Контроллер шагового двигателя Arduino
| Невон Проекты
Скачать проектный документ/конспект
Шаговые двигатели также известны как шаговые двигатели или шаговые двигатели. Это потому, что они делят один полный оборот вала на несколько равных шагов. Шаговый двигатель известен своим свойством преобразовывать последовательность входных импульсов (обычно прямоугольных) в точно определенное приращение положения вращения вала. Каждый импульс поворачивает вал на фиксированный угол.
Здесь мы разрабатываем контроллер шагового двигателя на основе Arduino, который позволяет пользователю управлять шаговым двигателем в 3 различных режимах:
- Режим полного вращения
- Режим четвертного вращения
- Режим энкодера/ Ручной режим
Система использует контроллер Arduino uno вместе с ЖК-дисплеем, шаговым двигателем NEMA, оптическим энкодером, драйвером шагового двигателя, переключателями и кнопками, а также основными электронными компонентами и печатной платой для разработки этой системы.
Режим полного вращения:
Переключение системы в режим полного вращения позволяет пользователю управлять направлением вращения двигателя без остановки. Теперь двигатель можно непрерывно вращать как по часовой стрелке, так и против часовой стрелки с помощью простой кнопки переключения.
Режим четверти оборота:
В этом режиме движение шагового двигателя ограничено четвертью оборота. При переключении в этот режим пользователь может нажать красную кнопку. При нажатии кнопки шаговый двигатель совершает ровно четверть оборота и останавливается. При повторном нажатии той же кнопки двигатель поворачивается еще на четверть, начиная с последней точки, в которой t остановился.
Режим энкодера/Ручной режим:
Этот режим дает пользователю полное ручное управление шаговым двигателем. При переключении в этот режим пользователь может управлять движением двигателя с помощью оптического энкодера. Оптический энкодер оснащен ручкой, которая облегчает его вращение. Когда пользователь вращает ручку, шаги вращения передаются на контроллер, и Arduino отображает количество шагов на ЖК-дисплее. Также он использует шаговый драйвер для пошагового вращения двигателя соответственно ручному вращению оптического энкодера.
Когда пользователь вращает ручку, шаги вращения передаются на контроллер, и Arduino отображает количество шагов на ЖК-дисплее. Также он использует шаговый драйвер для пошагового вращения двигателя соответственно ручному вращению оптического энкодера.
Таким образом, мы разработали систему контроллера шагового двигателя на основе Arduino, которая позволяет пользователю управлять движением шагового двигателя в 3 различных режимах.
- Компоненты
- Ардуино Уно
- Оптический энкодер
- Шаговый двигатель
- Драйвер шагового двигателя
- ЖК-дисплей
- Зуммер
- Трансформатор
- Схема регулятора
- Переключатели
- Светодиоды
- Печатная плата
- Резисторы
- Конденсаторы
- Транзисторы
- Кабели и разъемы
Блок-схема
Arduino Power Magnetic Driver Board for Stepper Motors
Рис. 1 Arduino с платой управления униполярным шаговым двигателем.
1 Arduino с платой управления униполярным шаговым двигателем.
Нажмите, чтобы увеличить изображение.
by Lewis Loflin
Примечание: нажмите на любое изображение, чтобы увеличить его.
Состоит из двух частей. Схема платы драйвера не требует пояснений. Я использую ULN2003A с открытым коллектором для включения переключателя Vcc транзистора PNP.
Я использую четыре силовых транзистора Дарлингтона TIP125. Они рассчитаны на 5 ампер при 60 вольт. Я использую это для управления униполярным шаговым двигателем.
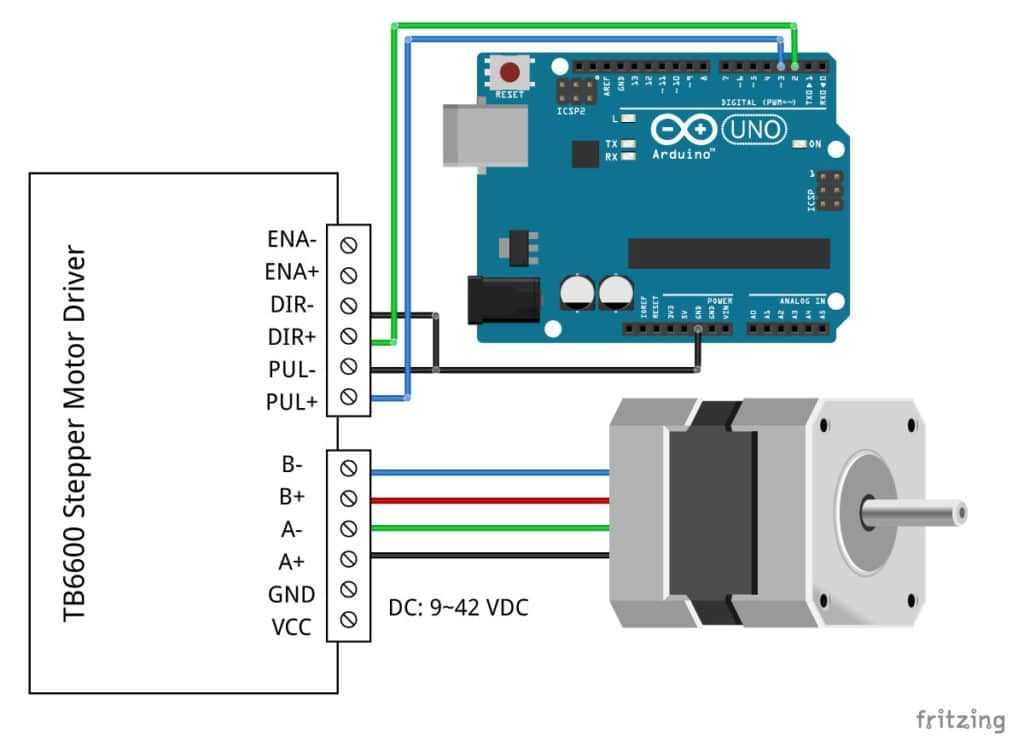
Рис. 2 Электрические соединения Arduino с платой управления униполярным шаговым двигателем.
Нажмите, чтобы увеличить изображение.
Шаговый двигатель и соединения Arduino. Плата имеет семь входов. Четыре используются для управления входами ULN2003A для управления силовыми транзисторами.
Оставшиеся три из семи драйверов ULN2003A выкуплены на контакты разъема. Это открытый коллектор, рассчитанный на 50 вольт при 500 мА.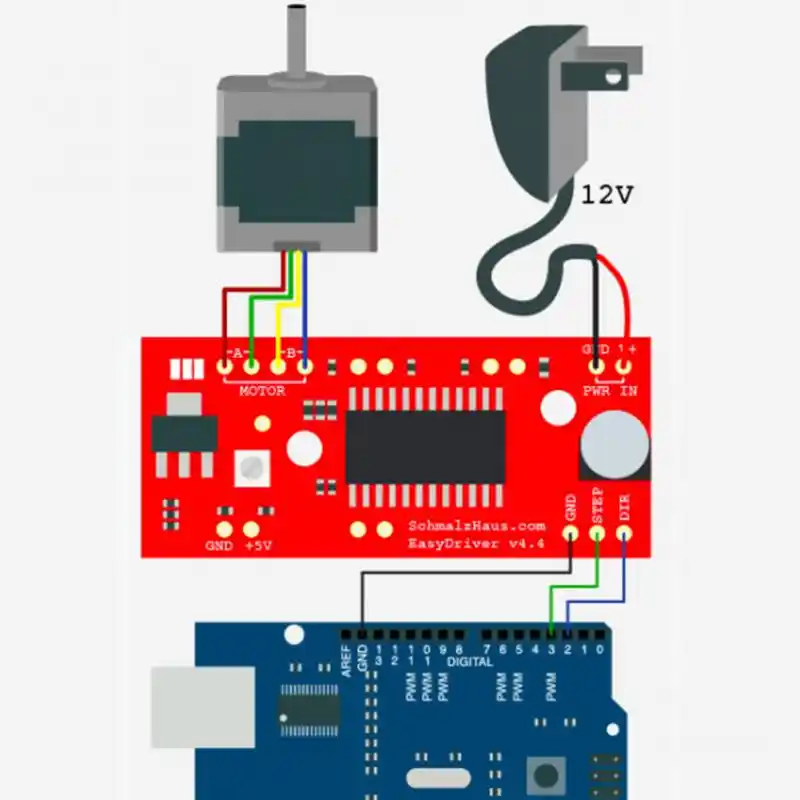
Обратите внимание, что соединения шагового двигателя должны быть подключены, как показано на рисунке. Другие моторы с другими цветами — это вопрос проб и ошибок.
Рис. 3 Схема пары драйверов TIP125 для каждой обмотки шагового двигателя.
Нажмите, чтобы увеличить изображение.
В электрических соединениях с каждой обмоткой шагового двигателя используется пара транзисторов.
Вход HIGH переключает драйвер ULN2003A на землю. Создает ток эмиттер-база, превращая ток коллектор-эмиттер в нагрузку.
TIP125 имеет внутренние ограничительные диоды коллектор-эмиттер, и я добавил диоды 1N4001, как показано на рисунке.
Рис. 4 различные детали, используемые в плате униполярного шагового двигателя.
Нажмите, чтобы увеличить изображение.
Внутренние детали платы драйвера.
Обратите внимание, что напряжение питания двигателя подавалось через источник постоянного тока, настроенный на 1 ампер.
Код изначально был написан для 12-вольтового шагового двигателя Airpax. Он состоит из двух подпрограмм: вперед(счетчик, шаг_задержка) и назад(счетчик, шаг_задержка).
Он состоит из последовательности 4-битных выходных битов шагового двигателя, которые включают и выключают различные половины каждой катушки.
Подпрограмма «вперед» или «по часовой стрелке» проходит через бесконечный цикл while. Каждый шаг уменьшает значение переменной count, что прерывает цикл при значении count = 0.
Обратно или против часовой стрелки — это одно и то же, последовательность обратная.
Можно использовать прямые команды порта или строку команд digitalWrite(), по четыре на шаг.
См. Пересмотр регистров портов Arduino.
Все обмотки отключаются до того, как будут записаны следующие 4 бита.
На веб-странице шаговых двигателей подробно рассказывается о том, как работают шаговые двигатели. См. Использование униполярного шагового двигателя с Arduino.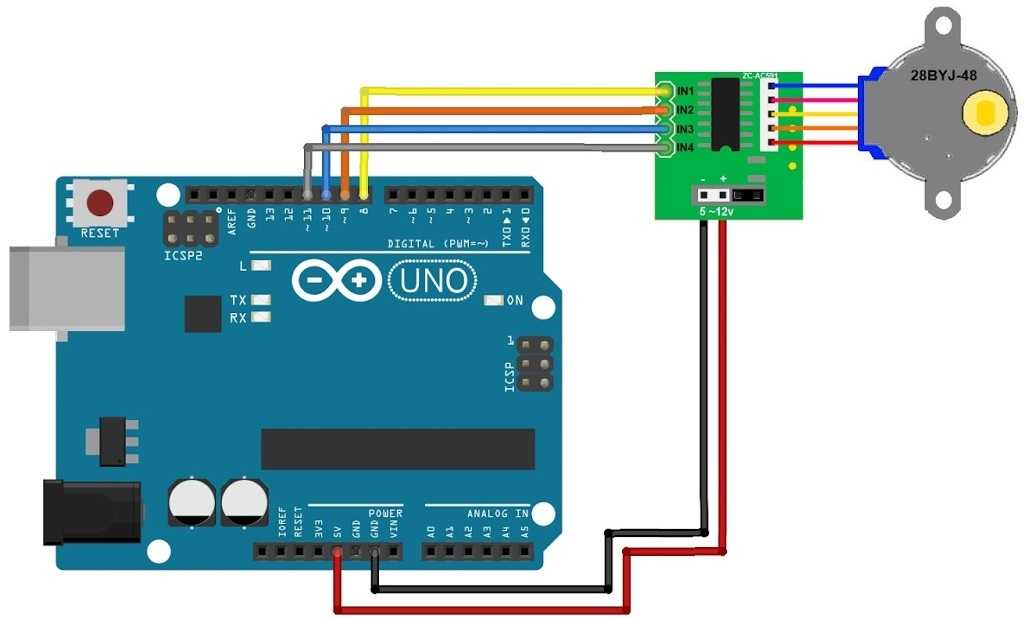
Новый код выглядит следующим образом: оригинальный код на странице шагового двигателя Arduino.
Загрузите код Arduino ard_stepper.txt
- Быстрая навигация на этом сайте:
- Базовое обучение электронике и проекты
- Основные проекты твердотельных компонентов
- Проекты микроконтроллеров Arduino
- Электроника Raspberry Pi, Программирование
- Управление высоковольтным мостом постоянного тока на базе IGBT
- Управление высоковольтным двигателем H-Bridge на базе IR2110, управляемое Arduino
- Понимание теории работы однопереходных транзисторов
- Arduino измеряет ток от источника постоянного тока
- Теоретические испытания источника постоянного тока
- Обзор закона Ома для устранения неисправностей цепей CCS
- Arduino Power Magnetic Driver Board для шаговых двигателей
- Источник постоянного тока, управляемый Arduino
- Теория и работа конденсаторов
- Похожие видео на YouTube:
- Измерение тока от источника постоянного тока с помощью Arduino
- Устранение неисправностей мультиметра с источником постоянного тока
- Обзор закона Ома для источника постоянного тока
- с кодом Arduino
- Источник постоянного тока, управляемый Arduino
Плата драйвера униполярного шагового двигателя Arduino
- Понимание теории работы однопереходных транзисторов
- Как использовать SIDAC и их работу
- SIDAC Controlled Flashtube и Pulse Circuits YouTube
- Неоновые (NE-2) схемы, которые можно собрать
- Общие сведения о ксеноновых импульсных лампах и схемах
Веб-сайт Copyright Lewis Loflin, Все права защищены.