Содержание
Динамическое торможение асинхронного двигателя (схема, видео)
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем.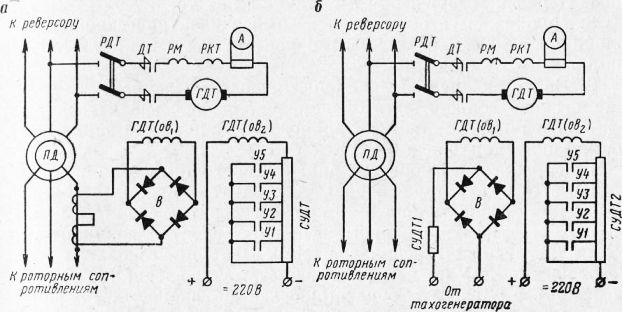 Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.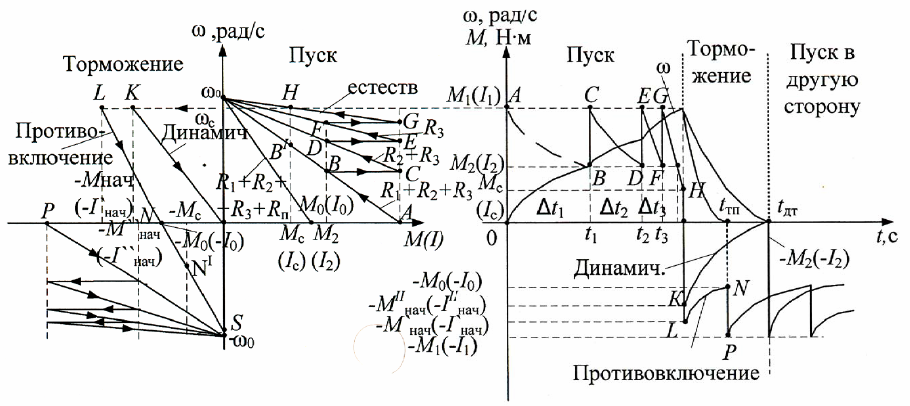
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением.
 Подключением к обмоткам статора батареи конденсаторов.
Подключением к обмоткам статора батареи конденсаторов.
 Подключением к обмоткам статора батареи конденсаторов.
Подключением к обмоткам статора батареи конденсаторов.Виды динамического торможения
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.
Торможение электродвигателя: способы и схемы
Торможение электродвигателя применяют, если необходимо сократить время свободного выбега и фиксацию механизма в конкретном положении. Существует несколько видов принудительной остановки устройства. Это механическое, электрическое и комбинированное. Механическое устройство представляет собой тормозной шкив, закрепленный на валу, с колодками. После отключения устройства колодки прижимаются к шкиву. За счет трения кинетическая энергия преобразуется в тепловую, т.е. происходит процесс торможения. Остальные способы и схемы торможения электрического двигателя будут рассмотрены далее в статье.
За счет трения кинетическая энергия преобразуется в тепловую, т.е. происходит процесс торможения. Остальные способы и схемы торможения электрического двигателя будут рассмотрены далее в статье.
- Способы электрического торможения электроприводов
- Противовключения
- Динамическая остановка электропривода
- Режимы торможения моторов постоянного тока
- Рекуперативное торможение электрических машин
- Режим рекуперации в асинхронных электрических машинах
- Комбинированный режим
Способы электрического торможения электроприводов
Для того чтобы быстро остановить устройство или обеспечить постоянную скорость вращения используют электрические способы остановки. В зависимости от схемы включения тормозные режимы подразделяют на:
- противовключения;
- динамический;
- рекуперативный.
Противовключения
Режим противовключения применяется при необходимости быстрой остановки механизма. Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
В этом случае ротор вращается в противоположном направлении магнитного поля статора. Вращение ротора замедляется. При скорости вращения близкой к нулю с реле контроля скорости поступает сигнал, отключая механизм от сети.
На нижеприведенном рисунке представлена схема противовключения асинхронного электромотора.
После переключения обмоток возникает повышенное действующее напряжение и увеличение тока. Для его ограничения, в обмотки ротора или статора устанавливают дополнительные резисторы. Они ограничивают токи в обмотках в режиме торможения.
Динамическая остановка электропривода
Этот способ применяют на асинхронных машинах, подключенных к сети переменного тока. Он заключается в отключении обмоток от сети переменного напряжения и подачи постоянного тока на обмотку статора.
На вышеприведенном рисунке представлена схема торможения трехфазного двигателя постоянным током.
Подача постоянного напряжения осуществляется с помощью понижающего трансформатора для динамического торможения. Пониженное переменное напряжение преобразуется в постоянное диодным мостом и подается на статорную обмотку. Для торможения электромотора может применяться дополнительный источник постоянного тока.
При этом ротор может быть выполнен в виде «беличьей клетки» или ее обмотку подключают к добавочным резисторам.
Постоянное напряжение создает неподвижный магнитный поток. При вращении ротора в нем наводится ЭДС, т.е. электромотор переходит в режим генератора. Возникающая электродвижущая сила рассевается на обмотке ротора и добавочных резисторах. Создается тормозной момент. В момент остановки механизма постоянное напряжение отключается по сигналу реле скорости.
Механизмы, где применяется электродвигатель с самовозбуждением, динамическую остановку выполняют с помощью подключения конденсаторов. Они соединяются треугольником или звездой.
Схема приведена на нижеприведенном рисунке.
На выбеге остаточная энергия магнитного поля переходит в заряд конденсаторов, а затем она питает обмотку статора. Возникающий тормозной эффект останавливает механизм. Конденсаторная батарея может быть подключена постоянно или подсоединяться в момент отключения от сети. Такая схема получила название «конденсаторное торможение асинхронного двигателя».
Если необходимо быстро остановить двигатель, то после отключения от сети, замыкают контакты накоротко без гасящих резисторов. При соединении обмоток закорачиванием в них возникают большие токи. Для уменьшения токов к обмоткам подключают токоограничивающие резисторы.
На нижеприведенном рисунке представлена схема с токоограничивающими резисторами.
Режимы торможения моторов постоянного тока
Динамическое торможение электродвигателя постоянного тока осуществляется после отключения его от сети с замыканием обмотки ротора на тормозной реостат. Выделенная электрическая энергия рассеивается на реостате.
На вышеприведенном рисунке представлены схемы реостатного торможения двигателя постоянного тока.
Рекуперативное торможение электрических машин
Рекуперативное торможение электродвигателя характеризуется переводом двигателя в генераторный режим. При этом вырабатываемая электроэнергия возвращается в сеть или используется для подзарядки аккумулятора.
Этот режим широко применяется в электровозах, электричках, трамваях и троллейбусах. В момент торможения, вырабатываемая электроэнергия возвращается в электрическую сеть.
Режим рекуперативного торможения применяется для подзарядки аккумуляторов в гибридных автомобилях, электромобилях, электросамокатах, электровелосипедах.
Этот режим является наиболее экономичным и возможен при условии: если частота вращения ротора превышает частоту вращения холостого хода. Это условие выполняется, когда ЭДС электродвигателя превышает напряжение питающей сети. А ток якоря и магнитный поток меняют свое направление. Электрическая машина переходит в генераторный режим, возникает момент торможения.
На рисунке представлена схема торможения тягового двигателя а) с независимым возбуждением и стабилизирующим сопротивлением, б) с противовозбуждением возбудителя.
Режим рекуперации в асинхронных электрических машинах
Режим рекуперации применяется не только в двигателях постоянного тока. Его можно применять и в асинхронных двигателях.
При этом такой режим возможен в следующих случаях:
- Если изменить частоту питающего напряжения при помощи частотного преобразователя. Что возможно при условии питания асинхронного электродвигателя от устройства с возможностью регулирования частоты питающей сети. Эффект торможения наступает при уменьшении частоты питающего напряжения. При этом переход в генераторный режим происходит, когда скорость вращения ротора становится больше номинальной (синхронной).
- Асинхронные машины, которые конструктивно имеют возможность переключения обмоток, для изменения скорости.
- В грузоподъёмных механизмах, где применяется силовой спуск. В них монтируется электромотор с фазным ротором. В этом случае скорость регулируется с помощью изменения величины резистора, подсоединяемого к обмоткам ротора. Магнитный поток начинает обгонять поле статора, а скольжение становится больше 1. Электромотор переходит в режим генератора, вырабатываемая электроэнергия возвращается в сеть, возникает тормозной эффект.
 Магнитный поток начинает обгонять поле статора, а скольжение становится больше 1. Электромотор переходит в режим генератора, вырабатываемая электроэнергия возвращается в сеть, возникает тормозной эффект.
Магнитный поток начинает обгонять поле статора, а скольжение становится больше 1. Электромотор переходит в режим генератора, вырабатываемая электроэнергия возвращается в сеть, возникает тормозной эффект.Комбинированный режим
Комбинированные тормозные режимы применяются в электрических машинах, если необходимо быстро остановить и зафиксировать механизм. Для этого используют механический блок торможения в комбинации с электрическим торможением. Комбинация может быть различной. Это может быть и электрическая схема с противовключением, динамическим и рекуперативным режимами.
Вот мы и рассмотрели основные способы и схемы торможения электродвигателей. Если возникнут вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
- Для чего нужно реле приоритета нагрузок
- Что такое скольжение асинхронного двигателя
- Что такое звезда и треугольник в электродвигателе
Adblock
detector
Динамическое торможение асинхронного двигателя
(a) Динамическое торможение асинхронного двигателя переменным током — Динамическое торможение асинхронного двигателя переменным током получается, когда двигатель работает от однофазного питания, отключив одну фазу от источника и либо оставив ее разомкнутой (рис. 6.15(б)) или подключение его к другой фазе машины (рис. 6.15(в)). Два соединения на фиг. 6.15(b) и (c), соответственно, известны как двух- и трехпроводные соединения. При подключении к однофазной сети можно считать, что двигатель питается от трехфазного набора напряжений прямой и обратной последовательности. Чистый крутящий момент, создаваемый машиной, представляет собой сумму крутящих моментов, обусловленных напряжениями прямой и обратной последовательности. Когда ротор имеет высокое сопротивление, чистый крутящий момент отрицательный и осуществляется торможение. Анализ двигателя для двух- и трехотводных соединений выполняется следующим образом:
6.15(б)) или подключение его к другой фазе машины (рис. 6.15(в)). Два соединения на фиг. 6.15(b) и (c), соответственно, известны как двух- и трехпроводные соединения. При подключении к однофазной сети можно считать, что двигатель питается от трехфазного набора напряжений прямой и обратной последовательности. Чистый крутящий момент, создаваемый машиной, представляет собой сумму крутящих моментов, обусловленных напряжениями прямой и обратной последовательности. Когда ротор имеет высокое сопротивление, чистый крутящий момент отрицательный и осуществляется торможение. Анализ двигателя для двух- и трехотводных соединений выполняется следующим образом:
Двухпроводное соединение: Предположим, что фаза A двигателя, соединенного звездой, разомкнута. Тогда I A = 0 и I C = -I B . Следовательно, компоненты положительной и отрицательной последовательности I p и I n соответственно равны
, где α определяется уравнением (6. 17).
17).
Поскольку компоненты прямой и обратной последовательности равны и противоположны, две эквивалентные цепи могут быть соединены последовательно в оппозиции. Напряжение, подаваемое на эту комбинацию последовательностей, будет равно 9 В.0005
При приложенном напряжении jV BC /√3, если ток I p = – I n = jI B /√3, следует, что при приложенном фазном напряжении V ток будет I B /√3. Таким образом, эквивалентная схема может быть изображена так, как показано на рис. 6.16(а). Хотя значения составляющих прямой и обратной последовательности тока равны, соответствующие моменты не равны. Характер кривых скорость-момент для токов прямой и обратной последовательности, а также чистый крутящий момент показаны на рис. 6.16(b). Подходящим выбором сопротивления ротора можно получить тормозной момент во всем диапазоне скоростей. Поскольку требуемое сопротивление ротора велико, динамическое торможение асинхронного двигателя переменного тока можно использовать только в двигателях с фазным ротором.
В связи с этим при высоких скоростях (или при малых значениях скольжения) импеданс части прямой последовательности становится очень высоким. Поскольку компоненты тока прямой и обратной последовательности должны быть равны, чистый тормозной момент мал, и, следовательно, торможение не очень эффективно.
Трехпроводное соединение: Здесь две фазы обмотки двигателя, соединенной звездой, соединены параллельно и последовательно с третьей фазой (рис. 6.15(c)). Пусть фазы А и В соединены вместе, тогда
В отличие от двухпроводного соединения здесь равны величины составляющих прямой и обратной последовательности напряжения, а не составляющие прямой и обратной последовательности токов. Эквивалентная схема показана на рис. 6.17. Части прямой и обратной последовательности цепи независимы, и, следовательно, нет ограничений, налагаемых на составляющую тока обратной последовательности частью эквивалентной цепи прямой последовательности.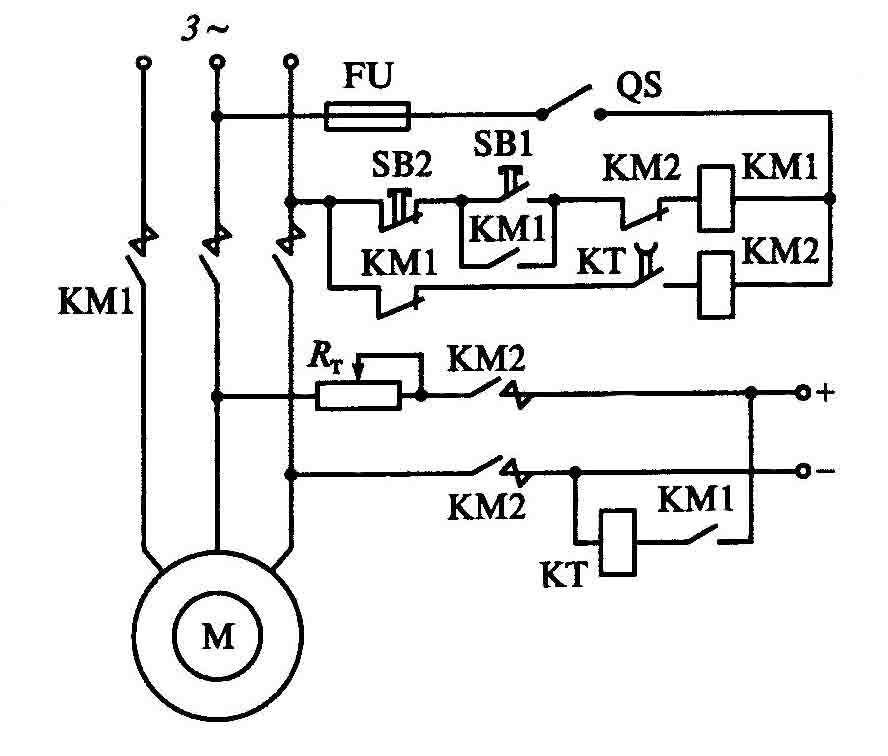 Таким образом достигаются более высокие тормозные моменты (по сравнению с двухпроводным соединением) на высоких скоростях. Характер скоростно-моментной характеристики при таком соединении такой же, как показано на рис. 616(b).
Таким образом достигаются более высокие тормозные моменты (по сравнению с двухпроводным соединением) на высоких скоростях. Характер скоростно-моментной характеристики при таком соединении такой же, как показано на рис. 616(b).
Любое неравенство между контактными сопротивлениями в соединениях двух параллельных фаз снижает тормозной момент и может даже привести к крутящему моменту, так как состояние больше склоняется к двухпроводному соединению с возрастающим сопротивлением в одной из двух фаз (поскольку используемое сопротивление ротора меньше, чем двухпроводное соединение). Таким образом, двухпроводное соединение обычно предпочтительнее, несмотря на его низкий крутящий момент. Торможение однофазным переменным током в основном применяется в крановых подъемниках.
(b) Торможение с самовозбуждением с использованием конденсаторов: В этом методе три конденсатора постоянно подключены к клеммам двигателя. Номиналы конденсаторов подобраны таким образом, чтобы при отключении от сети двигатель работал как асинхронный генератор с самовозбуждением. Тормозное подключение показано на рис. 6.18(а), а процесс самовозбуждения поясняется на рис. 6.18(б) для холостого хода. Кривая A представляет собой кривую намагничивания машины без нагрузки при заданной скорости, а линия B представляет ток через конденсаторы, равный 9.0005
Тормозное подключение показано на рис. 6.18(а), а процесс самовозбуждения поясняется на рис. 6.18(б) для холостого хода. Кривая A представляет собой кривую намагничивания машины без нагрузки при заданной скорости, а линия B представляет ток через конденсаторы, равный 9.0005
где E — индуцированное статором напряжение на фазу.
Конденсаторы обеспечивают необходимый реактивный ток для возбуждения. Операция происходит в точке C, которая является пересечением двух характеристик. Когда скорость падает, значение Е для того же тока намагничивания падает и получается новая характеристика намагничивания а. С другой стороны, наклон характеристики E vs I c увеличивается, что дает новую характеристику b . Пересечение двух кривых теперь происходит в точке c. Таким образом, уменьшение скорости при этом сдвигает кривые намагничивания вниз, наклон кривой зависимости напряжения конденсатора от тока увеличивается. При определенной критической скорости, которая обычно высока, две кривые не пересекаются, поэтому машина не самовозбуждается, и тормозной момент падает до нуля. Моментно-скоростная характеристика при самовозбуждающемся торможении показана на рис. 6.18(в).
Моментно-скоростная характеристика при самовозбуждающемся торможении показана на рис. 6.18(в).
Иногда к клеммам статора подключаются внешние резисторы для увеличения тормозного момента и рассеивания некоторой генерируемой энергии за пределами машины. Конструкция рис. 6.18 (b) действительна только для работы без нагрузки. Для более точного анализа следует учитывать падение импеданса двигателя. Эта схема используется редко, так как тормозной момент падает до нуля на скорости, которая обычно высока.
(c) Динамическое торможение постоянным током: Получается, когда статор асинхронного двигателя, работающего на высокой скорости, подключается к источнику постоянного тока. На рис. 6.19 показаны два обычно используемых соединения, двух- и трехпроводное, для статоров, соединенных звездой и треугольником.. Способ получения постоянного тока с помощью диодного моста для двухпроводного соединения показан на рис. 6.20.
Постоянный ток, протекающий через статор, создает стационарное магнитное поле. Движение ротора в этом поле индуцирует напряжение в обмотке ротора. Следовательно, машина работает как генератор. Генерируемая энергия рассеивается в сопротивлении цепи ротора, обеспечивая динамическое торможение асинхронного двигателя.
Движение ротора в этом поле индуцирует напряжение в обмотке ротора. Следовательно, машина работает как генератор. Генерируемая энергия рассеивается в сопротивлении цепи ротора, обеспечивая динамическое торможение асинхронного двигателя.
Поскольку поле стационарно, относительная скорость между проводниками ротора и полем теперь ω м . Частота индуцированного напряжения будет равна частоте напряжения источника переменного тока (или номинальной частоте двигателя), когда ω м = ω мс . Пусть напряжение, индуцируемое в роторе при работе на синхронной скорости, равно E r . При движении со скоростью ω м наведенное напряжение и его частота будут соответственно SE r и Sf. Затем
Это дает пофазную эквивалентную схему рис. 6.21 (a) для ротора. Разделив все величины на S, мы получим эквивалентную схему на номинальной частоте. Отнесение различных параметров эквивалентной схемы, полученной таким образом, к виткам статора дает пофазную эквивалентную схему ротора, показанную на рис. 6.21 (b). Эквивалентная схема статора при динамическом торможении асинхронного двигателя постоянного тока показана на рис. 6.21(c). Для объединения с эквивалентной схемой ротора на рис. 6.21(b) мы должны сначала получить пофазную эквивалентную схему статора при номинальной частоте. Эквивалентная схема Рис. 6.21 (c) предполагает, что МДС статора постоянна и не зависит от скорости. Поэтому мы предполагаем, что статор питается от трехфазного сбалансированного источника тока номинальной частоты, дающего фазный ток I с . Переменный ток I s будет эквивалентен I d при условии, что он создает МДС статора той же амплитуды, что и постоянный ток I d . Таким образом, мы заменяем статорную МДС, создаваемую постоянным током I d , на МДС (производимую I s ) той же амплитуды, но вращающуюся с синхронной скоростью. Разница этих двух МДС будет в МДС воздушного зазора, которая будет отвечать за создание потока в воздушном зазоре, который, в свою очередь, вызывает наведение напряжения E номинальной частоты в статоре.
6.21 (b). Эквивалентная схема статора при динамическом торможении асинхронного двигателя постоянного тока показана на рис. 6.21(c). Для объединения с эквивалентной схемой ротора на рис. 6.21(b) мы должны сначала получить пофазную эквивалентную схему статора при номинальной частоте. Эквивалентная схема Рис. 6.21 (c) предполагает, что МДС статора постоянна и не зависит от скорости. Поэтому мы предполагаем, что статор питается от трехфазного сбалансированного источника тока номинальной частоты, дающего фазный ток I с . Переменный ток I s будет эквивалентен I d при условии, что он создает МДС статора той же амплитуды, что и постоянный ток I d . Таким образом, мы заменяем статорную МДС, создаваемую постоянным током I d , на МДС (производимую I s ) той же амплитуды, но вращающуюся с синхронной скоростью. Разница этих двух МДС будет в МДС воздушного зазора, которая будет отвечать за создание потока в воздушном зазоре, который, в свою очередь, вызывает наведение напряжения E номинальной частоты в статоре. Таким образом, пофазная эквивалентная схема статора при номинальной частоте принимает вид, показанный на рис. 6.21 (d). Комбинируя эквивалентные схемы рис. 6.21(6) и (d), а удаление трансформатора дает номинальную частоту на фазную эквивалентную схему (рис. 6.21(e)).
Таким образом, пофазная эквивалентная схема статора при номинальной частоте принимает вид, показанный на рис. 6.21 (d). Комбинируя эквивалентные схемы рис. 6.21(6) и (d), а удаление трансформатора дает номинальную частоту на фазную эквивалентную схему (рис. 6.21(e)).
I′ r мало для малых S, и поэтому I m подходит к I s . Из-за большого значения I m происходит насыщение магнитопровода. Таким образом, X m не является постоянной величиной, а изменяется в зависимости от I m . Для точного анализа необходимо учитывать изменение X м с I м . Соотношение между I s и I d зависит от соединения статора. В качестве примера выведем его для двухпроводного соединения на рис. 6.19.(а). Здесь I A = I d и I B = – I d . Если N — эффективное число витков в каждой обмотке, то пиковая МДС, создаваемая фазой А, будет I d Н, а пиковая МДС, создаваемая фазой В, будет (-I d Н). Если предположить, что эти МДС синусоидально распределены в пространстве, пик результирующей МДС будет равен
Если предположить, что эти МДС синусоидально распределены в пространстве, пик результирующей МДС будет равен
При питании машины от сбалансированного источника трехфазного тока I s пик МДС статора равен
I s будет эквивалентно I d , когда F = F’. Следовательно, из уравнений (6.35) и (6.36)
Значения I s для других соединений (рис. 6.19 (б), (в) и (г) соответственно) равны:
рассчитывается следующим образом.
Из эквивалентной схемы рис. 6.21(д)
Рассмотрим распределение токов между параллельными ветвями, образованными Х м и ротором
Уравнение вычитания. (6.39) из (6.40) дает
Из уравнения (6.39)
Крутящий момент двигателя равен
Поскольку X м .2 Уравнение (6.38) — (6.42) — нелинейные алгебраические уравнения. Использование следующих шагов позволяет избежать необходимости численного решения. Примите значение I m , получите соответствующее значение E из характеристики намагничивания, рассчитайте X m по уравнению. (6.38), получаем I′ r из (6.41), вычислить S из (6.42), а затем ω m и T из уравнений (6.34) и (6.43) соответственно.
Примите значение I m , получите соответствующее значение E из характеристики намагничивания, рассчитайте X m по уравнению. (6.38), получаем I′ r из (6.41), вычислить S из (6.42), а затем ω m и T из уравнений (6.34) и (6.43) соответственно.
На рис. 6.22 показан характер кривых скорости и момента для двух значений сопротивления ротора. В двигателе с короткозамкнутым ротором или двигателе с фазным ротором без внешнего сопротивления в роторе максимальный крутящий момент возникает при низкой скорости. Хотя максимальный крутящий момент не зависит от сопротивления ротора, скорость, при которой возникает максимальный крутящий момент, увеличивается с увеличением сопротивления ротора. Когда требуется быстрое торможение, в цепь ротора включается сенсационное сопротивление, которое отключается при падении скорости. При использовании для удержания активной нагрузки, как в шахтных подъемных машинах, подключается большое сопротивление для получения кривых скорость-момент с отрицательным наклоном, чтобы обеспечить устойчивость в установившемся режиме.
(d) Торможение нулевой последовательности: При этом торможении три фазы статора соединены последовательно либо через однофазный источник переменного тока, либо через источник постоянного тока, как показано на рис. 6.23(a). Такое соединение известно как соединение нулевой последовательности , поскольку токи во всех обмотках статора синфазны. МДС, вызванная синфазными токами (или токами нулевой последовательности), создает магнитное поле с числом полюсов, в три раза превышающим число полюсов, для которых фактически намотана машина. При питании переменным током результирующее поле стационарно в пространстве и пульсирует с частотой питания. При подаче постоянного тока результирующее поле стационарно в пространстве и имеет постоянную величину. Важным преимуществом такого соединения является равномерная нагрузка всех фаз статора. Характер кривых скорость-момент для питания переменного и постоянного тока показан на рис. 6.23 (б). При питании переменным током торможение можно было использовать только до одной трети синхронной скорости. Однако тормозные моменты, создаваемые этим соединением, значительно больше, чем у двигателя. Двигатель по существу работает в режиме рекуперативного торможения. В двигателях с малым сопротивлением ротора рекуперируется значительная часть генерируемой энергии. В отличие от динамического торможения асинхронного двигателя переменного тока, он не требует большого сопротивления ротора и поэтому может использоваться как с короткозамкнутым, так и с короткозамкнутым ротором.
Однако тормозные моменты, создаваемые этим соединением, значительно больше, чем у двигателя. Двигатель по существу работает в режиме рекуперативного торможения. В двигателях с малым сопротивлением ротора рекуперируется значительная часть генерируемой энергии. В отличие от динамического торможения асинхронного двигателя переменного тока, он не требует большого сопротивления ротора и поэтому может использоваться как с короткозамкнутым, так и с короткозамкнутым ротором.
При отключенном питании торможение доступно во всем диапазоне скоростей. По сути, это динамическое торможение, поскольку вся генерируемая энергия тратится на сопротивление ротора. Механизм переключения от нормального трехфазного режима к режиму нулевой последовательности чрезвычайно прост, когда двигатель имеет статор, соединенный треугольником.
Цепь динамического торможения и обратного торможения асинхронного двигателя
12.03.2021
Инженер
ИНСТРУМЕНТ
0
Схемы динамического торможения и обратного торможения в трехфазном асинхронном двигателе. Когда трехфазный двигатель отключен от трехфазного источника питания, двигатель начнет замедляться, пока не достигнет нуля. Время торможения зависит от инерции нагрузки.
Когда трехфазный двигатель отключен от трехфазного источника питания, двигатель начнет замедляться, пока не достигнет нуля. Время торможения зависит от инерции нагрузки.
В некоторых приложениях требуется трехфазный асинхронный двигатель для быстрого замедления, особенно при управлении конвейером. Для быстрого снижения скорости двигателя используются два метода: механическое торможение и электрическое торможение.
Механические тормоза работают по принципу трения, удерживающего вращающийся вал в неподвижном состоянии. Следовательно, механический тормоз будет выделять тепло и вызывать механические потери. В этой статье мы узнаем только о некоторых типах электрических тормозов, таких как динамическое торможение и реверсивное торможение, рекуперативное торможение.
1. Методы электрического торможения
Трехфазный асинхронный двигатель работает по принципу электромагнитной индукции. Трехфазное напряжение, подаваемое на статор двигателя, создает вращающееся магнитное поле. Вращающееся магнитное поле является основной причиной силы, вращающей ротор двигателя.
Вращающееся магнитное поле является основной причиной силы, вращающей ротор двигателя.
Динамическое торможение — это метод быстрого снижения скорости двигателя путем создания стационарного магнитного поля. При подаче постоянного напряжения на обмотку статора двигателя создается стационарное магнитное поле, удерживающее ротор двигателя. Преимущество этой схемы в том, что она уменьшает механические потери.
Торможение задним ходом — это метод использования обратной проводки двигателя для создания крутящего момента для быстрой остановки двигателя. После того, как двигатель отключен от напряжения питания, двигатель вращается в противоположном направлении. Мы видим недостаток этой схемы в том, что она генерирует большой ток, когда двигатель реверсирует. Таким образом, этот метод подходит только для двигателей небольшой мощности.
Рекуперативное торможение обычно используется в преобразователях частоты. Когда инвертор отключает выход, двигатель работает как генератор, напряжение на двигателе возвращается на шину постоянного тока инвертора. Один подключит шину постоянного тока к тормозному резистору, чтобы рассеять энергию в виде тепла. Преимущество этого метода в том, что он эффективен и широко используется в промышленных схемах.
Один подключит шину постоянного тока к тормозному резистору, чтобы рассеять энергию в виде тепла. Преимущество этого метода в том, что он эффективен и широко используется в промышленных схемах.
2. Цепь динамического торможения
Формируемое стационарное магнитное поле зависит от соединения обмоток статора и величины постоянного напряжения, приложенного к статору.
Чем выше напряжение постоянного тока, тем больше ток протекает в статоре, поэтому напряжение напрямую влияет на тормозной момент. Ток не должен превышать номинальный ток обмоток двигателя.
Схема динамического тормоза
+ Когда переключатель SW замкнут, схема обеспечивает быструю остановку. Если переключатель SW разомкнут, время торможения двигателя зависит от момента инерции.
Напряжение переменного тока +220В выпрямляется в постоянный ток через диодный мост. Постоянное напряжение подается на обмотки двигателя через контактор К2.
+ Кнопка ON, OFF управляет размыканием и замыканием контакта K1.
+ Катушка К2 включена последовательно с нормально разомкнутым контактом кнопки ВЫКЛ и нормально замкнутым контактом таймера Т1. Следовательно, катушка К2 будет под напряжением, когда мы нажмем кнопку OFF. Затем катушка обесточивается через промежуток времени Т1.
Цепь динамического торможения
Принцип работы цепи динамического торможения:
+ При нажатии кнопки ВКЛ катушка К1 находится под напряжением, главный контакт контактора К1 замкнут. На двигатель подается трехфазное напряжение, поэтому двигатель начинает работать.
+ При нажатии кнопки ВЫКЛ контакт К1 возвращается в исходное состояние, двигатель перестает работать. В то же время контактор К2 находится под напряжением, поэтому на обмотки двигателя подается постоянное напряжение. Катушка таймера T1 также находится под напряжением, поэтому она начинает отсчет времени.
Напряжение постоянного тока, подаваемое на катушку, создает стационарное магнитное поле, удерживая ротор двигателя под контролем.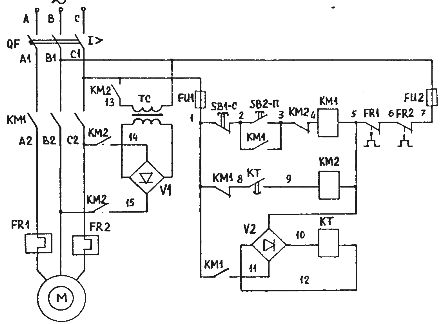 Мотор быстро останавливается.
Мотор быстро останавливается.
+ После того, как таймер отсчитает заданное время, нормально замкнутый контакт таймера размыкается и отключает катушку К2. Схема возвращается в исходное состояние.
См. видео о моделировании цепи динамического торможения
3. Цепь заднего тормоза
Схема цепи заднего тормоза
+ Динамическая цепь тормозной цепи заднего хода фактически представляет собой цепь заднего хода трехфазного двигателя. При замыкании контакта K_N происходит переключение двух проводов.
+ Две кнопки ON, OFF управления замыканием, размыканием цепи управления.
+ Нормально разомкнутый контакт кнопки ВЫКЛ, подключенный к катушке K_N.
+ Таймер T используется для настройки времени вращения двигателя в обратном направлении.
+ Тепловое реле для защиты двигателя от перегрузки.
Схема цепи обратного торможения
Принцип работы цепи обратного торможения:
Принцип работы цепи обратного торможения аналогичен схеме динамического торможения:
+ При нажатии кнопки ON контакт K_T замыкается закрыто. В это время на двигатель подается трехфазное напряжение, поэтому двигатель вращается в прямом направлении.
+ При нажатии кнопки OFF размыкается контакт K_T. И двигатель отключен от сети. Немедленно замкните контакт K_N, двигатель будет вращаться в противоположном направлении.
Одновременно подается питание на катушку таймера, начиная отсчет времени.
+ Когда таймер досчитывает заданное время, контакт T размыкается и отключает катушку K_N.
*** Обратите внимание, что целью схемы является управление быстрой остановкой двигателя. Если двигатель вращается в обратном направлении нежелательно. Поэтому контактор K_N не должен быть замкнут слишком долго, что приведет к вращению двигателя в обратном направлении.