Содержание
Модуль драйвера A4988 для управления шаговыми двигателями в 3D принтерах, Китай
Главная
» Комплектующие
» Электроника
» Контроллеры двигателей
» Модуль драйвера шаговых двигателей A4988 с радиатором, Китай (зелёный)
Описание
Отзывы (0)
Похожие товары (3)
Драйвер для шагового двигателя на базе микросхемы A4988. Позволяет управлять биполярным шаговым двигателем с потребляемым током до 2 A на обмотку. Напряжение 3…5,5 В для для питания цифровой части и 8…35 В для двигателя. Пять видов шага: полный шаг, полшага, четверть шага, 1/8 и 1/16 шага. Для токов более 1А на катушку рекомендуется использовать радиатор.
Этот драйвер шаговых двигателей A4988 подходит для исползования с платами контроллерами RAMPS Mega Shield и Sanguinololu для сборки надорогих 3D принтеров RepRap Prusa, Mendel и других своими руками.
Включение/выключение двигателя при включенном питании может вывести модуль из строя!
| Вес и размеры | |
| Вес | 0.03кг |
| Размеры (Д х Ш х В) | 2.00см x 2.00см x 1.50см |
Нет отзывов об этом товаре.
Ваше Имя:
Ваш отзыв:
Внимание: HTML не поддерживается! Используйте обычный текст.
Оценка: Плохо
Хорошо
Введите код, указанный на картинке:
Продолжить
Метки:
A4988,
драйвер,
pololu,
reprap,
prusa,
mendel,
StepStick
Доставка по России
Мы доставляем заказы в следующие города: Москва, Санкт-Петербург, Новосибирск, Екатеринбург, Нижний Новгород, Казань, Самара, Омск, Челябинск, Ростов-на-Дону, Уфа, Волгоград, Красноярск, Пермь, Воронеж, Саратов, Краснодар, Тольятти, Барнаул, Ульяновск, Тюмень, Ижевск, Иркутск, Владивосток, Ярославль, Хабаровск, Махачкала, Оренбург, Новокузнецк, Томск, Кемерово, Рязань, Астрахань, Пенза, Набережные Челны, Липецк, Киров, Чебоксары, Калининград, Курск, Улан-Удэ, Ставрополь, Магнитогорск, Брянск, Иваново, Тверь, Белгород, Сочи, Нижний Тагил. В Туле вы можете забрать из самостоятельно или заказать доставку курьером в удобное для вас время.
В Туле вы можете забрать из самостоятельно или заказать доставку курьером в удобное для вас время.
Выбор драйвера для шагового двигателя MT-1703HD200AW. Сравнение между DRV8825 и А4988
Авторы:
Аверченко Артем Павлович,
Молдагулова Анель Артуровна,
Нурмаганов Роман Сагадатович
Рубрика: Информационные технологии
Опубликовано
в
Молодой учёный
№50 (288) декабрь 2019 г.
Дата публикации: 14.12.2019
2019-12-14
Статья просмотрена:
886 раз
Скачать электронную версию
Скачать Часть 1 (pdf)
Библиографическое описание:
Аверченко, А. П. Выбор драйвера для шагового двигателя MT-1703HD200AW. Сравнение между DRV8825 и А4988 / А. П. Аверченко, А. А. Молдагулова, Р. С. Нурмаганов. — Текст : непосредственный // Молодой ученый. — 2019. — № 50 (288). — С. 4-6. — URL: https://moluch.ru/archive/288/65222/ (дата обращения: 26.12.2022).
П. Выбор драйвера для шагового двигателя MT-1703HD200AW. Сравнение между DRV8825 и А4988 / А. П. Аверченко, А. А. Молдагулова, Р. С. Нурмаганов. — Текст : непосредственный // Молодой ученый. — 2019. — № 50 (288). — С. 4-6. — URL: https://moluch.ru/archive/288/65222/ (дата обращения: 26.12.2022).
Драйвер — это посредник между шаговым двигателем (ШД) и источником управляющих воздействий. С его помощью производится управление ЩД с возможностью точного позиционирования вала ШД. Основная задача драйвера в том, чтобы в зависимости от входного сигнала подавать соответствующее напряжение на обмотки шагового двигателя. [1]
Задача состоит в экспериментальном определении наиболее оптимального драйвера для ШД MT-1703HD200AW. Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которых двигатель перестает, вращаться стабильно. Граничные частоты являются рекомендованными для создания устройств на базе данных ШД и драйвера.
Граничные частоты являются рекомендованными для создания устройств на базе данных ШД и драйвера.
Управление ШД осуществляется через входы драйвера «ENABLE», «MS1», «MS2», «MS3», «STEP» и «DIR».
– ENABLE — отвечает за включение драйвера;
– «MS1», «MS2», «MS3» — отвечают за переключения микрошаговых режимов.
– DIR — отвечает за направление вращения ШД;
– STEP — отвечает за прием импульсов вращения.
Тип шагового двигателя является самым важным фактором при выборе драйвера шагового двигателя. В нашем исследовании будем использовать биполярный шаговый двигатель MT-1703HD200AW.
Стоит обратить внимание на силу тока, которую может обеспечить драйвер. Нужно выбирать драйвер, который будет обеспечивать ток, не меньше тока фазы выбранного шагового двигателя. [2]
Напряжение питания влияет на динамику, вибрации, нагрев двигателя и драйвера.
Наличие микрошаговых режимов обеспечивает плавность работы ШД на малых оборотах и высокую разрешающую способность угла позиционирования. Использование режима микрошага уменьшает резонансный эффект ШД. При возникновении, которого ШД начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала.
Использование режима микрошага уменьшает резонансный эффект ШД. При возникновении, которого ШД начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала.
Для данной работы были выбраны два драйвера DRV8825 и А4988. Драйвер А4988 создан компанией Allegro, а драйвер DRV8825 создан компанией TI (Texas Instruments Inc.). Расположение выводов и интерфейс этих модулей практически совпадают. Что позволяет производить замену драйверов в устройствах без изменения разводки платы, но с возможным редактированием программного кода управления.
Рис. 1. Драйвер шагового двигателя А4988 и DRV8825
Основные отличия между драйверами DRV8825 и A4988:
У драйвера DRV8825 есть выход FAULT, а у драйвера А4988 он отсутствует. FAULT — выход сигнализации срабатывания защиты. На данном выходе сигнал логического «0» обозначает что, полевые транзисторы Н-моста были отключены в результате защиты от перегрузки по току или из-за перегрева.
Вывод SLEEP на DRV8825 не подтянут к питанию по умолчанию, как на A4988, но он соединён на плате с выводом FAULT через 10k резистор.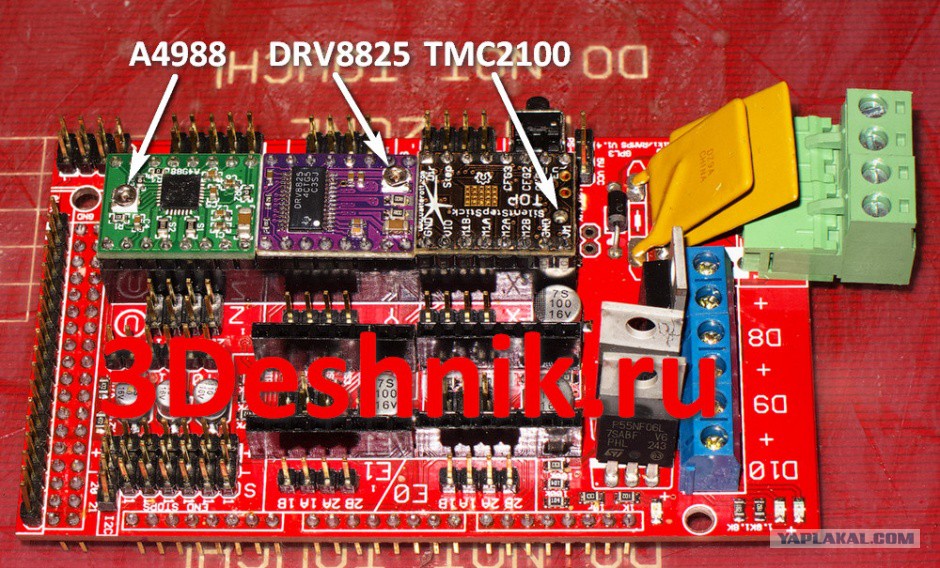
Различное расположение потенциометра, регулирующего предельный ток. Разное отношение предельного тока к опорному напряжению.
Драйвер на DRV8825 поддерживает 1/32-шаг в микрошаговом режиме. У A4988 максимум 1/16-шага. Вход 1/16-шагового режима на А4988 соответствует 1/32-шаговому на DRV8825. Остальные режимы переключения драйверов совпадаю.
DRV8825 поддерживает более высокое напряжение питания 8,2..45В, а A4988 8…35В. Это означает, что драйвер DRV8825 безопаснее при работе с высоким напряжением и менее восприимчив к индуктивно-ёмкостным скачкам напряжения.
Драйвер DRV8825 обеспечивает ток до 1,5А на фазу без радиатора, а А4988 1А.
Драйвер А4988 дешевле драйвера DRV8825.
В таблице — 1 и 2, при напряжении питания драйвера 4,5В, разгоняем ШД плавно от стабильного запуска и до частоты срыва, для различных микрошагов. Определили предельное значение частоты, при которой ШД стабильно запускается.
Таблица 1
Частоты запуска исрыва ШД сдрайвером А4988
Назначение микрошага | Оптимальная частота плавного перехода при 4. | Предельное значение запуска ШД | |
запуск | предел | ||
Полный шаг | 850 Гц / 255 об/мин | 9000 Гц / 2700 об/мин | 1000 Гц |
Половина шага | 1500 Гц / 450 об/мин | 2560 Гц / 768 об/мин | 2500 Гц |
Четверть шага | 3050 Гц / 915 об/мин | 31500 Гц / 9450 об/мин | 4500 Гц |
Одна восьмая шага | 6200 Гц / 1 860 об/мин | 91100 Гц / 27330 об/мин | 7900 Гц |
Одна шестнадцатая шага | 12500 Гц / 3750 об/мин | 192300 Гц / 57690 об/мин | 15300 Гц |
 5 В
5 ВТаблица 2
Частоты запуска исрыва ШД сдрайвером DRV8825
Назначение микрошага | Оптимальная частота плавного перехода при 4. | Предельное значение запуска ШД | |
запуск | предел | ||
Полный шаг | 700 Гц / 210 об/мин | 1780 Гц / 534 об/мин | 1300 Гц |
Половина шага | 1200 Гц / 180 об/мин | 10400 Гц / 1560 об/мин | 2800 Гц |
Четверть шага | 2600 Гц / 195 об/мин | 67000 Гц / 5025 об/мин | 5700 Гц |
Одна восьмая шага | 5100 Гц / 191,25 об/мин | 93000 Гц / 3100 об/мин | 13400 Гц |
Одна шестнадцатая шага | 10500 Гц / 196,875 об/мин | 389000 Гц / 7293,75 об/мин | 26700 Гц |
Одна тридцать вторая шага | 19000 Гц / 178,125 об/мин | 463000 Гц / 4340,625 об/мин | 55000 Гц |
 5 В
5 В Из таблицы 1 и 2 видно, что драйвер А4988 начинает работать стабильно при меньших значениях частот, чем драйвер DRV8825, но частота срыва у драйвера DRV8825 значительно больше при шаге 1/8 и 1/16, что делает драйвер DRV8825 более привлекательным при работе ШД MT-1703HD200AW на малых оборотах.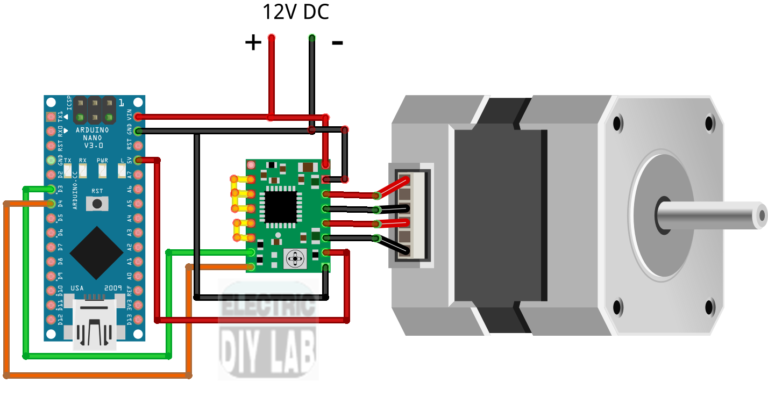
Литература:
- Пушкарев, О. «Первый шаг» шагового двигателя / О. Пушкарев //Современная электроника. — 2004. — № 1. — С. 46–47.
- Вычужанин, В. Управление шаговым электродвигателем с помощью ПЛИС / В. Вычужанин // Компоненты и технологии. — 2004. –№ 3. — С. 96–98.
Основные термины (генерируются автоматически): драйвер, мина, FAULT, шаговый двигатель, частота срыва, оптимальная частота, плавной переход, полный шаг, предельное значение запуска, стабильный запуск.
Похожие статьи
Определение частотных границ
шагового двигателя…
Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которой
Драйвер — представляет собой электрическую цепь или другой электронный компонент, предназначенный для преобразования. ..
..
Управление
шаговым двигателем с использованием…
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя, микроконтроллер, Atmel, AVR, ATmega 16, L297, L298N, LabVIEW. В современной технике, в качестве исполнительного устройства для различных систем управления часто используют ШД.
Одноканальное управление
шаговым двигателем
Шаговый двигатель может работать в шаговом или полушаговом режиме.
Скорость поворота двигателя изменяется за счет изменения частоты управляющих импульсов.
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя. ..
..
Моделирование и анализ производительности…
Обеспечение необходимой частоты и напряжения на выходе из ЧРП осуществляется с помощью широтно-импульсной модуляции. Инвертор с широтно-импульсной модуляцией (ШИМ) вырабатывает импульсы различной ширины, которые объединяются для построения…
Подбор параметров преобразователей
частоты при испытании…
Посредством преобразователей частоты производят плавный запуск электродвигателей, увеличивая частоту подводимого напряжения одновременно на обоих асинхронных двигателях с помощью преобразователей частоты до ее номинального значения.
Моделирование прямого пуска асинхронного
двигателя с ШИМ…
Целью данной работы является овладение технологией сборки модели прямого пуска асинхронного двигателя с ШИМ в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и. ..
..
Экспериментальное исследование статических и динамических…
Осреднённые значения измеренных параметров. Режим работы двигателя. Частота вращения ротора, об/мин.
TJ-100 имеет собственный блок управления двигателем (CPSJ), который осуществляет полный контроль над запуском и работой двигателя.
Математическое моделирование электропривода на базе…
Шаговый двигатель управляется сигналами STEP и DIR, поступающими из блока Signal
В параметрах переключателей Switch2 и Switch3 необходимо установить значение Threshold: 0.5.
Угол поворота на валу шагового двигателя. Примечание: во избежание ошибок при…
Расчёт предпомпажных состояний газотурбинной установки
— недопущение выхода за максимально допустимые значения температуры выхлопных газов и давления на стороне нагнетания компрессора; — защита осевой турбины от завышенного и заниженного расхода топлива и перекрытие подачи топлива в случае срыва пламени
Расчет энергетических параметров пуска асинхронного
двигателя.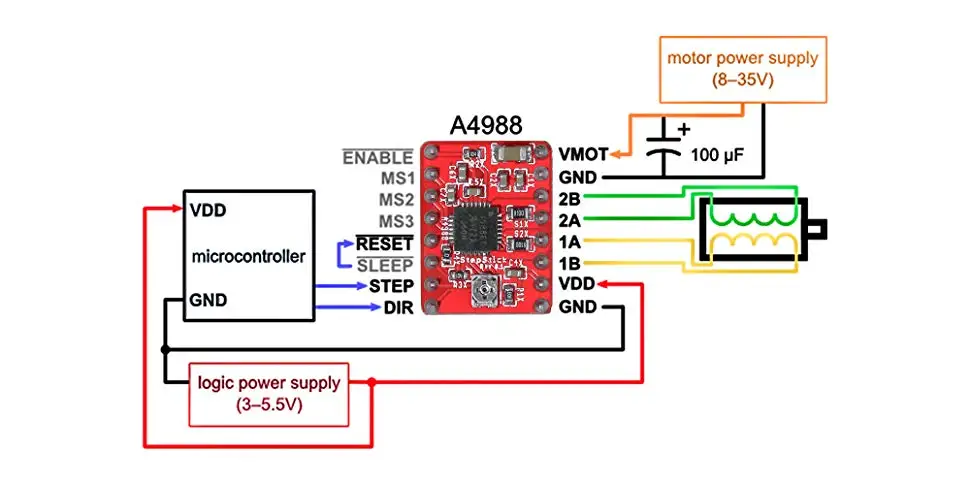 ..
..
Рассмотрены основные способы плавного пуска асинхронных двигателей и определены области их применения, определены электрические и энергетические параметры, время переходного процесса во время плавного пуска частотно-регулируемого асинхронного…
Похожие статьи
Определение частотных границ
шагового двигателя…
Необходимо, определить граничные частоты, при которых происходит плавный, стабильный запуск и вращение ШД, а также частоты срыва, на которой
Драйвер — представляет собой электрическую цепь или другой электронный компонент, предназначенный для преобразования…
Управление
шаговым двигателем с использованием…
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя, микроконтроллер, Atmel, AVR, ATmega 16, L297, L298N, LabVIEW. В современной технике, в качестве исполнительного устройства для различных систем управления часто используют ШД.
В современной технике, в качестве исполнительного устройства для различных систем управления часто используют ШД.
Одноканальное управление
шаговым двигателем
Шаговый двигатель может работать в шаговом или полушаговом режиме.
Скорость поворота двигателя изменяется за счет изменения частоты управляющих импульсов.
Ключевые слова: шаговый двигатель, управление, драйвер шагового двигателя…
Моделирование и анализ производительности…
Обеспечение необходимой частоты и напряжения на выходе из ЧРП осуществляется с помощью широтно-импульсной модуляции. Инвертор с широтно-импульсной модуляцией (ШИМ) вырабатывает импульсы различной ширины, которые объединяются для построения. ..
..
Подбор параметров преобразователей
частоты при испытании…
Посредством преобразователей частоты производят плавный запуск электродвигателей, увеличивая частоту подводимого напряжения одновременно на обоих асинхронных двигателях с помощью преобразователей частоты до ее номинального значения.
Моделирование прямого пуска асинхронного
двигателя с ШИМ…
Целью данной работы является овладение технологией сборки модели прямого пуска асинхронного двигателя с ШИМ в пакете SimPowerSystems для использования в лабораторных работах по дисциплинам «Математическое моделирование электромеханических систем» и…
Экспериментальное исследование статических и динамических…
Осреднённые значения измеренных параметров. Режим работы двигателя. Частота вращения ротора, об/мин.
Режим работы двигателя. Частота вращения ротора, об/мин.
TJ-100 имеет собственный блок управления двигателем (CPSJ), который осуществляет полный контроль над запуском и работой двигателя.
Математическое моделирование электропривода на базе…
Шаговый двигатель управляется сигналами STEP и DIR, поступающими из блока Signal
В параметрах переключателей Switch2 и Switch3 необходимо установить значение Threshold: 0.5.
Угол поворота на валу шагового двигателя. Примечание: во избежание ошибок при…
Расчёт предпомпажных состояний газотурбинной установки
— недопущение выхода за максимально допустимые значения температуры выхлопных газов и давления на стороне нагнетания компрессора; — защита осевой турбины от завышенного и заниженного расхода топлива и перекрытие подачи топлива в случае срыва пламени
Расчет энергетических параметров пуска асинхронного
двигателя. ..
..
Рассмотрены основные способы плавного пуска асинхронных двигателей и определены области их применения, определены электрические и энергетические параметры, время переходного процесса во время плавного пуска частотно-регулируемого асинхронного…
A4988 Модуль драйвера шагового двигателя Распиновка, техническое описание, спецификации и альтернативы
22 августа 2019 — 0 комментариев
A4988 — это полный драйвер микрошагового двигателя со встроенным преобразователем для простоты эксплуатации. Драйвер имеет максимальную выходную мощность 35 В и ± 2 А. Он может управлять биполярными шаговыми двигателями в режимах полного, половинного, четвертного, восьмого и шестнадцатого шагов.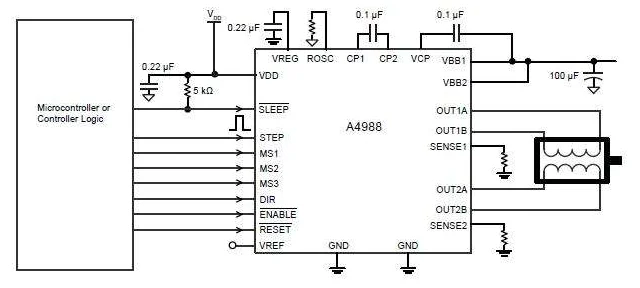
Конфигурация контактов
Название контакта | Описание |
VDD и земля | Подключен к 5В и GND контроллера |
ВМОТ и ЗЕМЛЯ | Используется для питания двигателя |
1А, 1Б, 2А, 2Б | Подключен к 4 обмоткам двигателя |
НАПРАВЛЕНИЕ | Контакт управления направлением вращения двигателя |
ШАГ | шага, контрольный контакт |
МС1, МС2, МС3 | Штифты выбора микрошага |
СОН |
контакта для управления режимами питания |
СБРОС | |
ВКЛЮЧИТЬ |
Характеристики модуля драйвера шагового двигателя A4988
- Макс.
 Рабочее напряжение: 35 В
Рабочее напряжение: 35 В - Мин. Рабочее напряжение: 8 В
- Макс. Ток на фазу: 2A
- Микрошаговое разрешение: Полный шаг, ½ шага, ¼ шага, 1/8 и 1/16 шага
- Защита от обратного напряжения: Нет
- Размеры: 15,5 × 20,5 мм (0,6″ × 0,8″)
- Защита от короткого замыкания на землю и нагрузки
- Низкий выход RDS(ON)
- Схема отключения при перегреве
 Рабочее напряжение: 35 В
Рабочее напряжение: 35 В
Альтернативы для A4988: DRV8825, L6474, L6207, L6208, TMC2208, TMC2209
Как использовать модуль драйвера A4988
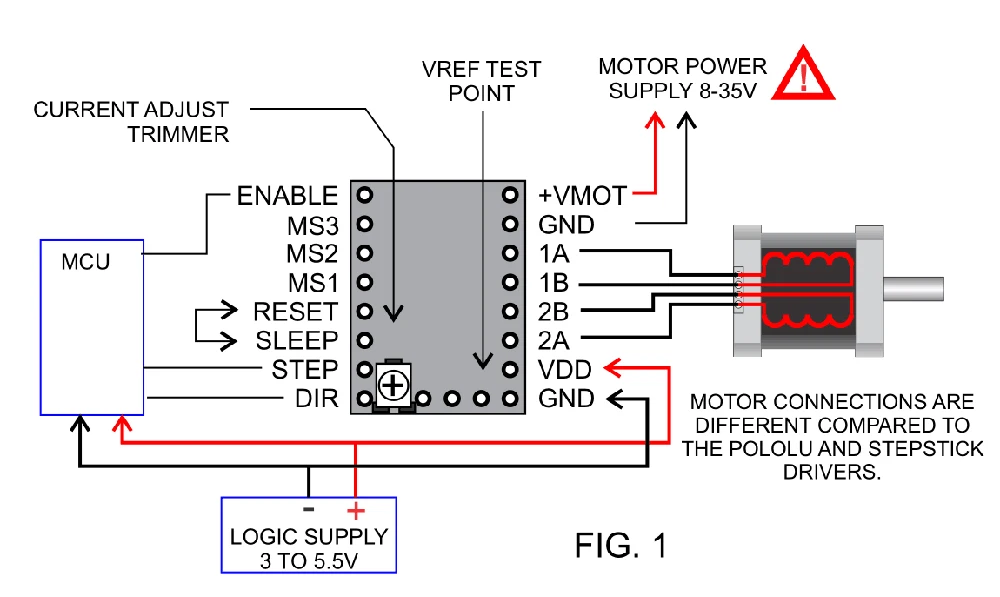
Как упоминалось ранее, A4988 имеет встроенный транслятор, поэтому для подключения его к плате контроллера требуется всего два провода. Принципиальная схема интерфейса A4988 модуль с микроконтроллером для управления шаговым двигателем показан ниже.
Как показано на диаграмме выше, только два контакта DIR и STEP модуля подключены к Arduino.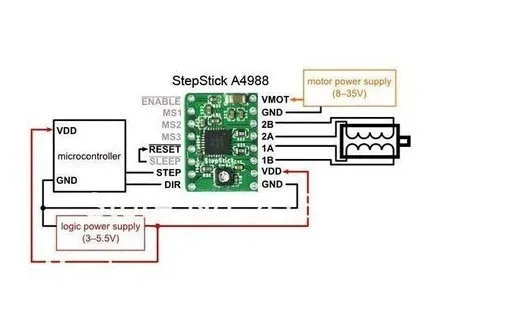 Вывод STEP используется для управления шагами, а вывод DIR используется для управления направлением. Выводы микрошага (MS1, MS2 и MS3) используются для управления модулем драйвера в различных функциях шага. В приведенной выше схеме выводы MS1, MS2 и MS3 оставлены отключенными, что означает, что драйвер будет работать в полношаговом режиме. Этот драйвер двигателя имеет на борту керамические конденсаторы с низким ESR, что делает его уязвимым для скачков напряжения, поэтому рекомендуется использовать конденсатор не менее 47 мкФ на контактах питания двигателя. Провода шагового двигателя подключаются к выходным контактам (1A, 1B, 2A и 2B) модуля драйвера. Он обычно используется для управления шаговыми двигателями серии NEMA, такими как NEMA17, NEMA23 и NEMA34
Вывод STEP используется для управления шагами, а вывод DIR используется для управления направлением. Выводы микрошага (MS1, MS2 и MS3) используются для управления модулем драйвера в различных функциях шага. В приведенной выше схеме выводы MS1, MS2 и MS3 оставлены отключенными, что означает, что драйвер будет работать в полношаговом режиме. Этот драйвер двигателя имеет на борту керамические конденсаторы с низким ESR, что делает его уязвимым для скачков напряжения, поэтому рекомендуется использовать конденсатор не менее 47 мкФ на контактах питания двигателя. Провода шагового двигателя подключаются к выходным контактам (1A, 1B, 2A и 2B) модуля драйвера. Он обычно используется для управления шаговыми двигателями серии NEMA, такими как NEMA17, NEMA23 и NEMA34
Приложения
- Используется для управления скоростью и вращением шагового двигателя.
- Используется в робототехнике для управления их движением.
- Используется в разных игрушках.

A4988 IC 2D-модель
Метки
Драйвер двигателя
Драйвер шагового двигателя
A4988: Носитель драйвера шагового двигателя + DoRobot | от J3 | Jungletronics
Драйвер биполярного шагового двигателя Allegro A4988 — 2A@35v пик — Ardu-Serie#53
Эта коммутационная плата от микрошагового драйвера биполярного шагового двигателя Allegro A4988 имеет регулируемое ограничение тока, защиту от перегрузки по току и перегрева, и пять различных разрешений микрошага (до 1/16 шага). Он работает от 8 В до 35 В и может выдавать примерно до 1 А на фазу без радиатора или принудительный поток воздуха (рассчитан на 2 А на змеевик с достаточным дополнительным охлаждением).
JK 42 HS 34 – 0424A
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушающим скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При правильных условиях эти пики могут превышать максимальное номинальное напряжение 35 В для A49.88 и необратимо повредить плату, даже когда напряжение питания двигателя составляет всего 12 В. Одним из способов защиты драйвера от таких всплесков является установка большого (не менее 47 мкФ) электролитического конденсатора поперек питания двигателя ( VMOT) и заземлить где-то рядом с платой.
При правильных условиях эти пики могут превышать максимальное номинальное напряжение 35 В для A49.88 и необратимо повредить плату, даже когда напряжение питания двигателя составляет всего 12 В. Одним из способов защиты драйвера от таких всплесков является установка большого (не менее 47 мкФ) электролитического конденсатора поперек питания двигателя ( VMOT) и заземлить где-то рядом с платой.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем смысле, переподключение чего-либо , когда оно включено, вызывает проблемы .)
Предупреждение: Я думаю, что лучше никогда не оставлять контакты MS1 , MS2, и MS3 плавающие . В видео я показываю почему. Посмотрите видео и посмотрите, о какой проблеме я говорю…
MS1 и MS3 имеют внутренние 100кОм подтягивающие резисторы и MS2 имеет внутренний 50кОм подтягивающий резистор , поэтому оставляем эти три Отключение контактов выбора микрошага приводит к переходу в полношаговый режим.
Спасибо за визит. Береги себя 🙂 Пока!
Загрузить все файлы для этого проекта
Ссылки и кредиты:
Микросхема драйвера управления двигателем — техническое описание
3: STEPPERS
Управление двигателем постоянного тока Arduino с помощью H-моста L9110 с кодом
Как использовать Arduino CNC Shield
Как использовать двухканальный модуль драйвера двигателя HG7881 (L9110)
L9110 модуль H-Bridge
9110_2_CHANLER_MOTOR_DRIRIR
DC-MOTORS-PART-1-CONTINUTE-GEAR-SERVO BRUSHLES -1/3: CONTINUOUS, H-BRIDGE, GEAR
Arduino CNC Shield простейший тест
Arduino CNC Shield Инструкция
Arduino & Visuino: управление двигателем постоянного тока с помощью драйвера L9110S
Скачать все файлы с Google Drive и Github
Похожие сообщения:
Познакомьтесь с DoRobot — Методы сборки J3 Caterpillar-Crawler-Chassis v 1.0 — ArduSerie#46 -use-motor — .8A @ 12v пик — Ardu_Serie # 47
E ASYDRIVER : Драйвер 4-проводного шагового двигателя — Brian Schmalz Design on A3967 IC — Bi-Polar Motors — .