся даже после того, как появятся более подходящие варианты.
Инженеры называют эту особенность QWERTY-эффектом (QWERTY — последовательность букв верхнем ряду почти всех современных клавиатур). Когда проектировали первые клавиатуры, основная цель заключалась в том, чтобы снизить скорость печати и не допустить зажимания клавиш механических пишущих машинок. Такая конструкция клавиатуры сохранилась до сих пор, несмотря на возможность использования производительных клавиатур.
Подобно этому особенности строения «закрепляются» на ранних стадиях эволюции и сохраняются в прежнем виде, несмотря на то, что любой современный студент-технарь справился бы с этой задачей лучше. Вот несколько примеров.
Вот несколько примеров.
Глаз человека устроен так, что падающий свет превращается в нервные импульсы перед сетчаткой, хотя по такой схеме в глаз попадает не весь падающий свет.
Зеленый цвет листьев растений означает, что они отражают часть падающего на них света. Любому инженеру известно, что приемник солнечной энергии должен быть черного цвета.
В глубоких подземных пещерах обитают змеи, у которых глазницы находятся под кожей. Это имеет смысл, если предки этих змей жили на поверхности и нуждались в глазах, но лишено смысла для животных, созданных для подземной жизни.
В туловище китов есть маленькие кости задних конечностей. Сегодня эти кости абсолютно бесполезны, но их происхождение понятно, если предки китов когда-то жили на суше.
Неизвестно, какую функцию выполняет аппендикс у человека, хотя у некоторых травоядных животных аппендикс участвует в переваривании травы.
Эти свидетельства дополняют друг друга и настолько грандиозны, что не только давно убедили серьезных ученых в справедливости эволюционной теории Дарвина, но и являются стержнем любых разъяснений, касающихся функционирования живых систем на нашей планете.
Немецкая грамота: что означают индексы BMW
- Главная
- Статьи
- Немецкая грамота: что означают индексы BMW
BMW 3200 CS, BMW 525iX, BMW 750Li… Что значит вся эта маркировка? Мы взялись навести порядок в сложной системе букв и цифр и разложить по полочкам, как расшифровать надпись на корме баварского «скакуна».
Чтобы стать настоящим гуру BMW, вам стоит прочитать две наши предыдущие публикации, посвященные эволюции различных серий марки: как легковых, так и спортивных.
Серийно выпускаемые BMW за редким исключением всегда имели цифро-буквенные названия. Суффиксы в виде букв и слов после цифр не только дают более полную характеристику двигателя, но и несут информацию о типе привода, кузова, длине базы. .. Вот наиболее актуальные из этих символов:
.. Вот наиболее актуальные из этих символов:
• A (упразднено) = автоматическая трансмиссия,
• C (упразднено) = кузов «купе»,
• c = кабриолет,
• d = дизельный двигатель,
• e = автомобиль с широким использованием технологий энергосбережения,
• eDrive = подзаряжаемый от сети гибридный автомобиль, использующий бензиновый и электрический двигатели,
• EfficientDynamics Edition — автомобиль с широким использованием технологий энергосбережения,
• g = двигатель, работающий на сжатом природном газе,
• hydrogen — двигатель, работающий на водороде,
BMW 2002 Automatic
• i = инжекторная система подачи топлива,
• L = удлиненная колесная база,
• s (упразднено) = спортивный автомобиль (также использовалось для обозначения 2-дверного кузова БМВ 3-й серии E36),
• sDrive = привод на задние колеса,
• t / Turbo = турбонаддув,
• T / touring = универсал,
• Ti (упразднено) = обозначение 3-дверного хэтчбека BMW E36 Compact,
• x / xDrive = полный привод.
Буквы
Особняком стоят модели линейки Active Hybrid (гибридные автомобили, использующие бензиновый и электрический двигатели). В нее входят Active Hybrid 3, Active Hybrid 5 и Active Hybrid 7, относящиеся к соответствующим сериям BMW.
BMW ActiveHybrid 7
Существует и префикс в виде буквы M, означающий, что автомобиль имеет компоненты, созданные подразделением BMW M Gmbh. Не следует путать полноценные М-модели и машины, имеющие опции в виде стайлинга, модифицированной подвески, тормозов и прочих деталей, которые были разработаны в M Gmbh.
М-модели в наименовании имеют только букву М и следующую за ней цифру, обозначающую принадлежность к серии, например, М3, М5, М6. Исключение — М-версии машин Z3 и Z3 Coupe, называвшиеся BMW M Roadster и BMW M coupe, а также 1M Coupe, построенное на основе “единички” BMW E82. Автомобили с М-аксессуарами же отличаются префиксом М перед привычным цифробуквенным именем: M 550d xDrive, M550i.
BMW M5
Цифры
С цифрами в названиях всё непросто. Как упоминалось в самой первой статье, отражение приблизительного объема двигателя в литрах в наименованиях машин закрепилось лишь в в конце 50-х — начале 60-х годов. Так, «Изетта» 250 довольствовалась скромным 250-кубовым моторчиком, BMW 3200 CS имел 3.2-литровый 6-цилиндровый двигатель, а BMW 1600 – 1.6-литровый 4-цилиндровый. Машины на полступеньки ниже классом BMW 1600-2 (впоследствии BMW 1602) и BMW 2002 оснащались 1.6-литровым и 2-литровым моторами соответственно, а цифра 2 в конце означала наличие двух дверей.
По мере расширения модельного ряда стало ясно, что такая система не позволяет различать классы машин при использовании двигателей одинакового объема. Тогда новая «пятерка» с индексом E12 ввела новый стандарт из трех цифр: первая обозначала внутрикорпоративный класс машины, последние, как и ранее, — приблизительный объем двигателя в литрах. Теперь «пятерка» с двигателем объемом 1 990 кубических сантиметров называлась BMW 520i, а мотор в 2 788 «кубиков» принадлежал BMW 528i.
Теперь «пятерка» с двигателем объемом 1 990 кубических сантиметров называлась BMW 520i, а мотор в 2 788 «кубиков» принадлежал BMW 528i.
BMW 520i
Стройную систему, как и в случае с номенклатурой Mercedes-Benz, нарушило появление турбокомпрессора. Но если штутгартцы столкнулись с проблемами только в самом конце ХХ века, то баварцы — на пару десятилетий раньше.
Пара модификаций «семерок» E23 1979 года называлась 732i (6-цилиндровый двигатель объемом 3 210 кубических сантиметров) и 735i (3 430 «кубиков» округлили почему-то в большую сторону, но на эту неточность можно закрыть глаза).
В 1980 году начался выпуск BMW 745i. Думаете, она оснащалась 4.5-литровым двигателем? Как бы не так: это был мотор от 732i с турбокомпрессором. Тем не менее для подчеркивания большей производительности и дороговизны машины новой версии представительского седана умышленно присвоили «неправильный», завышенный индекс. К слову, в 1983 году у нее появился уже двигатель от 735i с турбокомпрессором, но индекс остался прежним, 745i.
К слову, в 1983 году у нее появился уже двигатель от 735i с турбокомпрессором, но индекс остался прежним, 745i.
BMW 735i
Впрочем, случалось и занижение реального объема двигателя. Так, BMW E30 316i с 1982 по 1987 год производилась с мотором объемом 1 766 кубических сантиметров, а статусное купе 8-й серии постоянно скромничало: BMW 840Ci c 1995 по 1999 год предлагалось с 4.4-литровым двигателем, 850Ci приводилось в движение 5.4-литровым мотором, а флагман 850CSi — аж 5.6-литровым.
Тем не менее в последние лет 10 случаи «мошенничества» с индексами участились. Рассмотрим несколько примеров. «Единичка» BMW 130i выпускалась с 2005 по 2013 год, 125i — с 2008 по 2013 год. Можно было бы предполагать, что как минимум у 125i был двигатель меньшего объема, чем у 130i, однако в реальности использовался один и тот же мотор N52B30 разной степени форсировки — 218 л.с. для 125i и 265 (258 c 2009 года) для 130i.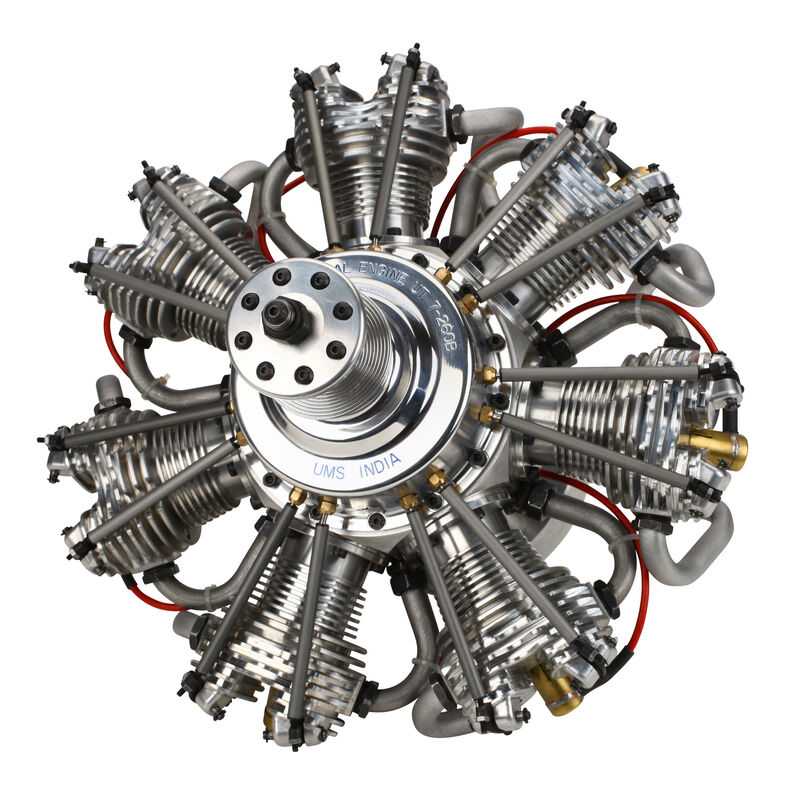 Конечно же, с точки зрения маркетинга владельцу 130i нужно было угодить и продемонстрировать превосходство более мощной версии «единички» над менее мощной в виде шильдика на крышке багажника. По той же причине разнесены индексы нынешних F20 114i, 116i, 120i, которые агрегируются с 1.6-литровым турбированным двигателем N13B16.
Конечно же, с точки зрения маркетинга владельцу 130i нужно было угодить и продемонстрировать превосходство более мощной версии «единички» над менее мощной в виде шильдика на крышке багажника. По той же причине разнесены индексы нынешних F20 114i, 116i, 120i, которые агрегируются с 1.6-литровым турбированным двигателем N13B16.
BMW 125i
BMW E63 среди ряда модификаций имела 635d и 630i. Последняя была самой дешевой (если это слово вообще применимо к премиальному купе класса «Гран Туризмо») среди всех версий 6-й серии, объем ее двигателя составлял 2 996 кубических сантиметров. У более же дорогой 635d объем мотора 2 993 «кубика», то есть формально меньше, чем у 630i, но мощность дизеля даже после обновления бензинового мотора оставалась больше на символические 14 л.с. Думаю, не нужно объяснять, почему же индекс дизельной версии больше, чем у бензиновой…
Бывают и совсем курьезные случаи. Можно догадаться, что BMW F30 320i и 328i оснащаются разными вариантами одного и того же 2-литрового бензинового двигателя. Кроме того, есть 320d и 328d. Нюанс в том, что двигатели в этих машинах идентичные, но 328d продается на американском рынке, под вкусы покупателей которого и «заточено» название. Ведь жители Штатов не жалуют машины с маленькими моторами…
Можно догадаться, что BMW F30 320i и 328i оснащаются разными вариантами одного и того же 2-литрового бензинового двигателя. Кроме того, есть 320d и 328d. Нюанс в том, что двигатели в этих машинах идентичные, но 328d продается на американском рынке, под вкусы покупателей которого и «заточено» название. Ведь жители Штатов не жалуют машины с маленькими моторами…
Что в итоге?
Безоговорочно доверять цифрам в обозначении моделей теперь нельзя. Они превратились в довольно абстрактные величины, указывающие лишь на тот факт, что в пределах одной серии модель с меньшим числом в индексе менее мощная, чем с большим. К счастью, в буквенных префиксе и суффиксах пока еще правда есть…
Читайте также:
история
BMW
BMW X3
Great Wall
Great Wall M2
Новые статьи
Статьи / Авто с пробегом
Suzuki Jimny III c пробегом: контрактный мотор за 15 тысяч, безнадежная МКП и опасный тюнинг
В первой части материала мы выяснили, насколько обманчивым может быть внешне ухоженный экземпляр Jimny, как непросто найти не подверженный коррозии вариант и стоит ли этого бояться. Но на…
Но на…
51
0
0
14.09.2022
Статьи / Популярные вопросы
Я еду непристегнутым: что за это грозит, когда это законно и кто платит штраф за пассажира
Отношение к ремню безопасности у российских водителей остается незрелым: кому-то он мешает, кого-то пугает, кому-то оказывается «не по статусу», а кого-то даже оскорбляет. Но сегодня мы оста…
468
2
13
12.09.2022
Статьи / Авто с пробегом
5 причин покупать и не покупать Infiniti FX II / Infiniti QX70
Вы молоды душой и телом, пока что не обременены большой семьей, неплохо зарабатываете и хотите ездить на мощной, яркой, дерзкой машине.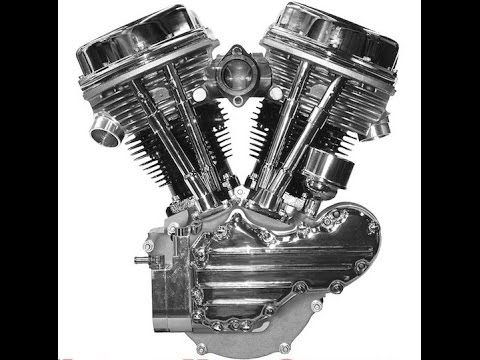 Только вот беда: те же BMW X6 и Mercedes GLC AMG вам в…
Только вот беда: те же BMW X6 и Mercedes GLC AMG вам в…
1604
8
3
11.09.2022
Популярные тест-драйвы
Тест-драйвы / Тест-драйв
Полный привод, самый мощный мотор и силы в запасе: первый тест Chery Tiggo 8 PRO MAX
Появление в российской линейке Chery модели Tiggo 8 PRO MAX можно назвать знаковым для бренда. Почему? Да хотя бы потому, что это первый с 2014 года полноприводный кроссовер Chery, приехавши…
17732
12
44
29.04.2022
Тест-драйвы / Тест-драйв
Компактный, доналоговый, с V8 и 16 лет без ремонтов: опыт владения Ford Explorer III
Принято считать, что «ездить долго и счастливо» – это не про 15-летние машины. Тем не менее чудеса случаются, и иногда безупречный по техническому состоянию классический рамный внедорожник м…
Тем не менее чудеса случаются, и иногда безупречный по техническому состоянию классический рамный внедорожник м…
13060
6
20
14.04.2022
Тест-драйвы / Тест-драйв
Мотор от Mercedes, эмблема от Renault, сборка от Dacia: тест-драйв европейского Logan 1,0
Казалось бы, что нового можно рассказать про Renault Logan второго поколения, известный каждому российскому таксисту, что называется, вдоль и поперёк? Однако конкретно в этом автомобиле есть…
9316
10
41
13.08.2022
Как устроены двигатели
Рейтинг
отзывов
4
Длительность
2
часа
Автобусы, машины, самолеты, метро, ракеты и даже ядерные установки — механизмы, сердца которых — двигатели, окружают нас повсюду. Если двигатели разом сломаются — наш мир встанет на «паузу»: от доставки продуктов до транспортного сообщения между странами и некоторых научных свершений. Давайте не будем ждать и разберемся в теории заранее. На лекции узнаем историю и строение двигателей и даже увидим, в чем их красота.
Если двигатели разом сломаются — наш мир встанет на «паузу»: от доставки продуктов до транспортного сообщения между странами и некоторых научных свершений. Давайте не будем ждать и разберемся в теории заранее. На лекции узнаем историю и строение двигателей и даже увидим, в чем их красота.
программа
- Начнем с определений: что такое двигатель и КПД.
- Изучим паровые машины и принципы их действия.
- Разберемся с двигателями внутреннего сгорания: кто изобрел, как работают и где можно встретить.
- Посмотрим на авиационные и ракетные двигатели: чем отличаются и как проектируются.
- Познакомимся с электродвигателями и научимся распознавать статор и ротор.
- Обсудим ядерные двигательные установки и поймем, почему разработку проектов часто не получалось закончить.
- По итогу убедимся, что физика — это не теоремы у школьной доски, а законы материй вокруг нас.
лектор
лектор
Егор Рабеко
Инженер-проектировщик самолетостроения, учитель физики в Хорошколе
Тема показалось неожиданной, зато узнала много базовой инофрмации по устройству дигателей. Для новичков в теме — самое оно)
Для новичков в теме — самое оно)
Дина Дина
о лекции
«Как устроены двигатели»
22 сентября 2020
Спасибо за лекцию! Захватило за несколько секунд.
Егор очень просто и доступно рассказал о том, как устроены двигатели (подойдет для людей с любым уровнем технической подготовки). Очень жаль, что в мое время не было таких прекрасных учителей!
Отдельное спасибо за интерактивные задания — добавляет «изюминки» и держит внимание 🙂
По искусству и гуманитарным наукам лекций много, а по естественно-научным — не очень. Так что за одну тему поставила бы пять дополнительных звездочек.
Евгения Токарева
о лекции
«Как устроены двигатели»
22 сентября 2020
Очень интересная лекция об эволюции двигателей. На ней простыми словами объясняется устройство разных двигателей: от паровой машины до ядерных ракетных установок, а пройденный материал закрепляется с помощью интерактивных заданий👍🏼
На ней простыми словами объясняется устройство разных двигателей: от паровой машины до ядерных ракетных установок, а пройденный материал закрепляется с помощью интерактивных заданий👍🏼
Маргарита Жукова
о лекции
«Как устроены двигатели»
19 сентября 2020
До лекции переживала, что будет сложно из-за технической темы, но лектор рассказывал очень понятно и интересно. Можно смело идти, даже если про двигатели ничего не знаете 🙂
Отдельное спасибо за схемы на слайдах и интерактивные задания — с ними все запомнилось гораздо лучше!
Екатерина Повстяная
о лекции
«Как устроены двигатели»
15 сентября 2020
Эта лекция доступна в записи
Можно посмотреть прямо сейчас
Доступ в течение 3 месяцев
Это не студийное видео, а запись вебинара
Купить запись лекции
Отзывы
о лекции
Рейтинг
отзывов
4
Длительность
2
часа
, если вы посещали эту лекцию и хотите оставить отзыв
Сортировать по
Лекция
«Как устроены двигатели»
Тема показалось неожиданной, зато узнала много базовой инофрмации по устройству дигателей. Для новичков в теме — самое оно)
Для новичков в теме — самое оно)
Лекция
«Как устроены двигатели»
Спасибо за лекцию! Захватило за несколько секунд.
Егор очень просто и доступно рассказал о том, как устроены двигатели (подойдет для людей с любым уровнем технической подготовки). Очень жаль, что в мое время не было таких прекрасных учителей!
Отдельное спасибо за интерактивные задания — добавляет «изюминки» и держит внимание 🙂
По искусству и гуманитарным наукам лекций много, а по естественно-научным — не очень. Так что за одну тему поставила бы пять дополнительных звездочек.
Лекция
«Как устроены двигатели»
Очень интересная лекция об эволюции двигателей. На ней простыми словами объясняется устройство разных двигателей: от паровой машины до ядерных ракетных установок, а пройденный материал закрепляется с помощью интерактивных заданий👍🏼
Лекция
«Как устроены двигатели»
До лекции переживала, что будет сложно из-за технической темы, но лектор рассказывал очень понятно и интересно. Можно смело идти, даже если про двигатели ничего не знаете 🙂
Можно смело идти, даже если про двигатели ничего не знаете 🙂
Отдельное спасибо за схемы на слайдах и интерактивные задания — с ними все запомнилось гораздо лучше!
новинка
Покупайте сертификат на 5, 10 или 20 лекций вместо отдельных лекций и экономьте до 40%
Подробнее
образовательный проект level one
Начните разбираться
в сложных
темах
с самыми вдохновляющими экспертами
Только проверенные лекторы
23 тысячи отзывов
на лекции и практикумы
Вам понравится
4,9 из 5,0
средний рейтинг лекции
Есть из чего выбрать
До 10 разных
вебинаров в день
подписка
Пишем два раза в неделю. В письмах рассказываем о скидках и о том, куда стоит сходить прямо сейчас. Даем полезные лайфхаки, знакомим с лекторами и форматами обучения.
Вы подписаны 👍
История АВТОВАЗа: от «копейки» до Х-дизайна
20 июля 1966 года было подписано правительственное постановление «О строительстве в городе Тольятти автомобильного завода».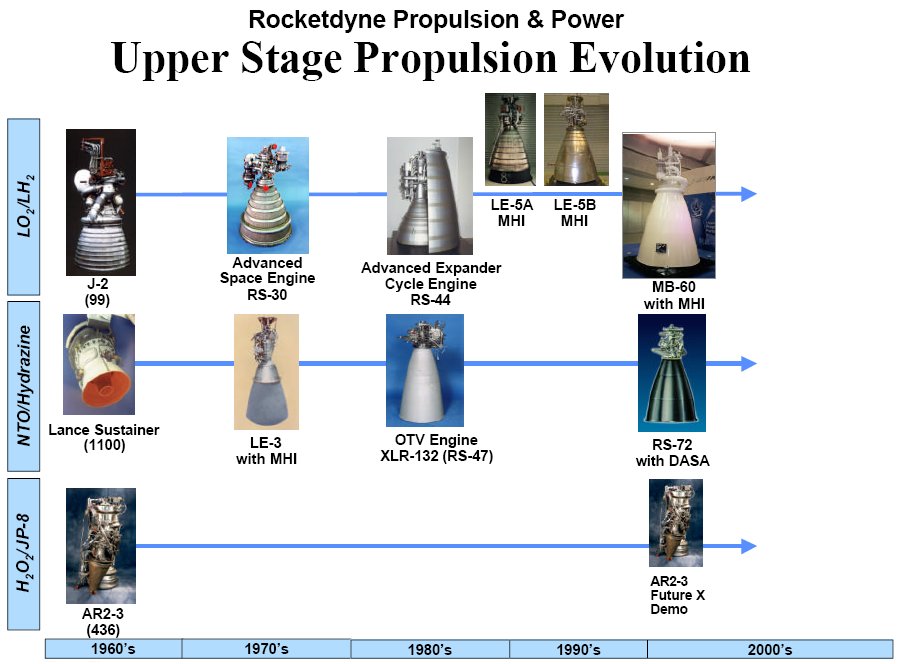 С тех пор эта дата считается днем рождения АВТОВАЗа.
С тех пор эта дата считается днем рождения АВТОВАЗа.
Предприятие стало одним из крупнейших производителей легковых автомобилей в Европе. За всю историю автозавода в Тольятти было собрано более 29 млн машин 50 различных серийных моделей. Каждая новая модель становилась событием не только в масштабах предприятия, но и всей страны. История АВТОВАЗа – это история отечественного автопрома.
Предлагаем вспомнить, с чего все начиналось 53 года назад, как появлялись знаковые вазовские модели, которые оказали значительное влияние на развитие автозавода и страны.
Рождение автогиганта
Советские граждане могли приобретать автомобили еще в начале 1950-х годов, но тогда выбор был невелик: самым доступным по цене легковым автомобилем являлся «Москвич», самым дорогим – «Победа». Количество выпускаемых «Москвичей» было недостаточным, чтобы покрыть спрос.
Страна нуждалась в по-настоящему «народном автомобиле». В какое-то время на эту роль претендовал даже «Запорожец». Однако многие слои населения автомобиль, относившийся к микролитражному классу, не устраивал. В итоге правительство предложило построить новый автомобильный завод, который мог бы выпускать свыше полумиллиона легковых автомобилей в год и таким образом удовлетворять автомобильный бум в стране.
Для ускорения создания такого предприятия было решено привлечь иностранных специалистов. Выбор пал на итальянский концерн FIAT, легковые автомобили которого были популярны в Европе. В частности, в 1966 году концерн представил свою новую модель FIAT 124, признанную «автомобилем года». Производство именно этой машины и предстояло освоить в СССР.
Решение о строительстве нового автомобильного завода в городе Тольятти было официально принято 20 июля 1966 года. Стройка стала грандиозной – оборудование для нового предприятия изготавливали на 844 машиностроительных заводах СССР, на 900 заводах других стран, в том числе ФРГ, Италии, Великобритании, Франции.
На такую масштабную стройку было выделено шесть лет, однако предприятие было возведено в рекордные сроки – за три с половиной года. Уже в 1970 году с конвейера ВАЗа сошли первые шесть автомобилей ВАЗ-2101 «Жигули».
Первая «копейка» в копилке моделей
Первая модель была создана на платформе FIAT 124, однако можно сказать, что это был уже другой автомобиль. Собранный полностью из местных комплектующих, он имел по сравнению с прототипом более 800 доработок, которые были призваны приспособить автомобиль к местным дорогам и климату. В частности, был усилен кузов, увеличен дорожный просвет. Кроме того, ВАЗ-2101 обзавелся новым, более мощным, карбюраторным двигателем объемом 1,2 л.
ВАЗ-2101, или «копейка», как прозвали этот автомобиль в народе, не только сократил автомобильный дефицит в стране, но перевернул представление советских автолюбителей о легковых машинах. Высокий уровень комфорта, хорошая динамика, легкость управления, экономичность позволили в кратчайшие сроки первому автомобилю Волжского автомобильного завода стать по-настоящему «народным» автомобилем.
Высокий уровень комфорта, хорошая динамика, легкость управления, экономичность позволили в кратчайшие сроки первому автомобилю Волжского автомобильного завода стать по-настоящему «народным» автомобилем.
ВАЗ-2101 и его модификации выпускались до 1988 года, за это время было выпущено около 4,8 млн «копеек». Но и сегодня, спустя три десятилетия после того как с конвейера сошла последняя «копейка», многие из них в отличном состоянии бегают по дорогам страны и за рубежом. Кстати, с 1971 года автомобили ВАЗ-2101 поставлялись за рубеж. Именно тогда автомобиль получил экспортное имя LADA, в то время как на внутреннем рынке машина известна была как «Жигули» (по названию гор).
Популярная «шестерка»: четыре миллиона авто
Второй самой популярной за всю историю АВТОВАЗа моделью является «шестерка» (ВАЗ-2106). Ее серийное производство началось в 1976 году и продолжалось вплоть до 2006 года. Всего было выпущено более 4 млн «шестерок».
Базой для ВАЗ-2106 стал автомобиль FIAT 124 Speciale 1972 года. «Шестерка» имела сравнительно мощный двигатель объемом 1,6 л и мощностью 75 л. с. и развивала скорость до 152 км/час.
Это был четырехдверная пятиместная модель с четырех- или пятиступенчатой коробкой передач и кузовом типа «седан». В отделке нового автомобиля появились современные детали: пластмассовая окантовка передних фар, радиаторная решетка, подсветка номерного знака. В салонах улучшилась шумоизоляция, передние сиденья снабдили подголовниками, а кресла – рельефностью.
«Нива»: всегда готова к трудностям
В 1977 году на Волжском автозаводе вышел с конвейера первый ВАЗ-2121 «Нива». Эта модель открыла новую эру в истории полноприводных машин. На внедорожниках тех времен основной ведущей осью была задняя, а передняя подключалась при съезде на бездорожье. «Нива» в любой момент готова к преодолению трудных участков, так как на ней полный привод задействован всегда. Впервые на внедорожнике такого класса были применены «легковые» атрибуты, такие как несущий кузов, независимая передняя подвеска, передние дисковые тормоза. Также, в отличие от внедорожников того времени, «Нива» получила высокооборотный двигатель.
Впервые на внедорожнике такого класса были применены «легковые» атрибуты, такие как несущий кузов, независимая передняя подвеска, передние дисковые тормоза. Также, в отличие от внедорожников того времени, «Нива» получила высокооборотный двигатель.
Ну и, пожалуй, самый примечательный факт: ВАЗ-2121 «Нива» стал первым полностью оригинальным автомобилем, разработанным на Волжском автозаводе.
«Нива» ВАЗ-2121 является наиболее экспортируемым советским и российским автомобилем. Были времена, когда до 70% «Нив» поставлялось за рубеж. Праворульная модификация «Нивы» даже продавалась в Японии, Великобритании и других странах с левосторонним движением.
Всего с 1977 года было выпущено около 2,5 млн внедорожников ВАЗ-2121. За свой путь «Нива» прошла несколько циклов модернизации, в 2005 году сменила название на LADA 4х4. Самая современная модификация – Urban. Машина получила кондиционер, электропакет, пластиковые бамперы в цвет кузова, металлизированную окраску, литые диски колес, более комфортабельный салон.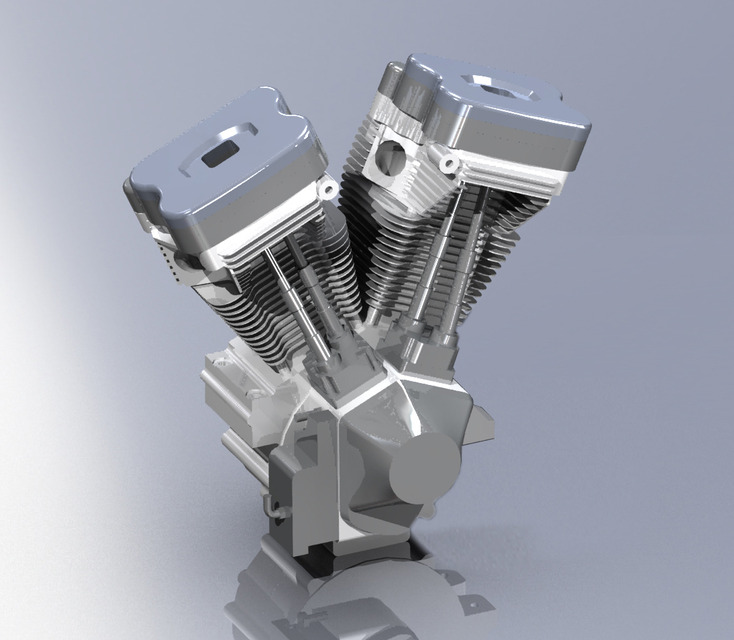 При этом сохранен постоянный полный привод и раздаточная коробка с понижающей передачей. Обновления продолжаются и в настоящее время. Например, в 2016 году на LADA 4х4 появились газонаполненные амортизаторы и необслуживаемые подшипники передних ступиц.
При этом сохранен постоянный полный привод и раздаточная коробка с понижающей передачей. Обновления продолжаются и в настоящее время. Например, в 2016 году на LADA 4х4 появились газонаполненные амортизаторы и необслуживаемые подшипники передних ступиц.
Новая эпоха: последние модели с советскими корнями
После распада Союза Волжский автозавод оказался в тяжелом состоянии, как и многие предприятия в стране. Но уже к середине 1990-х предприятию удалось наладить собственное производство автомобилей.
Первой моделью АВТОВАЗа в постсоветское время стала «десятка» – ВАЗ-2110. Из-за трудностей переходного периода она вышла с задержкой на три года, лишь в 1995-м. На российском рынке этот автомобиль вполне мог конкурировать с популярными иномарками того времени, такими как Daewoo Nexia, Audi 80 или даже Opel Astra. Почти сразу была выпущена так называемая «одиннадцатая» модель, а еще через несколько лет АВТОВАЗ выпустил ВАЗ-2112.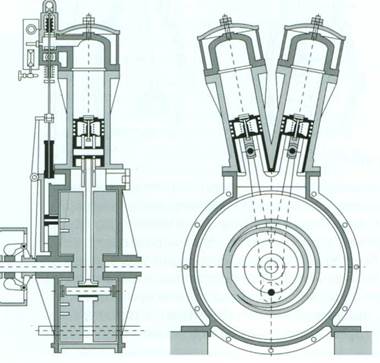 В 2007 году с конвейера выходит Priora ‒ последняя модель АВТОВАЗа с советскими корнями (за исключением LADA 4×4).
В 2007 году с конвейера выходит Priora ‒ последняя модель АВТОВАЗа с советскими корнями (за исключением LADA 4×4).
В 2008 году, в период экономического кризиса, АВТОВАЗ наладил сотрудничество с компанией Renault. Это послужило стимулом для получения финансовой поддержки от российского правительства и открыло новую страницу в истории развития предприятия. В партнерстве с французским концерном были созданы новые модели LADA: Largus, Granta и Kalina второго поколения.
Новейшая история: время «икс»
Новые времена потребовали новых автомобилей. Объединившемуся с Renault и Nissan АВТОВАЗу нужна была новая платформа, способная конкурировать с европейскими и корейскими популярными моделями. Так появилась Vesta, ставшая основой новейшей истории АВТОВАЗа.
Днем рождения Vesta можно считать 10 июня 2010 года, когда была представлена идея новой платформы АВТОВАЗа, которая должна к 2020 году обеспечить смену модельного ряда. Особенность этой машины не только в конструкции. Появление LADA Vesta значительно повысило имидж марки: по статистике, сегодня каждый третий покупатель LADA Vesta пересаживается на нее с автомобиля другой марки.
Особенность этой машины не только в конструкции. Появление LADA Vesta значительно повысило имидж марки: по статистике, сегодня каждый третий покупатель LADA Vesta пересаживается на нее с автомобиля другой марки.
Новые модели LADA Vesta и LADA XRAY, которые вышли в 2015 году, стали настоящим прорывом для марки. Используемая Х-графика – это отличительная черта современного АВТОВАЗа. Стиль разработан командой дизайнеров завода во главе с директором по дизайну Стивом Маттином. Главные акценты нового стиля LADA – это четко выраженная Х-графика, объединяющая фары, решетку радиатора и нижние воздухозаборники, подкрепленная двумя индивидуальными хромированными элементами буквы X.
После начала выпуска обеих моделей АВТОВАЗ распространяет новый стиль LADA и на другие существующие и перспективные модели. Формируется более понятный и современный модельный ряд. У каждого потребительского сегмента свои модели: семейство LADA Granta – это бюджетные автомобили, Vesta и XRAY – автомобили подороже, и две узкоспециализированные модели – LADA 4×4 и Largus.
Самой популярной LADA по итогам продаж за первую половину 2019 года стала LADA Granta – своих покупателей нашли почти 64 тыс. автомобилей этого семейства, что на 40% превышает показатели прошлого года. LADA Vesta заняла вторую строчку рейтинга: за полгода продано более 55 тыс. автомобилей.
История не раз доказывала, что выпуск даже самых удачных автомобилей приходит к концу. Когда-то конвейер остановится и для Vesta, как в свое время для популярной «копейки». Но АВТОВАЗ останавливаться не намерен – до 2026 года завод пообещал запустить в серию восемь новых моделей.
Четыре ноль в вашу пользу > Авто > Новые автомобили Audi 2021-2022
Динамика и эмоции, уверенность и безопасность — всё это полный привод quattro. К талантливым людям приходит озарение. Но то, что гениальные решения рождаются сами собой, — сказка. Случайность, везение или даже озарение на самом деле — синергия различных сил, которые сошлись вместе. В нужном месте и в нужное время. Легендарная сегодня система Audi quattro тоже появилась не вдруг, и 40 лет эволюции знаковой для мирового автопрома технологии — это средоточие энергии прогрессивных менеджеров, высококлассных дизайнеров, бесстрашных гонщиков, умелых инженеров.
В нужном месте и в нужное время. Легендарная сегодня система Audi quattro тоже появилась не вдруг, и 40 лет эволюции знаковой для мирового автопрома технологии — это средоточие энергии прогрессивных менеджеров, высококлассных дизайнеров, бесстрашных гонщиков, умелых инженеров.
ТЕКСТ: Юрий Урюков, «Motor1 Россия» ФОТО: AUDI AG
Утилитарный Volkswagen Iltis разрабатывала команда инженеров Audi. Армейский вездеход подсказал направле- ние мысли, но трансмиссию спортивного купе с приводом quattro сделали куда более прогрессивной. Самое главное — полный привод стал постоянным, а не подключаемым.
Создатели
Краткая история гласит о том, что в феврале 1977 года за столом собрались трое: инженер по шасси Йорг Бензингер, руководитель группы Вальтер Трезер и глава отдела разработок Audi Фердинанд Пиех. Первый, дескать, чуть ли не в шутку предложил поставить полный привод армейского вездехода Volkswagen Iltis на легковой гражданский автомобиль, второй с ходу придумал название quattro, третий волей начальника авантюру санкционировал. А дальше шестеренки амбициозного проекта закрутились как бы сами собой, что через три года привело к сенсации — дебюту серийного купе Audi Quattro на Женевском автосалоне.
А дальше шестеренки амбициозного проекта закрутились как бы сами собой, что через три года привело к сенсации — дебюту серийного купе Audi Quattro на Женевском автосалоне.
В реальности все было куда сложнее. Начнем с того, что Бензингер был отнюдь не витавшим в облаках мечтателем. К моменту прихода в Audi в 1971-м он успел поработать и в Porsche, и в Mercedes-Benz, накопив огромный опыт проектирования и испытаний автомобилей самых разнообразных компоновок — от спортивной среднемоторной до классической заднеприводной. Вот почему Бензингера подключили к очень важному проекту — созданию внедорожника Volkswagen Iltis с трансмиссией 4×4 для бундесвера. И это стало последним элементом мозаики знаний: отныне преимущества и недостатки всех возможных на тот момент типов привода инженер знал не только в теории, но и на личной практике. И он оказался не одним таким профессионалом в команде.
Незадолго до дебюта Audi Quattro его прародитель Volkswagen Iltis под управлением Фредди Коттулински победил в ралли- рейде «Париж — Дакар». Превосходство полного привода закрепили товарищи по команде, финишировавшие на втором и четвертом местах абсолютного зачета.
Превосходство полного привода закрепили товарищи по команде, финишировавшие на втором и четвертом местах абсолютного зачета.
Во время зимних тестов Volkswagen Iltis в снежной Финляндии Бензингер с коллегой Роландом Гумпертом обратили внимание на любопытный факт. На скользкой дороге 75-сильный утилитарный вездеход, которому вообще-то суетиться не полагалось, с легкостью уезжал от более мощного переднеприводного Audi 80. Куда более быстрый по идее седан просто не мог реализовать потенциал двигателя из-за дефицита сцепления с покрытием. Разумеется, педантичные испытатели доложили о своих наблюдениях руководству, подкрепив слова соответствующими техническими аргументами.
Дальновидный Фердинанд Пиех (внук легендарного Фердинанда Порше), возглавивший конструкторский коллектив Audi в 1975 году, усмотрел в новаторском предложении инженеров-испытателей то секретное оружие, которое позволило бы марке разом утереть нос именитым конкурентам. При этом талантливому менеджеру хватило хладнокровия сохранить разработку в тайне даже от собственных боссов, чтобы демонстрацией сырого продукта не подорвать доверие к перспективной технологии.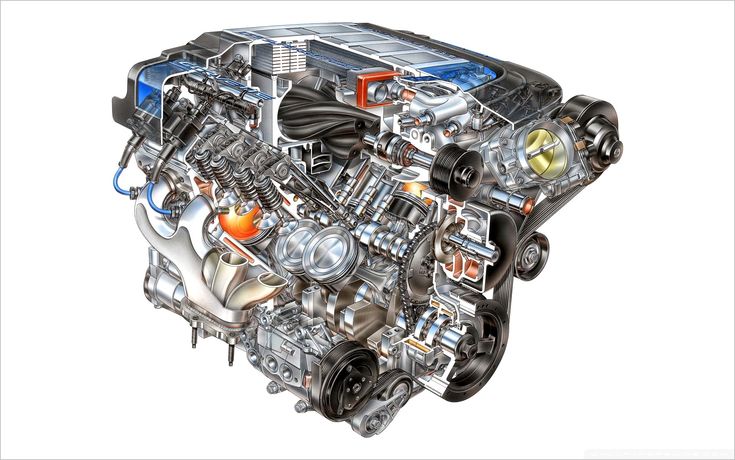
За минувшие сорок лет и привод quattro, и один из его «отцов- основателей» Фердинанд Пиех получили тысячи наград и званий.
Хронология quattro
Создатели предвкушали спортивные успехи привода quattro, поэтому передовая модель Audi изначально задумывалась в кузове Купе.
Первый прототип под кодовым обозначением 262 строили в обстановке строжайшей секретности силами 12 человек команды Вальтера Трезера и буквально из подручных материалов. За основу взяли обычный Audi 80, в том числе и для того, чтобы не привлекать внимание зевак и шпионов при обкатке. А вот в испытания вложились по максимуму. И когда тщательная подготовка была завершена, мудрый Пиех очень грамотно организовал просмотр концепта руководством компании. Топ-менеджеров вывезли на перевал Туррахер Хое в австрийских Альпах и дали попробовать будущий Quattro лишь после того, как моноприводные конкуренты потерпели фиаско в штурме крутого (33%) обледенелого склона. Разумеется, экспериментальный Audi взял препятствие играючи, причем на обычных летних шинах и без цепей противоскольжения.
В том триумфе была немалая заслуга и тех, кто стоял за кадром — у чертежной доски. В их числе гениальный инженер-трансмиссионщик Франц Тенглер, который придумал систему «вал в вале», пропустив привод на передние колеса через полый вторичный вал коробки передач (силовой агрегат на самом первом Quattro стоял продольно). Именно это решение по большому счету сделало возможным применение всех ведущих на легковом автомобиле, кардинально решив проблему лишнего веса, шума и вибраций.
Иными словами, рождение полного привода Audi происходило куда сложнее обычной беседы за обедом. И даже действительно придуманное Трезером звучное обозначение quattro могло остаться разве что в памяти инженера. Ведь отдел маркетинга всерьез планировал продвигать уже готовящуюся к серийному производству машину под именем Carat (это была в том числе сложная аббревиатура). Однако находчивому Вальтеру удалось переубедить коллег из штаб-квартиры, продемонстрировав им… флакон дешевой туалетной воды с таким же названием. Больше к этому вопросу не возвращались. Достойный автомобиль и название заслужил достойное.
Больше к этому вопросу не возвращались. Достойный автомобиль и название заслужил достойное.
Гонщики
Совсем не факт, что мы бы сегодня отмечали юбилей quattro, если бы опыт инженеров и талант менеджеров не помножились на еще один фактор, казалось бы, отвлеченный и малозначимый. В 1979 году, когда предсерийные прототипы будущего Quattro уже вовсю наматывали километры по полигону, на трассы мирового чемпионата по ралли допустили полноприводные автомобили. И… поначалу ничего не изменилось: ведущие команды полагали, что игра не стоит свеч. Мол, трансмиссия 4×4 слишком утяжелит и усложнит «боевую» технику, да и для легализации гоночной машины пришлось бы выпустить дорожную серию для свободной продажи. Но в уже сформированном заводском коллективе Audi под руководством упомянутого выше Вальтера Трезера считали иначе. Первый же пробный выезд Quattro стал тихой сенсацией. На ралли Алгарве в Португалии финский пилот Ханну Миккола привел судейский «нулевой» автомобиль к финишу, виртуально выиграв 24 из 30 спецучастков. По меркам чемпионата мира это был бы тотальный разгром, учиненный вдобавок на по сути опытной машине. Однако конкуренты не услышали ни этот, ни следующий тревожные для них звоночки, когда Quattro легко выиграл дебютную гонку в Австрии уже в основном зачете — и тоже с огромным преимуществом. Расплата за наивность пришла в первом полноценном для заводской команды Audi сезоне чемпионата мира — 1981. Именно тогда спортивный коллектив марки возглавил Роланд Гумперт, тоже участник тех самых исторических тестов Volkswagen Iltis, в ходе которых родилась идея quattro.
В 1984 году на раллийные трассы вышел Audi Sport quattro — по сути совершенно новый гоночный автомобиль с композитным кузовом и укороченной колесной базой. Аналогичная модель повышенной мощности пополнила и «гражданскую» линейку. Различные вариации Audi Quattro записали на свой счет 23 победы на этапах чемпионата мира по ралли. И понеслось. Ханну Миккола побеждает на сложнейших этапах в Швеции и Великобритании. Ралли Сан-Ремо впервые в истории мирового ралли выигрывает полностью женский экипаж Мишель Мутон — Фабриция Понс. До сих пор это достижение девушек на Audi Quattro остается непревзойденным. О преимуществах полного привода заговорили все, но это было только начало триумфа. В 1982 году Audi кладет конкурентов на лопатки в категории автопроизводителей. В 1983-м Ханну Миккола становится чемпионом мира по ралли. А годом спустя Quattro делает дубль — берет золото и в командном зачете, и в личном. На этот раз отличился не менее легендарный гонщик из Швеции Стиг Бломквист.
До сих пор это достижение девушек на Audi Quattro остается непревзойденным. О преимуществах полного привода заговорили все, но это было только начало триумфа. В 1982 году Audi кладет конкурентов на лопатки в категории автопроизводителей. В 1983-м Ханну Миккола становится чемпионом мира по ралли. А годом спустя Quattro делает дубль — берет золото и в командном зачете, и в личном. На этот раз отличился не менее легендарный гонщик из Швеции Стиг Бломквист.
Двукратный чемпион мира по ралли Вальтер Рёрль выиграл свою последнюю гонку в WRC за рулем Audi Sport quattro S1, а спустя два года — в 1987-м — установил на специально подготовленном варианте этого автомобиля рекорд трассы «Пайкс-Пик».
Завершив карьеру в ралли, полный привод quattro вскоре доказал превосходство технологий Audi и в кольцевых гонках.
Иными словами, Quattro стал символом 80-х, в том числе культовой раллийной эпохи — эпохи так называемой «Группы Б» для самых отчаянных пилотов и запредельно быстрых машин. Но когда «гонка вооружений» среди команд-лидеров привела к росту мощности моторов до полутысячи лошадиных сил и выше, организаторы сочли за благо отменить зачет. Как говорится, на всякий случай, поскольку жесткие аварии не заставили себя ждать… Однако легенда Quattro продолжила жить на других трассах, ведь полный привод для того и затевался, чтобы доминировать на самых разных сложных покрытиях. В 1987 году Вальтер Рёрль за рулем 600-сильного Audi quattro S1 ставит рекорд «Гонки в облака» — культового соревнования по подъему на холм Пайкс-Пик. Причем для марки это был уже третий подряд успех в Колорадо. Затем технология quattro меняет расстановку сил в различных кольцевых чемпионатах, демонстрируя возможности полного привода на асфальте. В 1988-м победный дубль оформлен в американском первенстве TransAM, год спустя Ханс-Йоахим Штук добивается семи побед в чемпионате IMSA GTO, а в 1990–1991 годах этот пилот на пару с Франком Биелой доминирует на этапах DTM. 1996-й — апофеоз успехов десятилетия.
Но когда «гонка вооружений» среди команд-лидеров привела к росту мощности моторов до полутысячи лошадиных сил и выше, организаторы сочли за благо отменить зачет. Как говорится, на всякий случай, поскольку жесткие аварии не заставили себя ждать… Однако легенда Quattro продолжила жить на других трассах, ведь полный привод для того и затевался, чтобы доминировать на самых разных сложных покрытиях. В 1987 году Вальтер Рёрль за рулем 600-сильного Audi quattro S1 ставит рекорд «Гонки в облака» — культового соревнования по подъему на холм Пайкс-Пик. Причем для марки это был уже третий подряд успех в Колорадо. Затем технология quattro меняет расстановку сил в различных кольцевых чемпионатах, демонстрируя возможности полного привода на асфальте. В 1988-м победный дубль оформлен в американском первенстве TransAM, год спустя Ханс-Йоахим Штук добивается семи побед в чемпионате IMSA GTO, а в 1990–1991 годах этот пилот на пару с Франком Биелой доминирует на этапах DTM. 1996-й — апофеоз успехов десятилетия. Audi A4 quattro Supertouring побеждает в кузовных чемпионатах Германии, Великобритании, Италии, Бельгии, Испании, Австралии и ЮАР. А вот 2000-е проходят под знаком «24 часов Ле-Мана»: заводская команда 13 (!) раз становится первой в самой жесткой гонке на выносливость, причем три победы принес Audi R18 e-tron quattro. Не осталась без внимания quattro и молодая, но очень зрелищная дисциплина. В 2016-м Маттиас Экстрём не оставляет соперникам шансов в чемпионате мира по ралли-кроссу, при этом его Audi S1 заслуженно получает титул самой быстрой машины сезона и выигрывает командный зачет.
Audi A4 quattro Supertouring побеждает в кузовных чемпионатах Германии, Великобритании, Италии, Бельгии, Испании, Австралии и ЮАР. А вот 2000-е проходят под знаком «24 часов Ле-Мана»: заводская команда 13 (!) раз становится первой в самой жесткой гонке на выносливость, причем три победы принес Audi R18 e-tron quattro. Не осталась без внимания quattro и молодая, но очень зрелищная дисциплина. В 2016-м Маттиас Экстрём не оставляет соперникам шансов в чемпионате мира по ралли-кроссу, при этом его Audi S1 заслуженно получает титул самой быстрой машины сезона и выигрывает командный зачет.
13 раз заводская команда Audi выигрывала культовые «24 часа Ле-Мана». Три победы принес R18 e-tron quattro.
Автомобили
Модель Audi Quattro и полный привод Audi, получивший название quattro, — не одно и то же. 3 марта 1980 года стильное купе Audi Quattro с постоянным полным приводом, пятицилиндровым турбомотором мощностью 200 л. с. и разгоном до сотни за 7,1 с открыло новую эру на автомобильном салоне в Женеве. За что и получило со временем почетное обозначение Urquattro (от немецкого «изначальный», «первый в своем роде»). На протяжении 11 лет эта модель оставалась мечтой едва ли не всех любителей скорости, да и сегодня за легендой Audi, особенно в омологационном 306-сильном исполнении Sport quattro, гоняются коллекционеры. Но куда важнее другое: первый автомобиль не стал последним. Эффективная технология quattro (ее пишут с маленькой буквы) начала стремительно распространяться по модельному ряду марки, со временем подарив миру еще немало ярких разработок. Причем огромную роль в успехе сыграл тот факт, что следом за спорткаром постоянный полный привод передали буквально в народ, сделав инновацию доступной широкому кругу покупателей. Уже в 1982 году выходит Audi 80 quattro — первый крупносерийный легковой автомобиль со всеми ведущими колесами. Опыт огромного числа рядовых пользователей указал инженерам верный вектор дальнейшего развития quattro. В 1986 году дебютирует второе поколение полного привода Audi.
За что и получило со временем почетное обозначение Urquattro (от немецкого «изначальный», «первый в своем роде»). На протяжении 11 лет эта модель оставалась мечтой едва ли не всех любителей скорости, да и сегодня за легендой Audi, особенно в омологационном 306-сильном исполнении Sport quattro, гоняются коллекционеры. Но куда важнее другое: первый автомобиль не стал последним. Эффективная технология quattro (ее пишут с маленькой буквы) начала стремительно распространяться по модельному ряду марки, со временем подарив миру еще немало ярких разработок. Причем огромную роль в успехе сыграл тот факт, что следом за спорткаром постоянный полный привод передали буквально в народ, сделав инновацию доступной широкому кругу покупателей. Уже в 1982 году выходит Audi 80 quattro — первый крупносерийный легковой автомобиль со всеми ведущими колесами. Опыт огромного числа рядовых пользователей указал инженерам верный вектор дальнейшего развития quattro. В 1986 году дебютирует второе поколение полного привода Audi. Принципиальное новшество состояло в появлении межосевого самоблокирующегося дифференциала Torsen. Подробно о нем расскажем ниже, а пока отметим главное. Этому устройству не нужны хитрая электроника и внимание водителя, ведь крутящий момент распределяется автоматически. Чистая механика, пусть и похожая немного на магию. И снова на руку технологии сыграла наглядная демонстрация превосходства. Серийный Audi 100 CS quattro под управлением раллиста Харальда Демута покорил 80-процентный подъем лыжного трамплина в финском местечке Кайпола. Скользкий уклон в 37,5 градуса… В то время другой дорожный автомобиль едва ли смог бы повторить подобное. Рекламный ролик об этом врезался в память целого поколения.
Принципиальное новшество состояло в появлении межосевого самоблокирующегося дифференциала Torsen. Подробно о нем расскажем ниже, а пока отметим главное. Этому устройству не нужны хитрая электроника и внимание водителя, ведь крутящий момент распределяется автоматически. Чистая механика, пусть и похожая немного на магию. И снова на руку технологии сыграла наглядная демонстрация превосходства. Серийный Audi 100 CS quattro под управлением раллиста Харальда Демута покорил 80-процентный подъем лыжного трамплина в финском местечке Кайпола. Скользкий уклон в 37,5 градуса… В то время другой дорожный автомобиль едва ли смог бы повторить подобное. Рекламный ролик об этом врезался в память целого поколения.
За пару лет полный привод quattro перешел со спортивной модели на массовые автомобили Audi, закрепив преимущество марки над конкурентами.
В 1988 году на Парижском салоне дебютирует роскошный представительский седан Audi V8. Прорыв заключался в том, что впервые постоянный полный привод quattro научили работать с автоматической коробкой передач и могучим восьмицилиндровым двигателем.
Умение инженеров Audi укрощать мощность на серийных моделях, с одной стороны, и громкие успехи в гонках — с другой, привели к рождению первого представителя спортивной S-серии. В 1991-м на рынок вышел Audi S2 с 220-сильным двигателем и, разумеется, полным приводом. А спустя еще три года мир удивил Audi RS 2 quattro, который стал воплощением девиза «Невозможное возможно». Как оказалось, динамика 315-сильного суперкара вполне удачно комбинируется с практичным универсальным кузовом.
Отчасти RS 2 quattro предвосхитил успех кроссоверов в самом широком понимании этого термина: автомобили на стыке жанров, синергия подчас противоречивых умений — постоянный полный привод отлично вписывался в смелую концепцию. В 2000 году на Женевском автосалоне дебютирует еще одна модель, которая заставила экспертов изрядно поломать голову над классификацией. Универсал Allroad quattro в защитном обвесе и с регулируемым посредством пневматической подвески клиренсом вне асфальта не уступал в проходимости внедорожникам, а на трассе легко обгонял неповоротливые вездеходы за счет мощных двигателей и точного шасси.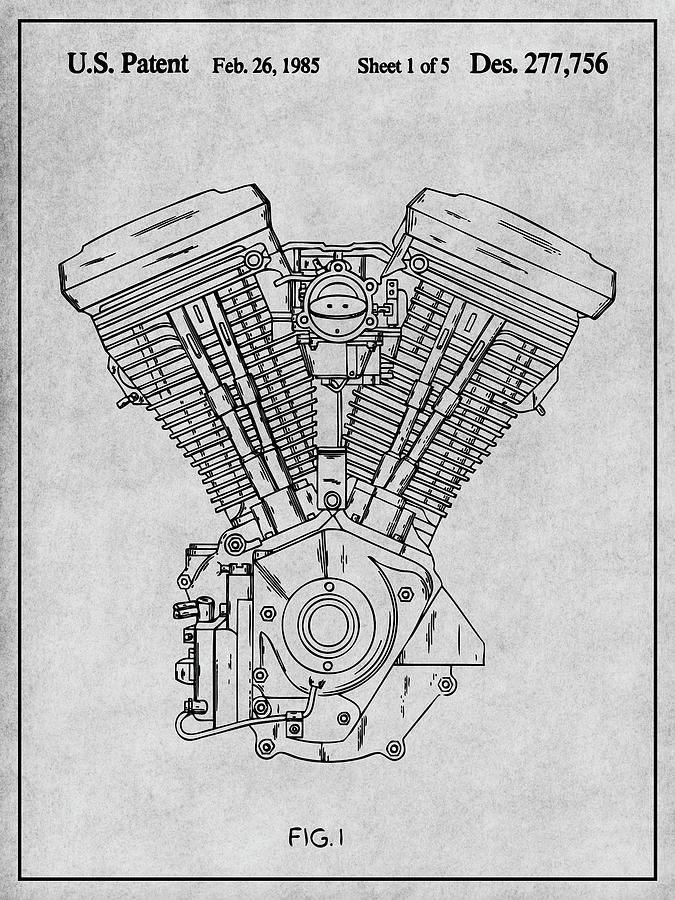
С этих моделей началась история знаменитых спортивных серий Audi. Купе S2 (красный автомобиль) представили в 1991-м, а суперкар RS 2 Avant — в 1994-м.
В 2005 году начались продажи первого в истории Audi роскошного SUV. Модель Q7 с тех пор стала ориентиром в своем классе, объединив в себе комфорт и динамику представительского седана с возможностями внедорожника. Но при этом с 1999 года постоянный полный привод стал доступен и на самых компактных моделях марки с поперечно расположенным мотором — А3 и ТТ.
Широчайший ассортимент — одна из причин того, что за 40 лет покупателей нашли свыше 10,5 млн автомобилей с технологией quattro. И сегодня линейка Audi предлагает более 150 модификаций со всеми ведущими колесами, включая передовые электромобили линейки e-tron с оригинальной полноприводной трансмиссией на основе электрических двигателей.
За 40 Лет Audi выпустила свыше 10,5 млн автомобилей с полным приводом quattro.
Дизайнеры
«Придумай что-нибудь для трансформации идеи первого в мире полноприводного спорткара в визуальную форму». Таково было дебютное задание для молодого британца Мартина Смита после его прихода в Audi. Учитывая важность проекта, слова Фердинанда Пиеха следовало понимать примерно как ультиматум: пан или пропал. Вдобавок творческую свободу дизайнера сильно ограничивали технологические требования. К тому моменту кузов «донорского» купе Audi 80 (нарисованного, к слову, маэстро Джорджетто Джуджаро) почти подготовили к выпуску, и менять конструктив было поздно. «На раскачку времени не оставалось. О чем Пиех мечтал в выходные, команда Audi начинала делать в понедельник», — вспоминал Мартин. Тем не менее Смиту удалось на основе принятой к производству силовой структуры создать действительно самобытный облик, который сам по себе стал легендой наравне с техническими инновациями Urquattro.
Таково было дебютное задание для молодого британца Мартина Смита после его прихода в Audi. Учитывая важность проекта, слова Фердинанда Пиеха следовало понимать примерно как ультиматум: пан или пропал. Вдобавок творческую свободу дизайнера сильно ограничивали технологические требования. К тому моменту кузов «донорского» купе Audi 80 (нарисованного, к слову, маэстро Джорджетто Джуджаро) почти подготовили к выпуску, и менять конструктив было поздно. «На раскачку времени не оставалось. О чем Пиех мечтал в выходные, команда Audi начинала делать в понедельник», — вспоминал Мартин. Тем не менее Смиту удалось на основе принятой к производству силовой структуры создать действительно самобытный облик, который сам по себе стал легендой наравне с техническими инновациями Urquattro.
Серьезные возможности quattro вдохновляли дизайнеров на смелые эксперименты в облике автомобилей Audi.
Этот успех скептики могли бы назвать случайным, но в 1991 году посетители Токийского мотор-шоу увидели еще одно наглядное подтверждение таланта Смита. В соавторстве с американцем Джеем Мэйсом Мартин создал потрясающий Avus quattro — один из самых эффектных в истории Audi концепт-каров. Стремительный суперкар соединил в себе дух исторических гоночных болидов Auto Union 1930-х годов и передовые инженерные решения вроде мотора W12 или полностью алюминиевого кузова. Причем технология Audi Space Frame (прочная пространственная структура) уже через три года пошла в серию на представительском седане A8.
В соавторстве с американцем Джеем Мэйсом Мартин создал потрясающий Avus quattro — один из самых эффектных в истории Audi концепт-каров. Стремительный суперкар соединил в себе дух исторических гоночных болидов Auto Union 1930-х годов и передовые инженерные решения вроде мотора W12 или полностью алюминиевого кузова. Причем технология Audi Space Frame (прочная пространственная структура) уже через три года пошла в серию на представительском седане A8.
Audi TT первого поколения не только примерил новый тип quattro, но и стал признанным шедевром автомобильного дизайна двухтысячных годов.
Незадолго до Avus quattro дебютировал и другой интересный прототип. Соавтором смелого стиля среднемоторного Quattro Spyder выступил Петер Шрайер, человек, который пришел в компанию еще студентом в далеком 1978-м. Неудивительно, что за долгую карьеру художник сполна проникся ценностями бренда, это помогло в скором будущем при создании таких знаковых моделей, как Audi A2, A3, A6, A8, TT первого поколения. Причем облик спорткара TT специализированное издание Car Design News в 2006-м назвало одним из самых значительных достижений современного дизайна. В 2005 году шеф-дизайнером Audi становится на тот момент уже знаменитый итальянец Вальтер де Сильва. Именно он приложил перо к портрету совершенно разных по назначению серийных автомобилей, объединяли которых две вещи: полный привод quattro и ключевое место в истории компании. Это внедорожник Q7, купе A5 и среднемоторный суперкар R8. Urquattro и технология quattro в 2010 году отмечали 30-летие. Неожиданным, но приятным подарком фанатам марки стал представленный на автосалоне в Париже прототип quattro concept, созданный под руководством нового главы центра стиля Audi Вольфганга Эггера. В концепт-каре настолько органично переплелись исторические мотивы и прогрессивная мода, что автомобиль едва не пошел в мелкосерийное производство.
Причем облик спорткара TT специализированное издание Car Design News в 2006-м назвало одним из самых значительных достижений современного дизайна. В 2005 году шеф-дизайнером Audi становится на тот момент уже знаменитый итальянец Вальтер де Сильва. Именно он приложил перо к портрету совершенно разных по назначению серийных автомобилей, объединяли которых две вещи: полный привод quattro и ключевое место в истории компании. Это внедорожник Q7, купе A5 и среднемоторный суперкар R8. Urquattro и технология quattro в 2010 году отмечали 30-летие. Неожиданным, но приятным подарком фанатам марки стал представленный на автосалоне в Париже прототип quattro concept, созданный под руководством нового главы центра стиля Audi Вольфганга Эггера. В концепт-каре настолько органично переплелись исторические мотивы и прогрессивная мода, что автомобиль едва не пошел в мелкосерийное производство.
На 30-летие Urquattro дизайнеры Audi удачно переосмыслили облик легендарного купе.
Марк Лихте занял пост руководителя Audi Design в 2014-м. На его долю выпала важнейшая миссия: соединить наследие марки с завтрашним днем — прогрессивными электрическими технологиями. И сначала концепт 2015 года, а затем и серийный вариант e-tron quattro успешно выполнили задачу. Разумеется, любой из этих одаренных художников имел собственное видение и неповторимый стиль, но объединяло первоклассных мастеров главное — страсть к творчеству при четком фокусе на конечный результат. Вот почему каждый из автомобилей quattro получал цельный, запоминающийся образ, подчас опережавший свою эпоху.
На его долю выпала важнейшая миссия: соединить наследие марки с завтрашним днем — прогрессивными электрическими технологиями. И сначала концепт 2015 года, а затем и серийный вариант e-tron quattro успешно выполнили задачу. Разумеется, любой из этих одаренных художников имел собственное видение и неповторимый стиль, но объединяло первоклассных мастеров главное — страсть к творчеству при четком фокусе на конечный результат. Вот почему каждый из автомобилей quattro получал цельный, запоминающийся образ, подчас опережавший свою эпоху.
Технологии
Постоянный полный привод с возможностью принудительной блокировки межосевого и заднего межколесного дифференциалов — так описывал первый вариант quattro инженерный язык. Не слишком просто, правда? Вот и от водителя тогда требовались определенные умения, чтобы эффективно реализовывать все преимущества передовой трансмиссии. И ладно гонщики, им по долгу службы положено знать, как, когда и на что нажимать, за какие рычаги дергать. Обычным потребителям было сложнее освоиться, а поскольку Audi разрабатывала quattro прежде всего для широкой аудитории, то уже в 1986-м появилось второе, улучшенное поколение фирменного полного привода. Говорят, Йорг Бензингер задумывал применить так называемый дифференциал повышенного трения еще во время испытаний первых прототипов. Но на отработку конструктивных нюансов потребовалось время. Зато в итоге покупатели Audi получили систему, принцип которой предельно прост и действует до сих пор: выбирай курс, остальное автомобиль сделает сам. Иными словами, с тех пор крутящий момент распределялся по колесам автоматически, без участия человека. Отвечало за это хитрое устройство под названием Torsen (от английского torque sensing — чувствительный к моменту). Особенность такого червячного межосевого дифференциала в том, что сложная электроника ему не нужна, блокировка срабатывала полностью механически, едва хотя бы одна покрышка начинала пробуксовывать. Именно поэтому узел подобного типа также называют самоблокирующимся. В зависимости от состояния дороги на каждую из осей quattro второго поколения мог подать до 75% тяги.
Говорят, Йорг Бензингер задумывал применить так называемый дифференциал повышенного трения еще во время испытаний первых прототипов. Но на отработку конструктивных нюансов потребовалось время. Зато в итоге покупатели Audi получили систему, принцип которой предельно прост и действует до сих пор: выбирай курс, остальное автомобиль сделает сам. Иными словами, с тех пор крутящий момент распределялся по колесам автоматически, без участия человека. Отвечало за это хитрое устройство под названием Torsen (от английского torque sensing — чувствительный к моменту). Особенность такого червячного межосевого дифференциала в том, что сложная электроника ему не нужна, блокировка срабатывала полностью механически, едва хотя бы одна покрышка начинала пробуксовывать. Именно поэтому узел подобного типа также называют самоблокирующимся. В зависимости от состояния дороги на каждую из осей quattro второго поколения мог подать до 75% тяги.
Межосевой самоблокирующийся дифференциал Torsen работает полностью автоматически, помощь электроники ему не нужна. С годами дифференциал тоже совершенствовался: менялись конструктивные нюансы, характеристики и так далее. Но главное оставалось неизменным: система реагировала на сложное покрытие моментально, плавно и точно вне зависимости от того, кто сидит за рулем. Новичок получал стабильность и безопасность, профессионал — поистине широчайшие возможности для удовлетворения водительских амбиций. И со временем умения quattro становились все шире. Стремительное развитие автомобильной электроники привело к тому, что в 1994-м Torsen получил союзника в лице системы EDS, реализующей программным образом преимущества блокировок межколесных дифференциалов. А спустя еще три года полный привод интегрировали в обширную сферу ответственности ESC — системы поддержания курсовой устойчивости. Так автомобили Audi стали еще стабильнее, еще быстрее, еще безопаснее.
Сегодня quattro — не просто полный привод, а очень сложная система: комбинация электронных и механических компонентов.
Неудивительно, что в ответ на запросы рынка полный привод quattro к рубежу тысячелетия распространился практически на весь модельный ряд Audi.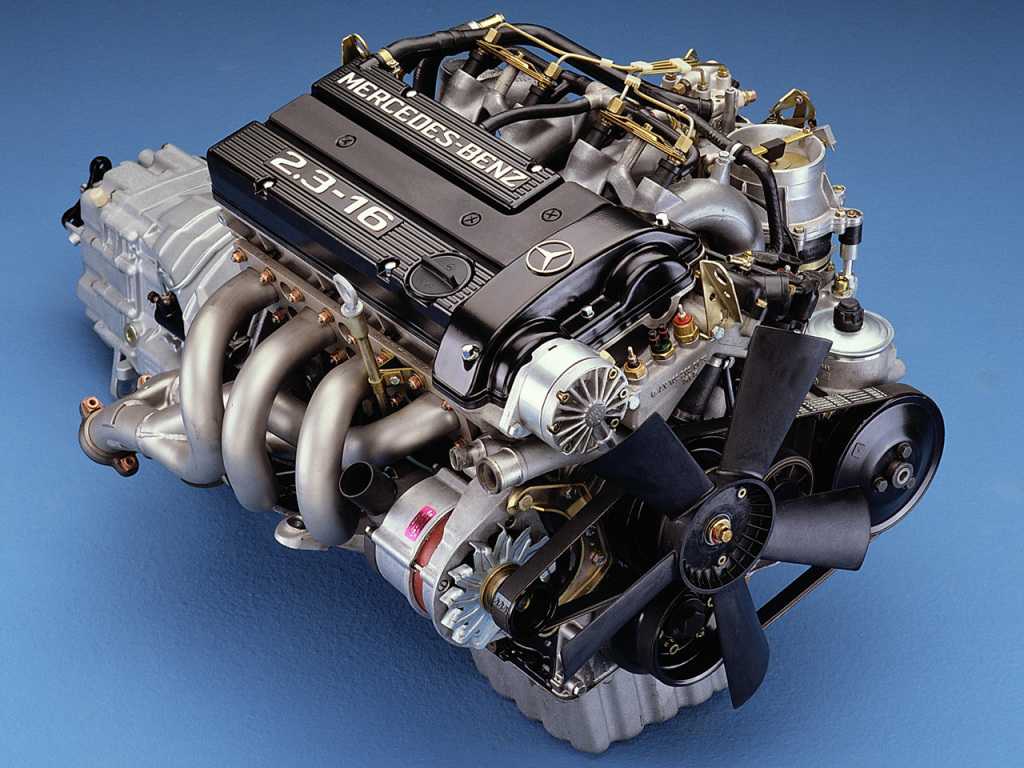 Все ведущие колеса комбинировали с бензиновыми и дизельными моторами, механическими и автоматическими коробками передач, разными кузовами и моделями порой полярного назначения: от могучих спорткаров до компактных городских автомобилей. Специально для таких машин с поперечно расположенным мотором марка разработала особый вариант quattro с многодисковой фрикционной муфтой, способной плавно дозировать тягу на задних колесах. При этом на среднемоторном суперкаре Audi R8 второго поколения аналогичное устройство использовали, наоборот, для регулирования степени участия в движении передней оси. С тех пор обе разновидности quattro развивались параллельно, пока в 2010 году инженеры не изобрели для замены заслуженного «Торсена» альтернативный узел. Устройство с так называемыми коронными шестернями работало по схожему принципу, распределяло крутящий момент не менее эффективно, но при этом отличалось сокращенной массой и размерами. И чтобы у фанатов quattro не оставалось сомнений в правильности перемен, дебютировал новый самоблокирующийся дифференциал на очень серьезном автомобиле — 450-сильном купе Audi RS 5.
Все ведущие колеса комбинировали с бензиновыми и дизельными моторами, механическими и автоматическими коробками передач, разными кузовами и моделями порой полярного назначения: от могучих спорткаров до компактных городских автомобилей. Специально для таких машин с поперечно расположенным мотором марка разработала особый вариант quattro с многодисковой фрикционной муфтой, способной плавно дозировать тягу на задних колесах. При этом на среднемоторном суперкаре Audi R8 второго поколения аналогичное устройство использовали, наоборот, для регулирования степени участия в движении передней оси. С тех пор обе разновидности quattro развивались параллельно, пока в 2010 году инженеры не изобрели для замены заслуженного «Торсена» альтернативный узел. Устройство с так называемыми коронными шестернями работало по схожему принципу, распределяло крутящий момент не менее эффективно, но при этом отличалось сокращенной массой и размерами. И чтобы у фанатов quattro не оставалось сомнений в правильности перемен, дебютировал новый самоблокирующийся дифференциал на очень серьезном автомобиле — 450-сильном купе Audi RS 5.
Оцените, насколько плотная компоновка у задней подвески Audi Q5 — каждый миллиметр на счету. И компактные узлы quattro ultra отлично вписываются в эту схему, экономя не только место, но и массу. А значит, и снижая расход топлива.
Очередной виток прогресса пришелся на 2016 год, когда был представлен интеллектуальный полный привод quattro ultra. Революционная концепция системы стала ответом на все более строгие требования по части экономичности и экологичности автомобилей. При этом инженерам Audi удалось решить новые задачи без ущерба для классических ценностей. О quattro ultra мы рассказывали не раз, но все же напомним, что система большую часть времени обеспечивает движение на переднем приводе. При этом электроника каждые 10 миллисекунд оценивает обстановку, опрашивает десятки датчиков, реагируя на изменение внешних условий подчас превентивно. Водитель ничего не почувствовал, но трансмиссия уже перешла в полноприводный режим — за моментальное подключение задних колес отвечают две специальные муфты.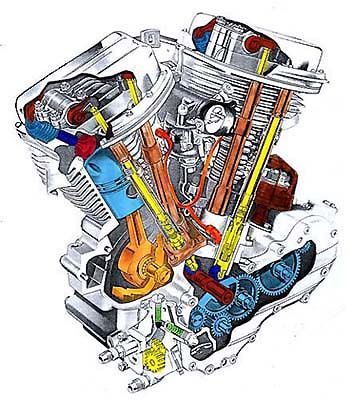
И даже на этом итоги 40-летней эволюции quattro подводить рано. Сейчас к дебюту на российском рынке готовится полностью электрический внедорожник Audi e-tron, на котором полный привод реализован принципиально иначе: посредством уникальных технологий, опробованных на гибридных спортивных прототипах Audi R18 e-tron quattro,
трижды подряд выигрывавших культовую гонку на выносливость «24 часа Ле-Мана». Причем именно за рулем такого автомобиля одержал рекордную победу «мистер Ле-Ман» датчанин Том Кристенсен, который поднимался на высшую ступень пьедестала в общей сложности девять раз. А доверие гонщика такого уровня — лучшая рекомендация инновационным разработкам Audi.
Впрочем, одно мнение хорошо, а два лучше. Шведскому пилоту, чемпиону мира по ралли-кроссу и двукратному победителю серии DTM Маттиасу Экстрёму тоже не впервой подниматься на вершину гоночного олимпа, но даже он впечатлился собственным успехом, когда на Audi e-tron quattro покорил 85-процентный склон горнолыжной трассы в австрийском Китцбюэле. Тем самым доказав: пусть технологии стремительно развиваются, в основных принципах quattro компромиссы невозможны. Ни 40 лет назад, ни сегодня.
Тем самым доказав: пусть технологии стремительно развиваются, в основных принципах quattro компромиссы невозможны. Ни 40 лет назад, ни сегодня.
Являются ли мутации частью «двигателя» эволюции?
Давайте рассмотрим мутации более подробно и посмотрим, предоставляют ли они информацию, необходимую для поддержки эволюции от прудовой нечисти к человеку, или же они подтверждают Слово Бога в Книге Бытия.
Эта глава, адаптированная из книги «Война мировоззрений », была любезно предоставлена «Ответам в Бытии» на безвозмездной основе издательством Master Books, подразделением New Leaf Press (Грин Форест, Арканзас).
В эволюционной модели мутации приветствуются как доминирующий механизм.
для эволюции от прудовой нечисти к человеку и предоставить «доказательство» того, что Библия
история о сотворении неверна. Но должны ли мы доверять идеям несовершенных,
ошибаться людей о том, как мы появились, или мы должны верить
рассказ о совершенном Боге, который был свидетелем Его творения? Давайте смотреть
на мутациях более подробно и посмотреть, предоставляют ли они необходимую информацию
поддерживать эволюцию от прудовой нечисти к людям, или если они подтверждают Слово Божье
в Книге Бытия.
Мутации — это прежде всего необратимые изменения в цепи ДНК.
Мутации — это прежде всего необратимые изменения в цепи ДНК. ДНК
(дезоксирибонуклеиновая кислота) является единицей хранения информации для всех организмов,
включая людей, кошек и собак. ДНК человека состоит примерно из трех
миллиардов пар оснований. ДНК состоит из двух нитей и образует двойную спираль.
При половом размножении один набор хромосом (большие сегменты ДНК)
происходит от матери и один набор от отца. При бесполом размножении,
ДНК копируется целиком, а затем передается при разделении организма.
Двойная спираль состоит из четырех типов азотистых оснований, называемых нуклеотидов .
Этими типами являются гуанин, цитозин, аденин и тимин. Они представлены
буквами G, C, A и T. Каждая из этих пар оснований, или «букв»,
часть кода, в которой хранится информация о цвете волос, росте, разрезе глаз и т. д.
основания спариваются следующим образом: аденин к тимину и гуанин к цитозину.
| А •- | Н -• | 0 —— |
| Б -••• | О— | 1 •—- |
| С -•-• | П •—• | 2 ••— |
| Д -•• | В —•- | 3 •••— |
| Э • | Р •-• | 4 ••••- |
| Ф ••-• | С ••• | 5 ••••• |
| ГРАММ —• | Т- | 6 -•••• |
| Н •••• | У ••- | 7 —••• |
| я •• | В •••- | 8 —•• |
| J •— | Вт•— | 9 —-• |
| К -•- | ИКС -••- | Полная остановка •-•-•- |
| Л •-•• | Y -•— | Запятая —••— |
| М — | Z —•• | Запрос ••—•• |
Думайте об этом как о азбуке Морзе. Азбука Морзе — это система, в которой буквы
Азбука Морзе — это система, в которой буквы
изображается тире и точками (если слышно, то это долгий звук, а короткий
звук). Когда вы комбинируете разные точки и тире, вы можете составлять буквы по буквам.
и слова. Вот копия азбуки Морзе:
Если кто-то хотел позвать на помощь, например, с помощью азбуки Морзе, он
или она пошлет буквы SOS (международный сигнал бедствия).
Азбукой Морзе для SOS является:
S — это точек точка точка [• • •] или три коротких звука.
O – это тире тире [– – –] или три длинных звука.
S — это точек точка точка [• • •] или три коротких звука.
Следовательно, это будет [• • • – – – • • •], или три коротких звука, следующих за
три долгих звука, за которыми следуют три коротких звука.
Мутация подобна замене точки на тире в азбуке Морзе. Если мы
попытался написать SOS азбукой Морзе, но заменил первую точку на тире,
случайно прочитал:
[– • • – – – • • •]
Штрих-точка — это последовательность D, а не S; так что теперь это будет читать:
Д [– • •]
О [– – –]
С [• • •]
Итак, из-за ошибки (мутации) мы теперь читаем DOS, а не
SOS. Если ты отправишь это, никто не подумает, что тебе нужна помощь. Эта мутация
Если ты отправишь это, никто не подумает, что тебе нужна помощь. Эта мутация
был значительным, потому что он сделал две вещи с вашим сообщением:
- Исходное слово потеряно.
- Намерение/смысл был потерян.
Цепь ДНК похожа на азбуку Морзе, но намного сложнее.
код. Он использует четыре буквы (G, A, T, C) вместо тире и точек, чтобы сделать
слова и фразы. И, как азбука Морзе, мутации могут влиять на ДНК.
пряди и вызывают проблемы для организма. Эти ошибки ДНК называются
генетических мутаций.
две вещи:
- Потеря информации1
- Получение новой информации
Практически все наблюдаемые мутации относятся к категории потери информации .
Это отличается от потери или усиления функции . Некоторые мутации могут вызывать
организм теряет генетическую информацию, но при этом приобретает какую-то функцию. Этот
Этот
редко, но бывало. Эти типы мутаций имеют положительный результат.
Например, если жук теряет информацию, чтобы сделать крыло в ветреную погоду.
остров, мутация выгодна, потому что жук не уносится ветром
море и убит. Генетически мутация вызывала потерю информации, но была
полезно для жука. Таким образом, это был положительный результат.
Помимо мутаций, вызывающих потерю информации, теоретически могут
быть мутациями, вызывающими получение новой информации . Есть только несколько предполагаемых
случаев таких мутаций. Однако, если мутировавшая цепь ДНК была построена
с группой пар оснований, которые ничего не делают, эта цепь не будет
полезный. Следовательно, чтобы быть полезной для организма, мутация, имеющая усиление
новая информация также должна вызывать появление новой функции.
Типы генетических мутаций
Нить ДНК содержит инструкции о том, как производить белки. Каждый
трехбуквенный код конкретной аминокислоты, такой как TGC, ATC, GAT, TAG,
и СТС. Многие аминокислоты вместе составляют белок. Для простоты
Многие аминокислоты вместе составляют белок. Для простоты
ради, чтобы проиллюстрировать понятия с нитью ДНК, мы будем использовать примеры в
Английский. Вот фрагмент, иллюстрирующий ДНК трехбуквенными словами:
Машина была красная. У красной машины был один ключ.
Ключ имеет одно ушко и один наконечник.
Точечные мутации
Точечные мутации — это мутации, при которых в ДНК меняется одна буква.
последовательность. Точечная мутация в нашем примере могла вызвать «автомобиль» во втором
предложение читать «кошка»:
Машина была красная. Красный ca t имел один ключ.
Ключ имеет одно ушко и один наконечник.
С этой точечной мутацией мы потеряли информацию для одного слова (автомобиль).
а также изменил смысл предложения. Мы набрали одно слово (кошка),
но мы потеряли одно слово (автомобиль) и потеряли смысл одной фразы. Итак, в целом
результатом стала потеря информации.
Но во многих случаях точечные мутации не приводят к появлению другого слова. Брать
например, еще одна точечная мутация, которая меняет «машину» не на «кошку», а на
«каа»:
Машина была красная. Красный ca a имел один ключ.
Ключ имеет одно ушко и один наконечник.
С этой точечной мутацией мы потеряли информацию для одного слова (автомобиль) как
ну и смысл. Мы не приобрели новых слов, и мы потеряли одно слово
и потерял смысл одной фразы. Итак, еще раз, общий результат этого пункта
мутация была потерей информации, но на этот раз тем более.
Точечные мутации могут быть очень разрушительными. Есть детская болезнь
называется синдромом прогерии Хатчинсона-Гилфорда (HGPS) или просто прогерией.
Недавно он был связан с одной точечной мутацией. Это мутация, которая
вызывает старение кожи детей, облысение головы в очень раннем возрасте (детский сад),
их кости, чтобы развить проблемы, обычно связанные с
пожилого возраста, а размер их тела остается очень коротким (примерно от половины до двух третей
нормального роста). Части их тела, включая органы, быстро стареют, что
Части их тела, включая органы, быстро стареют, что
обычно вызывает смерть в среднем возрасте 13 лет.2
Не все точечные мутации столь разрушительны, но все равно приводят к потерям.
информации. По словам биофизика Ли Спетнера, «все точечные мутации
которые были изучены на молекулярном уровне, оказываются снижающими генетическую
информации, а не увеличивать ее»3.
Инверсионные мутации
Инверсионная мутация — это сегмент ДНК в определенной цепи, который реверсирует сам себя. Инверсионная мутация была бы похожа на второе предложение
нашего примера и записать его в обратном порядке:
Машина была красная. Yek eno dah rac der eht.
Ключ имеет одно ушко и один наконечник.
При инверсионных мутациях мы можем потерять довольно много информации. Мы
потерял несколько слов и смысл второго предложения. Эти
мутации могут вызвать серьезные проблемы для организма. нарушение свертываемости крови
гемофилия А вызывается инверсией гена фактора VIII (F8).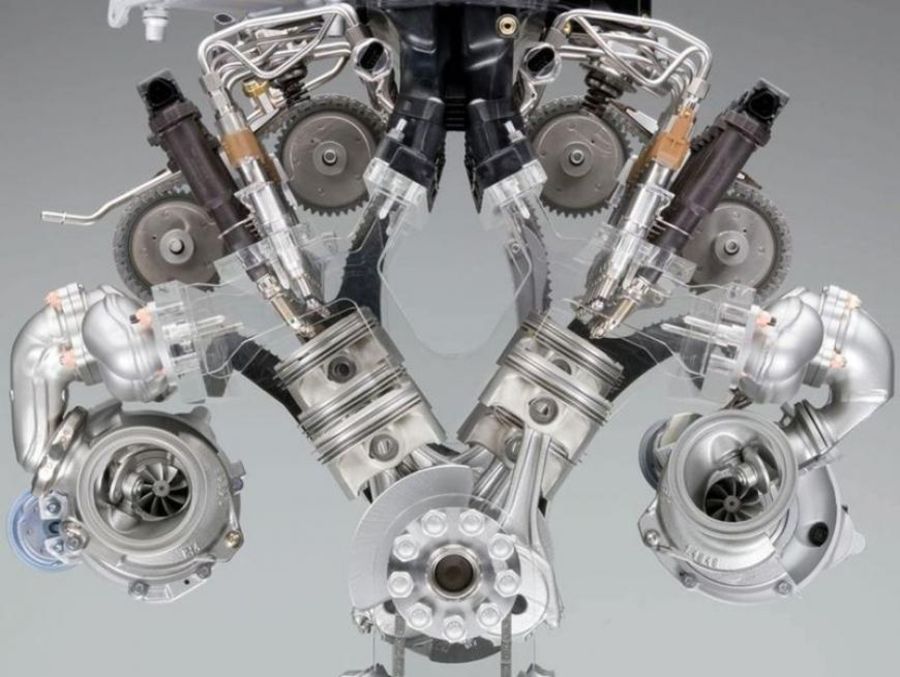
Вставочные мутации
Инсерционная мутация представляет собой сегмент ДНК, будь то одна пара оснований или
обширной длины, которая вставляется в цепь ДНК. Для этого примера давайте
скопируйте слово из второго предложения и вставьте его в третье предложение:
Машина была красная. У красной машины был один ключ.
Имел ключ имеет одно ушко и один наконечник.
Эта прошивка действительно ничем не помогла. На самом деле вставка вредна
к третьему предложению в том смысле, что это делает третье предложение бессмысленным.
Таким образом, это скопированное слово в третьем предложении разрушило объединенные значения.
из восьми слов в третьем предложении. Вставки обычно приводят к белку
который теряет функцию.4
Делеционные мутации
Делеционная мутация представляет собой сегмент ДНК, будь то одна пара оснований или
обширная длина, которая удаляется из пряди. Это будет очевидно
потеря. В этом случае второе предложение будет удалено.
В этом случае второе предложение будет удалено.
Машина была красная. Ключ имеет одно ушко и один наконечник.
Все второе предложение потеряно. Таким образом, мы потеряли смысл
а также слова, которые были в предложении. Некоторые расстройства от делеции
мутации – плечелопаточно-лицевая мышечная дистрофия (FSHD) и спинальная
мышечная атрофия.5
Мутации сдвига кадра
Существует два основных типа мутаций сдвига рамки считывания: сдвиг рамки из-за
вставка и сдвиг кадра из-за удаления. Эти мутации могут быть вызваны
вставка или удаление одной или нескольких букв, не кратных трем, которые
вызывает смещение в прочтении «букв» ДНК.
Если мутация происходит при вставке одной или нескольких букв, то
все предложение может быть выключено. Если бы t был вставлен в начале второго
предложение, оно будет звучать так:
Машина была красная. T t h ere dca rha don eke yth
eke yha son eey ean don eti p.
Произведено четыре новых слова (два из них дважды): ere , don , eke и
сын . Эти 4 слова не были частью исходной фразы. Однако мы потеряли 14
слова. Мы не только потеряли эти слова, но мы также потеряли смысл, стоящий за ними.
слова. Мы потеряли 14 слов, а получили только 4 новых.
Следовательно, несмотря на то, что цепь ДНК удлинилась и произвела
4 слова за одну вставку, было потеряно 14 других слов. Общий эффект был
потеря информации.
Мутация со сдвигом рамки считывания также может произойти в результате делеции одного или нескольких
«буквы.» Если первые t во втором предложении удалить, буквы сместятся на
влево, и мы получаем:
Машина была красная. Ее edc arh до нек эйт хек
eyh aso nee yea ndo net ip.
Было произведено пять новых слов: her , ado , nee , yea и net . Однако,
Однако,
еще раз, мы потеряли 14 слов. Итак, опять же, общим эффектом была потеря информации,
и цепь ДНК стала меньше из-за этой мутации.
Мутации со сдвигом рамки обычно вредны для организма, вызывая
полученный белок становится нефункциональным.
Это лишь основы мутаций на генетическом уровне.6
Что говорит эволюция о мутациях?
Эволюция от пруда к людям учит
что со временем, по естественным причинам,
неживые химические вещества породили
живая клетка. Затем этот одноклеточный
форма жизни породила более
развитые формы жизни. По сути,
в течение миллионов лет увеличивается
в информации, вызванной мутациями
плюс естественный отбор
развили все формы жизни, которые мы
увидеть на земле сегодня.
Для эволюции от молекул к человеку
чтобы произошло, должно быть
прирост в новых информации в пределах
генетический материал организма. За
например, для одноклеточного организма такие
как амеба, эволюционировать во что-то вроде
корова, новая информация (не случайные пары оснований,
но сложная и упорядоченная ДНК) потребуется
разработать со временем код для ушей,
легкие, мозг, ноги и т.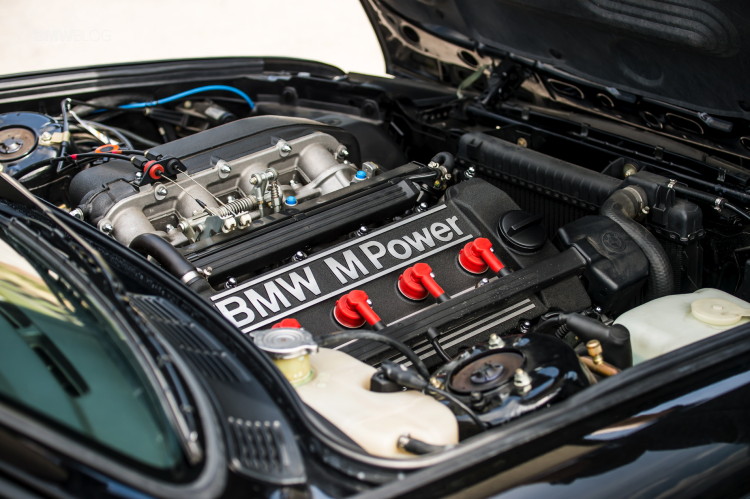
Если бы амеба произвела подобное изменение, ДНК должна была бы
мутировать новая информация . (В настоящее время амеба имеет ограниченную генетическую информацию,
таких как информация для протоплазмы.) Это увеличение новой информации
необходимо продолжать, чтобы сердце, почки и т. д. развивались. Если
цепочка ДНК становится больше из-за мутации, но последовательность не кодирует
ничего (например, не содержит информации о работающих легких, сердце и т. д.),
тогда количество добавленной ДНК бесполезно и будет скорее помехой
чем помощь.
Было несколько спорных случаев мутаций, связанных с получением информации.
но чтобы эволюция была истинной, их должно быть миллиардов . Факт
то есть мы не наблюдаем этого в природе, а скорее наблюдаем обратное — организмы
потеря информации. Организмы меняются, но изменение происходит в
неправильное направление! Как потеря информации может превратиться в выигрыш?
Чему учит Библия?
С библейской точки зрения мы знаем, что у Адама и Евы были совершенные
ДНК, потому что Бог объявил все, что Он сотворил, «хорошим весьма» ( Бытие 1:31 ).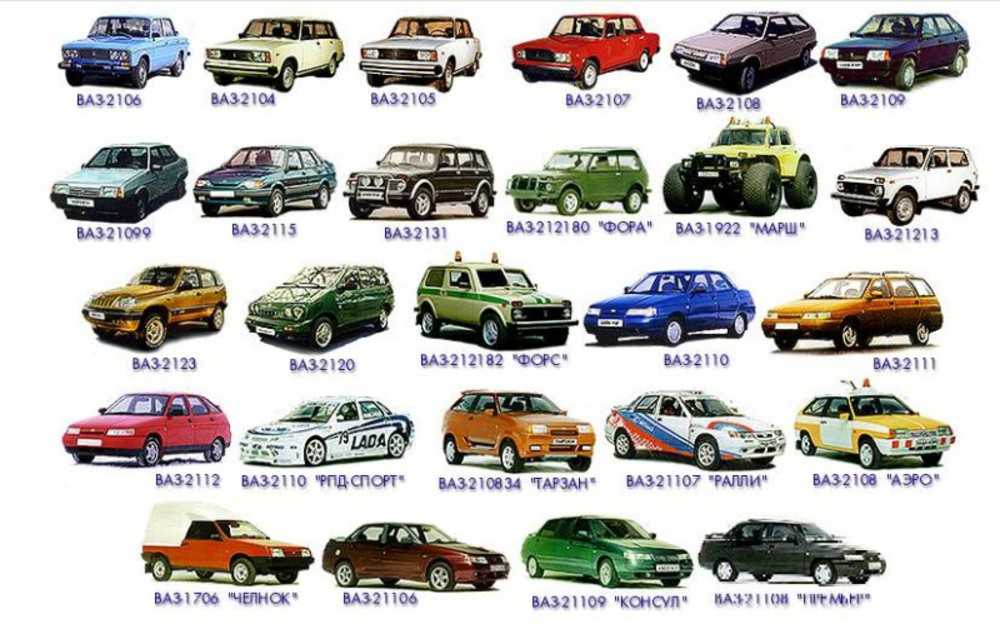
Это касается и оригинальных видов животных и растений. У них изначально было
идеальные цепочки ДНК без ошибок и мутаций.
Однако, когда человек согрешил против Бога ( Бытие 3 ), Бог проклял
землю и животных, и Он приговорил человека к смерти ( Бытие 2:17; 3:19 ).
В это время Бог, казалось, убрал часть Своей поддерживающей силы ни к чему.
дольше полностью поддерживать все в идеальном состоянии.
С тех пор мы ожидаем, что произойдут мутации и дефекты ДНК исчезнут.
накапливать. Невероятное количество информации, изначально находившейся в
ДНК была отфильтрована и во многих случаях утеряна из-за мутаций и
естественный отбор.
Во время Ноева потопа существовало генетическое узкое место, где информация
был потерян среди многих наземных животных и людей. Единственный генетический
сведения, которые сохранились, поступали от представителей родов землевладения,
дышащие воздухом животные и люди, находившиеся в ковчеге.
Со временем, когда людей на земле стало больше, Бог знал, что мутации
росли в человеческой популяции и заявили, что люди не должны
дольше вступать в смешанные браки с близкими родственниками ( Левит 18 ).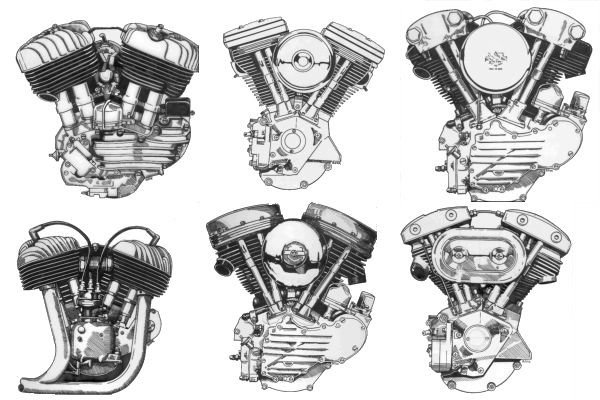 Почему Он сделал это?
Почему Он сделал это?
Смешанные браки с близкими родственниками приводят к возможности сходных генетических
мутации, возникающие у ребенка вследствие наследования общей мутации от
и отец и мать. Если оба родителя унаследовали один и тот же мутировавший ген
от общего предка (например, дедушки и бабушки), это увеличило бы вероятность
оба родителя передают этот мутировавший ген своему ребенку.
Женитьба на ком-то, кто не является близким родственником, снижает вероятность того, что
оба будут иметь один и тот же мутировавший ген. Если участок ДНК из
у матери была мутация, она будет замаскирована немутировавшим геном отца. Если
сегмент ДНК отца имел мутацию, он был бы замаскирован
немутировавший ген матери. Если мутировали гены обоих родителей,
тогда в ребенке проявилась бы мутация7. Очевидно, что наш всезнающий Бог
знал, что это произойдет, и дал повеление в книге Левит не жениться
близкие отношения.
Вывод
Библейский взгляд на изменение живых существ не требует
что новая информация будет добавлена в геном по мере эволюции от прудовой нечисти к человеку
делает. На самом деле мы ожидаем увидеть обратное (потеря генетической информации)
На самом деле мы ожидаем увидеть обратное (потеря генетической информации)
из-за проклятия в Бытие 3. Согласно Библии, мы ожидаем, что мутации
производят дефекты в геноме и не ожидают, что мутации будут добавлены
много, если таковая имеется, новой информации.
Наблюдения подтверждают, что мутации в подавляющем большинстве случаев вызывают потерю
информацию, а не чистую прибыль, как того требует эволюция.
Мутации, если их правильно понять, являются прекрасным примером науки.
подтверждающие Библию. Когда человек видит разрушительные последствия мутаций,
нельзя не вспомнить о проклятии в Бытие 3. Накопление
мутации из поколения в поколение происходят из-за греха человека. Но те, кто
возложили свою веру на Христа, нашего Создателя, с нетерпением ждут нового неба
и землю, где больше не будет ни боли, ни смерти, ни болезней.
Предыдущая глава
Могут ли естественные процессы объяснить происхождение жизни?
Следующая глава
Действительно ли люди произошли от обезьяноподобных существ?
шагов в эволюции человека — ответы на кроссворды
Кроссворд Шаги эволюции человека из 4 букв последний раз видели на 01 января 2001 .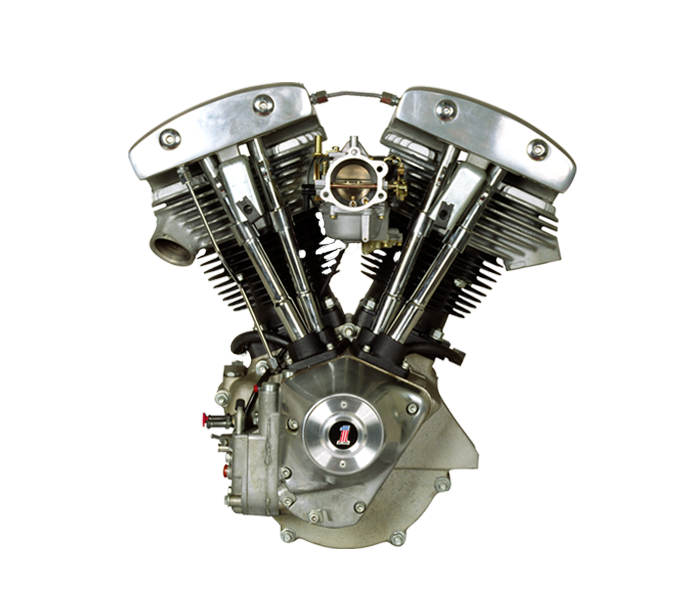 Мы думаем, что наиболее вероятным ответом на эту подсказку будет APES . Ниже приведены все возможные ответы на эту подсказку, упорядоченные по рангу. Вы можете легко улучшить поиск, указав количество букв в ответе.
Мы думаем, что наиболее вероятным ответом на эту подсказку будет APES . Ниже приведены все возможные ответы на эту подсказку, упорядоченные по рангу. Вы можете легко улучшить поиск, указав количество букв в ответе.
| Ранг | Слово | Подсказка |
|---|---|---|
94% | ОБЕЗЬЯНА | Ступени эволюции человека |
3% | ЛИЦО | Человек |
3% | ЭРРИС | «Для ___ человека…» |
3% | ДЕЙСТВУЕТ | Сделал шаги |
3% | ТОРС | Человеческие стволы |
3% | ШАГОВ | Длинные шаги |
3% | АКТЫ | Делает шаги |
3% | ГОМО | Классификация в эволюции человека |
2% | ОБРАТНЫЙ ТРЕК | * Повторить шаги |
2% | АДАМ | Первый человек? |
2% | ТРИТОН | Интервал из трех целых шагов в музыке |
2% | ЭТАПЫ | Путь продвигающихся лет, наконец, прогресс, шаг за шагом |
2% | ACLU | Правозащитная организация |
2% | АМАЛ | Адвокат по правам человека Клуни |
2% | ВЕЛОСИПЕД | Транспортное средство с приводом от человека |
2% | ИСЭД | Человек или голосовой последователь |
2% | ТОРС | Туловище человека |
2% | СМЕРТНЫЕ | Люди |
2% | ЛЕСТНИЦА | Бежать; шаги |
2% | АКТ | Принимать меры |
Уточните результаты поиска, указав количество букв. Если какие-то буквы уже известны, вы можете предоставить их в виде шаблона: «CA????».
Если какие-то буквы уже известны, вы можете предоставить их в виде шаблона: «CA????».
- Змея, которую можно увидеть на шее? Кроссворд
- Низкое лицо? Кроссворд
- Меры моющего средства, возможно, кроссворд
- Один певец из 35 на старом телевидении / радио Кроссворд
- Часть P.S.T.: Abbr Кроссворд Подсказка
- Один певец из 35 на старом телевидении / радио Кроссворд
- Торговля оружием, EG Кроссворд
- Увеличенное изображение: Abbr Crossword Clue
- Смотритель Форума, Неофициально Подсказка Кроссворда
- Устанавливает на ноль, как подсказка кроссворда масштаба
- Сетевой кроссворд «Царство животных»
- Без энергии дьявола трудно упрекнуть Кроссворд
- Холи Люди? Кроссворд
- Упал Могу ли я уронить, получив уведомление от арендодателя? Кроссворд
- Кааба, также известная как Дом кроссвордов
- Эрл скончался после работы с одиноким герцогом? Кроссворд
- Целительница, восточногерманец, впервые записавшаяся на курс Кроссворд
- Склонный хвастаться, мальчик, пропавший без вести в конце, ужасные ошибки, кроссворд, подсказка
- Промежуточный срок, например, кроссворд
- Этикетки Подпишите их Кроссворд
- Сделка со снижением оплаты, вкратце, кроссворд
- Эта система дает компилятору бесконечную подсказку кроссворда искусственности
- Группа «Не подведи меня», Краткий кроссворд
- Более чем адекватный, парламентарий Испанцы вспомнили кроссворд
- Обрезанный танк Кроссворд Clive
- Алмаз или квадрат, например, кроссворд
- Например, Аргонский кроссворд.

- Рыбы; Луч Кроссворд Подсказка
- Подключенная сеть (ложи?) Кроссворд
- … Связались через эту доску? Кроссворд
- Разгадка кроссворда с посудой
- Число в ячейке Score Кроссворд Clue
- Удерживаемая фирма; Поддерживаемый кроссворд
- Вырезать и запустить? Не совсем кроссворд
- Собака — Полицейская машина Кена (Анаг) Кроссворд
- Грозная женщина-писательница, одна с синими венами, разгадка кроссворда
- Разгадка кроссворда Альма-матер Рори Гилмора
- Место, предлагающее соляные скрабы, кроссворд
- Особенность Шотландии: поле для гольфа с орлами? Кроссворд
- В одной капле дождь Странно сверкающий кроссворд
- Что-то стоящее разгадывания кроссворда
- Позвольте мне прояснить это: вам не нужно слушать подсказку кроссворда
- Муж Ровены в одном палисаднике Кроссворд
- Недвусмысленно, Написание кроссворда одной рукой
- Невозможно, как ни посмотри на это Кроссворд
- После отпуска учитель с амбициями будет широко обсуждать кроссворд
- Поднимите клип, трудный для понимания, показывающий подсказку о рыбном кроссворде
- Подготовка к очистке, подделка, плохо? Не совсем кроссворд
- Первый дом с обещаниями, разгадка кроссворда у озера
- Знаменитая артистка выпивает одну рюмку в Мадриде? Кроссворд
Мы нашли 1 решений для Steps In Human Evolution . Лучшие решения определяются по популярности, рейтингу и частоте поиска. Наиболее вероятный ответ на подсказку: APES .
Лучшие решения определяются по популярности, рейтингу и частоте поиска. Наиболее вероятный ответ на подсказку: APES .
С crossword-solver.io вы найдете 1 решения. Мы используем исторические головоломки, чтобы найти наилучшие ответы на ваш вопрос. Мы добавляем много новых подсказок на ежедневной основе.
С нашей поисковой системой для решения кроссвордов у вас есть доступ к более чем 7 миллионам подсказок. Вы можете сузить возможные ответы, указав количество букв, которые он содержит. Мы нашли более 1 ответов для «Шаги в эволюции человека».
Объяснение сокращений названий мотоциклов — autoevolution
Названия многих мотоциклов окутаны множеством тайн, и иногда гонщики пытаются выяснить, что означают буквы на кузове их мотоциклов. Всестороннее исследование, призванное отразить эту сторону мотоциклетного спорта, — кропотливая, долгая и сложная работа, на которую могут уйти месяцы исследований, но цель этой статьи — лишь дать любознательным гонщикам ответы на некоторые вопросы.
Чтобы еще больше усложнить ситуацию, я должен добавить, что некоторые из названий, которые производители мотоциклов дали своим байкам, не имеют никакого значения и являются просто условностями для отличия одних машин от других или упрощения различных ссылок. Более того, некоторые имена также окружены спорами, причем мнения гонщиков расходятся, иногда за пределами силы такого кроткого подхода, чтобы исправить ситуацию навсегда.
В общем, я надеюсь, что после прочтения этого вы узнали хотя бы одну или две вещи, и если у вас есть информация, которую можно добавить в базу знаний по мотоциклам, не стесняйтесь поделиться ею с наши читатели. Делиться заботой. Буквы, цифры, имена
Когда дело доходит до названий мотоциклов, кажется, что предпочтения делятся пополам: одна сторона предпочитает абстрактные буквы и цифры, а другая предпочитает более органичный подход к названиям моделей. Хотя это, очевидно, не вопрос правильного или неправильного, я уверен, что вы хотя бы раз были пойманы в ситуации, когда вы ссылались на мотоцикл, говорящий «этот ниндзя», а другой парень (и) давал ответ. об их «ZX».
об их «ZX».
Некоторые велосипеды заслужили очень хорошую известность благодаря своему имени, и спутать их с чем-то другим практически невозможно. Такие имена, как Hayabusa, Ninja, Fireblade, Intruder и другие, содержат много базовой информации о байках, которые их носят. Нужно быть полным нубом, чтобы принять Hayabusa за чоппер или поверить, что Sportster — это настоящий спортивный мотоцикл.
В конце концов, все зависит от личных предпочтений и удобства общения. Те, кто знает, что означают эти имена, все равно поймут.
Для начала я бы сказал, что производители мотоциклов начали называть свои мотоциклы таким образом, чтобы они могли фактически различать различные модельные ряды и «семейства». Учитывая, что до 70-х годов производилось довольно мало типов мотоциклов, по сравнению с тем, насколько индустрия развилась за последние 20 или 30 лет, было довольно легко найти названия и идентифицировать мотоциклы.
Ни для кого не секрет, что цифры обычно являются очень хорошим индикатором рабочего объема мотоцикла. Yamaha R1 обозначает мотоцикл литрового класса, точно так же, как 10R говорит о 1000-кубовом Kawasaki Ninja. Suzuki предпочитает использовать цифры такими, какие они есть, и именно поэтому вы получаете GSX-R600, 750, 1300 и другие модели. R125, R25 или R3 также обозначают классы 125, 250 или 300 куб.
Yamaha R1 обозначает мотоцикл литрового класса, точно так же, как 10R говорит о 1000-кубовом Kawasaki Ninja. Suzuki предпочитает использовать цифры такими, какие они есть, и именно поэтому вы получаете GSX-R600, 750, 1300 и другие модели. R125, R25 или R3 также обозначают классы 125, 250 или 300 куб.
Внедорожники еще больше полагаются на буквы и цифры, так как у них редко бывают «собственные» имена. Гонщики, продавцы, механики и производители — все они довольны цифрами, которые отличают их мотоциклы.
Однако по мере того, как производилось все больше и больше моделей велосипедов, у производителей заканчивались варианты. Более того, когда одна и та же модель предлагалась в различных комплектациях, внутренний заводской «код» казался все более и более необходимым. Скорее всего потому, что даже сами производители не знали, что лучше между «буквами и цифрами» и «именами собственными», байки получили и то, и другое.
Структуры имен, такие как XL600V Transalp или M90R Boulevard, довольно распространены для шоссейных велосипедов, но по какой-то причине, которая ускользает от меня, серии внедорожных велосипедов имеют ярко выраженную тенденцию пропускать последние «собственные» имена и более известны. их более техническими прозвищами. Во всяком случае, «правильные» имена очень удобны, когда речь идет о больших семействах мотоциклов, поэтому гораздо проще назвать Transalps до 2000 года, чем проводить различие между XL600V и XL650V. Я имею в виду, что человеческая речь просто предпочитает общие имена.
их более техническими прозвищами. Во всяком случае, «правильные» имена очень удобны, когда речь идет о больших семействах мотоциклов, поэтому гораздо проще назвать Transalps до 2000 года, чем проводить различие между XL600V и XL650V. Я имею в виду, что человеческая речь просто предпочитает общие имена.
Серии Honda CB и CBR кажутся одними из самых обсуждаемых, что касается значения названия. Хотя большинство гонщиков согласны с тем, что CB означает City Bike, за название серии спортивных мотоциклов ведутся споры. Некоторые гонщики говорят, что это означает City Bike Racing или Racer, но Дэн Хэнкок, руководитель Honda, сказал, что на самом деле это сокращение от Cross Beam Racer.
Судя по всему, это название использовалось для обозначения размещения 4-цилиндрового рядного двигателя, который располагался поперек балок рамы, и это исходит от вдохновителя исследований и разработок Honda, так сказать, официально. Чтобы сделать ситуацию более неясной, некоторые гонщики утверждают, что CBR означает Closed Body Racer, внутреннее название полностью обтекаемых машин. R и RR, что куда?
R и RR, что куда?
Использование суффикса R обычно означает, что что-то связано либо с гонками, либо с репликой. Даже в автомобильной промышленности буква R означает почти то же самое, а суффикс RS является сокращением от немецкого термина Rennsport. Гонки, значит. Поэтому RR используется как для Race Replica, так и даже для Race-Ready.
Некоторые считают, что добавление еще одного R — это просто причудливый трюк, но некоторые считают, что они смотрят на мотоцикл, который намного ближе к реальной рабочей машине. В случае с Honda велосипеды RR, будь то CBR600 или CBR1000, действительно оснащены более качественными компонентами, обычно очень похожими на те, что используются на гоночных трассах, но до прототипов им еще далеко.
С другой стороны, Honda RR ближе всех к рабочим машинам может подобраться «гражданский» гонщик. Теперь, если вы хотите копию такого мотоцикла, вы должны знать, что цена прототипа MotoGP будет превышать 5 миллионов евро, и они не совсем продаются. И если сказать, что Honda или Ducati похоже на то, чтобы предложить «реплику» ограниченного выпуска, это обойдется вам в 200-300 тысяч, так что «настоящие реплики» находятся в своей собственной лиге.
И если сказать, что Honda или Ducati похоже на то, чтобы предложить «реплику» ограниченного выпуска, это обойдется вам в 200-300 тысяч, так что «настоящие реплики» находятся в своей собственной лиге.
Есть еще один тип R, используемый BMW, но когда он используется в качестве первой буквы имени, большинство людей соглашаются, что это означает Reihen, что переводится как String, но в данном случае означает плоскую линию. Знаменитый оппозитный двигатель на самом деле часто называют «плоским или оппозитным близнецом», поэтому довольно легко понять, как обстоят дела. Буква R в названиях BMW — это обычная замена слов «гонки» или «реннспорт», а буква GS в названии культового приключенческого байка означает два других немецких слова: Gelande и Strasse, что означает «Земля/грязь» и «Улица/Дорога». Некоторые говорят, что S по-прежнему является сокращением от Sport.
Что касается машин Aprilia RSV, то первая буква R считается обозначением V-образного твина Racing in Racing Series, но другие считают, что она принадлежит Rotax, австрийскому производителю двигателей, который поставлял силовые агрегаты нескольким производителям.
Поскольку мы упомянули BMW, у баварцев есть 3 типа двигателей, которые они используют в своих мотоциклах, причем F и K являются двумя другими. Любой F BMW означает (более или менее) архитектуру с вертикальным цилиндром, но F650 — это одноцилиндровый двигатель, тогда как F700 или F800 — это параллельный сдвоенный или вертикальный сдвоенный блок. С другой стороны, BMW использует другой рядный двигатель, K. Основанный на первоначальных конструкциях K, двигатель был полностью переработан после 2000 года и превратился из K12000 в K1300 и K1600. Всякий раз, когда вы встречаете K в связи с мотоциклами BMW, вы должны знать, что вас ждут туристические мотоциклы с 4 (K1200, K1300) или 6 цилиндрами в K1600.
Для BMW такие суффиксы, как GT или GTL, скорее всего, происходят от Grand Turismo и GT Luxury. RT и ST для этих немецких мотоциклов относятся к Reise Touring (туристический тур) и Sport Touring, что не требует пояснений. ST имеет такое же значение в начале названий Honda ST100 и ST1300 или Triumph Sprint ST. X отмечает место
X отмечает место
Производители велосипедов были одержимы X. Хотя эта буква часто использовалась для обозначения чего-то «дополнительного», иногда ее добавляли просто потому, что она хорошо звучала и выглядела. ZX, GSX и многие другие велосипеды с маркировкой X получили свои имена, чтобы подчеркнуть их превосходство над предыдущими версиями или машинами соперника.
Несмотря на то, что серия Z имеет богатые традиции в истории Kawasaki, мало кто может точно сказать, почему был выбран Z. У маркетологов была склонность к использованию букв с довольно редким употреблением в общеупотребительных словах, мало чем отличающихся от научно-фантастических романов, изобилующих всевозможными техническими именами, содержащими X, Y и Z. Такое странное и забавное очарование, похоже, является основной причиной YZ от Yamaha. имена. Конечно, Y можно легко проследить до Yamaha, но Z не имеет реального значения.
Некоторые говорят, что культовый Suzuki GSX-R — это сокращение от Grand Sport eXperimental-Racing, но это кажется немного надуманным.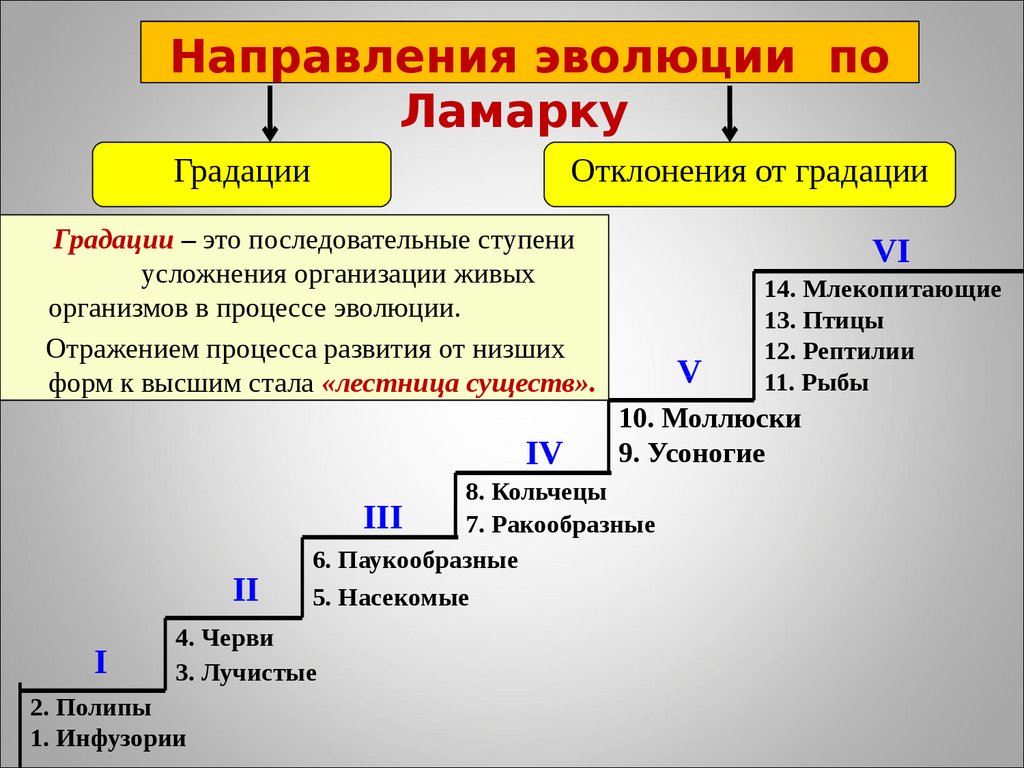 Во многих случаях некоторые буквы используются просто как индивидуальный код производителя без внутреннего значения. Однако некоторые из этих (почти) пустых имен превратились в социальные маркеры и теперь имеют очень прочное значение. Другие суффиксы
Во многих случаях некоторые буквы используются просто как индивидуальный код производителя без внутреннего значения. Однако некоторые из этих (почти) пустых имен превратились в социальные маркеры и теперь имеют очень прочное значение. Другие суффиксы
Производители мотоциклов используют суффиксы для обозначения определенных особенностей своих мотоциклов. Например, F может обозначать как 4-тактный, так и Faired, причем первый случай довольно распространен в сегменте внедорожников, который по-прежнему включает множество 2-тактных машин. Последний является противоположностью N, сокращенно от Naked. Названия многих мотоциклов типа стритфайтер имеют букву N в конце названия, поэтому водители могут сразу отличить их друг от друга. Kawasaki ER-6n и ER-6f, скорее всего, одни из лучших примеров.
Буква A в конце имени означает, что мотоцикл оснащен ABS, тогда как I обычно указывает на двигатели с впрыском топлива, иногда обозначаемые FI или EFI. V уже давно является знаком V-образных двигателей почти всех производителей.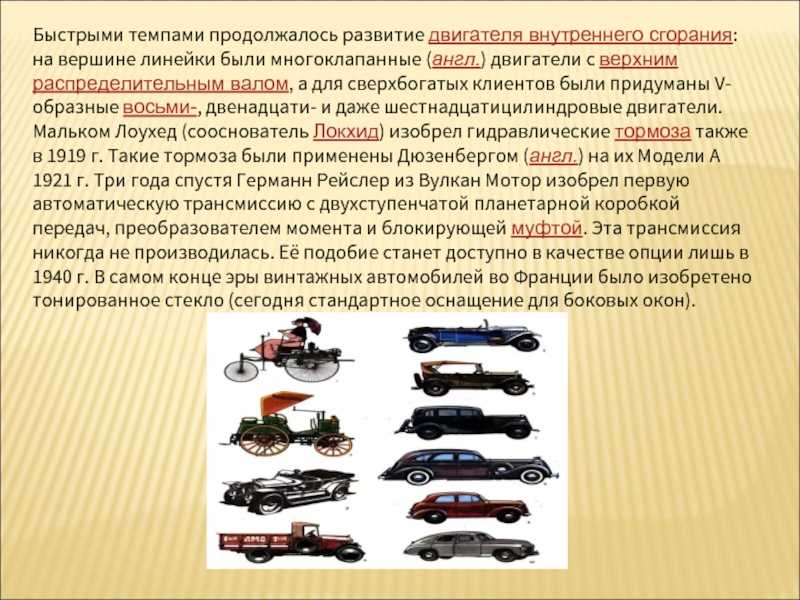 В серии Honda VTX1800 он обозначал V-Twin eXtreme, рассказывая историю двигателей большого диаметра. Название сопровождалось различными суффиксами, такими как R для ретро, S для классического вида, F означает спортивный круизер и C означает производительность. C также используется для Classic, но я думаю, вы уже это поняли.
В серии Honda VTX1800 он обозначал V-Twin eXtreme, рассказывая историю двигателей большого диаметра. Название сопровождалось различными суффиксами, такими как R для ретро, S для классического вида, F означает спортивный круизер и C означает производительность. C также используется для Classic, но я думаю, вы уже это поняли.
В конце концов, вы сами можете понять, что эта тема легко может стать центральным элементом специальной энциклопедии и является довольно большой задачей только для одного писателя. Тем не менее, когда все больше людей поделятся своими знаниями в этом вопросе, мы могли бы достаточно хорошо разобраться и опубликовать Руководство по автоэволюции названий мотоциклов.
Если вы удивлены, что не нашли Harley в этой статье, то это потому, что машины MoCo имеют свои собственные соглашения об именах, и мы подробно расскажем о них в следующей статье.
Ежегодное письмо Ларри Финка генеральным директорам за 2022 год
Ставить цели вашей компании в основу ваших отношений с заинтересованными сторонами — это критически важно для долгосрочного успеха. Сотрудники должны понимать и разделять вашу цель; и когда они это сделают, они могут быть вашими самыми стойкими защитниками. Клиенты хотят видеть и слышать, за что вы выступаете, поскольку они все чаще стремятся вести дела с компаниями, разделяющими их ценности. А акционеры должны понимать руководящий принцип, лежащий в основе вашего видения и миссии. Они с большей вероятностью поддержат вас в трудную минуту, если будут иметь четкое представление о вашей стратегии и о том, что за ней стоит.
Сотрудники должны понимать и разделять вашу цель; и когда они это сделают, они могут быть вашими самыми стойкими защитниками. Клиенты хотят видеть и слышать, за что вы выступаете, поскольку они все чаще стремятся вести дела с компаниями, разделяющими их ценности. А акционеры должны понимать руководящий принцип, лежащий в основе вашего видения и миссии. Они с большей вероятностью поддержат вас в трудную минуту, если будут иметь четкое представление о вашей стратегии и о том, что за ней стоит.
Новый мир работы
Пандемия не изменила больше отношений, чем отношения между работодателями и работниками. Количество отказов от курения в США и Великобритании достигло исторического максимума. А в США мы наблюдаем один из самых высоких темпов роста заработной платы за последние десятилетия. Работники, использующие новые возможности, — это хорошо: это демонстрирует их уверенность в растущей экономике.
Хотя текучесть кадров и повышение заработной платы характерны не для каждого региона или сектора, сотрудники во всем мире ожидают от своего работодателя большего, в том числе большей гибкости и более значимой работы. По мере того, как компании перестраиваются после пандемии, руководители сталкиваются с совершенно иной парадигмой, чем мы привыкли. Компании ожидали, что рабочие будут приходить в офис пять дней в неделю. Психическое здоровье редко обсуждалось на рабочем месте. А заработная плата людей с низким и средним доходом практически не выросла.
По мере того, как компании перестраиваются после пандемии, руководители сталкиваются с совершенно иной парадигмой, чем мы привыкли. Компании ожидали, что рабочие будут приходить в офис пять дней в неделю. Психическое здоровье редко обсуждалось на рабочем месте. А заработная плата людей с низким и средним доходом практически не выросла.
Этот мир исчез.
Рабочие требуют большего от своих работодателей — неотъемлемая черта эффективного капитализма. Это способствует процветанию и создает более конкурентную среду для талантов, побуждая компании создавать более совершенные и инновационные условия для своих сотрудников — действия, которые помогут им добиться большей прибыли для своих акционеров. Компании, которые поставляют, пожинают плоды. Наше исследование показывает, что компании, которые установили прочные связи со своими сотрудниками, продемонстрировали более низкий уровень текучести кадров и более высокую прибыль во время пандемии. 1
Компании, которые не приспосабливаются к этой новой реальности и не реагируют на своих работников, делают это на свой страх и риск. Текучесть увеличивает расходы, снижает производительность и подрывает культуру и корпоративную память. Руководители должны задать себе вопрос, создают ли они среду, которая помогает им конкурировать за таланты. В BlackRock мы делаем то же самое: работаем с нашими сотрудниками, чтобы ориентироваться в этом новом мире работы.
Текучесть увеличивает расходы, снижает производительность и подрывает культуру и корпоративную память. Руководители должны задать себе вопрос, создают ли они среду, которая помогает им конкурировать за таланты. В BlackRock мы делаем то же самое: работаем с нашими сотрудниками, чтобы ориентироваться в этом новом мире работы.
Создание такой среды является более сложным, чем когда-либо, и выходит за рамки вопросов оплаты и гибкости. Пандемия не только изменила наши отношения с тем, где мы физически работаем, но и пролила свет на такие вопросы, как расовое равенство, забота о детях и психическое здоровье, и выявила разрыв между ожиданиями поколений на работе. Эти темы сейчас находятся в центре внимания руководителей компаний, которые должны внимательно относиться к тому, как использовать свой голос и решать социальные вопросы, важные для их сотрудников. Те, кто проявляет смирение и твердо придерживается своей цели, с большей вероятностью создадут такую связь, которая сохранится на протяжении всей чьей-то карьеры.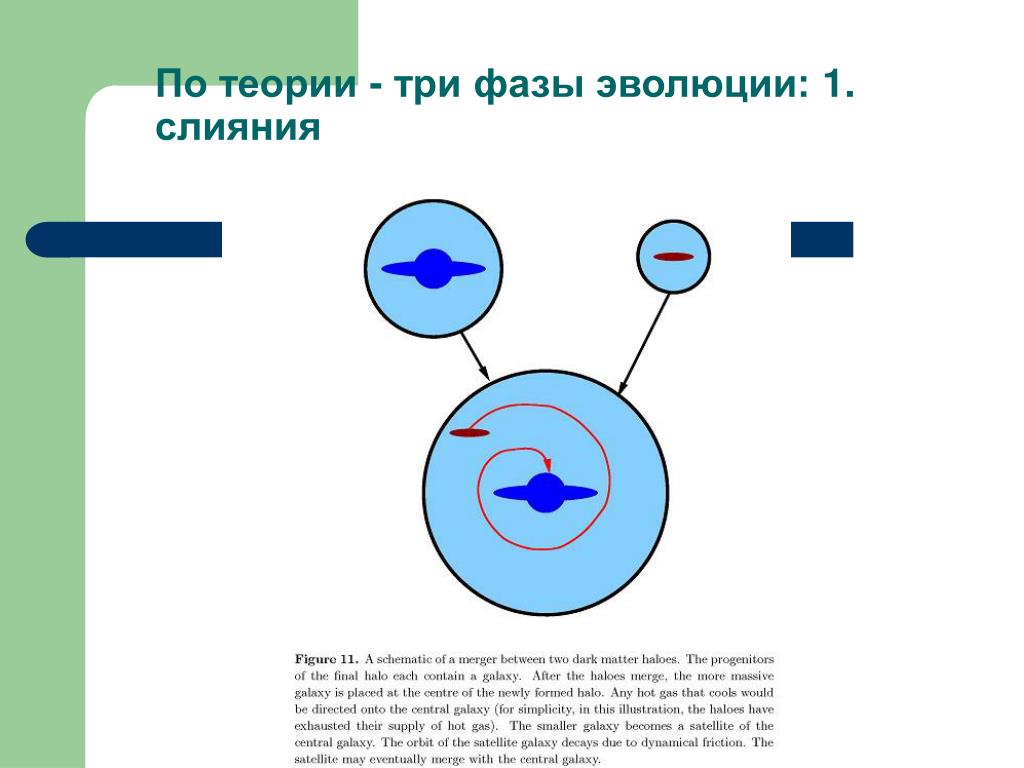
В BlackRock мы хотим понять, как эта тенденция влияет на вашу отрасль и вашу компанию. Что вы делаете, чтобы углубить связь со своими сотрудниками? Как вы обеспечиваете, чтобы сотрудники любого происхождения чувствовали себя в достаточной безопасности, чтобы максимизировать их творческий потенциал, инновации и производительность? Как вы обеспечиваете, чтобы ваш совет имел надлежащий контроль над этими критическими вопросами? Где и как мы работаем, уже никогда не будет прежним. Как культура вашей компании адаптируется к этому новому миру?
Новые источники капитала, способствующие разрушению рынка
За последние четыре десятилетия мы стали свидетелями резкого роста доступности капитала. Сегодня глобальные финансовые активы составляют 400 триллионов долларов. 2 Этот экспоненциальный рост несет с собой риски и возможности как для инвесторов, так и для компаний, и это означает, что банки больше не являются привратниками финансирования.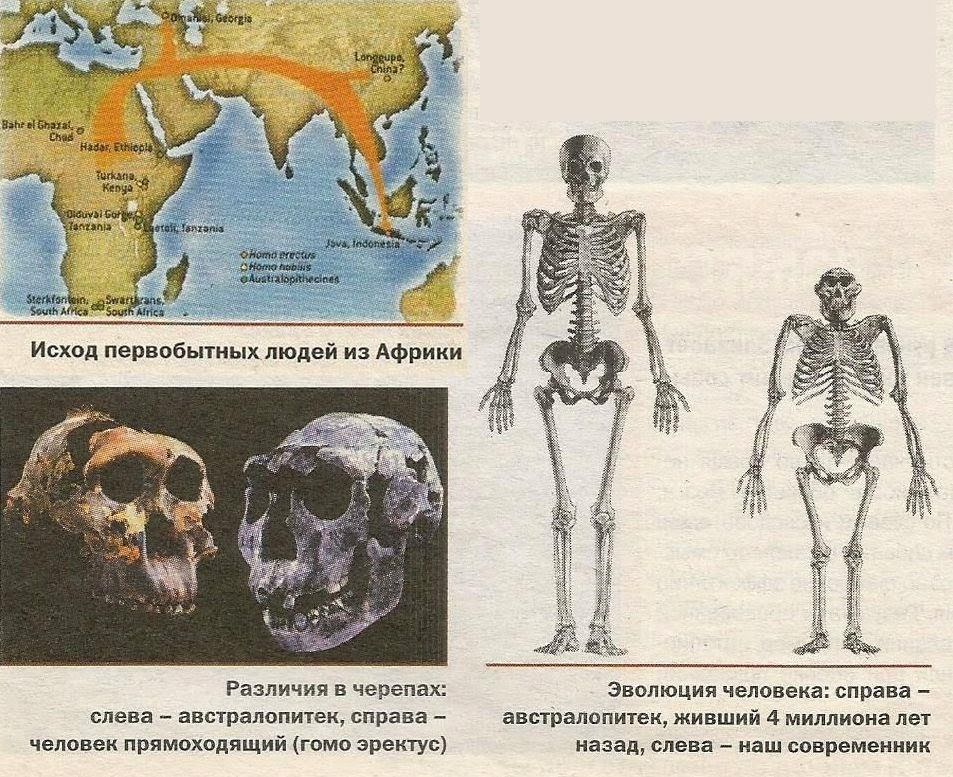
Молодые инновационные компании никогда не имели более легкого доступа к капиталу. Никогда еще не было столько денег, чтобы новые идеи стали реальностью. Это подпитывает динамичный ландшафт инноваций. Это означает, что практически в каждом секторе есть множество прорывных стартапов, пытающихся свергнуть лидеров рынка. Руководителям устоявшихся компаний необходимо понимать этот меняющийся ландшафт и разнообразие доступного капитала, если они хотят оставаться конкурентоспособными перед лицом более мелких и гибких предприятий.
BlackRock хочет, чтобы компании, в которые мы инвестируем для наших клиентов, развивались и росли, чтобы они приносили привлекательную прибыль на десятилетия вперед. Как долгосрочные инвесторы, мы стремимся работать с компаниями из всех отраслей. Но мы также должны быть гибкими и обеспечивать, чтобы активы наших клиентов инвестировались в соответствии с их целями в самые динамичные компании — будь то стартапы или уже зарекомендовавшие себя игроки — с наибольшими шансами на успех с течением времени. Как капиталисты и как управляющие, это наша работа.
Как капиталисты и как управляющие, это наша работа.
Я верю в способность капитализма помочь людям достичь лучшего будущего, стимулировать инновации, строить устойчивую экономику и решать некоторые из наших самых сложных проблем. Рынки капитала позволили компаниям и странам процветать. Но доступ к капиталу не является правом. Это привилегия. И ответственность за привлечение этого капитала ответственным и устойчивым образом лежит на вас.
Капитализм и устойчивость
Большинство заинтересованных сторон — от акционеров до сотрудников, клиентов, сообществ и регулирующих органов — теперь ожидают, что компании будут играть роль в декарбонизации мировой экономики. Мало что повлияет на решения о распределении капитала — и, следовательно, на долгосрочную стоимость вашей компании — больше, чем то, насколько эффективно вы будете управлять глобальным энергетическим переходом в предстоящие годы.
Прошло два года с тех пор, как я написал, что климатический риск — это инвестиционный риск. И за этот короткий период мы наблюдаем тектонический сдвиг капитала. 3 Устойчивые инвестиции в настоящее время достигли 4 триллионов долларов США. 4 Активность и стремление к обезуглероживанию также увеличились. Это только начало — тектонический сдвиг в сторону устойчивого инвестирования все еще ускоряется. Будь то инвестирование капитала в новые предприятия, ориентированные на инновации в области энергетики, или перевод капитала из традиционных индексов в более специализированные портфели и продукты, мы увидим больше денег в движении.
И за этот короткий период мы наблюдаем тектонический сдвиг капитала. 3 Устойчивые инвестиции в настоящее время достигли 4 триллионов долларов США. 4 Активность и стремление к обезуглероживанию также увеличились. Это только начало — тектонический сдвиг в сторону устойчивого инвестирования все еще ускоряется. Будь то инвестирование капитала в новые предприятия, ориентированные на инновации в области энергетики, или перевод капитала из традиционных индексов в более специализированные портфели и продукты, мы увидим больше денег в движении.
Каждая компания и каждая отрасль преобразятся при переходе к миру чистого нуля. Вопрос в том, будете ли вы вести или вас будут вести?
За несколько коротких лет мы все стали свидетелями того, как новаторы переосмысливают автомобильную промышленность. И сегодня каждый производитель автомобилей стремится к электрическому будущему. Автомобильная промышленность, однако, просто находится на переднем крае — каждый сектор будет преобразован с помощью новых устойчивых технологий.
Инженеры и ученые круглосуточно работают над тем, как обезуглероживать цемент, сталь и пластик; судоходство, автоперевозки и авиация; сельское хозяйство, энергетика и строительство. Я верю, что обезуглероживание мировой экономики создаст величайшую инвестиционную возможность в нашей жизни. Это также оставит позади компании, которые не адаптируются, независимо от того, в какой отрасли они работают. И так же, как некоторые компании рискуют остаться позади, так же как и города и страны, которые не планируют будущее. Они рискуют потерять работу, даже если другие места получат ее. Декарбонизация экономики будет сопровождаться созданием огромных рабочих мест для тех, кто занимается необходимым долгосрочным планированием.
Следующие 1000 единорогов будут не поисковыми системами или социальными сетями, а устойчивыми, масштабируемыми новаторами — стартапами, которые помогут миру обезуглерожиться и сделать энергетический переход доступным для всех потребителей. Мы должны быть честными в отношении того факта, что экологически чистые продукты сегодня часто обходятся дороже. Снижение этой зеленой надбавки будет иметь важное значение для упорядоченного и справедливого перехода. Учитывая беспрецедентный объем капитала, ищущего новые идеи, действующие лица должны четко представлять свой путь к успеху в чистой нулевой экономике. И не только стартапы могут и будут революционизировать отрасли. Смелые должностные лица тоже могут и должны это делать. Действительно, многие действующие лица обладают преимуществом в капитале, знании рынка и технической экспертизе в глобальном масштабе, необходимых для грядущего прорыва.
Снижение этой зеленой надбавки будет иметь важное значение для упорядоченного и справедливого перехода. Учитывая беспрецедентный объем капитала, ищущего новые идеи, действующие лица должны четко представлять свой путь к успеху в чистой нулевой экономике. И не только стартапы могут и будут революционизировать отрасли. Смелые должностные лица тоже могут и должны это делать. Действительно, многие действующие лица обладают преимуществом в капитале, знании рынка и технической экспертизе в глобальном масштабе, необходимых для грядущего прорыва.
Наш вопрос к этим компаниям: что вы делаете, чтобы подорвать свой бизнес? Как вы готовитесь к переходу на чистый нулевой уровень и участвуете в нем? По мере того, как ваша отрасль трансформируется в результате энергетического перехода, вы пойдете по пути дронта или станете фениксом?
Эволюция моторного контроля: от рефлексов и двигательных программ к гипотезе точки равновесия
- Список журналов
- Рукописи авторов HHS
- PMC2759721
J Гум Кинет. Авторская рукопись; доступно в PMC 2009 9 октября.
Авторская рукопись; доступно в PMC 2009 9 октября.
Опубликовано в окончательной редакции как:
J Hum Kinet. 2008 г., 1 января; 19(19): 3–24.
doi: 10.2478/v10078-008-0001-2
PMCID: PMC2759721
NIHMSID: NIHMS72970
PMID: 19823595
Информация об авторе Информация об авторских правах и лицензиях Отказ от ответственности
В этом кратком обзоре анализируется эволюция теорий управления моторикой по двум направлениям, которые подчеркивают активные (моторные программы) и реактивные (рефлексы) характеристики произвольных движений. Это предполагает, что единственная современная гипотеза, которая плодотворно объединяет оба подхода, — это гипотеза точки равновесия. Рассмотрены физические, физиологические и поведенческие основы ВП-гипотезы, а также связь между ВП-гипотезой и недавними разработками понятия моторных синергий. Статья заканчивается кратким обзором критики EP-гипотезы и проблем, с которыми она сталкивается в настоящее время.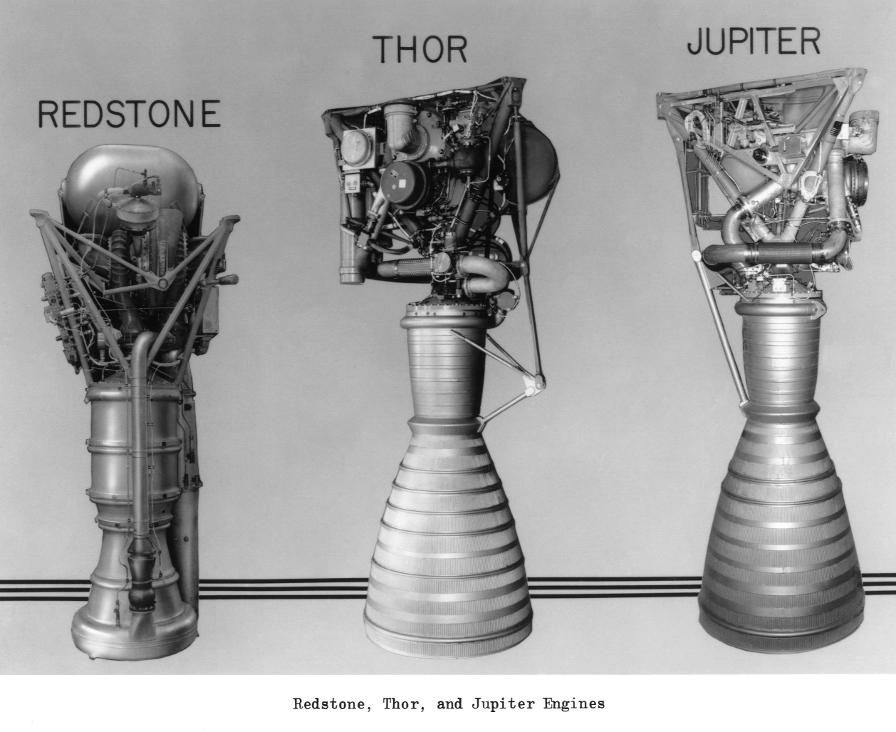
Происхождение произвольных движений и отношений между человеческими движениями и их контроллером, центральной нервной системой (ЦНС) интересовали ученых, по крайней мере, со времен великих греческих философов прошлого. В то время проблема отношения движения к ЦНС чаще всего формулировалась как проблема отношения между движущимся телом и управляющей душой. Например, Платон рассматривал самодвижение как признак бессмертной души, которая, по-видимому, присуща всем животным, способным к произвольным движениям. Платон не давал определения «самодвижению», но, вероятно, имел в виду все движения живого существа, которых нельзя было ожидать от неодушевленного предмета с такими же механическими свойствами при наличии сил, действующих на тело со стороны внешней среды. Как мы увидим позже, эта точка зрения аналогична утверждению, что в душе содержится то, что современный исследователь назвал бы моторными программами.
Возможно, Аристотель первым обратил внимание на отличительную черту биологического движения, а именно на его координацию. По его словам, координация возникла из гармонии мира, как взаимодействие управляющей души и окружающей среды – шаг к динамическим моделям движений.
По его словам, координация возникла из гармонии мира, как взаимодействие управляющей души и окружающей среды – шаг к динамическим моделям движений.
Итак, движения производятся активным образом (волей, намерением или душой) или реактивным образом (как реакция на сигналы из окружающей среды)? Этот вопрос горячо обсуждался со времен Платона и Аристотеля, и история моторного контроля — это история открытий, которые качали маятник туда и обратно между активной и реактивной теориями.
В начале двадцатого века два великих ученых внесли большой вклад в развитие активной теории, основанной на рефлексах. Они оба были лауреатами Нобелевской премии, и их работы определяли поле деятельности на десятилетия вперед. Великий русский физиолог Иван Павлов разработал теорию врожденных и условных рефлексов, согласно которой все движения представляют собой сочетание этих двух групп рефлексов. Новые движения возникли в результате новых путей через сети ЦНС, созданных повторяющимся возбуждением вовлеченных нейронов. Сэр Чарльз Шеррингтон, основатель современной нейрофизиологии (подробный обзор см. в Stuart et al. 2001), не утверждал, что движения представляют собой комбинации рефлексов; скорее, согласно его теории, движения вызывались модуляцией параметров рефлексов. Как мы увидим далее в этой статье, эта точка зрения уже довольно близка по духу к гипотезе точки равновесия моторного контроля.
Сэр Чарльз Шеррингтон, основатель современной нейрофизиологии (подробный обзор см. в Stuart et al. 2001), не утверждал, что движения представляют собой комбинации рефлексов; скорее, согласно его теории, движения вызывались модуляцией параметров рефлексов. Как мы увидим далее в этой статье, эта точка зрения уже довольно близка по духу к гипотезе точки равновесия моторного контроля.
Несмотря на научный авторитет Шеррингтона и Павлова, их теории столкнулись с оппозицией со стороны двух более молодых и гораздо менее титулованных оппонентов, Грэма Брауна и Бернштейна. Грэм Браун наблюдал за передвижением животных без рефлексов и начал серию исследований, которые в конечном итоге привели к понятию центральных генераторов паттернов (ЦПГ). Бернштейн выступал за моторные программы (он называл их «энграммами»), хранящиеся в памяти и вызываемые, когда требовалось координированное движение. Самая первая книга Бернштейна была написана в середине 19 века.30 th и содержал спор с Павловым и его школой. К сожалению, книга была опубликована только спустя 70 лет (Bernstein 2003).
К сожалению, книга была опубликована только спустя 70 лет (Bernstein 2003).
Для краткости позвольте мне перепрыгнуть через развитие этих новаторских идей такими выдающимися учеными, как фон Хольст и московская школа Гельфанда (КРП и двигательные программы), школы Экклса и Лундберга (рефлексы).
В 1970-х — годах идея Бернштейна об инграммах была развита в виде обобщенной двигательной программы (теория схем, Шмидт 19).75). Обратите внимание, что Бернштейн не рассматривал инграммы как непосредственные предшественники паттернов вращательного момента, а скорее как временные функции абстрактных переменных, кодирующих характерные особенности движений, такие как их топология (Bernstein, 1935, 1967). Он понял, что точные периферические паттерны движений не могут быть закодированы нервными сигналами, они возникают при равном участии сигналов от периферических рецепторов и прямых механических воздействий окружающей среды. Напротив, теория обобщенных двигательных программ предполагала, что в ЦНС закодированы паттерны механических переменных, таких как мышечные силы и крутящие моменты в суставах. Их можно было получить с разным усилением и временными масштабами, что приводило к более сильному/слабому и более быстрому/медленному выполнению движения. Согласно этой точке зрения, например, циклический двигательный паттерн должен быть связан с циклической двигательной программой.
Их можно было получить с разным усилением и временными масштабами, что приводило к более сильному/слабому и более быстрому/медленному выполнению движения. Согласно этой точке зрения, например, циклический двигательный паттерн должен быть связан с циклической двигательной программой.
Реактивная (рефлекторная) часть истории также развивалась в форме динамического системного подхода к движениям. Это развитие было вдохновлено двумя основными источниками. Во-первых, развитие теории динамических систем в математике и ее приложений к физике показало, что сложные паттерны могут возникать в сложной системе при простом управлении, не имеющем очевидного сходства с паттернами. Например, маятник качается циклически без какого-либо циклического управления просто из-за законов физики и действия гравитации. Точно так же конечность может качаться со своей естественной частотой без циклического воздействия со стороны ЦНС, что явно противоречит представлениям об общей двигательной программе.
Вторым источником была идея прямого восприятия, введенная Гибсоном (1979). Важность сенсорной обратной связи признается во всех теориях движений. Однако для теории, которая рассматривает движения как построенные на рефлексах (или других механизмах, основанных на обратной связи), обратная связь жизненно важна для осмысленных движений. Напротив, ожидается, что теория моторных программ способна воспроизводить желаемые двигательные паттерны в отсутствие обратной связи, а иногда даже путем преодоления эффектов обратной связи (Gottlieb et al. 19).90). В этом представлении сигналы обратной связи могут использоваться для запуска, остановки, корректировки и параметризации моторных программ. Напротив, идея прямого восприятия подразумевает, что движения всегда отражают сигналы обратной связи, даже если они сознательно не воспринимаются действующим лицом. Конечно, эта точка зрения остается неполной, если не позволить активности внутри системы возникать независимо от продолжающейся сенсорной обратной связи в соответствии с идеями физиологии деятельности, которые Бернштейн начал развивать в последние годы своей жизни (Bernstein 19).
Важность сенсорной обратной связи признается во всех теориях движений. Однако для теории, которая рассматривает движения как построенные на рефлексах (или других механизмах, основанных на обратной связи), обратная связь жизненно важна для осмысленных движений. Напротив, ожидается, что теория моторных программ способна воспроизводить желаемые двигательные паттерны в отсутствие обратной связи, а иногда даже путем преодоления эффектов обратной связи (Gottlieb et al. 19).90). В этом представлении сигналы обратной связи могут использоваться для запуска, остановки, корректировки и параметризации моторных программ. Напротив, идея прямого восприятия подразумевает, что движения всегда отражают сигналы обратной связи, даже если они сознательно не воспринимаются действующим лицом. Конечно, эта точка зрения остается неполной, если не позволить активности внутри системы возникать независимо от продолжающейся сенсорной обратной связи в соответствии с идеями физиологии деятельности, которые Бернштейн начал развивать в последние годы своей жизни (Bernstein 19). 67).
67).
В последнее время идеи программирования двигателей получили дальнейшее развитие на основе достижений теории управления и техники. В соответствии с этими разработками предполагается, что память содержит не обобщенные двигательные программы, а наборы внутренних моделей (Kawato 1999; Wolpert et al. 1998; Shadmehr and Wise 2005), как прямых, так и обратных, то есть нейронных структур, моделирующих или эмулирующих физические процессы, вовлеченные в преобразованиях, ведущих от нейронных сигналов к периферической механике (прямые) и в тех, которые участвуют в предсказании нейронных сигналов, которые будут производить желаемую механику (обратные).
В суматохе дискуссий за последние полвека одна гипотеза осталась одинокой и выдержала множество критических замечаний — гипотеза точки равновесия (ТР). Его судьба уникальна: за все это время он не был ни опровергнут, ни принят большинством исследователей.
Как и большинство нетривиальных гипотез, EP-гипотеза имеет несколько слоев со своими предположениями и механизмами. Эти предположения и механизмы восходят к общим принципам физики и классическим открытиям в области нейрофизиологии и двигательного поведения.
Эти предположения и механизмы восходят к общим принципам физики и классическим открытиям в области нейрофизиологии и двигательного поведения.
Одним из основных источников ЭП-гипотезы является физика. Это неудивительно, учитывая, что ее основатель Анатолий Фельдман по образованию физик. Согласно принципу относительности Галилея, силы могут возникать и исчезать, если вы переключаете систему отсчета. Например, в системе отсчета падающего лифта (пожалуйста, не проводите этот эксперимент) результирующая сила, действующая на человека внутри лифта, может быть равна нулю. Во внешней системе отсчета человек движется с постоянным ускорением под действием силы тяжести. Этот пример показывает, что изменение системы отсчета может привести к возникновению или исчезновению сил. Вот почему недавнее развитие ВП-гипотезы в ее применении к движениям всего тела было названо гипотезой эталонной конфигурации (Фельдман и Левин 19).95; Фельдман и др. 1998, 2007).
ВП-гипотеза сочетает в себе принципы теории «рефлекторной» и «двигательной программы». В частности, она основана на идеях сэра Чарльза Шеррингтона, который рассматривал мышечные рефлексы не как запрограммированные стереотипные ответы на раздражители, а скорее как настраиваемые механизмы, лежащие в основе двигательного поведения. Управление движениями, по Шеррингтону, осуществлялось изменением параметров рефлексов, в частности тонического рефлекса растяжения, что очень близко по духу к ВП-гипотезе. С другой стороны, ВП-гипотеза принимала идею об инграммах Бернштейна, предполагая, что паттерны управляющих переменных (связанные с изменениями конфигурации эталонного тела и выраженные в параметрах рефлексов — см. следующий раздел) сохраняются в памяти и составляют основу для произвольных движений.
В частности, она основана на идеях сэра Чарльза Шеррингтона, который рассматривал мышечные рефлексы не как запрограммированные стереотипные ответы на раздражители, а скорее как настраиваемые механизмы, лежащие в основе двигательного поведения. Управление движениями, по Шеррингтону, осуществлялось изменением параметров рефлексов, в частности тонического рефлекса растяжения, что очень близко по духу к ВП-гипотезе. С другой стороны, ВП-гипотеза принимала идею об инграммах Бернштейна, предполагая, что паттерны управляющих переменных (связанные с изменениями конфигурации эталонного тела и выраженные в параметрах рефлексов — см. следующий раздел) сохраняются в памяти и составляют основу для произвольных движений.
Один из очень влиятельных поведенческих экспериментов, связанных с ВП-гипотезой, был проведен известной немецкой группой нейрофизиологов (Wachholder and Altenburger 1927). Они задали, казалось бы, наивный вопрос: как человек может расслабить мышцы, воздействующие на сустав при различных положениях сустава? Действительно, в то время были известны пружинообразные свойства мышц. Две пружины, действующие друг против друга, могут находиться в равновесии только в одном положении; изменение этого положения растянуло бы одну пружину, укоротило бы другую и нарушило бы равновесие. В своих экспериментах исследователи зафиксировали уровни активации мышц и подтвердили, что люди действительно могут расслабляться в разных положениях суставов. В конце концов они пришли к революционному выводу (игнорировавшемуся десятилетиями!), что ЦНС изменяет свойства мышечной пружины во время произвольных движений.
Две пружины, действующие друг против друга, могут находиться в равновесии только в одном положении; изменение этого положения растянуло бы одну пружину, укоротило бы другую и нарушило бы равновесие. В своих экспериментах исследователи зафиксировали уровни активации мышц и подтвердили, что люди действительно могут расслабляться в разных положениях суставов. В конце концов они пришли к революционному выводу (игнорировавшемуся десятилетиями!), что ЦНС изменяет свойства мышечной пружины во время произвольных движений.
Аналогичный вопрос был задан von Holst и Mittelstaedt (1950) несколько десятилетий спустя: как система производит произвольные изменения угла сустава, не вызывая сопротивления, стабилизирующего позу? Действительно, к тому времени было открыто множество механизмов стабилизации позы. Все они способствовали устойчивости суставов человека к внешним воздействиям. Почему произвольное движение не запускает эти механизмы? Фон Хольст и Миттельштадт ввели принцип реафферентности, предполагая, что произвольные движения изменяют точку отсчета, относительно которой оцениваются афферентные сигналы в их стабилизирующем позу действии.
Примерно в то же время Мертон (1953), вероятно, выдвинул первую гипотезу о контроле моторики. Эта гипотеза, названная сервогипотезой, постулировала определенный физиологический сигнал как управляющую переменную в производстве произвольных движений. Согласно сервогипотезе Мертона, сигналы к системе гамма-мотонейронов устанавливали желаемую длину мышцы, а тонический рефлекс растяжения действовал на то, чтобы обеспечить достижение закодированной длины независимо от внешней нагрузки и ее возможных изменений. Другими словами, сервогипотеза предполагала, что тонический рефлекс растяжения был совершенным сервомеханизмом, контролирующим длину. К несчастью для этой гипотезы, дальнейшие эксперименты не подтвердили ее основных предположений, таких как очень высокий коэффициент усиления петли тонического рефлекса растяжения (Мэтьюз 19).70; Vallbo 1970) и более ранней активации гамма-мотонейронов по сравнению с альфа-мотонейронами при инициации движения (Vallbo 1971).
В конце первой половины XX -го -го века Питер Мэтьюз (1959) опубликовал классическую работу, посвященную изучению тонического рефлекса растяжения у децеребрированной кошки. В частности, Мэтьюз показал, что фиксированный нисходящий вход в спинной мозг (фиксированный уровень стимуляции нисходящих путей) связан не с фиксированной длиной, или фиксированной силой, или фиксированным уровнем активации, а с устойчивым отношением между мышечной силой и длиной, в то время как мышечная активация менялась параллельно силе. Изменение уровня стимуляции приводило к сдвигу сило-длинных характеристик по оси длины. Другими словами, мышцы вели себя как нелинейные пружины нулевой длины, зависящие от нисходящих сигналов. Эти исследования были непосредственными предшественниками экспериментов Фельдмана, приведших к формулировке ЭП-гипотезы (Фельдман 19).66). В этих экспериментах Фельдман не децеребрировал людей, а просил их «не вмешиваться», предполагая, что эта инструкция приводит к неизменной команде спуска. Он наблюдал наборы характеристик угла сустава для локтевого сустава, которые были подобны характеристикам сила-длина в исследовании Мэтьюза. В частности, изменение исходного состояния (требовавшее другой команды спуска) было связано со сдвигом суставно-угловой характеристики по оси угла.
В частности, Мэтьюз показал, что фиксированный нисходящий вход в спинной мозг (фиксированный уровень стимуляции нисходящих путей) связан не с фиксированной длиной, или фиксированной силой, или фиксированным уровнем активации, а с устойчивым отношением между мышечной силой и длиной, в то время как мышечная активация менялась параллельно силе. Изменение уровня стимуляции приводило к сдвигу сило-длинных характеристик по оси длины. Другими словами, мышцы вели себя как нелинейные пружины нулевой длины, зависящие от нисходящих сигналов. Эти исследования были непосредственными предшественниками экспериментов Фельдмана, приведших к формулировке ЭП-гипотезы (Фельдман 19).66). В этих экспериментах Фельдман не децеребрировал людей, а просил их «не вмешиваться», предполагая, что эта инструкция приводит к неизменной команде спуска. Он наблюдал наборы характеристик угла сустава для локтевого сустава, которые были подобны характеристикам сила-длина в исследовании Мэтьюза. В частности, изменение исходного состояния (требовавшее другой команды спуска) было связано со сдвигом суставно-угловой характеристики по оси угла.
Гипотеза точки равновесия основана на нескольких основных принципах. Некоторые из них, такие как принцип относительности Галилея, уже упоминались. Другой связан со строением нервно-мышечной системы, а именно с ее пороговым характером. Как показал Мэтьюз (1959), изменения нисходящих сигналов к сегментарному аппарату позвоночника можно описать как установку пороговых значений длины мышцы для тонического рефлекса растяжения. Если длина мышцы ниже этого порога, мышца молчит. Если она выше порога, мышца активируется, и уровень активации растет с разницей между фактической длиной мышцы и пороговым значением. Эта активация приводит к сокращению (укорочению) мышцы, приближая ее длину к пороговому значению.
Другими словами, разница между пороговым положением, определяемым в основном нисходящими сигналами, и фактическим положением (воспринимаемым проприорецепторами) приводит к активации мотонейронов и иннервируемых ими мышечных волокон. Эти нервные и мышечные элементы взаимодействуют друг с другом и с окружающей средой посредством как механики, так и нейронных петель.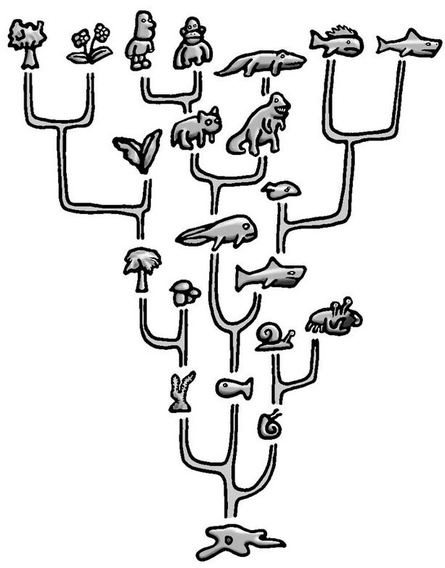 Эти взаимодействия имеют тенденцию снижать активность мотонейронов и минимизировать разницу между фактическим положением и пороговым положением. Таким образом, все мышцы пытаются достичь минимальной активации, совместимой с внешними силами, в том числе создаваемыми другими мышцами. Это можно рассматривать как принцип минимального конечного действия (двоюродный брат принципа минимального взаимодействия; Гельфанд, Цетлин, 1966). В реальном мире изменения длины мышц ограничиваются анатомией тела и его взаимодействием с окружающей средой. В результате в состоянии равновесия некоторые мышцы обычно демонстрируют ненулевой уровень активации.
Эти взаимодействия имеют тенденцию снижать активность мотонейронов и минимизировать разницу между фактическим положением и пороговым положением. Таким образом, все мышцы пытаются достичь минимальной активации, совместимой с внешними силами, в том числе создаваемыми другими мышцами. Это можно рассматривать как принцип минимального конечного действия (двоюродный брат принципа минимального взаимодействия; Гельфанд, Цетлин, 1966). В реальном мире изменения длины мышц ограничиваются анатомией тела и его взаимодействием с окружающей средой. В результате в состоянии равновесия некоторые мышцы обычно демонстрируют ненулевой уровень активации.
Начнем с одной мышцы. Его стационарное состояние можно описать двумя переменными: длиной и силой (). Управляющий сигнал (λ) задает порог тонического рефлекса растяжения, т.е. зависимость между активной мышечной силой и длиной, подобную наблюдаемой Мэтьюзом зависимости. Действительная мышечная сила и длина зависят как от λ, так и от внешней нагрузки (L равно ). Если мышца находится в точке равновесия (EP 1 ), действующей против нагрузки L, величина ее силы равна L. Любое отклонение мышцы от этой точки приведет к изменению ее активации таким образом, что активная мышечная сила будет выше, чем L (если мышца растянута) или ниже L (если мышца укорочена). Если после такого вынужденного изменения длины мышца освобождается, она возвращается к ЕР 1, поскольку другого состояния равновесия не существует. Механизмы, которые стремятся вернуть мышцу к ЕР 1 , представляют собой механизмы стабилизации позы, рассмотренные фон Холстом и Миттельштадтом (см. ранее).
Если мышца находится в точке равновесия (EP 1 ), действующей против нагрузки L, величина ее силы равна L. Любое отклонение мышцы от этой точки приведет к изменению ее активации таким образом, что активная мышечная сила будет выше, чем L (если мышца растянута) или ниже L (если мышца укорочена). Если после такого вынужденного изменения длины мышца освобождается, она возвращается к ЕР 1, поскольку другого состояния равновесия не существует. Механизмы, которые стремятся вернуть мышцу к ЕР 1 , представляют собой механизмы стабилизации позы, рассмотренные фон Холстом и Миттельштадтом (см. ранее).
Открыть в отдельном окне
Иллюстрация управления одной мышцей в рамках ВП-гипотезы. A: Центральная команда (λ) определяет характеристику сила-длина. При внешней нагрузке (L) возможна только одна точка равновесия (EP 1 ). Любые отклонения (закрашенные точки) от EP 1 приведут к возврату к EP 1 . B: Для выполнения активного движения требуется изменение λ (λ 1 на λ 2 ). В результате новая точка равновесия (ЭП 2 ), и происходит движение к EP 2 . C: Движения могут происходить пассивно в результате изменения нагрузки (от L 1 до L 2 ).
В результате новая точка равновесия (ЭП 2 ), и происходит движение к EP 2 . C: Движения могут происходить пассивно в результате изменения нагрузки (от L 1 до L 2 ).
Изображение теперь, когда кривая сила-длина смещена (от λ 1 до λ 2 в ). Предыдущая точка равновесия, EP 1 , больше не является точкой равновесия. Это отклонение от вновь установленной точки равновесия, EP 2 . Те же механизмы стабилизации позы, которые раньше возвращали мышцы в EP 9.0949 1 теперь склоняюсь к переносу на EP 2 . Таким образом, стабилизация позы и производство движений являются двумя периферийными следствиями одного и того же центрального механизма, полностью согласующимися с принципом референции.
Теперь представьте, что центральная команда осталась неизменной (λ 1 ), но нагрузка изменилась с L 1 на L 2 (как в ). Предыдущая точка равновесия становится неравновесной, и происходит движение к новой точке равновесия (EP 2 ), где активная сила мышцы уравновешивает внешнюю нагрузку.
Панели B и C иллюстрируют, что в рамках EP-гипотезы движения могут быть результатом двух причин. Движение может быть следствием изменения внешней нагрузки, при этом человек не меняет произвольную команду мышце. Изменение нагрузки при сохранении постоянной команды приводит к новой комбинации мышечной силы и длины по той же кривой сила-длина, движение, которое можно рассматривать как «непроизвольное». Движение может вызываться также изменением порога тонического рефлекса растяжения (изменение λ). Поскольку λ находится под контролем ЦНС, такие движения можно назвать «произвольными».
Эту схему довольно легко обобщить на сустав, управляемый двумя мышцами, создающими крутящий момент в противоположных направлениях, например мышцей-сгибателем и мышцей-разгибателем. иллюстрирует кривые тонического рефлекса растяжения для пары мышц с противоположными действиями с использованием другой пары механических переменных, крутящего момента и угла, которые более подходят для описания вращательных действий. Каждая мышца управляется своей собственной командной переменной, λ f для мышц-сгибателей и λ e 9.0950 для разгибателей. {λ f ; Пара λ e } определяет общую характеристику соединения, показанную жирной линией в . Равновесное состояние соединения и его механическое поведение также будут зависеть от внешнего крутящего момента. Например, если на соединение действует постоянный внешний крутящий момент (Tq in ), система будет находиться в равновесии при сочетании значений крутящего момента и угла {T 0 , α 0 }.
Каждая мышца управляется своей собственной командной переменной, λ f для мышц-сгибателей и λ e 9.0950 для разгибателей. {λ f ; Пара λ e } определяет общую характеристику соединения, показанную жирной линией в . Равновесное состояние соединения и его механическое поведение также будут зависеть от внешнего крутящего момента. Например, если на соединение действует постоянный внешний крутящий момент (Tq in ), система будет находиться в равновесии при сочетании значений крутящего момента и угла {T 0 , α 0 }.
Открыть в отдельном окне
Управление соединением может быть описано двумя переменными, λ f и λ e на плоскости крутящий момент-угол. Совместная характеристика крутящего момента-угла (толстые линии) будет представлять собой алгебраическую сумму соответствующих характеристик мышц. A: Сдвиги λ f и λ e в одном и том же направлении приводят к смещению характеристики соединения параллельно оси угла и могут быть связаны с обратной командой (r). Сдвиги λ f и λ e в противоположные стороны приводят к изменению наклона совместной характеристики и могут быть связаны с коактивационной командой (в).
Сдвиги λ f и λ e в противоположные стороны приводят к изменению наклона совместной характеристики и могут быть связаны с коактивационной командой (в).
Произвольное движение сустава и/или создание крутящего момента в результате смещения двух ls. Легко заметить, что если обе λ f и λ e смещаются в одном и том же направлении вдоль оси угла, то механическая характеристика всего сустава, представляющая собой алгебраическую сумму характеристик двух мышц, смещается параллельно себя вдоль оси угла без изменения своей формы (). Этот способ контроля можно рассматривать как попытку активировать одну мышцу и расслабить ее антагонист. С другой стороны, если λ f и λ e смещаются в противоположных направлениях, мало меняется положение совместной характеристики, но сильно меняется ее наклон (). Это не сильно сдвинет сустав, но «закрепит» его. Для явного отражения этих двух режимов совместного управления была использована другая пара переменных, эквивалентная {λ f ; λ e } пара. Эти переменные были названы реципрокной командой, r, и коактивационной командой, c (Фельдман, 1980, 19).86). Их можно определить как r = (λ f + λ e )/2; с = (λ f — λ e )/2.
Эти переменные были названы реципрокной командой, r, и коактивационной командой, c (Фельдман, 1980, 19).86). Их можно определить как r = (λ f + λ e )/2; с = (λ f — λ e )/2.
Чтобы сделать шаг к многосуставным движениям и движениям всего тела, необходимо ввести понятие эталонной конфигурации. Это понятие было введено группой Анатоля Фельдмана в качестве управляющей переменной на высоком уровне иерархии управления, участвующей в производстве естественных многосуставных движений (Фельдман и Левин, 1995; Фельдман и др., 2007). Эталонная конфигурация определяет во внешнем пространстве конфигурацию, при которой все мышцы достигли бы минимального уровня активности – набор пороговых значений активации мышц. Внешние силы могут не позволить телу достичь текущей эталонной конфигурации; тогда разница между эталонной конфигурацией и фактической конфигурацией приведет к ненулевым мышечным активациям, что приведет к выработке силы против внешних сил.
А пока предположим, что гипотетический центральный контроллер может задавать значения ls для каждой мышцы и, соответственно, значения {r,c} для каждого сустава независимо от других факторов. При таком допущении управление мышцей можно адекватно описать функцией времени λ(t). Эту временную функцию можно рассматривать как управляющую переменную, подаваемую на сегментарный аппарат, управляющий мышцей, ее управляющую траекторию .
Если в любой момент времени t 0 текущее значение λ заморожено на λ(t 0 ), и системе позволяют достичь равновесия, она остановится в точке равновесия, соответствующей комбинации длины мышцы и силы (l EP , F EP ), определяемой как λ(t 0 ) и внешней нагрузки. Так, траектория управления λ(t) может быть связана с временной последовательностью точек равновесия EP(t) или равновесной траекторией . Обратите внимание, что по определению равновесная траектория включает изменения как длины, так и силы.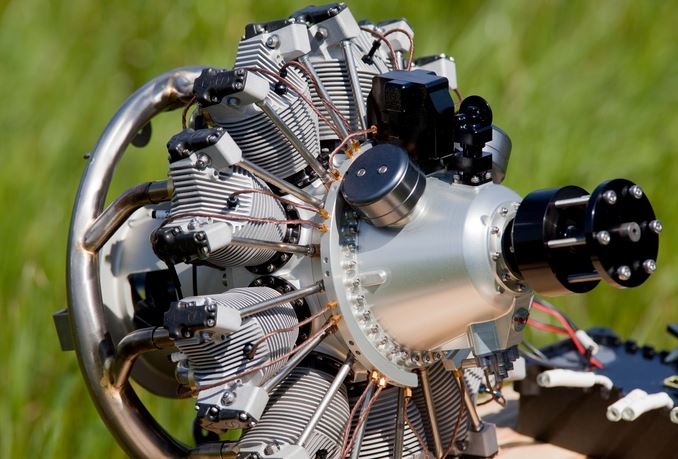
В то время как траектория управления предполагается заданной централизованно, возникает равновесная траектория, в которой не менее важную роль играет внешнее силовое поле. Например, если движение практикуется против постоянной внешней нагрузки, можно ожидать, что повторение одной и той же схемы управления (одной и той же траектории управления) приведет к той же траектории равновесия, но только если нагрузка не изменится. Создание одной и той же траектории управления при изменяющейся нагрузке приведет к другой траектории равновесия. Эта особенность использовалась в серии исследований по реконструкции временных закономерностей r(t) и c(t) с использованием внешних нагрузок, которые могли меняться плавно и неожиданно (Латаш, Готлиб 19).91; Латаш 1992).
Для данной равновесной траектории, действительной траектории , l(t) системы будет зависеть от многих факторов, которые можно объединить под не очень точным понятием динамики . К таким факторам относятся, в частности, внешнее силовое поле, механические свойства подвижных сегментов, временные задержки в рефлекторных дугах, вызывающие изменения активации мышц через петлю тонического рефлекса растяжения, особенности перехода от активации мышц к генерация силы и т.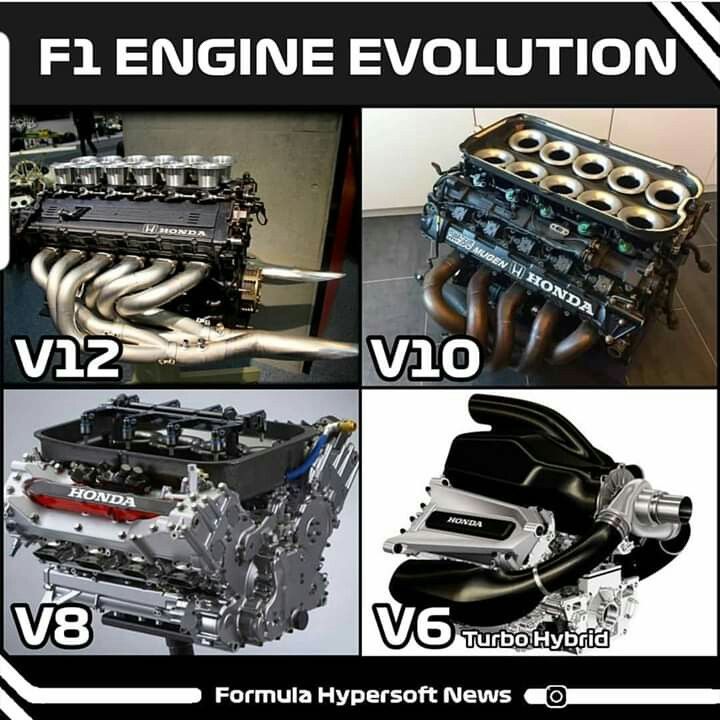 д.
д.
К сожалению, при нынешнем уровне экспериментальной сложности анализ временных характеристик управляющих переменных (например, λs) неуловим. Это связано с тем, что наблюдаемые переменные, такие как силы и перемещения, являются косвенными отражениями равновесных траекторий, которые, в свою очередь, являются косвенными отражениями функций λ(t). Даже в экспериментах с производством изометрической силы в предсказуемых условиях закономерности, наблюдаемые на уровне механических элементарных переменных, нельзя рассматривать как адекватное отражение некоторых гипотетических закономерностей на уровне управляющих переменных: даже если во время действия по производству изометрической силы не происходит явного движения, Активация мышц приводит к укорочению мышечных волокон и удлинению сухожилий, так что общая длина комплекса мышца + сухожилие остается неизменной, в то время как длина мышцы фактически изменяется. Кроме того, активация мышц сопровождается активацией гамма-системы, изменяющей чувствительность чувствительных окончаний веретена как к длине, так и к скорости мышцы. Поскольку окончания веретена являются основным источником рефлекторных эффектов, ожидается, что рефлекторный вклад в активацию мышц изменится даже в изометрических условиях.
Поскольку окончания веретена являются основным источником рефлекторных эффектов, ожидается, что рефлекторный вклад в активацию мышц изменится даже в изометрических условиях.
Было предпринято несколько попыток восстановить временные изменения λs (или пар {r,c}) во время естественных воздействий (Латаш и Готтлиб, 1991; Латаш, 1992, 1994; Гоми и Кавато, 1996). Однако все эти исследования использовали упрощенные механические модели подвижных сегментов и, следовательно, дали сомнительные результаты (см. Gribble et al., 1998).
Другой подход к определению λ(t) или эталонных конфигураций основан на анализе электромиографических паттернов больших групп мышц (Фельдман и др. 19).98; Лестьенн и др. 2000). Этот подход основан на следующей идее. Из-за гравитационного поля, обеспечивающего ненулевую внешнюю нагрузку при большинстве действий, реальные конфигурации суставов при естественных движениях редко совпадают с эталонными конфигурациями, что приводит к ненулевой активации определенных групп мышц.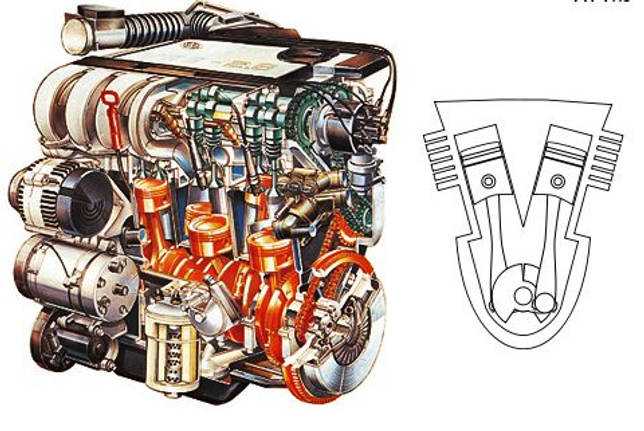 Однако при быстром движении с разворотом можно ожидать, что в какой-то момент времени подвижная фактическая конфигурация совпадет с подвижной эталонной конфигурацией. Если это произойдет, можно ожидать, что все мышцы, участвующие в действии, одновременно продемонстрируют минимальный уровень своей активации. Такие глобальные минимумы мышечной активности действительно наблюдались в цитируемых исследованиях. Однако даже этот метод предлагает только косвенный метод определения эталонной конфигурации только в одной (или нескольких) точках во время движения.
Однако при быстром движении с разворотом можно ожидать, что в какой-то момент времени подвижная фактическая конфигурация совпадет с подвижной эталонной конфигурацией. Если это произойдет, можно ожидать, что все мышцы, участвующие в действии, одновременно продемонстрируют минимальный уровень своей активации. Такие глобальные минимумы мышечной активности действительно наблюдались в цитируемых исследованиях. Однако даже этот метод предлагает только косвенный метод определения эталонной конфигурации только в одной (или нескольких) точках во время движения.
Недавно был разработан новый взгляд на синергизм, основанный на принципе изобилия (Гельфанд и Латаш, 1998). В соответствии с этим принципом, когда нейроконтроллер сталкивается с задачей, включающей большое количество элементов, он не ищет единичных решений, а организует взаимодействие между элементами таким образом, чтобы возникали семейства решений, все из которых способны выполнить задачу. (рассмотрено в Latash et al. 2002, 2007).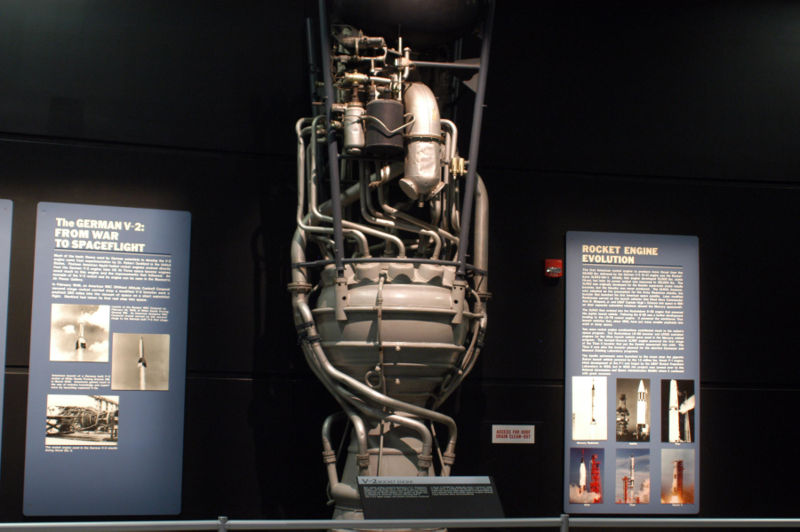 Свобода выбора решений из большого набора позволяет контроллеру справляться с возможными возмущениями или выполнять другие задачи одновременно, используя тот же набор элементов (например, Zhang et al. 2008).
Свобода выбора решений из большого набора позволяет контроллеру справляться с возможными возмущениями или выполнять другие задачи одновременно, используя тот же набор элементов (например, Zhang et al. 2008).
В отношении управления отдельной мышцей ВП-гипотезу можно рассматривать как частный пример многоэлементной синергии, в которой моторные единицы играют роль элементов, а общее поведение мышц (например, уровень активации или активная мышечная сила или положение сустава), играющие роль переменных задачи. Механизм тонического рефлекса растяжения является примером системы обратной связи, которая регулирует скорость генерации потенциала действия отдельными двигательными единицами, стабилизируя общий уровень мышечной активации. Например, если прекращается возбуждение одной двигательной единицы, уровень мышечной активации падает, баланс сил нарушается таким образом, что мышца растягивается от внешней нагрузки, мышечные веретена проявляют повышенную активность, тонический рефлекс растяжения вызывает большее возбуждение.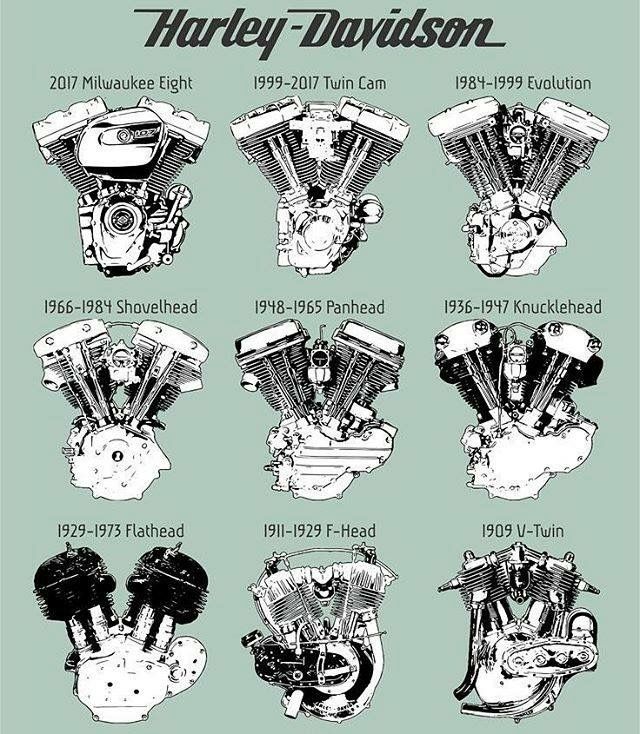 пула мотонейронов, и все мотонейроны увеличивают скорость своей импульсации (и/или рекрутируются новые мотонейроны), тем самым компенсируя последствия первоначальной проблемы (одна двигательная единица перестала работать).
пула мотонейронов, и все мотонейроны увеличивают скорость своей импульсации (и/или рекрутируются новые мотонейроны), тем самым компенсируя последствия первоначальной проблемы (одна двигательная единица перестала работать).
Можно ли этот подход обобщить на управление многоэффекторными системами. Для этого необходимо использовать введенное ранее понятие эталонной конфигурации. Если понимать понятие эталонной конфигурации не как детальную конфигурацию всех сегментов тела (всех его кинематических степеней свободы), а как комбинацию пороговых положений только важных точек (Пилон и др., 2007) , это понятие предлагает очень привлекательную основу для рассмотрения двигательной синергии на уровне контроля. Предположим иерархическую систему управления, в которой на каждом уровне иерархии система избыточна, то есть выдает больше выходных переменных, чем количество ограничений, заданное входными переменными (). Если контроллер заботится только об определенных характеристиках двигательного действия, другим характеристикам может быть разрешено варьироваться на основе некоторых второстепенных соображений, возможно, отражающих оптимизацию определенных характеристик производительности.
Открыть в отдельном окне
Иллюстрация гипотетической иерархии многосуставного движения. Команда для желаемого движения конкретной точки тела (например, конечной точки многосуставной конечности) может быть связана с командой {R,C}. Он формирует входные данные для синергии, используя команды {r,c} для отдельных суставов в качестве элементарных переменных. Каждая пара {r,c} является входом в мультимышечную синергию с λs в качестве элементарных переменных.
Например, во время многосуставного движения часто траектория конечной точки рассматривается как важная переменная производительности. В частности, это предположение было использовано Gribble и Ostry (2000) в элегантной модели адаптации движения к зависящим от скорости внешним силовым полям, основанной на EP-гипотезе. Предположим, что ЦНС организует обратную связь по положению конечной точки и использует эту обратную связь для создания временного профиля выходной переменной, которая будет использоваться в качестве входных данных для следующего, иерархически более низкого уровня управления, например уровня отдельных суставов. В каждый момент времени CNS задает пороговые значения местоположения конечной точки, и несоответствие между эталонным местоположением конечной точки и ее фактическим местоположением приводит к выходу этого самого высокого уровня иерархии. Эти сигналы служат входными данными для следующего уровня управления, который будет управлять эталонными траекториями на совместном уровне.
Поскольку система избыточна, эталонная траектория на более высоком иерархическом уровне не определяет однозначно все эталонные траектории на более низком уровне. Появление конкретных эталонных траекторий более низкого уровня может быть основано на механизме обратной связи (например, Тодоров и Джордан, 2002; Латаш и др., 2005) или на механизме прямой связи (например, Гудман и Латаш, 2006). Таким образом, иерархия уровней управления, где каждый уровень функционирует на основе принципа управления ВП, кажется вероятной структурой управления, ведущей к двигательной синергии.
Проблема немного усложняется, если нужно включить возможность совместного сокращения мышц без изменения конфигурации конечностей. Косокращение — важный механизм моторного контроля, отражаемый на односуставном уровне специальной командой — с-командой. Люди могут легко сокращать мышцы, не меняя положения сустава. Предположим, что состояние конечной точки многосуставной конечности может быть описано двумя командами, одна из которых определяет его положение равновесия (R), а другая определяет его устойчивость относительно положения равновесия (C) – эквивалентно паре {r,c} команд, введенных в рамках ВП-гипотезы. Пара {R, C} отображает команды, отправленные отдельным суставам; управление относительно простым шарниром с одной кинематической степенью свободы можно описать парой {r,c}. Если большое количество суставов определяет состояние конечной точки, можно ожидать, что синергия нескольких {r,c} стабилизирует требуемые значения R и C. Большинство суставов человека, включая относительно простые (такие как локтевой сустав), пересекается более чем двумя мышцами. Следовательно, чтобы определить пару {r,c}, контроллер должен упорядочить набор значений λ для всех мышц. Это еще одна типичная проблема избыточности, и имеет смысл предположить, что контроллер организует мульти-λ-синергию, стабилизирующую требуемые значения пары {r,c}.
ВП-гипотеза была выдвинута в середине 1960-х -го года, во время активных исследований и крупных открытий в области нейрофизиологии, в частности спинного мозга. Эти исследования легли в основу господствовавшего мнения о том, что ЦНС очень сложна и не может быть понята без тщательного анализа всех составляющих ее нервных путей. Напротив, EP-гипотеза предполагала, что нервный контроль мышцы можно описать только одной переменной, λ. Многие заслуженные исследователи отмахнулись от него как от чего-то, о чем не стоит спорить, что-то слишком упрощенное и формальное для описания нейронных процессов в очень-очень сложном человеческом теле. Очень мало статей было опубликовано Анатолием Фельдманом и его коллегами за первые 10 лет существования ВП-гипотезы, отчасти потому, что журналы в СССР, контролируемые истеблишментом, не принимали рукописи, излагающие столь нетрадиционный взгляд на управление движениями.
После того, как гипотеза ВП просочилась сквозь железный занавес на Запад, она привлекла внимание нескольких выдающихся исследователей, включая Эмилио Биззи, Питера Грина, Скотта Келсо, Ричарда Шмидта и Майкла Терви (Келсо и Холт, 1980; Келсо и др., 1980). ; Шмидт и Макгоун, 1980; Биззи и др., 1982; Грин, 1982;). Однако многие другие отнеслись к этой гипотезе с подозрением. Его первоначальная формулировка создавала впечатление модели масса-пружина, которая, казалось, имела ограниченное применение, может быть, только к постуральным задачам, очень медленным движениям и только к механическим переменным. В то время общий образец критики был следующим: EP-гипотеза не может объяснить a, b и c на основании того факта, что ни одна публикация не рассматривала a, b или c в рамках EP-гипотезы (a, б, в могут быть паттерны ЭМГ, быстрые движения, двигательная вариабельность, многосуставные движения, двигательные расстройства, различия в мышечной активации при изотонических движениях и изометрических сокращениях, действие биартикулярных мышц и др. ). Исследователи, высказавшие эту критику, не осознавали, что ВП-гипотеза была разработана только одним человеком, Анатолием Фельдманом, при спорадической помощи горстки коллег. Только в 1980 th и 1990 th , ответы на большинство из этих вопросов были получены, показывая, что ВП-гипотеза действительно может иметь дело с этими явлениями (обзор в Latash 1993).
Дополнительная путаница была добавлена формулировкой альфа-модели, основанной на серии ставших уже классическими экспериментов на деафференцированных обезьянах, демонстрирующих существование равновесной траектории (Полит и Биззи, 1978, 1979; Биззи и др., 1982). Деафферентация гарантировала, что обезьяны не чувствуют возмущений и, следовательно, не реагируют на них — важное условие, если мы хотим реконструировать характеристики торсионно-углового сустава. Однако деафферентация также устранила тонический рефлекс растяжения, который является ключевым элементом гипотезы ВП Фельдмана. Обезьяны научились двигаться в отсутствие тонического рефлекса растяжения; однако они, вероятно, использовали другой способ управления, адекватный новому состоянию их спинного мозга. Единственным механизмом, доступным деафферентным обезьянам, была прямая активация пулов альфа-мотонейронов, приводящая к паттернам активации мышц, которые не зависели от длины мышц (в отличие от интактной системы). Конечности по-прежнему вели себя как внезапные из-за вязкоупругих свойств мышц с учетом уровня их активации, что позволяло оценивать состояния равновесия и траектории. Обратите внимание, однако, что гипотетическая контрольная переменная изменилась с λ (как в исходной формулировке Фельдмана, иногда называемой λ-моделью) на α (уровень активации пула альфа-мотонейронов). Эта путаница все еще присутствует в некоторых публикациях (например, Shadmehr and Wise 2005).
В последнее время стало модным опровергать ЕР-гипотезу. Таких заявлений было много. Типичная схема такова: принимается упрощенный вариант гипотезы, делаются предсказания, они фальсифицируются в экспериментах и делается вывод о неверности гипотезы. На самом деле ошибочна только упрощенная версия. Точнее, показано, что упрощенная версия имеет ограниченный диапазон применимости, тогда как эксперимент вышел за этот диапазон. Заявления об опровержении ВП-гипотезы были основаны на таких выводах, как нарушение эквифинальности (Лакнер и Дизио 1994; Hinder и Milner 2003), недостаточная жесткость суставов (Popescu et al. 2003), сложные модели равновесных траекторий (Gomi and Kawato 1996) и все вышеперечисленное вместе (Gottlieb 1998). Действительно, большинство этих результатов можно интерпретировать в рамках EP-гипотезы (Feldman, Latash, 2005). Например, эквифинальность (попадание в одно и то же конечное положение при приложении нестационарного возмущения) ожидается от управления ЭП только при нестационарных изменениях нагрузки, не сопровождающихся изменениями управляющих переменных и ни на одном из этапов преобразования электрических сигналов к мышцам в силы. В большинстве исследований тугоподвижности суставов использовались сомнительные методы и модели (подробный обзор см. в Latash and Zatsiorsky 19).93).
Особый вид критики состоит в том, что EP-гипотеза не может быть опровергнута. Как уже упоминалось, ВП-гипотеза сложна; это не одно заявление. Например, физический принцип управления механическими системами с позиционно-зависимыми приводами (мышцами) действительно неопровержим. Физиологическая реализация этого принципа в человеческом теле весьма спорна. На самом деле около 15 лет назад группа исследователей из Лаборатории Джерри Готтлиба сделала предсказания в отношении того или иного эксперимента. Эти предсказания были изложены на бумаге и подписаны участниками. Затем один из исследователей вернулся в свою родную Югославию (она существовала еще в те далекие времена!) и провел исследование. Гипотеза ВП давала более точные предсказания, чем гипотеза двойной стратегии, основанная на центральном контроле всего пресинаптического входа в альфа-мотонейронные пулы, так называемом «импульсе возбуждения» (Jaric et al. 19).94; также см. Ilic et al. 1996).
Итак, есть ли альтернативы ЭП-гипотезе? Нет и да. Нет в том смысле, что физический принцип, лежащий в основе EP-гипотезы, не оставляет места для альтернатив. Да, в том смысле, что физиологические механизмы, реализующие этот физический принцип, неизвестны, и современные взгляды на эти механизмы могут быть ошибочными.
Развитие научных гипотез в решающей степени зависит от развития новых экспериментальных подходов. В настоящее время ЭП-гипотеза остро нуждается в экспериментальных средствах, позволяющих измерять (реконструировать) гипотетические управляющие сигналы λ(t) или {r(t),c(t)}. Ряд более ранних попыток реконструировать равновесные траектории (Латаш и Готлиб 1991; Латаш 1992; Gomi and Kawato, 1996) справедливо критиковали за использование недостаточно грубых моделей периферической нейромоторной системы (Gribble et al., 1998). Однако за последние годы не было разработано никаких новых методов. В результате спорные N-образные равновесные траектории не имеют надежно фиксируемой альтернативы. Пока мы не получим хорошие «лямбда-метры», экспериментальное обоснование ЭП-гипотезы останется ограниченным конкретными условиями (например, стационарными состояниями), для которых наличие надежной динамической модели движущейся системы не имеет решающего значения.
Что касается теоретического развития гипотезы ВП, то она предлагает уникальную привлекательную основу для объединения вопросов управления и координации для многоэлементных систем (как кратко описано в предыдущем разделе). Изучение многоуровневых иерархий, вовлеченных в производство естественных движений, и анализ межуровневых взаимодействий являются новыми интересными направлениями исследований, предлагаемыми перекрестным обогащением ВП-гипотезы и недавним развитием понятия двигательной синергии. В частности, в рамках гипотезы неуправляемого многообразия (гипотеза UCM; Scholz and Schöner 1999; рассмотрено в Latash et al. 2007) до сих пор использовался для анализа потенциальных синергий в пространствах кинетических, кинематических и электромиографических переменных. Расширение этого метода для управления переменными, такими как пары λs или {r,c}, было бы важным шагом на пути к пониманию природы синергии.
С момента своего зарождения ВП-гипотеза всегда была глубоко укоренена в нейрофизиологии. Однако количество нейрофизиологических исследований, проверяющих происхождение управляющих сигналов и механизмы их преобразования в механические переменные, ограничено. Идея Фельдмана о том, что λ может быть связана с подпороговой деполяризацией пулов альфа-мотонейронов (например, Feldman 1986) — единственный нейрофизиологический механизм, предложенный до сих пор для опосредования принципа контроля ВП, механизм, который имеет лишь ограниченную экспериментальную поддержку.
Гипотеза ВП также может быть применена к анализу двигательных нарушений и эффектов двигательной реабилитации. Однако таких исследований немного. Они включают моделирование движений при дистонии в рамках ВП-гипотезы (Latash, Gutman, 1994) и гипотезы происхождения спастичности, рассматривающей ее как нарушение контроля над сдвигами мышечно-силовых характеристик (Levin, Feldman 19).94; Джобин и Левин, 2000). Как и в других областях, медленный прогресс в значительной степени связан с отсутствием надежных методов измерения гипотетических контрольных переменных, таких как {r, c}.
Я хотел бы закончить этот обзор на оптимистичной ноте. В настоящее время ВП-гипотеза рассматривается большинством исследователей в области моторного контроля как ведущая гипотеза в этой области. Несмотря на относительно небольшое количество исследователей, активно разрабатывающих ВП-гипотезу, ее успехи весьма впечатляющи. Было показано, что он предлагает продуктивную основу для анализа различных явлений (включая двигательную изменчивость, двигательное обучение и двигательные расстройства) в различных пространствах (кинетическом, кинематическом и электромиографическом). Есть много интересных вопросов без ответов, и всем предлагается присоединиться к поиску понимания нейронного управления движениями, используя единственную гипотезу, которая имеет интуитивный смысл и имеет глубокие основания как в физике, так и в физиологии.
Частично поддерживается грантами NIH NS-035032 и AG-018751. Автор очень благодарен доктору Гжегожу Юрасу и его коллегам за приглашение принять участие в серии конференций «Управление двигателем» в Польше, результатом одной из которых стала эта статья.
- Бернштейн Н.А. Проблема взаимосвязи координации и локализации. Архив биологической науки. 1935; 38: 1–35. на русском. [Google Scholar]
- Бернштейн Н.А. О построении движений. Медгиз; Москва: 1947. на русском языке. [Google Scholar]
- Бернштейн Н.А. Координация и регуляция движений. Пергамон Пресс; Oxford: 1967. [Google Scholar]
- Бернштейн Н.А. Современные исследования физиологии нервных процессов. Смысл; Москва, Россия: 2003. [Google Scholar]
- Биззи Э. , Аккорнеро Н., Чаппл В., Хоган Н. Формирование траектории руки у обезьян. Экспериментальное исследование мозга. 1982; 46: 139–143. [PubMed] [Google Scholar]
- Feldman AG. Функциональная настройка нервной системы с контролем движения или поддержанием устойчивой позы. II. Контролируемые параметры мышцы. Биофизика. 1966;11:565–578. [Google Scholar]
- Feldman AG. Суперпозиция моторных программ. I. Ритмические движения предплечья у человека. Неврология. 1980; 5: 81–90. [PubMed] [Google Scholar]
- Feldman AG. Еще раз о гипотезе точки равновесия (λ-модели) для моторного управления. Журнал моторного поведения. 1986; 18:17–54. [PubMed] [Google Scholar]
- Фельдман А.Г., Адамович С.В., Острый Д.И., Фланаган И.Р. Происхождение электромиограмм — объяснения, основанные на гипотезе точки равновесия. В: Winters IM, Woo SL-Y, редакторы. Множественные мышечные системы. Спрингер; Берлин, Гейдельберг, Нью-Йорк: 1990. стр. 195–312. [Google Scholar]
- Фельдман А. Г., Гусев В., Санголе А., Левин М.Ф. Пороговое управление положением и принцип минимального взаимодействия в двигательных действиях. Прогресс в исследованиях мозга. 2007; 165: 267–281. [PubMed] [Google Scholar]
- Фельдман А.Г., Латаш М.Л. Проверка гипотез и развитие науки: недавние попытки фальсифицировать гипотезу точки равновесия. Экспериментальное исследование мозга. 2005; 161:91–103. [PubMed] [Google Scholar]
- Фельдман А.Г., Левин М.Ф. Позиционные системы отсчета в управлении двигателем: их происхождение и использование. Поведенческие и мозговые науки. 1995;18:723–806. [Google Scholar]
- Фельдман А.Г., Левин М.Ф., Митницкий А.М., Аршамбо П. Основная лекция Конгресса ISEK, 1998 г.: Мультимышечный контроль движений человека. Журнал электромиографии и кинезиологии. 1998; 8: 383–390. [PubMed] [Google Scholar]
- Гельфанд И.М., Латаш М.Л. К проблеме адекватного языка в науке о движении. Блок управления двигателем. 1998; 2: 306–313. [PubMed] [Google Scholar]
- Гельфанд И. М., Цетлин М.Л. О математическом моделировании механизмов центральной нервной системы. В: Гельфанд И.М., Гурфинкель В.С., Фомин С.В., Цетлин М.Л., ред. Модели структурно-функциональной организации некоторых биологических систем. Наука; Москва: 1966. С. 9–26. (1966) (на русском языке перевод имеется в издании MIT Press: Cambridge MA. 1971 г.) [Google Scholar]
- Gibson JJ. Экологический подход к зрительному восприятию. Хоутон Миффлин; Boston, MA: 1979. [Google Scholar]
- Gomi H, Kawato M. Гипотеза точки равновесия, проверенная путем измерения жесткости руки во время многосуставного движения. Наука. 1996; 272:117–120. [PubMed] [Google Scholar]
- Goodman SR, Latash ML. Упреждающее управление резервной моторной системой. Биологическая кибернетика. 2006;95: 271–280. [PubMed] [Google Scholar]
- Gottlieb GL. Отказ от гипотезы точки равновесия. Блок управления двигателем. 1998; 2:10–12. [PubMed] [Google Scholar]
- Готлиб Г.Л., Коркос Д.М., Агарвал Г.К. , Латаш М.Л. Принципы, лежащие в основе стратегий односуставных движений. В: Winters JM, Woo SL-Y, редакторы. Множественные мышечные системы: биомеханика и организация движения. Спрингер-Верлаг; Нью-Йорк и др.: 1990. стр. 236–250. [Google Scholar]
- Greene PH. Почему легко управлять руками? Журнал моторного поведения. 1982;4:260–286. [PubMed] [Google Scholar]
- Gribble PL, Ostry DJ. Компенсация нагрузок при движениях рук с помощью управления точкой равновесия. Экспериментальное исследование мозга. 2000; 135:474–482. [PubMed] [Google Scholar]
- Gribble PL, Ostry DJ, Sanguineti V, Laboissiere R. Требуются ли сложные управляющие сигналы для движений рук человека? Журнал нейрофизиологии. 1998; 79: 1409–1424. [PubMed] [Google Scholar]
- Hinder MR, Milner TE. Случай модели внутренней динамики в сравнении с контролем точки равновесия в движении человека. Журнал физиологии. 2003;549: 953–963. [Бесплатная статья PMC] [PubMed] [Google Scholar]
- Ilic DB, Corcos DM, Gottlieb GL, Latash ML, Jaric S. Влияние практики на воспроизведение движения: последствия для моделей управления двигателем. Наука о движении человека. 1996; 15:101–114. [Google Scholar]
- Ярич С., Коркос Д.М., Готлиб Г.Л., Илич Д.Б., Латаш М.Л. Влияние практики на расстояние движения и воспроизведение конечного положения: последствия для контроля точки равновесия движений. Экспериментальное исследование мозга. 1994;100:353–359. [PubMed] [Google Scholar]
- Джобин А., Левин М.Ф. Регуляция порога рефлекса растяжения сгибателей локтевого сустава у детей с церебральным параличом: новая мера спастичности. Медицина развития и детская неврология. 2000; 42: 531–540. [PubMed] [Google Scholar]
- Кавато М. Внутренние модели управления двигателем и планирования траектории. Текущие мнения в нейробиологии. 1999; 9: 718–727. [PubMed] [Google Scholar]
- Kelso JAS, Holt KG. Изучение анализа вибрационной системы производства движений человека. Журнал нейрофизиологии. 1980;43:1183–1196. [PubMed] [Google Scholar]
- Kelso JAS, Holt KG, Kugler PN, Turvey MT. О понятии координационных структур как диссипативных структур. II. Эмпирические линии сходимости. В: Стельмах Г.Э., Рекуин Дж., редакторы. Учебники по двигательному поведению. N.-Holland Publ.Co; Амстердам: 1980. С. 49–70. [Google Scholar]
- Лакнер Дж. Р., Ди Зио П. Быстрая адаптация к возмущениям силы Кориолиса траектории руки. Журнал нейрофизиологии. 1994; 72:1–15. [PubMed] [Академия Google]
- Латаш МЛ. Виртуальные траектории, тугоподвижность суставов и изменение собственной частоты при односуставных колебательных движениях. Неврология. 1992; 49: 209–220. [PubMed] [Google Scholar]
- Latash ML. Управление движением человека. кинетика человека; Урбана, Иллинойс: 1993. [Google Scholar]
- Latash ML. Реконструкция равновесных траекторий и паттернов жесткости суставов при односуставных произвольных движениях под разными инструкциями. Биологическая кибернетика. 1994; 71: 441–450. [PubMed] [Академия Google]
- Латаш М.Л., Готлиб Г.Л. Восстановление комплаентных характеристик локтевого сустава при быстрых и медленных произвольных движениях. Неврология. 1991; 43: 697–712. [PubMed] [Google Scholar]
- Латаш М.Л., Гутман С.Р. Аномальные двигательные паттерны в рамках гипотезы точки равновесия: причина дистонических движений? Биологическая кибернетика. 1994; 71: 87–94. [PubMed] [Google Scholar]
- Латаш М.Л., Шольц Дж.П., Шёнер Г. Стратегии контроля моторики, выявленные в структуре моторной вариабельности. Обзоры физических упражнений и спортивных наук. 2002; 30: 26–31. [PubMed] [Академия Google]
- Латаш М.Л., Шольц Дж.П., Шенер Г. На пути к новой теории двигательных синергий. Блок управления двигателем. 2007; 11: 275–307. [PubMed] [Google Scholar]
- Латаш М.Л., Шим Дж.К., Смилга А.В., Зациорский В. Гипотеза центральной обратной связи об организации моторных синергий: физическая метафора и нейронная модель. Биологическая кибернетика. 2005; 92: 186–191. [ЧВК бесплатная статья] [PubMed] [Google Scholar]
- Латаш М.Л., Зациорский В.М. Тугоподвижность суставов: миф или реальность? Наука о движении человека. 1993;12:653–692. [Google Scholar]
- Лестьен Ф.Г., Туллиер Ф., Аршамбо П., Фельдман А.Г., Левин М.Ф. Многомышечный контроль движений головы у обезьян: гипотеза референтной конфигурации. Неврологические письма. 2000; 283:65–68. [PubMed] [Google Scholar]
- Левин М.Ф., Фельдман А.Г. Роль регуляции порога рефлекса растяжения в нормальном и нарушенном двигательном контроле. Исследования мозга. 1994; 657: 23–30. [PubMed] [Google Scholar]
- Мэтьюз PBC. Зависимость напряжения от разгибания в рефлексе растяжения камбаловидной мышцы децеребрированной кошки. Журнал физиологии. 1959;47:521–546. [Бесплатная статья PMC] [PubMed] [Google Scholar]
- Matthews PBC. Происхождение и функциональное значение рефлекса растяжения. В: Andersen P, Jansen JKS, редакторы. Возбудительные синаптические механизмы. Университетский форлагет; Осло, Норвегия: 1970. стр. 301–315. [Google Scholar]
- Merton PA. Размышления о сервоуправлении движениями. В: Malcolm JL, Gray JAB, Wolstenholm GEW, редакторы. Спинной мозг. Литтл, Браун; Бостон: 1953. стр. 183–198. [Google Академия]
- Пилон Ж-Ф, Де Серрес С.Дж., Фельдман А.Г. Пороговый позиционный контроль движения руки с опережающим увеличением силы захвата. Экспериментальное исследование мозга. 2007; 181:49–67. [PubMed] [Google Scholar]
- Полит А, Биззи Э. Процессы, контролирующие движения рук у обезьяны. Наука. 1978; 201: 1235–1237. [PubMed] [Google Scholar]
- Polit A, Bizzi E. Характеристики двигательных программ, лежащих в основе движений рук у обезьян. Журнал нейрофизиологии. 1979; 42: 183–194. [PubMed] [Академия Google]
- Popescu FC, Hidler JM, Rymer WZ. Локтевой импеданс при целенаправленных движениях. Экспериментальное исследование мозга. 2003; 152:17–28. [PubMed] [Google Scholar]
- Шмидт Р.А. Теория схемы дискретного обучения двигательным навыкам. Психологические обзоры. 1975; 82: 225–260. [Google Scholar]
- Шмидт Р.А., МакГаун К. Предельная точность неожиданных быстрых движений с нагрузкой: свидетельство существования механизма масса-пружина в программировании. Журнал моторного поведения. 1980; 12: 149–161. [PubMed] [Академия Google]
- Scholz JP, Schöner G. Концепция неуправляемого многообразия: определение управляющих переменных для функциональной задачи. Экспериментальное исследование мозга. 1999; 126: 289–306. [PubMed] [Google Scholar]
- Шадмер Р., Уайз С.П. Вычислительная нейробиология достижения и указания. Массачусетский технологический институт Пресс; Кембридж, Массачусетс: 2005. [Google Scholar]
- Stuart DG, Pierce PA, Callister RJ, Brichta AM, McDonagh JC. Сэр Чарльз С. Шеррингтон : гуманист, наставник и нейробиолог движения. В: Латаш М.Л., Зациорский В.М., ред. Классика в науке о движении. кинетика человека; Урбана, Иллинойс: 2001. стр. 317–374. [Академия Google]
- Тодоров Э., Джордан М.И. Оптимальное управление с обратной связью как теория координации движений. Неврология природы. 2002; 5: 1226–1235. [PubMed] [Google Scholar]
- Валбо А. Паттерны разряда в афферентах мышечного веретена человека во время изометрических произвольных сокращений. Acta Physiologica Scandinavica. 1970; 80: 552–566. [PubMed] [Google Scholar]
- Vallbo AB. Реакция мышечного веретена в начале изометрических произвольных сокращений. Разница во времени между фузимоторным и скелетомоторным эффектами. Журнал физиологии. 1971;218:405–431. [Бесплатная статья PMC] [PubMed] [Google Scholar]
- Von Holst E, Mittelstaedt H. Daz reafferezprincip. Wechselwirkungen zwischen Zentralnerven-system und Peripherie. Натурвисс. 1950–1973; 37: 467–476. 1950. [Google Scholar]
Принцип повторной ссылки. В: Мартин Р., переводчик. Поведенческая физиология животных и человека. Сборник статей Эриха фон Хольста. Том. 1. Издательство Университета Майами; Корал-Гейблс, Флорида: стр. 139–173. [Google Scholar] - Ваххолдер К., Альтенбургер Х. У наших конечностей только одна длина покоя? Одновременно вклад в измерение сил упругости при активных и пассивных движениях. Pflüg Arch ges Physiol. 1927;215:627–640. [PubMed] [Google Scholar]
Цитируется по: Стернад Д. Основополагающие эксперименты для современных гипотез о контроле точки равновесия при произвольных движениях. Блок управления двигателем. 2002; 6: 299–318. [PubMed] [Google Scholar] - Wolpert DM, Miall RC, Kawato M. Внутренние модели мозжечка. Тенденции в когнитивной науке. 1998; 2: 338–347. [PubMed] [Google Scholar]
- Чжан В., Шольц Дж. П., Зациорский В. М., Латаш М. Л. Что дают синергии? Влияние вторичных ограничений на многозначные синергии в точных задачах производства силы. Журнал нейрофизиологии. 2008;99: 500–513. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Harley Davidson Расшифровка VIN. Объяснение последних 100 лет
Независимо от того, рыщете ли вы по стране в поисках редких мотоциклов или просто хотите узнать некоторую базовую информацию о мотоцикле, который вы видели на стоянке, понимая, как Harley-Davidson форматирует свои идентификационные номера автомобилей (обычно называемые как номера VIN) даст вам 411 именно того типа Harley, на который вы смотрите. С самого начала Harley маркировала свои двигатели уникальными серийными номерами, но эти ранние серийные номера не соответствовали какому-либо реальному стандарту до 19-го века.20-е годы. В этот момент Harley начал использовать легко расшифровываемую строку цифр и букв, которая использовалась до 1969 года. Для модели 1970 года Harley изменила свои номера VIN и в течение короткого десятилетнего периода использовала эту другую схему. Последнее изменение произошло в 1981 году, когда Национальная администрация безопасности дорожного движения обязала всех производителей транспортных средств использовать 17-значный VIN, и Harley перешла на этот новый стандарт, который они используют до сих пор.
Поиск VIN на мотоцикле Harley-Davidson
Прежде чем мы углубимся в детали расшифровки этих VIN-номеров, давайте начнем с того, где их найти. Если вы ищете машину 1969 года выпуска или старше, номер VIN будет находиться только на двигателе. Он будет выбит вручную на левой стороне корпуса двигателя, прямо под цилиндрами на приподнятом выступе. Важно отметить, что номер VIN не был проштампован на раме этих ранних моделей и что любые номера, найденные на раме, являются номерами отливки, которые были одинаковыми на каждой раме одной и той же модели/года. Начиная с 1970. Официальный номер VIN переместился на шейку рамы и с тех пор остается на этом месте. С 1970 по 1980 год Harley продолжал маркировать соответствующий VIN на двигателе (за исключением моделей начала 1979 года), чтобы двигатель можно было подобрать к раме. В 1981 году, когда Harley перешла на новый 17-значный стандарт VIN, они перестали проставлять соответствующий VIN на двигателе и начали использовать усеченную версию VIN на двигателе, которая по-прежнему позволяла сопоставлять двигатель с рамой, но использовала только 10. -цифры.
Номера VIN Harley-Davidson до 1970 года
Возвращаясь к 1920-м годам, мы видим, что Harley стандартизирует очень простой формат своих номеров VIN. До 1969 года VIN-номера Harley состояли из комбинации от 8 до 11 цифр и букв в следующем порядке:
- первые две цифры обозначали год производства
- следующие от одной до четырех букв обозначали модель
- последние четыре или пять цифры обозначают заводской номер
Рисунок 1. Номер VIN Harley-Davidson FLH 1964 года на двигателе
Далее, разбив номер VIN, мы обнаруживаем, что основная часть информации об отдельном мотоцикле содержится в буквах, следующих за датой производства. Первая буква, которую часто называют кодом двигателя, обозначает тип двигателя, первоначально установленного на заводе. Ниже приведен список кодов двигателей для двигателей Harley V-twin, произведенных Harley с 1920 по 1969 год. Обратите внимание, что до 1935, Harley также производила различные одноцилиндровые модели с кодами двигателей A, B и C, а также два горизонтально расположенных двухцилиндровых двигателя с кодами двигателей WJ и WF. Был еще один горизонтально-оппозитный двухцилиндровый двигатель, построенный в 1942 году и обозначенный буквами XA.
| 1920-1969 Коды двигателя V-TWIN | |
| Двигатель | ТИП |
| F | ДВИГАТЕЛЬ |
| F | ДВИГАТЕЛЬ |
| F | . 0022 |
| j | 61 ”или 74” F-головы V-TWIN |
| D | 45 ”боковой клапан V-TWIN |
| R | 45” Боковой клапан V-TWIN | 45 ”Боковой клапан V-TWIN | 45” Боковой клапан V-TWIN | 45 ”. V | 74” or 80” Side Valve V-Twin |
| W | 45” Side Valve V-Twin |
| G | 45” Side Valve V-Twin used in Servi-cars |
| U | Боковой клапан 74” или 80” V-Twin |
| K | 45” or 55” Side Valve V-Twin |
| E | 61” Overhead Valve V-twin |
| F | 74” Overhead Valve V-twin |
| X | 45 ” или 55” V-Twin с верхним расположением клапанов |
Хотя компания Harley проделала большую работу по присвоению различных буквенных обозначений каждому типу двигателей с боковыми клапанами, они начали перекрываться, когда они перешли на двигатели с верхним расположением клапанов для своих больших двойных моделей. Следовательно, вам действительно нужно знать диапазоны дат для различных типов ранних двигателей с верхним расположением клапанов, чтобы вы знали, что набор из 1947 гильз EL отправляются на кулачковую головку, а набор из 1948 гильз EL идет на круглую головку.
| 1936 – 1984 Big Twin Motor Production Dates | |
| Engine | Production Dates |
| Knucklehead | 1936-1947 |
| Panhead | 1948-1965 |
| Shovelhead | 1966-1984 |
Любые буквы после кода двигателя сообщают более подробную информацию о двигателе. Они могут указывать на особую модель (например, A для армии или R для заводского гоночного автомобиля), но обычно говорят о производительности двигателя по сравнению с базовым двигателем. Например, стандартный двигатель серии U имеет диаметр 74 дюйма и головки среднего сжатия. На основе этого двигателя Harley построил три несколько разных версии, которые получили обозначения UH, UL и ULH. UH — это просто увеличенная версия базового двигателя с увеличенным рабочим объемом до 80 дюймов и сохранением головок сжатия среднего размера. UL имел тот же рабочий объем, что и базовый двигатель, но оснащен головками с высоким сжатием. Наконец, ULH представляет собой комбинацию двигателей UL и UH с 80-дюймовыми головками и головками с высоким сжатием. К сожалению, Harley с годами немного менял значения этих букв, чтобы соответствовать их текущему модельному ряду. Итак, если мы посмотрим на обозначения моделей для ранних головок, мы обнаружим, что действительно существует 74-дюймовый базовый двигатель средней степени сжатия, обозначенный буквой F, а также модель FL, которая представляет собой 74-дюймовый двигатель с более высокой степенью сжатия. Чего мы не видим, так это средней степени сжатия 80 дюймов FH или высокой степени сжатия 80 дюймов FLH. Вместо этого есть 74-дюймовый FLH, который представляет собой версию двигателя FL с более высокой степенью сжатия. В таблице ниже показаны некоторые из наиболее часто используемых букв от 1920 и 1969 года вместе с их возможными обозначениями.
| Letters Used From 1920 — 1969 in Model Designations | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Letter | Common Designations | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| A | Army or No Tow Bar (servicer option) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| C | Коммерческий или канадский | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| D | Увеличенный рабочий объем или повышенная производительность | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| E | Электрический запуск или комбинация движения (вариант полиции) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| H | Повышенное смещение или повышение производительности | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| L | Высокая сжатие | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| R | . любого модельного года до 1970 года, если вы посмотрите фактические производственные номера Harley, вы увидите, что в списке есть много моделей, в которых используются буквы, не включенные в приведенную выше таблицу. Причина в том, что Harley не включил эти буквы в VIN-номера. В то время как Harley, возможно, производил и FLHF, и FLF в 1957, например, эти велосипеды имели бы штампы FLH и FL соответственно, а буква F (обозначающая педаль переключения передач) опускалась. Другие примеры пропущенных букв: S для коляски и B для электрического запуска. Последняя часть головоломки — это серийный номер, и неудивительно, что Харли добавил к нему пару поворотов. Вплоть до 1961 года серийный номер всегда начинался с 1000. Это означало, что первая головка EL, сходящая с конвейера в 1948 году, имела VIN-номер 48EL1001, а не 48EL0001. Тогда с 1962-1969 Harley решил немного изменить ситуацию, сделав первую цифру серийного номера четной для четных годов выпуска и нечетной для нечетных годов выпуска для четырехзначных серийных номеров. Сделав шаг вперед, на заводских номерах, которые были 5-значными, они сделали первые два числа нечетными для нечетных годов выпуска, а первые два числа — четными для четных лет выпуска. Номера VIN Harley-Davidson с 1970 по 1980 годВ 1970 году компания Harley решила изменить номер VIN на 9-значную комбинацию букв и цифр со следующим расположением:
Рисунок 3. Номер VIN Harley-Davidson FXE 1975 года на двигателе.
Как упоминалось ранее, 1970 год также стал первым годом, когда официальный номер VIN был перенесен на шейку рамы, хотя соответствующий номер VIN все еще был выбит на двигателе. За первый месяц 1979, Harley решили нанести уникальные несовпадающие VIN-номера на раму и двигатель, но из-за жалоб полиции (все мотоциклы выглядели украденными) эта практика сохранилась только для серийных номеров 43000H9 — 48199H9. Номера VIN Harley-Davidson с 1981 г. по настоящее время Начиная с 1981 года компания Harley внедрила новый формат 17-значного номера VIN, который был предписан Национальным управлением безопасности дорожного движения. Полный код был выбит на шейке рамы, а сокращенная 10-значная версия выбита на двигателе.
Рисунок 4. Номер VIN Harley-Davidson XL1200C 1996 года на раме. Рисунок 5. Номер VIN мотоцикла Harley-Davidson XL1200C 1996 года выпуска на двигателе. 17-значный код содержит много информации, но с помощью приведенных ниже таблиц вы можете определить все детали любого мотоцикла Harley-Davidson, выпущенного с 1981 года по настоящее время.
Между кодом периода внедрения и кодом модельного года находится однозначный контрольный номер, используемый для обнаружения недействительных VIN.
Наконец, у вас осталось 6 цифр, обозначающих заводской номер мотоцикла. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||