Содержание
Управление частотным преобразователем, векторное, скалярное.
- 23.мар.2018
Компания Русэлком производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому для понимания принципа частотного управления рассмотрим более детально работу асинхронного двигателя и методы его частотного регулирования
Конструкция асинхронного двигателя схематически изображена на рис. 2. Двигатель состоит из неподвижной части, которая называется статор и подвижной (вращающейся) части называемой ротор.
В пазах статора уложены три группы обмоток А-В-С. Обмотки статора сдвинуты друг относительно друга в пространстве на угол 120°. Это является одним из двух обязательных условий для создания вращающегося магнитного поля статора.
Ротор двигателя изготовлен в виде цельного цилиндра из специальной электротехнической стали с короткозамкнутой обмоткой.
Рис. 2. Схематический разрез асинхронного двигателя.
2. Схематический разрез асинхронного двигателя.
На обмотки статора от источника питания подается трехфазное напряжение uа, uв, uс с частотой
Напряжения uа, uв, uс сдвинуты друг относительно друга по фазе на 120°. Это является вторым обязательным условием для создания вращающегося магнитного поля статора.
При питании обмоток статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Угловая скорость вращения этого поля в радианах определяется по известной формуле
– число пар полюсов статора.
Переход от угловой скорости вращения поля измеряемой в радианах, к частоте вращения выраженной в оборотах в минуту, осуществляется по следующей формуле
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Из формулы видно, что частота вращения магнитного поля статора зависит от частоты напряжения питания и числа пар полюсов.
К примеру, в двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц частота вращения магнитного поля равна 3000 об/мин.
В синхронном электрическом двигателе частота вращения ротора на установившемся режиме равна частоте вращения магнитного поля статора
В асинхронном электрическом двигателе частота вращения ротора на установившемся режиме отличается от частоты вращения на величину скольжения . Для примера в асинхронном двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц и при скольжении 5% частота вращения ротора равна 2850 об/мин.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где — постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1: 40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Векторное управление асинхронным двигателем | Техпривод
Преобразователь частоты регулирует момент и скорость вращения асинхронного двигателя, используя один из двух основных методов частотного управления — скалярный или векторный. Рассмотрим подробнее особенности этих методов.
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Квадратичная скалярная рабочая характеристика
В некоторых случаях, например, при работе преобразователя на мощные вентиляторы и насосы, используют квадратичную вольт-частотную характеристику с пониженным моментом, что позволяет учесть механику процесса, снизить токи, и, соответственно, потери на низких частотах.
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает. Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
Векторное управление без обратной связи
В этом случае частотный преобразователь вычисляет скорость вращения двигателя по математической модели на основе ранее введенных данных (параметров двигателя) и данных о мгновенных значениях тока и напряжения. Опираясь на полученные расчеты, ПЧ принимает решение об изменении выходного напряжения.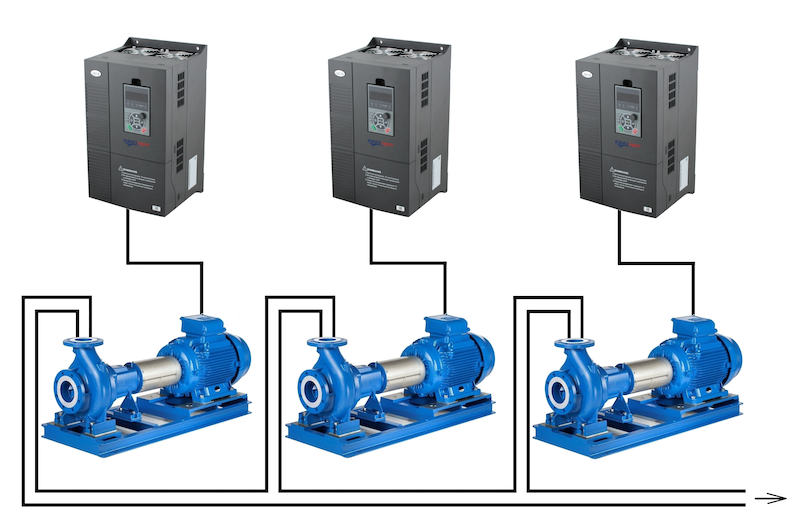
Перед включением векторного бессенсорного режима необходимо тщательно выставить номинальные параметры двигателя: напряжение, ток, частоту, скорость (обороты), мощность, количество полюсов, а также сопротивление обмоток и индуктивные параметры. Если какие-то значения неизвестны, рекомендуется провести автотестирование двигателя на холостом ходу. Некоторые модели векторных преобразователей частоты устанавливают параметры по умолчанию для стандартного двигателя после введения номинальных значений. Также необходимо задать пределы временных и токовых параметров векторного управления.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения.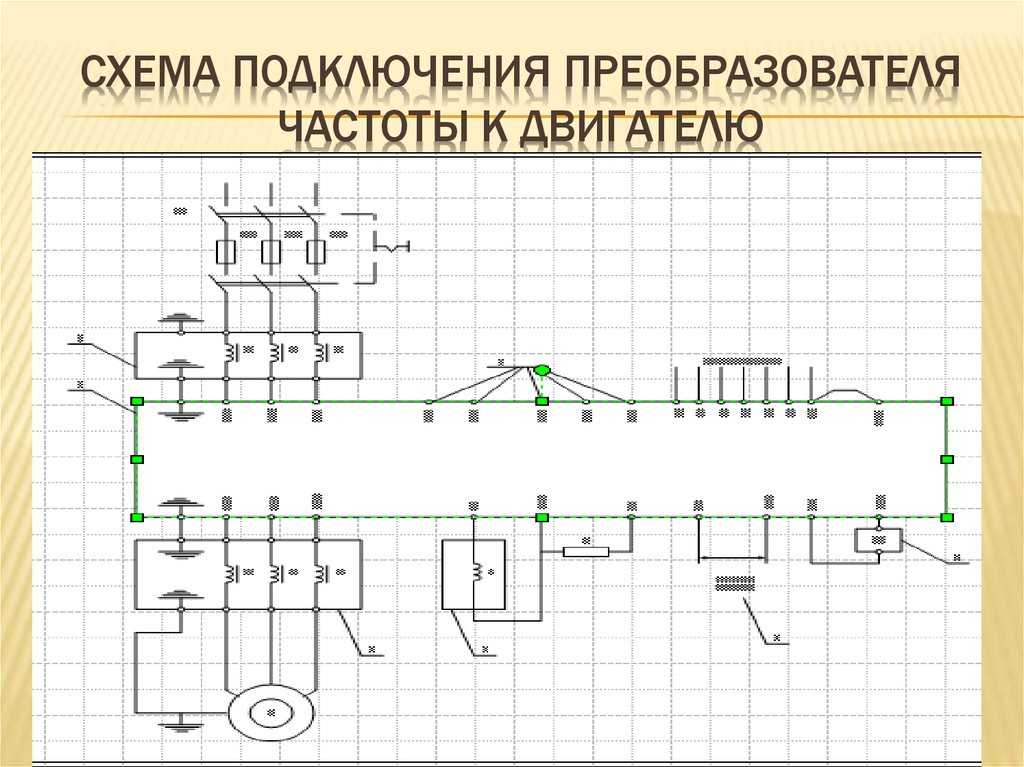 На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя. Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
Другие полезные материалы:
10 типичных проблем с частотниками
Тонкости настройки преобразователя частоты
Назначение и виды энкодеров
Методы управления преобразователем частоты.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существуют следующие основные способа управления:
1. Скалярное
· Скалярное управление U/f;
· Скалярное управление U/f с энкодером;
2. Векторное
· Векторное управление с разомкнутым контуром;
· Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
СКАЛЯРНОЕ РЕГУЛИРОВАНИЕ
Способ управления U/f
Скалярный метод управления асинхронным электродвигателем переменного тока, заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (U/f) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение U/f вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения U/f мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение U/f увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в невозбуждённом состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
U/f — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/f составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/f определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/f одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/f предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Способ управления U/f с энкодером
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Таким образом, если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/f.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/f минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/f. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Когда используется скалярное управлени
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для применений, где нет переменной нагрузки и отсутвуют высокие динамические нагрузки (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Недостатки скалярного управления
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
А процесс скалярного регулирования синхронного двигателя с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
· во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
· во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
· также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ
Векторное управление — метод управления бесщеточными электродвигателями переменного тока, который позволяет независимо и практически безынерционно регулировать скорость вращения и момент на валу электродвигателя.
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.
Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания и крутящего момента. Для достижения максимальной производительности, преобразователь частоты должен держать данные вектора разведенными на угол 900. Это существенно, так как sin 900 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Преимущества векторного управления:
· высокая точность регулирования скорости;
· плавный старт и плавное вращение двигателя во всем диапазоне частот;
· быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
· увеличенный диапазон управления и точность регулирования;
· снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
К недостаткам векторного управления можно отнести:
· необходимость задания параметров электродвигателя;
· большие колебания скорости при постоянной нагрузке;
· большая вычислительная сложность.
Сравнительная таблица методов управления частотным преобразователем.
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
| ||
 ru/motorcontrol/vector/#foc и http://engineering-solutions.ru/motorcontrol/vector/#dtc.
ru/motorcontrol/vector/#foc и http://engineering-solutions.ru/motorcontrol/vector/#dtc.
Список используемой литературы:
1. Botan Electric. «Как правильно выбрать метод управления преобразователем частоты?»:
http://elenergi.ru, 2016
2. Cristian Busca. «Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.»: Aalborg universitet, 2010
3. Bial Akin, «Nishant Garg. Scalar (V/f) control of 3-phase induction motors. Application report. SPRABQ8.- Dallas, USA.»: Texas Instruments
4. Статьи
http://engineering-solutions.ru
Частотно-регулируемый электропривод
21336
Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
Схема 1. Частотно-регулируемый привод.
Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно. За счет такого принципа действия частотно регулируемый привод может плавно регулировать параметры вращения двигателя.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.

- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.
- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.
- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.

- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
В результате:
Недостатки систем частотного регулируемого привода
- Создают сильные помехи, которые мешают другой электронике функционировать. Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
- Высокая стоимость ЧРП. Однако она окупится через 2-3 года.
 Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.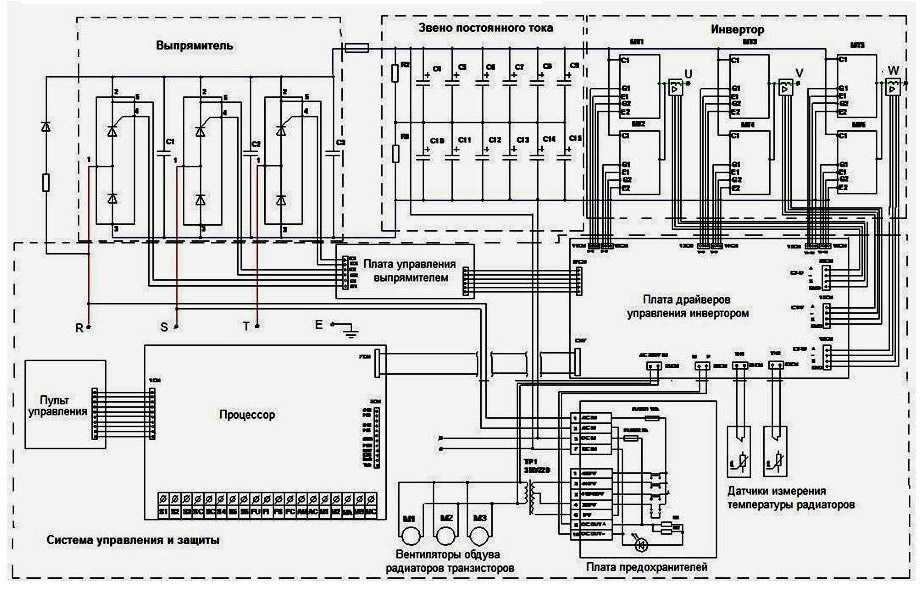
Пищевая промышленность: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ: различное насосное оборудование, АСУ.
Стройкомплекс: краны, подъемные механизмы.
Транспорт: судовой привод, электротранспорт.
Как выбрать частотный преобразователь
Следует принять во внимание:
- Мощность и разновидность асинхронного электродвигателя.
- Диапазон и точность регулировки скорости.
- Необходимость точного поддержания момента и скорости вращения на валу двигателя.
- Соответствие конструкции устройства персональным пожеланиям.
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте.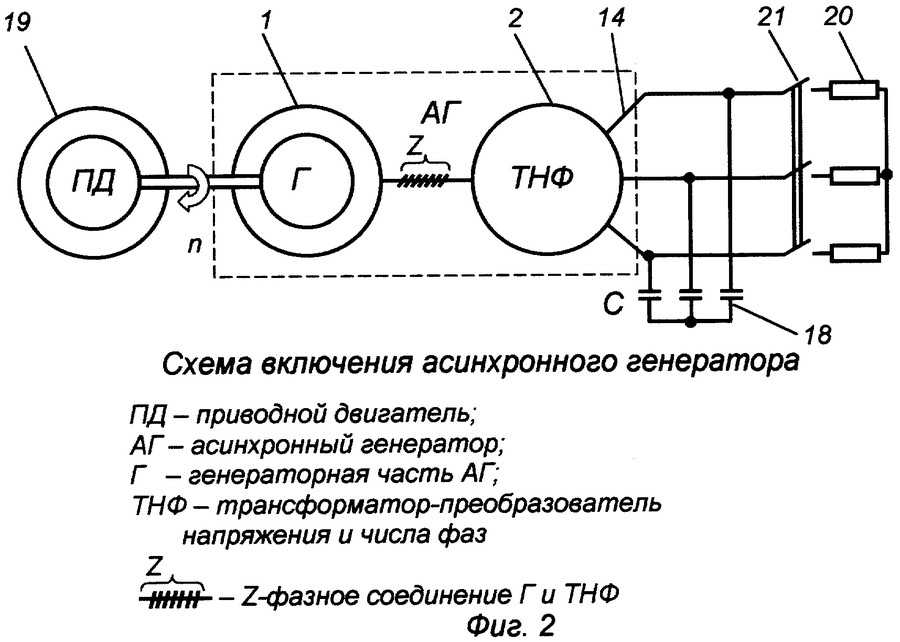 Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Строительный комплекс
Машиностроение
Жилищно-коммунальное хозяйство
Нефтегазовый комплекс
Химическая промышленность
Пищевая промышленность
Металлургия
преимущества векторного управления асинхронным двигателем
Линейная скалярная рабочая характеристика ПЧ
При работе асинхронного электродвигателя от скалярного частотного преобразователя напряжение на двигателе понижается линейно с понижением частоты. Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Это происходит из-за того, что применяется широтно-импульсная модуляция (ШИМ), при которой отношение действующего напряжения к частоте является константой во всем диапазоне регулирования.
Вольт-частотная (вольт-герцовая) рабочая характеристика ПЧ будет линейной, пока напряжение на возрастет до предела, определяемого напряжением питания преобразователя. Скалярное управление не позволяет двигателю развить требуемую мощность на низких частотах (мощность зависит от напряжения), и момент на валу сильно падает.
Квадратичная скалярная рабочая характеристика
В некоторых случаях, например, при работе преобразователя на мощные вентиляторы и насосы, используют квадратичную вольт-частотную характеристику с пониженным моментом, что позволяет учесть механику процесса, снизить токи, и, соответственно, потери на низких частотах.
Основной минус скалярной вольт-частотной характеристики
У линейной и квадратичной вольт-частотной зависимости, при её простоте и широком распространении, есть большой минус – падение мощности на валу, а значит падение момента и частоты вращения двигателя. При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
При этом происходит так называемое скольжение, когда частота вращения ротора отстает от частоты вращения электромагнитного поля.
Для устранения этого эффекта используется компенсация скольжения, позволяющая скорректировать выходную частоту (обороты двигателя) при возрастании момента нагрузки. Если правильно выбрать значение компенсации, фактическая скорость вращения при большой нагрузке будет приближаться к скорости вращения на холостом ходу.
Кроме этого, в большинстве ПЧ с линейной вольт-частотной характеристикой имеется функция компенсации момента на низких скоростях. Данная функция реализуется за счет повышения напряжения на низких частотах и при неправильном применении может вызвать перегрев двигателя.
Оба параметра компенсации имеют неизменное (установленное при настройке) значение и от нагрузки не зависят.
Преимущества векторного управления
Существует множество задач, когда нужно обеспечить заданную частоту вращения, и описанный недостаток становится очень актуальным. В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
В таких случаях применяют векторное частотное управление, при котором контроллер вычисляет напряжение, необходимое для поддержания момента, обеспечивающего стабильную частоту. В отличие от скалярного режима, здесь происходит «умное» управление магнитным потоком ротора.
Векторное управление асинхронным двигателем особенно актуально на низких частотах – ниже 10 Гц, когда рабочий момент двигателя сильно падает. Кроме того, данный метод позволяет держать стабильную скорость (с предсказуемым линейным изменением) при разгоне. Это достигается за счет получения высокого пускового момента вплоть до выхода двигателя на режим.
Важно и то, что при векторном управлении происходит сбережение электроэнергии (в некоторых случаях – до 60%), поскольку большую часть времени частотный преобразователь передает в двигатель ровно столько энергии, сколько необходимо для поддержания заданной скорости.
Различают два вида векторного управления — без датчика скорости (без обратной связи, или бессенсорное) и с обратной связью, когда в качестве датчика, как правило, используется энкодер.
Векторное управление без обратной связи
В этом случае частотный преобразователь вычисляет скорость вращения двигателя по математической модели на основе ранее введенных данных (параметров двигателя) и данных о мгновенных значениях тока и напряжения. Опираясь на полученные расчеты, ПЧ принимает решение об изменении выходного напряжения.
Перед включением векторного бессенсорного режима необходимо тщательно выставить номинальные параметры двигателя: напряжение, ток, частоту, скорость (обороты), мощность, количество полюсов, а также сопротивление обмоток и индуктивные параметры. Если какие-то значения неизвестны, рекомендуется провести автотестирование двигателя на холостом ходу. Некоторые модели частотных преобразователей устанавливают параметры по умолчанию для стандартного двигателя после введения номинальных значений. Также необходимо задать пределы временных и токовых параметров векторного управления.
Векторное управление с обратной связью
Этот режим отличается более высокой точностью управления скоростью двигателя. Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Обратную связь обеспечивает энкодер, который сопрягается с частотным преобразователем через дополнительный модуль.
Энкодер устанавливается на валу электродвигателя либо последующего механизма и передает данные о текущей частоте вращения. На основании полученной информации преобразователь меняет напряжение, момент и, соответственно, скорость двигателя.
Стоит добавить, что при больших динамических нагрузках (частых изменениях момента) и работе на пониженных скоростях рекомендуется применение принудительного охлаждения внешним вентилятором.
Ссылка на источник
Возврат к списку
Частотный преобразователь для электродвигателя — НТЦ Энерго-Ресурс
Недостатки механического регулирования оборотов ротора электродвигателя
Управление крутящим моментом двигателя посредством механических устройств не снижает пусковой ток двигателя и обладает малым диапазоном регулирования. К тому же, механические устройства — вариаторы при работе испытывают значительные механические нагрузки и подвержены износу. Это обуславливает высокую себестоимость по сравнению с преобразователями частоты, которые лучше адаптированы под частые перегрузки.
Это обуславливает высокую себестоимость по сравнению с преобразователями частоты, которые лучше адаптированы под частые перегрузки.
Частотные преобразователи подключаются непосредственно к двигателю, что позволяет исключить применение дополнительных механизмов. Также при необходимости преобразователь частоты может временно повысить скорость выше номинальной, в отличие от механического регулирования скорости, которое обычно ограничивает ее диапазон и сужает возможности в выборе режима функционирования электродвигателя.
Технические аспекты применения частотных преобразователей
В настоящее время, асинхронный электродвигатель стал основным устройством в большинстве электроприводов. Все чаще для управления им используется частотный преобразователь – инвертор с ШИМ регулированием. Такое управление дает массу преимуществ, но и создает некоторые проблемы выбора тех или иных технических решений. Попробуем разобраться в них более подробно.
Выбор мощности частотного преобразователя
При выборе мощности частотного преобразователя необходимо основываться не только на мощности электродвигателя, но и на номинальных токах и напряжениях преобразователя и двигателя. Дело в том, что указанная мощность частотного преобразователя относится только к эксплуатации его со стандартным 4-х полюсным асинхронным электродвигателем в стандартном применении.
Дело в том, что указанная мощность частотного преобразователя относится только к эксплуатации его со стандартным 4-х полюсным асинхронным электродвигателем в стандартном применении.
Реальные приводы имеют много аспектов, которые могут привести к росту токовой нагрузке привода, например, при пуске. В общем случае, применение частотного привода позволяет снизить токовые и механические нагрузки за счет плавного пуска. Например, пусковой ток снижается с 600% до 100-150% от номинального.
Работа привода на пониженной скорости
Необходимо помнить, что хотя частотный преобразователь легко обеспечивает регулирование по скорости 10:1, но при работе двигателя на низких оборотах мощности собственного вентилятора может не хватать. Необходимо следить за температурой двигателя и обеспечить принудительную вентиляцию.
Электромагнитная совместимость
Поскольку частотный преобразователь — мощный источник высокочастотных гармоник, то для подключения двигателей нужно использовать экранированный кабель минимальной длины. Прокладку такого кабеля необходимо вести на расстоянии не менее 100 мм от других кабелей. Это минимизирует наводки. Если нужно пересечь кабели, то пересечение делается под углом 90 градусов.
Прокладку такого кабеля необходимо вести на расстоянии не менее 100 мм от других кабелей. Это минимизирует наводки. Если нужно пересечь кабели, то пересечение делается под углом 90 градусов.
Питание от аварийного генератора
Плавный пуск, который обеспечивает частотный преобразователь позволяет снизить необходимую мощность генератора. Так как при таком пуске ток снижается в 4-6 раз, то в аналогичное число раз можно снизить мощность генератора. Но все равно, между генератором и приводом должен быть установлен контактор, управляемый от релейного выхода частотного привода. Это защищает частотный преобразователь от опасных перенапряжений.
Питание трехфазного преобразователя от однофазной сети
Трехфазные частотные преобразователи могут быть запитаны от однофазной сети, но при этом их выходной ток не должен превышать 50% от номинального.
Экономия электроэнергии и денег
Экономия происходит по нескольким причинам.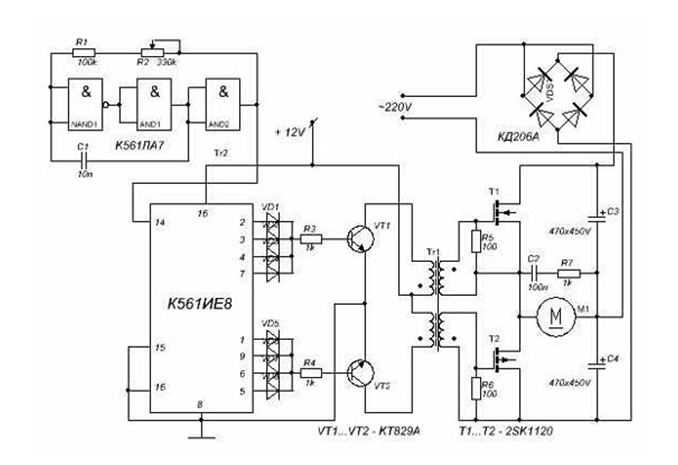 Во-первых, за счет роста косинуса фи до значений 0.98, т.е. максимум мощности используется для совершения полезной работы, минимум уходит в потери. Во-вторых, близкий к этому коэффициент получается на всех режимах работы электродвигателя.
Во-первых, за счет роста косинуса фи до значений 0.98, т.е. максимум мощности используется для совершения полезной работы, минимум уходит в потери. Во-вторых, близкий к этому коэффициент получается на всех режимах работы электродвигателя.
Без частотного преобразователя, асинхронные двигатели на малых нагрузках имеют косинус фи 0.3-0.4. В-третьих, нет необходимости в дополнительных механических регулировках (заслонках, дросселях, вентилях, тормозах и т.д.), все делается электронным образом. При таком устройстве регулирования, экономия может достигать 50%.
Синхронизация нескольких устройств
За счет дополнительных входов управления частотного привода можно синхронизировать процессы на конвейере или задавать соотношения изменения одних величин, в зависимости от других. Например, поставить в зависимость скорость вращения шпинделя станка от скорости подачи резца. Процесс будет оптимизирован, т.к. при увеличении нагрузки на резец, подача будет уменьшена и наоборот.
Защита сети от высших гармоник
Для дополнительной защиты, кроме коротких экранированных кабелей, используются сетевые дроссели и шунтирующие конденсаторы. Дроссель, кроме того, ограничивает бросок тока при включении.
Правильный выбор класса защиты
Для безотказной работы частотного привода необходим надежный теплоотвод. Если использовать высокие классы защиты, например IP 54 и выше, то трудно или дорого добиться такого теплоотвода. Поэтому, можно использовать отдельный шкаф с высоким классом защиты, куда ставить модули с меньшим классом и осуществлять общую вентиляцию и охлаждение.
Параллельное подключение электродвигателей к одному частотному преобразователю
С целью снижения затрат, можно использовать один частотный преобразователь для управления несколькими электродвигателями. Его мощность нужно выбирать с запасом 10-15% от суммарной мощности всех электродвигателей. При этом нужно минимизировать длины моторных кабелей и очень желательно ставить моторный дроссель.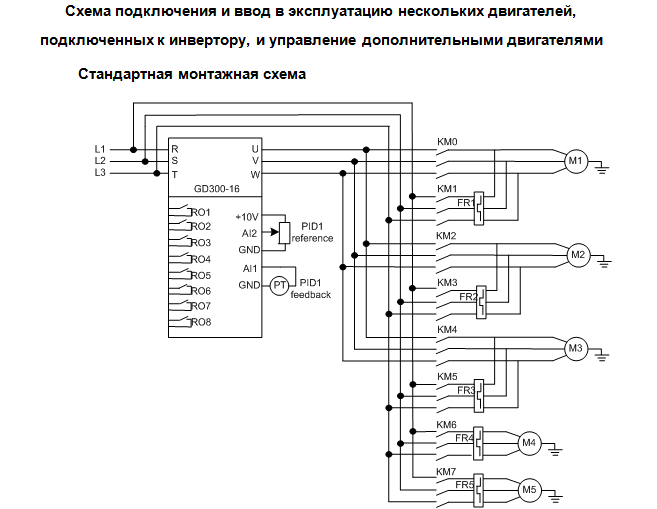
Большинство частотных преобразователей не допускают отключение или подключение двигателей с помощью контакторов во время работы частотного привода. Это производится только через команду «стоп» привода.
Задание функции регулирования
Для получения максимальных показателей работы электропривода, таких как: коэффициент мощности, коэффициент полезного действия, перегрузочная способность, плавность регулирования, долговечность, нужно правильно выбирать соотношение между изменением рабочей частоты и напряжения на выходе частотного преобразователя.
Функция изменения напряжения зависит от характера момента нагрузки. При постоянном моменте, напряжение на статоре электродвигателя должно регулироваться пропорционально частоте (скалярное регулирование U/F = const). Для вентилятора, например, другое соотношение – U/F*F = const. Если увеличиваем частоту в 2 раза, то напряжение нужно увеличить в 4 (векторное регулирование). Есть приводы и с более сложными функциями регулирования.
Преимущества использования регулируемого электропривода с частотным преобразователем
Кроме повышения КПД и энергосбережения такой электропривод позволяет получить новые качества управления. Это выражается в отказе от дополнительных механических устройств, создающих потери и снижающих надежность систем: тормозов, заслонок, дросселей, задвижек, регулирующих клапанов и т.д. Торможение, например, может быть осуществлено за счет обратного вращения электромагнитного поля в статоре электродвигателя. Меняя только функциональную зависимость между частотой и напряжением, мы получаем другой привод, не меняя ничего в механике.
Изучение документации
Следует заметить, что хотя частотные преобразователи похожи друг на друга и освоив один, легко разобраться с другим, тем не менее, необходимо тщательно изучать документацию. Некоторые производители накладывают ограничения на использование своей продукции, а при их нарушении снимают изделия с гарантии.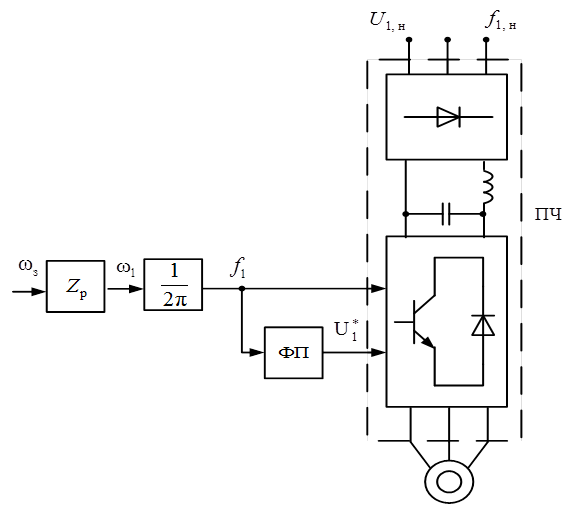
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Регулирование частоты асинхронного двигателя
Регулирование частоты асинхронного двигателя – Синхронная скорость, поэтому скорость двигателя можно регулировать, изменяя частоту питания. Напряжение, индуцируемое в статоре, пропорционально произведению частоты питания и потока в воздушном зазоре. Если пренебречь падением напряжения в статоре, напряжение на клеммах можно считать пропорциональным произведению частоты и магнитного потока.
Любое снижение частоты питания без изменения напряжения на клеммах вызывает увеличение потока в воздушном зазоре. Асинхронные двигатели предназначены для работы в точке перегиба характеристики намагничивания, чтобы в полной мере использовать магнитный материал. Следовательно, увеличение потока приведет к насыщению двигателя. Это приведет к увеличению тока намагничивания, искажению линейного тока и напряжения, увеличению потерь в сердечнике и медных потерях статора, а также к возникновению высокочастотного акустического шума.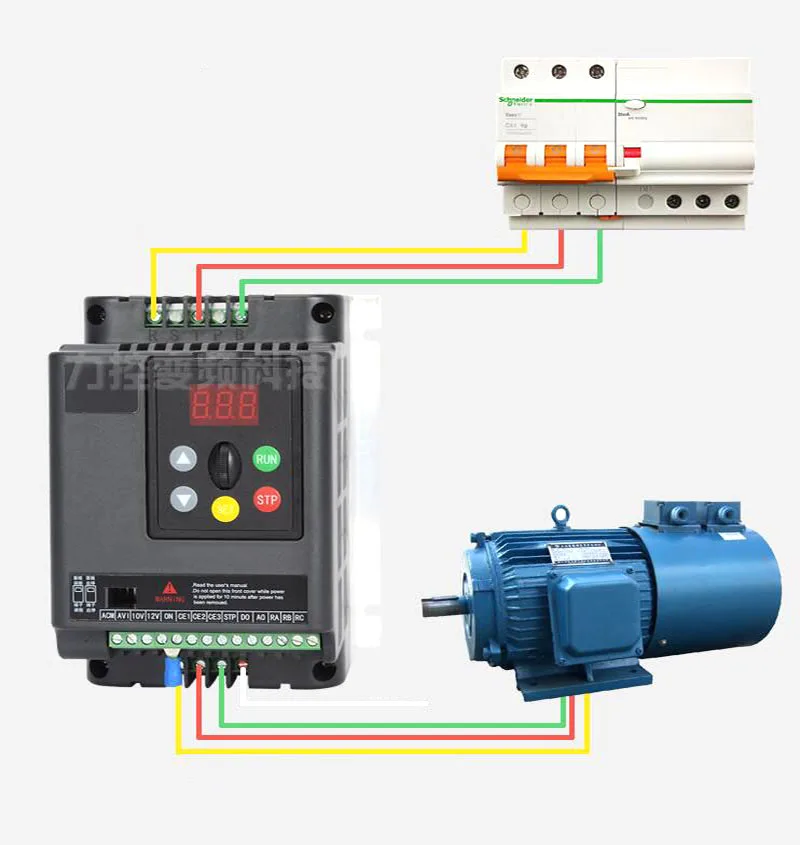 Хотя увеличение потока выше номинального значения нежелательно из-за учета эффектов насыщения, также следует избегать уменьшения потока, чтобы сохранить допустимый крутящий момент двигателя. Таким образом, регулирование частоты асинхронного двигателя ниже номинальной частоты обычно осуществляется при номинальном потоке в воздушном зазоре путем изменения напряжения на клеммах в зависимости от частоты, чтобы поддерживать постоянное отношение (V/f) на уровне номинального значения. Из уравнения (6.13)
Хотя увеличение потока выше номинального значения нежелательно из-за учета эффектов насыщения, также следует избегать уменьшения потока, чтобы сохранить допустимый крутящий момент двигателя. Таким образом, регулирование частоты асинхронного двигателя ниже номинальной частоты обычно осуществляется при номинальном потоке в воздушном зазоре путем изменения напряжения на клеммах в зависимости от частоты, чтобы поддерживать постоянное отношение (V/f) на уровне номинального значения. Из уравнения (6.13)
, где K — константа, а L s и L′ r — соответственно индуктивности статора и ротора относительно статора. Положительный знак соответствует двигательному режиму, отрицательный — тормозному режиму.
Когда частота не мала, (R s /f) ≪ 2π(L s + L′ r ) и, следовательно, из (6.69)
Уравнение (6.70) предполагает, что при (V/f), двигатель развивает постоянный максимальный крутящий момент, за исключением низких скоростей (или частот). Таким образом, двигатель работает в режиме постоянного крутящего момента. Согласно уравнению (6,69), для низких частот (или низких скоростей) из-за падения сопротивления статора [т.е. когда (R s /f) нельзя пренебречь по сравнению с 2π(L s + L’ r )], максимальный крутящий момент будет иметь более низкое значение в двигательном режиме (знак -Eve) и большее значение в режиме торможения ( -ве знак). Такое поведение связано с уменьшением потока во время работы двигателя и увеличением потока во время торможения. Когда требуется, чтобы тот же максимальный крутящий момент сохранялся на низких скоростях и в моторном режиме, отношение (V/f) увеличивается на низких частотах. Это вызывает дальнейшее увеличение максимального тормозного момента и значительное насыщение машины в режиме торможения.
Таким образом, двигатель работает в режиме постоянного крутящего момента. Согласно уравнению (6,69), для низких частот (или низких скоростей) из-за падения сопротивления статора [т.е. когда (R s /f) нельзя пренебречь по сравнению с 2π(L s + L’ r )], максимальный крутящий момент будет иметь более низкое значение в двигательном режиме (знак -Eve) и большее значение в режиме торможения ( -ве знак). Такое поведение связано с уменьшением потока во время работы двигателя и увеличением потока во время торможения. Когда требуется, чтобы тот же максимальный крутящий момент сохранялся на низких скоростях и в моторном режиме, отношение (V/f) увеличивается на низких частотах. Это вызывает дальнейшее увеличение максимального тормозного момента и значительное насыщение машины в режиме торможения.
Когда либо V достигает насыщения, либо достигает номинального значения при базовой скорости, его нельзя увеличивать с частотой. Следовательно, при скорости выше базовой частота изменяется при постоянном значении V. Согласно уравнению (6.70), при постоянном V максимальный крутящий момент уменьшается с увеличением частоты (или скорости).
Согласно уравнению (6.70), при постоянном V максимальный крутящий момент уменьшается с увеличением частоты (или скорости).
Таким образом, изменение напряжения на клеммах в зависимости от частоты показано на рис. 6.33(a). V поддерживается постоянным выше базовой скорости. Ниже базовой скорости отношение (V/f) поддерживается постоянным, за исключением низких частот, где отношение (V/f) увеличивается для поддержания постоянного максимального крутящего момента. Соответствующие кривые крутящего момента показаны на рис. 6.33(b) как для моторного режима, так и для режима торможения. Кривые показывают, что управление скоростью и операция торможения доступны от скорости, близкой к нулевой, до скорости, превышающей синхронную.
Заданный крутящий момент достигается при более низком токе, когда работа на любой частоте ограничена между синхронной скоростью и точкой максимального крутящего момента, как для двигателя, так и для торможения. Следовательно, работа двигателя для каждой частоты ограничена между синхронной скоростью и точкой максимального крутящего момента, как показано сплошными линиями на рис. 6.33(b).
6.33(b).
Регулятор частоты асинхронного двигателя обеспечивает хорошие рабочие и переходные характеристики благодаря следующим характеристикам:
- Управление скоростью и торможение доступны от нулевой скорости до скорости, превышающей базовую.
- Во время переходных процессов (пуск, торможение и реверсирование скорости) работа может выполняться при максимальном крутящем моменте с уменьшенным током, обеспечивающим хорошие динамические характеристики.
- Потери в меди низкие, а КПД и коэффициент мощности высокие, поскольку работа ограничена между синхронной скоростью и точкой максимального крутящего момента на всех частотах.
- Падение скорости от холостого хода до полной нагрузки небольшое.
Наиболее важным преимуществом частотно-регулируемого привода асинхронного двигателя является то, что он позволяет получить привод с регулируемой скоростью с вышеупомянутыми хорошими рабочими и переходными характеристиками от асинхронного двигателя с короткозамкнутым ротором. Двигатель с короткозамкнутым ротором имеет ряд преимуществ перед двигателем постоянного тока. Он дешевый, прочный, надежный и долговечный. Благодаря отсутствию коллектора и щеток он практически не требует обслуживания, может эксплуатироваться во взрывоопасной и загрязненной среде, может быть рассчитан на более высокие скорости, напряжение и мощность. Он также имеет меньшую инерцию, объем и вес. Хотя стоимость двигателя с короткозамкнутым ротором намного ниже по сравнению со стоимостью двигателя постоянного тока того же номинала, общая стоимость приводов с асинхронным двигателем с регулируемой частотой в целом выше. Но из-за перечисленных выше преимуществ приводы с асинхронными двигателями с регулируемой частотой предпочтительнее приводов с двигателями постоянного тока для большинства приложений. В специальных применениях, требующих необслуживаемой эксплуатации, таких как подземные и подводные установки, а также во взрывоопасных и загрязненных средах, таких как шахты и химическая промышленность, приводы с асинхронными двигателями с регулируемой частотой являются естественным выбором.
Двигатель с короткозамкнутым ротором имеет ряд преимуществ перед двигателем постоянного тока. Он дешевый, прочный, надежный и долговечный. Благодаря отсутствию коллектора и щеток он практически не требует обслуживания, может эксплуатироваться во взрывоопасной и загрязненной среде, может быть рассчитан на более высокие скорости, напряжение и мощность. Он также имеет меньшую инерцию, объем и вес. Хотя стоимость двигателя с короткозамкнутым ротором намного ниже по сравнению со стоимостью двигателя постоянного тока того же номинала, общая стоимость приводов с асинхронным двигателем с регулируемой частотой в целом выше. Но из-за перечисленных выше преимуществ приводы с асинхронными двигателями с регулируемой частотой предпочтительнее приводов с двигателями постоянного тока для большинства приложений. В специальных применениях, требующих необслуживаемой эксплуатации, таких как подземные и подводные установки, а также во взрывоопасных и загрязненных средах, таких как шахты и химическая промышленность, приводы с асинхронными двигателями с регулируемой частотой являются естественным выбором. У них есть несколько других применений, таких как тяга, прокатные столы, сталелитейные заводы, насосы, вентиляторы, воздуходувки, компрессоры, шпиндельные приводы, конвейеры, станки и так далее.
У них есть несколько других применений, таких как тяга, прокатные столы, сталелитейные заводы, насосы, вентиляторы, воздуходувки, компрессоры, шпиндельные приводы, конвейеры, станки и так далее.
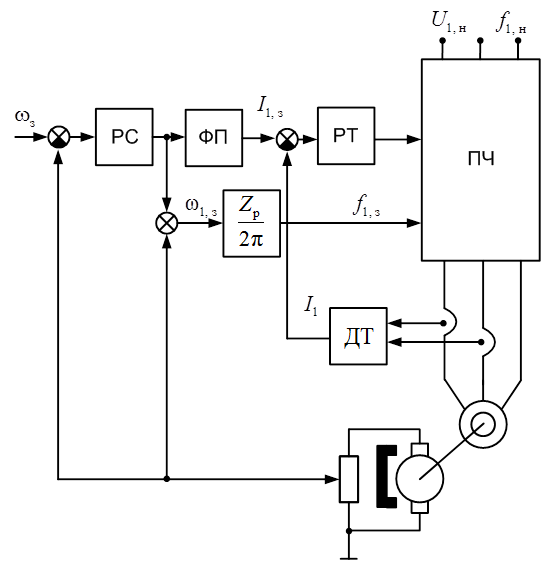
Блок-схема схемы частотно-регулируемого привода асинхронного двигателя показана на рис. 6.34. Двигатель питается от источника переменного напряжения переменной частоты (VFVS). V* и f* — команды напряжения и частоты для VFVS. Блок управления потоком выдает команду напряжения V* для VFVS, чтобы поддерживать взаимосвязь рис. 6.33(a) между V* и f*. Опорная частота f* изменяется на скорость управления. Цепь задержки введена между f* и fr, так что даже когда ft изменяется на большую величину, f* будет изменяться только медленно, так что скорость двигателя может отслеживать изменения ft, тем самым ограничивая работу двигателя для каждой частоты между синхронной скоростью и точка максимального крутящего момента. VFVS может быть инвертором источника напряжения или циклопреобразователем.
Контроль скорости скольжения:
Пусть V и f обозначают номинальное напряжение и частоту машины. Когда двигатель работает на скорости ниже базовой при постоянном (V/f) управлении, для частоты kf напряжение на клеммах будет равно kV, где k — такой коэффициент, что 0 ≤ k ≤ 1. Таким образом, поскольку частота меняется от 0 до f, k изменяется от 0 до 1, а напряжение изменяется от 0 до В.0003
В уравнениях. (6.71) и (6.72) если (ks) поддерживать постоянным при изменении k, то ток ротора I′ r и крутящий момент T останутся постоянными. Так как скольжение мало, I′ r будет в фазе с напряжением. Поскольку поток постоянен, I м также будет постоянным. Теперь
Таким образом, если двигатель работает при постоянном значении ks при изменении частоты, то двигатель будет работать при постоянном токе и крутящем моменте. Давайте рассмотрим значение кс.
При частоте kf
Примечание. Это также падение скорости двигателя по сравнению со скоростью без нагрузки, когда машина загружена.
Это также падение скорости двигателя по сравнению со скоростью без нагрузки, когда машина загружена.
Приведенное выше обсуждение показывает. что для любого значения T падение скорости двигателя от его скорости без нагрузки (kω мс ) одинаково для всех частот. Следовательно, характеристики крутящего момента скорости машины для 0 < s < s м — примерно параллельные кривые.
Работа машины с постоянной скоростью скольжения также подразумевает работу с постоянной частотой ротора, как показано ниже
, где f r и ω r — частота ротора в Гц и рад/сек соответственно.
Для s < s m , (R′ r /sk) >> (X s + X′ r ), отсюда из уравнений. (6.72) и (6.73)
Ур. (6.76) предполагает, что при s < s м кривые скорости и крутящего момента почти прямые. Поскольку они также параллельны, кривые скорость-момент представляют собой примерно параллельные прямые линии для s < s м .
Согласно приведенному выше обсуждению, для скорости скольжения ток и крутящий момент двигателя имеют одинаковые значения на всех частотах. Таким образом, током и крутящим моментом двигателя можно управлять, контролируя скорость скольжения. Кроме того, ток двигателя можно ограничить безопасным пределом, ограничив скорость скольжения. Это поведение используется в управлении скоростью с обратной связью для ограничения тока в допустимых пределах.
Теперь рассмотрим работу на скорости выше базовой. Как указывалось ранее, машина работает при постоянном напряжении V. Теперь
Поскольку частота выше номинальной k > 1. Поскольку работа снова ограничена между синхронной скоростью и максимальным крутящим моментом, скольжение имеет небольшое значение, следовательно,
Таким образом, для скоростей, превышающих базовую скорость, при данном I′ r и, следовательно, приблизительно при заданном I s скорость скольжения ω sl увеличивается линейно с k (или частотой). Это поведение используется в управлении скоростью с обратной связью для ограничения тока в пределах допустимого значения выше базовой скорости.
Это поведение используется в управлении скоростью с обратной связью для ограничения тока в пределах допустимого значения выше базовой скорости.
Поскольку проскальзывание мало, I′ r находится в фазе с V. Если пренебречь потерями в меди машины, развиваемая мощность P м будет равна
Следовательно, P м постоянна для данного I’ r и, следовательно, для данного I s . Таким образом, привод работает в режиме постоянной мощности.
Ограничения крутящего момента и мощности, а также режимы работы:
Изменения крутящего момента и мощности для заданного тока статора и для частот ниже и выше номинальной частоты показаны точками на рис. 6.35. Когда ток статора имеет максимально допустимое значение, они представляют максимальный крутящий момент и мощность двигателя при частотно-регулируемом приводе асинхронного двигателя.
Изменение максимального крутящего момента и мощности в зависимости от частоты показано на рис. 6.36. Изменение скорости скольжения ω sl с частотой также показаны на этом рисунке.
6.36. Изменение скорости скольжения ω sl с частотой также показаны на этом рисунке.
Как видно на рис. 6.35 и 6.36 двигатель имеет постоянный максимальный крутящий момент от нуля до базовой скорости ω mb , поэтому привод работает в режиме постоянного крутящего момента. В этом диапазоне частот V изменяется с частотой, как показано на рис. 6.33 (а), а скорость скольжения при максимально допустимом токе остается постоянной. От базовой скорости до скорости ω mc максимальная мощность имеет постоянное значение, поэтому двигатель работает в режиме постоянной мощности. При скорости ω mc (рис. 6.35), достигается опрокидывающий момент. Любая попытка запустить двигатель при максимально допустимом токе за пределами этой скорости приведет к остановке двигателя. Следовательно, за пределами скорости ω mc машина работает с постоянной скоростью скольжения, а максимально допустимый ток и максимальная мощность могут уменьшаться (рис. 6.36). Теперь ток двигателя уменьшается обратно пропорционально скорости, а крутящий момент уменьшается обратно пропорционально квадрату скорости. Работа в этой области требуется для приводов, требующих широкого диапазона скоростей, но низкого крутящего момента на высоких скоростях. Например, в тяговых приложениях привод работает в этой области при работе на полной скорости, потому что крутящий момент, необходимый в установившемся режиме на высоких скоростях, очень мал по сравнению с его значением при ускорении.
6.36). Теперь ток двигателя уменьшается обратно пропорционально скорости, а крутящий момент уменьшается обратно пропорционально квадрату скорости. Работа в этой области требуется для приводов, требующих широкого диапазона скоростей, но низкого крутящего момента на высоких скоростях. Например, в тяговых приложениях привод работает в этой области при работе на полной скорости, потому что крутящий момент, необходимый в установившемся режиме на высоких скоростях, очень мал по сравнению с его значением при ускорении.
Асинхронный двигатель для работы от преобразователя частоты — Двигатели VEM — Каталоги в формате PDF | Техническая документация
Добавить в избранное
{{requestButtons}}
Выдержки из каталога
VEM TECHNIK мы заставляем вещи двигаться В качестве синхронного двигателя для работы с питанием от преобразователя частоты мы заставляем вещи двигаться
Асинхронные двигатели с питанием от инвертора все чаще используются во всех промышленных приложениях важным является регулирование скорости приводных машин с малыми потерями, и поэтому должна быть реализована оптимальная адаптация скорости двигателя к технологическому процессу. Трехфазные двигатели VEM с короткозамкнутым ротором доступны в двух версиях, каждая из которых основана на размерах и типоразмерах IEC 60072 (соотношение типов см. в таблицах «Данные выбора двигателя» в текущем каталоге VEM). Двигатели K21R / K22R представляют собой классические согласованные серии IEC/DIN, т.е. согласование монтажных размеров…
Трехфазные двигатели VEM с короткозамкнутым ротором доступны в двух версиях, каждая из которых основана на размерах и типоразмерах IEC 60072 (соотношение типов см. в таблицах «Данные выбора двигателя» в текущем каталоге VEM). Двигатели K21R / K22R представляют собой классические согласованные серии IEC/DIN, т.е. согласование монтажных размеров…
Двигатели серии КВ.Р для выходного напряжения инвертора до ≤ 690 В Û ≤ 2,5 кВ Для двигателей серии КВ.Р используются высокоэффективные изоляционные материалы, которые обеспечат работу инвертора до 690 V без каких-либо методов фильтрации. Эта система изоляции рассчитана на импульсное напряжение до 2,5 кВ на клеммах двигателя. Система изоляции выполнена на основе медных проводов ЛФг (30) с лаковой изоляцией 1 сорта, обмотанных лентами из слюдяной фольги. За счет большей площади изоляционного материала уменьшено электрически активное пазовое пространство, поэтому двигатели исполнений КВ1Р,…
Рекомендации по проектированию двигателей для работы с преобразователем частоты Двигатели являются лишь частью сложной системы электропривода. В случае неправильной конструкции системы привода в первую очередь виноват двигатель, а с учетом неправильного проектирования элементов приводной передачи пострадают также муфты и ременные шкивы. Современные инверторы защищают себя и двигатель от тепловой перегрузки. Но они не обнаруживают чрезмерных скачков напряжения на клеммах двигателя. Для приводной системы проблемы могут возникнуть из-за отсутствия технологий фильтрации на выходе инвертора и/или из-за…
В случае неправильной конструкции системы привода в первую очередь виноват двигатель, а с учетом неправильного проектирования элементов приводной передачи пострадают также муфты и ременные шкивы. Современные инверторы защищают себя и двигатель от тепловой перегрузки. Но они не обнаруживают чрезмерных скачков напряжения на клеммах двигателя. Для приводной системы проблемы могут возникнуть из-за отсутствия технологий фильтрации на выходе инвертора и/или из-за…
Пределы двигателя для непрерывной работы Планирование приводов с регулируемой скоростью требует знания как крутящего момента или выходной мощности по скорости приводимой машины, так и самого двигателя. В диапазоне скоростей ниже номинальной скорости двигателя необходимо соблюдать момент для продолжительной работы (предельный момент), а для скорости выше номинальной скорости двигателя необходимо учитывать приведенный опрокидывающий момент. Предоставляемый крутящий момент зависит как от двигателя (конструкция, метод охлаждения и т. д.), так и от преобразователя (параметры, частота импульсов, процедура модуляции, мощность…
д.), так и от преобразователя (параметры, частота импульсов, процедура модуляции, мощность…
Омическое сопротивление статора для небольших двигателей Для двигателей с меньшей мощностью необходимо все больше учитывать относительно высокое омическое сопротивление статора. Для нижнего диапазона частот необходимо компенсировать это явление непропорционально большим увеличением выходного напряжения инвертора (компенсация IxR). Благодаря этой мере обеспечивается безопасное ускорение двигателя под нагрузкой до требуемой скорости. Опрокидывающий момент При работе двигателя в диапазоне ослабления поля (при постоянном напряжении вдоль расчетной частоты двигателя) опрокидывающий момент уменьшается прямоугольно с увеличением…
Данные для выбора двигателя Двигатели с короткозамкнутым ротором, питание от инвертора без проводки инвертора (dU/dt-фильтр, синус-фильтр), U < 690 В ( U > 1,8 кВ < 2,5 кВ) с поверхностной вентиляцией, режим режима работы S1, длительная работа, класс изоляции F, степень защиты IP 55 Синхронная скорость 3000 м/с - 2-полюсный Приведенные токи относятся к выходному напряжению инвертора 690 В Vorlaufige technische Daten.
Данные для выбора двигателя Двигатели с короткозамкнутым ротором, питание от инвертора без проводки инвертора (фильтр dU/dt, синус-фильтр), U < 690 В ( U > 1,8 кВ < 2,5 кВ) с поверхностной вентиляцией, режим работы S1, класс изоляции F при длительном режиме работы, степень защиты IP 55 Синхронная скорость 1000 м/с - 6-полюсный Предварительные технические данные.
Все каталоги двигателей VEM и технические брошюры
Современные приводные решения для погрузочно-разгрузочных работ
4 страницы
Современные приводные решения для вентиляторов и воздуходувок
4 страницы
Современные приводные решения для насосов
4 страницы
РЕШЕНИЯ ДЛЯ ВЕТРОЭНЕРГЕТИКИ
12 страниц
Низковольтные двигатели и генераторы VEM Прайс-лист 2016
91 страниц
ГОРЯЧАЯ ЛИНИЯ 2016
34 страницы
Индивидуальные системные решения для всех областей применения
16 страниц
Каскад подсинхронного преобразователя SCC
8 страниц
Решения по автоматизации и приводу до 28 МВт
4 страницы
Низковольтные двигатели для класса Premium Efficiency IE3; от 200 кВт до 1000 кВт
4 страницы
VEMoDRIVE Compact
4 страницы
Двигатели для использования на борту судов
4 страницы
Синхронные и асинхронные генераторы, приводы рыскания
8 страниц
Двигатели для использования с преобразователем частоты
4 страницы
Двигатели с переключением полюсов
4 страницы
Энергосберегающие двигатели, разработанные для класса Premium Efficiency IE3
4 страницы
Энергосберегающие двигатели, рассчитанные на высокую эффективность IE2
4 страницы
Электрические машины для промышленности
10 страниц
Электрические машины для судостроения
13 страниц
Энергосберегающие двигатели
4 страницы
Трехфазные асинхронные компактные приводы
24 страницы
Размеры
36 страниц
Асинхронные двигатели низкого напряжения Двигатели IEC с короткозамкнутым ротором
136 страниц
Асинхронные двигатели низкого напряжения Судовые двигатели
36 страниц
Асинхронные двигатели низкого напряжения Двигатели IEC с короткозамкнутым ротором
78 Страницы
Асинхронные двигатели низкого напряжения Двигатели IEC с короткозамкнутым ротором
101 страниц
Асинхронные двигатели низкого напряжения
62 страницы
Новости энергоэффективности
6 страниц
ДВИГАТЕЛИ ГЕНЕРАТОРЫ ПРИВОДЫ
4 страницы
ГОРЯЧАЯ ЛИНИЯ 2012
18 страниц
Двигатели с тормозом
4 страницы
Двигатели рольганга
4 страницы
мы движемся вперед
3 страницы
Двигатели для механических вентиляторов дымо- и теплоудаления
4 страницы
Двигатель вентилятора, судовое исполнение
4 страницы
Стандартные двигатели
4 страницы
Архивные каталоги
Трехфазные асинхронные двигатели
26 страниц
Ветрогенераторы для ветряных электростанций
8 страниц
Двигатели асинхронные трехфазные низкого напряжения с короткозамкнутым ротором
217 страниц
Сравнить
Удалить все
Сравнить до 10 продуктов
Скоростно-моментные характеристики асинхронного двигателя методом управления частотой в MATLAB
Семинары
Проекты
Блоги
Careers
Наем из США
для бизнеса / университетов
Корпоративные тренировки
Академические роты
Все годы
Выберите ATACERILLING
.
Все курсы / undefined
Все курсы / undefined / undefined
Загрузка…
Семинары
ДЛЯ БИЗНЕСА
Повышение квалификации
ДЛЯ ВУЗОВ
Академическое обучение
Аренда у нас
Проекты
Мы нанимаем!
ЦЕЛЬ: Изучить, чем работа асинхронного двигателя похожа на механическую муфту. Для расчета времени запуска привода с заданными параметрами. Объяснить стабильность привода с заданными параметрами. Создайте файл сценария MATLAB, который будет отображать характеристики скорость-крутящий момент для метода управления частотой. ЦЕЛЬ: Как…
HTML
MATLAB
Детали проекта
Загрузка…
Оставить комментарий
Спасибо, что решили оставить комментарий. Пожалуйста, имейте в виду, что все комментарии модерируются в соответствии с нашей политикой комментариев, и ваш адрес электронной почты не будет опубликован по соображениям конфиденциальности.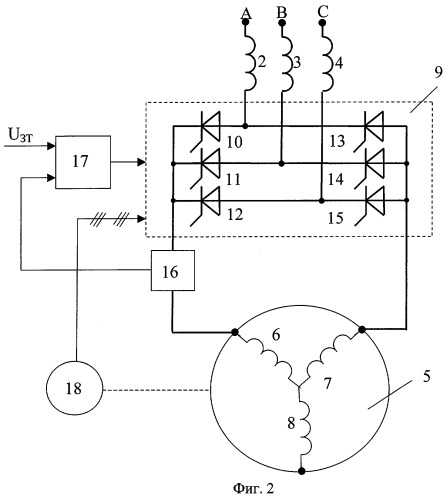 Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, войдите, чтобы добавить комментарий
Другие комментарии…
Комментариев пока нет!
Будьте первым, кто оставит комментарий
Подробнее Проекты Омкара Кудалкара (29)
Неделя 1 Понимание различных химических элементов аккумуляторов
Цель:
Аннотация: Литий-ионный аккумулятор является одним из наиболее Характеристики высокой плотности энергии, удельной мощности, длительного срока службы и экологичности. С развитием технологии литий-ионных аккумуляторов в конструкции были использованы различные материалы…
14 Dec 2021 02:03 IST
Читать дальше
Неделя 8 Задача: управление температурным режимом
Задача:
Резюме: Функции управления современными автомобилями становятся все более и более сложными.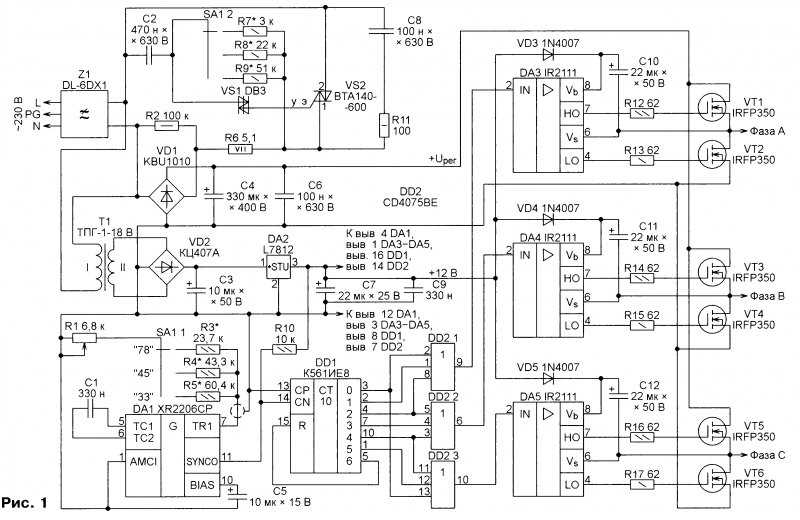 Программирование сложных встроенных систем включает в себя анализ сложных системных взаимодействий на путях между датчиками, исполнительными механизмами и управляющими процессорами. Это трудоемкий и подверженный ошибкам процесс. Кроме того,…
Программирование сложных встроенных систем включает в себя анализ сложных системных взаимодействий на путях между датчиками, исполнительными механизмами и управляющими процессорами. Это трудоемкий и подверженный ошибкам процесс. Кроме того,…
30 сент. 2021 05:06 IST
Подробнее
UML (унифицированный язык моделирования) схема высокого уровня системы игрушечной машинки с дистанционным управлением.
Objective:
Abstract: Функции управления современными автомобилями становятся все более сложными. Программирование сложных встроенных систем включает в себя анализ сложных системных взаимодействий на путях между датчиками, исполнительными механизмами и управляющими процессорами. Это трудоемкий и подверженный ошибкам процесс. Кроме того, в результате…
30 сент. 2021 04:45 IST
Подробнее
Объясните технологии охлаждения силового преобразователя, а также расчет теплового сопротивления полевого МОП-транзистора и рассеиваемой мощности.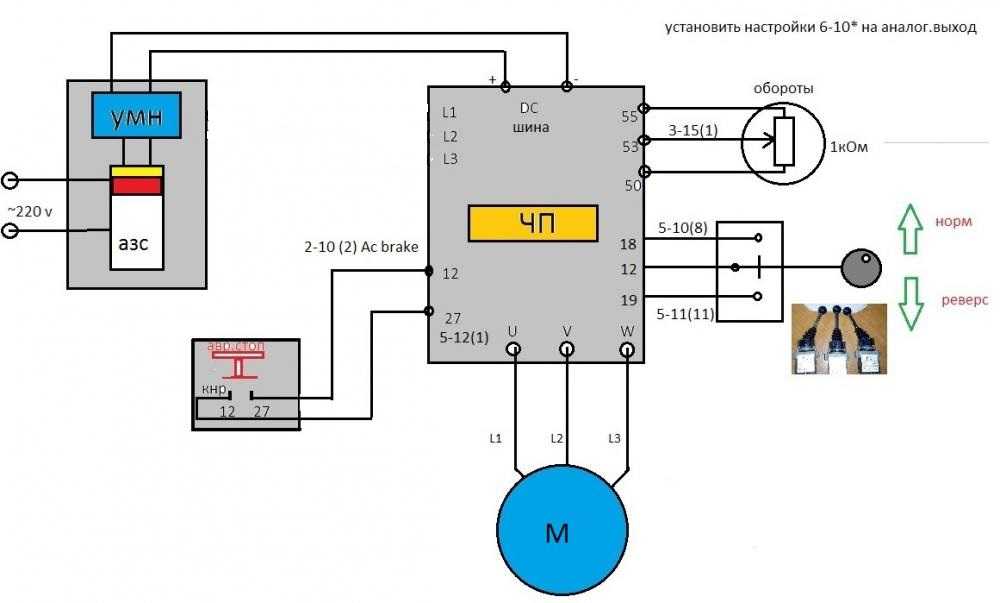
Цель:
Объяснить технологию охлаждения силового преобразователя? Аннотация: Устройства силовой электроники, такие как MOSFET, GTO, IGBT, IGCT и т. д., в настоящее время широко используются для эффективной подачи электроэнергии в бытовую электронику, промышленные приводы, телекоммуникации, транспорт, электрические сети и многие другие приложения.…
30 сентября 2021 г. 04 :41 AM IST
Подробнее
Псевдокод для отображения скорости на цифровой приборной панели в соответствии с заданными условиями.
Задача:
1 Напишите псевдокод для отображения скорости на цифровой приборной панели в соответствии с указанными ниже условиями. Обновляйте отображаемую скорость каждую секунду, Включайте индикатор высокой эффективности от 50 до 60 км/ч, Включайте индикатор безопасного движения выше 80 км/ч. Псевдокод — это неофициальный…
Псевдокод — это неофициальный…
22 сент. 2021 07:36 IST
Подробнее
Связь в системе управления батареями (BMS) и различные типы режимов передачи (последовательной связи) с помощью примеров в реальном времени.
Objective:
Abstract— Грядущее пересечение растущего парка электрифицированных транспортных средств и желаемого роста производства электроэнергии из возобновляемых источников открывает возможности для синергетического эффекта. Интеллектуальная сеть — это новая концепция эксплуатации и управления электроснабжением, которая позволит потребителям и коммунальным службам лучше контролировать…
22 сент. 2021 07:36 IST
Подробнее
Вывести Передаточную функцию системы подвески автомобиля и преобразовать в формат пространства состояний с помощью MATLAB.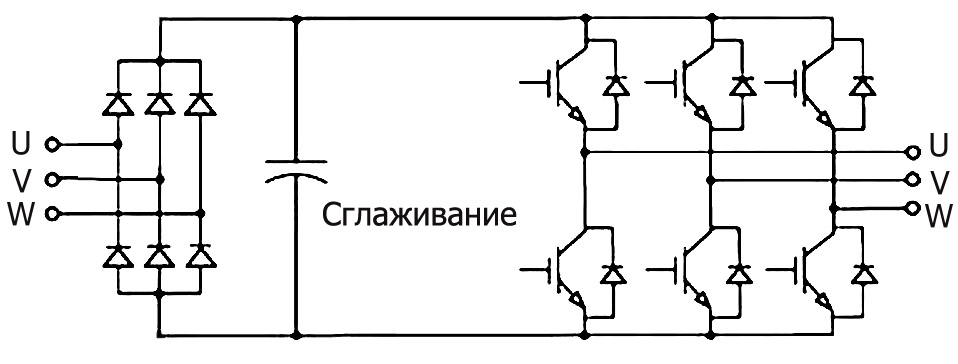
Задача:
ЦЕЛЬ: Получить передаточную функцию системы подвески автомобиля и преобразовать ее в формат пространства состояний с помощью MATLAB. ЗАДАЧИ: Как гибридные электромобили могут эксплуатироваться более эффективно с помощью автономных систем вождения? a.) Получите передаточную функцию системы подвески, показанной ниже. Примечание. Масса m1 соответствует…
05 Jul 2021 09:57 IST
- MATLAB
Подробнее
Проект-1: Силовой агрегат для самолетов на взлетно-посадочных полосах
Цель:
ИЗУЧЕНИЕ САМОЛЕТА, ПАРАМЕТРОВ И ОЦЕНКА МОЩНОСТИ, НЕОБХОДИМОЙ ДЛЯ БУКСИРОВКИ САМОЛЕТА: ЦЕЛЬ: Перечислить общий вес различных типов самолетов. Изучить разницу между путевой скоростью и воздушной скоростью. Объяснить, почему не рекомендуется использовать мощность двигателя самолета для его перемещения по земле в аэропорту. …
…
04 июля 2021 23:30 IST
- КОНСТРУКЦИЯ
Подробнее
ИЗУЧЕНИЕ ЛА, ПАРАМЕТРОВ И ОЦЕНКА МОЩНОСТИ, НЕОБХОДИМОЙ ДЛЯ БУКСИРОВКИ САМОЛЕТА
Цель:
ИЗУЧЕНИЕ САМОЛЕТА, ПАРАМЕТРОВ И ОЦЕНКА МОЩНОСТИ, НЕОБХОДИМОЙ ДЛЯ БУКСИРОВКИ САМОЛЕТА: ЦЕЛЬ: Перечислить общий вес различных типов самолетов. Изучить разницу между путевой скоростью и воздушной скоростью. Объяснить, почему не рекомендуется использовать мощность двигателя самолета для его перемещения по земле в аэропорту.…
09 июня 2021 г. 13:20 IST
- ДИЗАЙН
Подробнее
ХАРАКТЕРИСТИКИ АИНХ. ИНВЕРТОРНОЙ ВОЛНЫ
Цель:
ЦЕЛИ: Обсудить эквивалентную схему сети модели MATLAB асинхронного двигателя. Трехфазный асинхронный двигатель с частотой 50 Гц, представленный эквивалентными константами цепи X1 = X2 = 0,1 Ом и R1 = R2 = 0,2 Ом, работает при половине номинального напряжения и частоты. Рассчитайте отношение пускового момента при половинном напряжении и…
Трехфазный асинхронный двигатель с частотой 50 Гц, представленный эквивалентными константами цепи X1 = X2 = 0,1 Ом и R1 = R2 = 0,2 Ом, работает при половине номинального напряжения и частоты. Рассчитайте отношение пускового момента при половинном напряжении и…
11 мая 2021 г. 01:41 IST
- MATLAB
Читать далее
Характеристики крутящего момента асинхронного двигателя методом управления частотой в MATLAB
Цель:
ЦЕЛЬ: изучить, чем работа асинхронного двигателя похожа на механическое сцепление. Для расчета времени запуска привода с заданными параметрами. Объяснить стабильность привода с заданными параметрами. Создайте файл сценария MATLAB, который будет отображать характеристики скорость-крутящий момент для метода управления частотой. ЦЕЛЬ : Как…
05 May 2021 01:35 IST
- HTML
- MATLAB
Подробнее
Цель:
ЦЕЛЬ: Изучить тип цепей силового преобразователя и определить установившуюся скорость трансмиссии электромобиля. ЗАДАЧИ: Выяснить, какие схемы преобразователя мощности используются в электрических и гибридных электромобилях. Силовой агрегат электромобиля с аккумуляторной батареей 72 В…
ЗАДАЧИ: Выяснить, какие схемы преобразователя мощности используются в электрических и гибридных электромобилях. Силовой агрегат электромобиля с аккумуляторной батареей 72 В…
18 апр. 2021 05:14 IST
- HEV
- MATLAB
- MBD
Привод Challenge 9 WeekEV: 9072-6070003
Цель:
ЦЕЛЬ: Изучить тип цепей силового преобразователя и определить установившуюся скорость трансмиссии электромобиля. ЗАДАЧИ: Выяснить, какие схемы преобразователя мощности используются в электрических и гибридных электромобилях. Силовая схема электромобиля с аккумулятором 72 В…
18 апреля 2021 05:13 AM IST
- HEV
- MATLAB
- MBD
Прочитайте больше
Исследование круга Спиду.0003
Задача:
ЦЕЛЬ – Разработать код MATLAB для машины постоянного тока и визуализировать ее характеристики скорости и крутящего момента.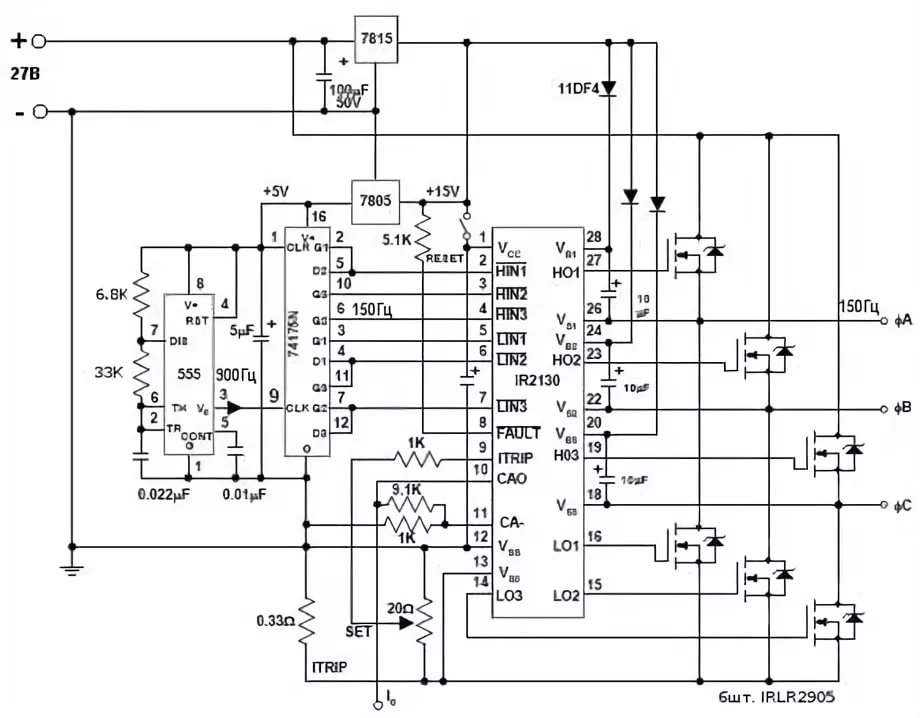 Различают кабели, используемые в электропроводке ГЭМ. Кратко о высоком и низком напряжении в электромобилях. ВВЕДЕНИЕ: Машина постоянного тока представляет собой электромеханическое устройство для преобразования энергии. Принцип работы…
Различают кабели, используемые в электропроводке ГЭМ. Кратко о высоком и низком напряжении в электромобилях. ВВЕДЕНИЕ: Машина постоянного тока представляет собой электромеханическое устройство для преобразования энергии. Принцип работы…
11 апр. 2021 23:55 IST
- HEV
- MATLAB
Подробнее вместимость.
Цель:
ЦЕЛЬ:- Моделирование преодолеваемого подъема и ездового цикла с помощью ADVISOR TOOL в MATLAB PLATFORM. ИСПОЛЬЗУЕМАЯ:- MATLAB- TOOL ADVISOR Software – Microsoft Office Excel. СИСТЕМНЫЕ ХАРАКТЕРИСТИКИ: — Производитель — Модель Acer — Операционная система ASPIRE E1-531 — Процессор Windows 7 Ultimate — Процессор Intel (R) Pentium (R)…
27 марта 2021 г. 20:41 IST
- MATLAB
Подробнее
Сила, действующая на транспортное средство
Цель:
ЦЕЛЬ: Рассчитать максимальную скорость транспортного средства и мощность двигателя.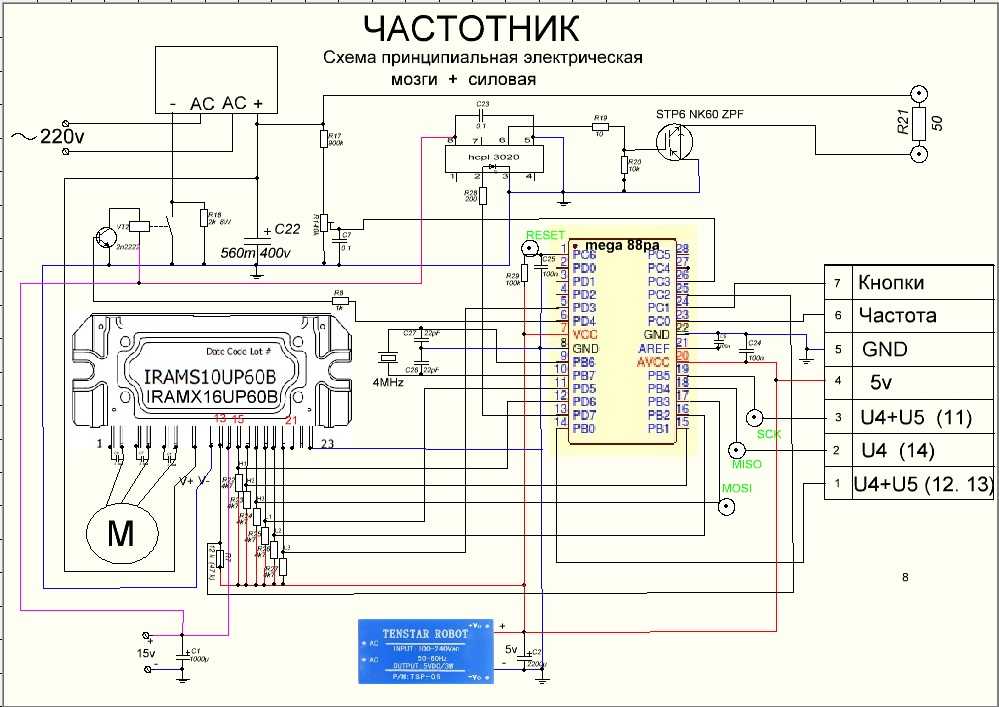 ИСПОЛЬЗУЕМАЯ ПЛАТФОРМА: Программное обеспечение — Microsoft Office Excel. ХАРАКТЕРИСТИКИ СИСТЕМЫ: Производитель — модель Acer — ASPIRE E1-531 Операционная система — процессор Windows 7 Ultimate — процессор Intel(R) Pentium(R) B960 @ 2,20 ГГц 20 ГГц…
ИСПОЛЬЗУЕМАЯ ПЛАТФОРМА: Программное обеспечение — Microsoft Office Excel. ХАРАКТЕРИСТИКИ СИСТЕМЫ: Производитель — модель Acer — ASPIRE E1-531 Операционная система — процессор Windows 7 Ultimate — процессор Intel(R) Pentium(R) B960 @ 2,20 ГГц 20 ГГц…
14 марта 2021 г. 21:40 IST
Подробнее
Реализация логики управления для (изменения крутящего момента) переключения передач с использованием StateFlow.
Цель:
ЦЕЛЬ :- Создать StateFlow для переключения передач и изменять скорость в качестве входных данных и получать выходные данные в виде числа передач на дисплее. ЗАДАЧИ: — Создайте диаграмму Simulink для логики «Переключения передач» в соответствии со следующими условиями: Диапазон скоростей (км/ч) Передача от 0 до 15 …
07 марта 2021 г. 20:54 IST
Подробнее
Программирование полностью автоматизированной стиральной машины с использованием модели Simulink и логики управления StateFlow
Цель:
ЦЕЛЬ: Реализовать логику управления «стиральной машиной» с использованием потока состояний.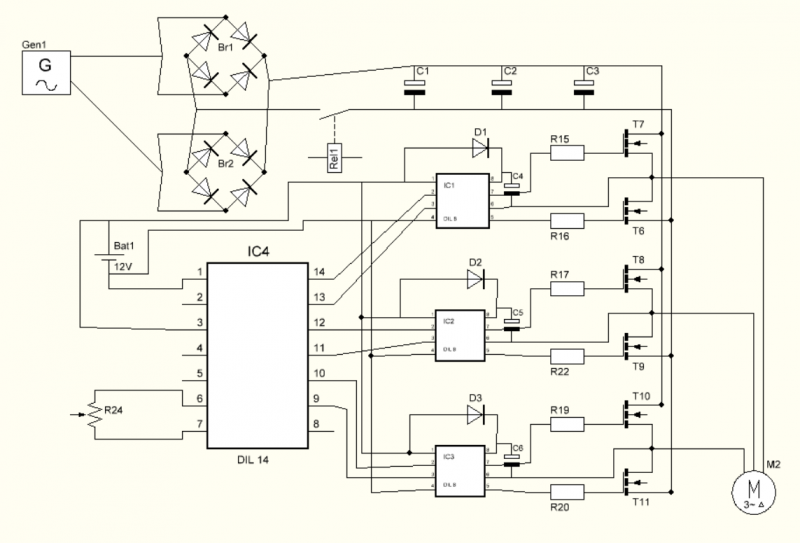 ТЕОРИЯ: StateFlow — StateFlow предоставляет графический язык, который включает в себя диаграмму перехода состояний, блок-схему, таблицу перехода состояний и таблицы истинности. он используется для описания того, как алгоритмы MATLAB и модель Simulink реагируют на…
ТЕОРИЯ: StateFlow — StateFlow предоставляет графический язык, который включает в себя диаграмму перехода состояний, блок-схему, таблицу перехода состояний и таблицы истинности. он используется для описания того, как алгоритмы MATLAB и модель Simulink реагируют на…
07 марта 2021 г. 19:32 IST
- MATLAB
Подробнее
СРАВНЕНИЕ СИСТЕМЫ ПРУЖИННОГО ДЕМПФЕРА С ИСПОЛЬЗОВАНИЕМ SIMULINK И SIMSCAPE
Цель:
ЦЕЛЬ: Открыть модель «Масса-Пружина-демпфер» в Simulink и Simscape: Выведите основное уравнение для модели. Измените значение массы, демпфера и пружины для модели Simscape и постройте результаты. Измените значение Mass x0 = 2 в модели Simulink и постройте результаты.…
26 февраля 2021 г. 20:15 IST
- MATLAB
Подробнее
Неделя -2
Цель:
ЦЕЛЬ: Создать модель дверного звонка Simulink с использованием блока соленоидов. Чтобы создать модель Simulink, используйте термистор для измерения температуры нагревателя и включения или выключения вентилятора. ИССЛЕДОВАНИЕ-I: Создайте модель дверного звонка Simulink, используя соленоидный блок. SOLENOID: Solenoid — это тип электромагнита, целью которого является…
Чтобы создать модель Simulink, используйте термистор для измерения температуры нагревателя и включения или выключения вентилятора. ИССЛЕДОВАНИЕ-I: Создайте модель дверного звонка Simulink, используя соленоидный блок. SOLENOID: Solenoid — это тип электромагнита, целью которого является…
18 Feb 2021 08:12 IST
Подробнее
Модель Simulink для операционной системы вентилятора с использованием термистора.
Цель:
Модель Simulink для операционной системы вентилятора с термистором. ТЕРМИСТОР: Термистор — это тип резистора, сопротивление которого зависит от температуры в большей степени, чем у стандартных резисторов. Это слово представляет собой комбинацию термального и резисторного. Термистор широко используется в качестве ограничителя пускового тока, датчик температуры (отрицательная температура…
18 фев. 2021 08:09 IST
2021 08:09 IST
Подробнее
Simulink Model for DoorBell with Solenoid Block
Задача:
ЦЕЛЬ: Создать модель дверного звонка Simulink с использованием блока соленоидов. СОЛЕНОИД: Соленоид — это тип электромагнита, целью которого является создание контролируемого магнитного поля с помощью катушки, свернутой в плотно упакованную спираль. Катушка может быть устроена для создания однородного магнитного поля в объеме пространства, когда ток…
17 фев. 2021 23:41 IST
Подробнее
Сравнение системы подвески с использованием блоков Simulink
Цель:
ЦЕЛЬ: построить функцию с помощью базового блока Simulink и запустить и изучить пример Simulink «Сравнение системы подвески» ПОДВЕСКА: Подвеска — это система шин (колес), шин воздуха, пружины, амортизатора и рычажного механизма, которые соединяют транспортное средство к его колесам и позволяют относительное движение между ними.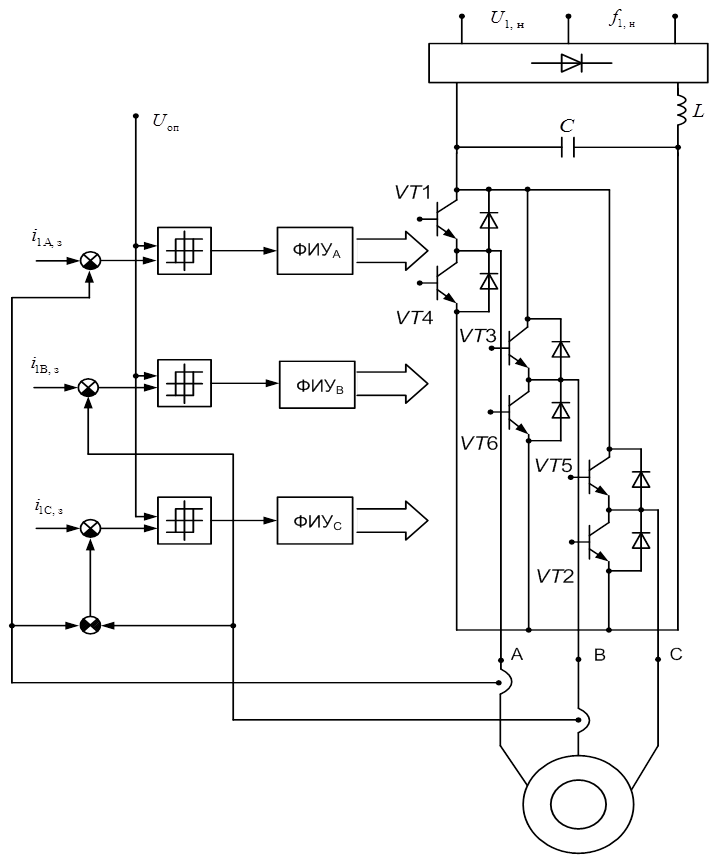 Подвеска…
Подвеска…
10 фев. 2021 14:02 IST
Подробнее
Генетический алгоритм в MATLAB для поиска ГЛОБАЛЬНЫХ максимумов с использованием функции сталагмита
Цель:
ЦЕЛЬ: Оптимизировать функцию сталагмита и найти глобальные максимумы функции, используя генетический алгоритм в MATLAB. ЗАДАЧИ: Целью этого отчета является оптимизация функции сталагмита путем кодирования программы с помощью генетического алгоритма в MATLAB и объяснения концепции генетического алгоритма, а также…
Подробнее
Проект 1 — Анализ термодинамических данных НАСА
Цель:
ЦЕЛЬ: Написать код в Matlab для анализа файла термодинамических данных НАСА и использования этих извлеченных данных для расчета конкретных данных, энтальпии, энтропии и молекулярной массы каждого вида. АНАЛИЗ ФАЙЛА: Анализ файла означает чтение какого-либо потока данных и построение в памяти модели семантического содержания…
АНАЛИЗ ФАЙЛА: Анализ файла означает чтение какого-либо потока данных и построение в памяти модели семантического содержания…
29 января 2021 г. 01:40 IST
Подробнее Рассчитать его тепловой КПД
Задача:
Цель : Продемонстрировать работу цикла Отто и написать код Matlab для построения графика фотоэлектрической диаграммы и расчета ее теплового КПД. Теория : Стандартный цикл воздуха (цикл Отто ): цикл Отто – это идеализированный термодинамический…
07 января 2021 01:34 IST
Подробнее
Неделя 3. Решение ОДУ второго порядка
Цель:
Цель: Создать в Matlab программу для решения ОДУ второго порядка движения простого маятника с демпфированием. ЗАДАЧА: Написать программу для имитации переходного поведения простого маятника. Создать анимацию движения простого маятника с помощью MATLAB ТЕОРИЯ: Простой маятник — простой…
07 января 2021 г. 01:05 IST
01:05 IST
- MATLAB
Подробнее
Напишите код MATLAB, чтобы соответствовать линейной и кубической полиномиальной кривой для данных удельной теплоемкости (Cp) и температуры.
Цель:
ЦЕЛЬ: Выполнить подбор кривой для данного набора DATA_set и найти наилучшее и идеальное соответствие для этого конкретного набора DATA_set с помощью MATLAB. ЗАДАЧА: Написать код, соответствующий линейному и кубическому полиному для конкретных данных тепла (`C_p`). Чтобы построить кривую линейной и кубической аппроксимации вместе с… 92 ac_d`…
05 января 2021 20:21 IST
- MATLAB
Читать больше
Показ 1 из 29 проектов
Попробуйте наши лучшие инженерные курсы, проекты и мастерские сегодня! Регулятор скорости двигателя | Engineering360
Двигатели
Регулирование скорости асинхронного двигателя: обзор
Асинхронные двигатели относятся к наиболее широко используемым электродвигателям, которые помогают инженерам преобразовывать электрическую энергию в механическую (в виде вращения вала). Эти двигатели переменного тока работают по принципу электромагнитной индукции; электрический ток в роторе получается из вращающегося магнитного поля в обмотке статора. Затем этот электрический ток используется для создания желаемого вращения вала (и крутящего момента).
Эти двигатели переменного тока работают по принципу электромагнитной индукции; электрический ток в роторе получается из вращающегося магнитного поля в обмотке статора. Затем этот электрический ток используется для создания желаемого вращения вала (и крутящего момента).
Асинхронные двигатели имеют ряд преимуществ, таких как простота конструкции и эксплуатации, долговечность, высокий КПД и пусковой крутящий момент. Тем не менее, одна проблема, которая остается неизменной для асинхронных двигателей, — это сложность достижения контроля скорости.
В этой статье мы вернемся к основам управления скоростью асинхронного двигателя. В нем будут представлены методы и расчеты для эффективного управления скоростью двигателя со стороны статора и ротора двигателя.
Одной из проблем, которая остается неизменной при применении асинхронных двигателей, является сложность достижения эффективного управления скоростью
Управление скоростью асинхронного двигателя со стороны статора
Метод №1 Изменение применяемой частоты можно оценить с помощью:
Где:
F = частота входящей сети
P = количество полюсов статора
Следовательно, инженер может контролировать скорость асинхронного двигателя, изменяя частоту входящей сети.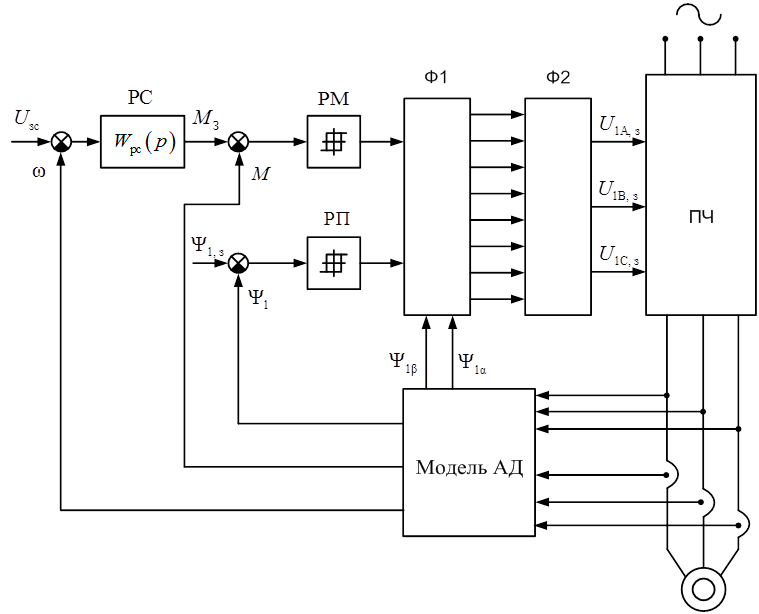 Итак, рассмотрим случай, когда частота входящей линии составляет 60 Гц при напряжении 120 В (типично для США). Синхронная скорость асинхронного двигателя с четырьмя полюсами (двигатель с двумя полюсами) будет 1800 об/мин. В действительности выходная скорость двигателя обычно меньше этой синхронной скорости. И это несоответствие называется проскальзыванием.
Итак, рассмотрим случай, когда частота входящей линии составляет 60 Гц при напряжении 120 В (типично для США). Синхронная скорость асинхронного двигателя с четырьмя полюсами (двигатель с двумя полюсами) будет 1800 об/мин. В действительности выходная скорость двигателя обычно меньше этой синхронной скорости. И это несоответствие называется проскальзыванием.
Тем не менее, инженеры могут снизить скорость двигателя, уменьшив частоту входной сети двигателя. Этот метод управления скоростью можно использовать в приложениях, где есть специальный генератор, питающий асинхронный двигатель. В таких сценариях частоту входящей линии можно изменить, просто изменив скорость генератора.
Метод №2 Управление асинхронными двигателями с постоянной VF
Электродвижущая сила (ЭДС), индуцируемая трехфазным асинхронным двигателем, определяется как
Где:
Ø = поток
K = постоянная обмотки
T = количество витков на фазу
f = частота входящей линии
Следовательно, поток можно получить, используя: частота входящей линии обратно пропорциональна потоку. Таким образом, когда частота входящей линии увеличивается, поток уменьшается (и наоборот). Увеличение потока (в результате уменьшения частоты входящей линии) вызывает насыщение потока в воздушном зазоре, что, в свою очередь, вызывает чрезмерный ток статора и искажает волну потока статора.
Таким образом, когда частота входящей линии увеличивается, поток уменьшается (и наоборот). Увеличение потока (в результате уменьшения частоты входящей линии) вызывает насыщение потока в воздушном зазоре, что, в свою очередь, вызывает чрезмерный ток статора и искажает волну потока статора.
Поэтому важно также контролировать ЭДС двигателя (или напряжение статора) при управлении частотой, чтобы поддерживать постоянный поток в воздушном зазоре. Это регулирование скорости должно быть таким, чтобы соотношение напряжение-частота (или V/f) оставалось постоянным. Инженеры достигают такого управления напряжением-частотой, используя преобразователь и набор инверторов (обычно используемые в частотно-регулируемых приводах).
Этот метод не только обеспечивает относительно постоянный крутящий момент, но также обеспечивает более высокую эффективность во время работы.
Способ №3 Изменение числа полюсов статора
Рассмотрим упомянутое ранее уравнение синхронной скорости. Можно видеть, что регулирование скорости асинхронного двигателя также может быть достигнуто путем изменения числа полюсов статора двигателя. Этот метод управления скоростью используется в асинхронных двигателях с короткозамкнутым ротором, которые имеют несколько независимых обмоток статора, намотанных на разное количество полюсов в одних и тех же пазах. Для управления скоростью двигателя инженерам нужно только выбрать, какую полюсную обмотку подключать.
Можно видеть, что регулирование скорости асинхронного двигателя также может быть достигнуто путем изменения числа полюсов статора двигателя. Этот метод управления скоростью используется в асинхронных двигателях с короткозамкнутым ротором, которые имеют несколько независимых обмоток статора, намотанных на разное количество полюсов в одних и тех же пазах. Для управления скоростью двигателя инженерам нужно только выбрать, какую полюсную обмотку подключать.
Например, типичный асинхронный двигатель с короткозамкнутым ротором может иметь обмотки статора для двух, четырех и шести полюсов. Таким образом, для частоты питания 60 Гц синхронные скорости при подключении каждого из полюсов представлены ниже:
(i) Для 2-полюсного соединения обмоток: Ns = (120*60)/2 = 3600 об/мин
( ii) Для 4-полюсного соединения обмотки: Ns = (120*60)/4 = 1800 об/мин
(iii) Для 6-полюсного соединения обмотки: Ns = (120*60)/6 = 1200 об/мин
Однако имейте в виду, что асинхронные двигатели с короткозамкнутым ротором обычно имеют скольжение до 3%.
Метод №4 Изменение приложенного напряжения
Чтобы понять, как работает управление скоростью асинхронного двигателя путем изменения приложенного напряжения, рассмотрим крутящий момент, создаваемый трехфазным асинхронным двигателем.
Уравнение крутящего момента для индукционных двигателей
Где:
E2 = ротор, индуцированный EMF
NS = синхронная скорость
x2 = Константивное реактивность
R2 = Ротоновое сопротивление
K = Константивность = Константивность). 3 (3 60578 R2 = Ротоновое сопротивление
K = Константивность = Константивность) = Константивность). /2pNs
Рассмотрим сценарий, в котором проскальзывание (s) настолько мало, что значением (sX2)2 можно пренебречь. Уравнение крутящего момента принимает вид:
Поскольку ЭДС ротора прямо пропорциональна напряжению питания, уравнение крутящего момента сводится к:
Напряжение). Теперь, если крутящий момент можно поддерживать постоянным, инженеры могут добиться различных проскальзываний (разницы в синхронной скорости и фактической скорости асинхронного двигателя), изменяя напряжение питания. Поэтому, если инженер хочет добиться большого скольжения (или значительно более низкой скорости двигателя), то ЭДС индукции (или напряжение питания) необходимо уменьшить соответствующим образом.
Поэтому, если инженер хочет добиться большого скольжения (или значительно более низкой скорости двигателя), то ЭДС индукции (или напряжение питания) необходимо уменьшить соответствующим образом.
Регулирование скорости асинхронного двигателя со стороны ротора
Способ №1 Каскадный режим
Этот метод управления скоростью предполагает подключение двух асинхронных двигателей к общему валу. Первый двигатель (называемый основным двигателем) питается от трехфазной сети, а второй двигатель (называемый также вспомогательным двигателем) работает за счет индуктивной ЭДС основного двигателя с помощью токосъемных колец. Инженеры могут добиться различных скоростей двигателя:
1. Заставить работать только главный асинхронный двигатель
2. Обеспечение работы только вспомогательного асинхронного двигателя
3. Обеспечение работы как вспомогательного, так и основного двигателя
Метод № 2 Реостатное управление ротором
Метод управления реостатом ротора очень похож на метод управления якорем в параллельных двигателях постоянного тока: метод регулирования скорости включает изменение сопротивления на стороне ротора двигателя с помощью реостата.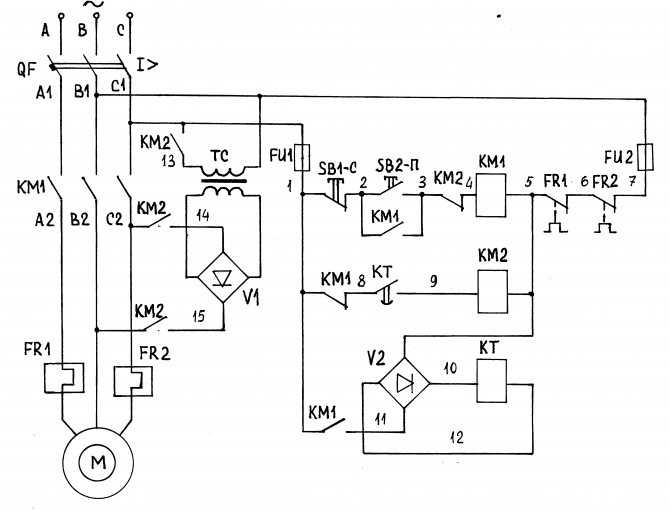 Когда реостат увеличивает сопротивление со стороны ротора, скорость уменьшается.
Когда реостат увеличивает сопротивление со стороны ротора, скорость уменьшается.
[Узнайте больше о регуляторах скорости асинхронных двигателей переменного тока с помощью Engineering360]
Регулирование скорости асинхронного двигателя: обратитесь к производителям
Хотя в этой статье представлена полезная информация о различных методах управления скоростью асинхронного двигателя, есть еще несколько моментов, которые инженер должен учитывать при выборе асинхронных двигателей для конкретного применения. Таким образом, инженерам рекомендуется обращаться к производителям асинхронных двигателей, чтобы обсудить их требования к применению.
Управление напряжением/частотой асинхронного двигателя с использованием ПЛИС
- Идентификатор корпуса: 212522059
@inproceedings{Thejaswini2014VoltageFrequencyCO,
title={Управление напряжением/частотой асинхронного двигателя с помощью ПЛИС},
автор = {Р. М. Теджасвини, Раджеш Синдхуджа и А.П. Йоганандини},
год = {2014}
} 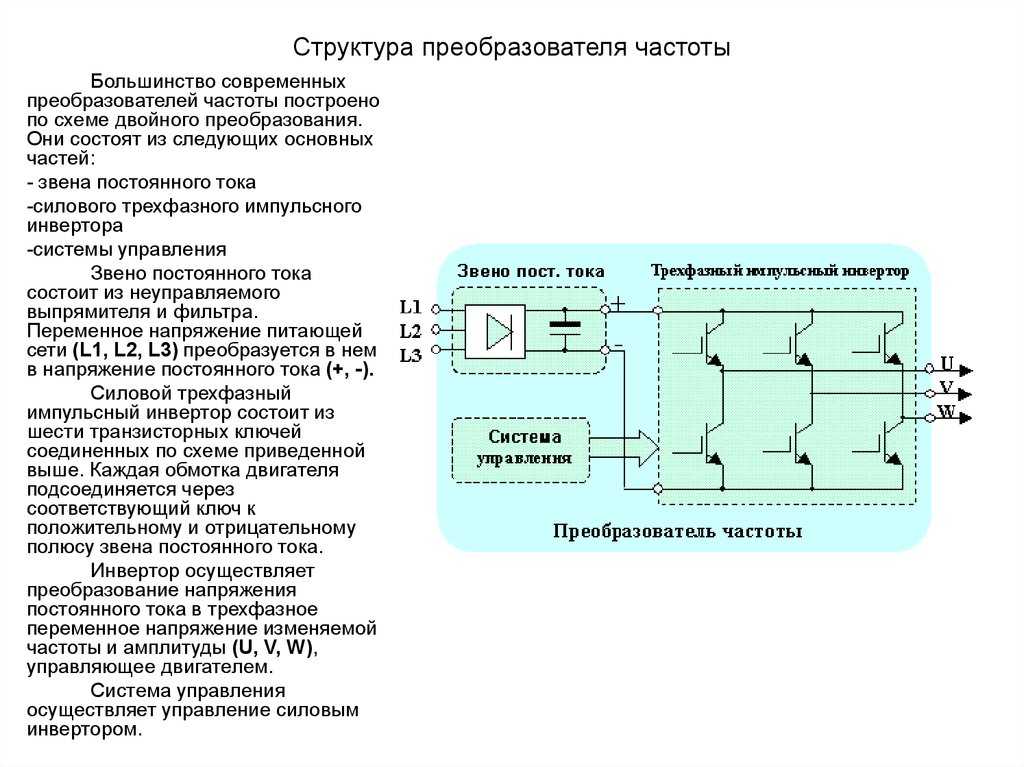 М. Теджасвини, Раджеш Синдхуджа и А.П. Йоганандини},
год = {2014}
}
М. Теджасвини, Раджеш Синдхуджа и А.П. Йоганандини},
год = {2014}
} - R. Thejaswini, R. Sindhuja, A.P. Yoganandini
- Опубликовано в 2014 г.
- Engineering
Трехфазные асинхронные двигатели являются наиболее распространенными двигателями, используемыми в промышленных системах управления движением, благодаря их недорогой, простой и прочной конструкции. . Беличья клетка — широко используемый тип асинхронных двигателей. В этой статье V/f-контроллер на наборе FPGA и проверка управления скоростью трехфазных асинхронных двигателей с короткозамкнутым ротором. Разработан частотно-регулируемый привод на базе ПЛИС. Программа управления скоростью была разработана в программном обеспечении Xilinx 13.1 с использованием языка VHDL. Эта реализация обеспечивает…
Регулирование скорости вращения асинхронного двигателя с помощью каскадного многоуровневого инвертора
- Л. Мохаммед
Инженерия
2-я Международная конференция по электротехнике, связи, компьютерам, энергетике и технике управления (ICECCPCE), 2019 г.
201943
В этой статье представлено управление частотой вращения асинхронного двигателя от напряжения к частоте. Каскадный многоуровневый инвертор MLI с неравными источниками постоянного тока, используемый для управления двигателем с минимальной общей гармоникой…
Сравнительное исследование управления V/F и IFOC для трехфазных асинхронных двигателей
- М. А. Авдаа, А. Обед, С. Дж. Якуб Е) метод управления» считается широко используемым в промышленности способом управления асинхронным двигателем (АД) благодаря его простоте и меньшей стоимости. Основные…
Backsteping управление асинхронным генератором с двойным питанием с помощью Xilinx System Generator для реализации на FPGA
В этой статье показано, как сгенерировать код VHDL для обратного управления асинхронным генератором с двойным питанием, необходимый для программирования FPGA без знания программирования VHDL. Это управление…
Надежное отслеживание скорости асинхронных двигателей: интеллектуальный подход к управлению, реализованный на Arduino
- Tan-Jan Ho, Chun-Hao Chang
Engineering
- 2018
- F. Nekoei, Y. Kavian, O. Strobel
Engineering
- 2011
- D.C. Shimpi
Инженерия, информатика
- 2011
- E. Koutroulis, A. Dollas, K. Kalaitzakis
Engineering
J. Syst. Архит.
- 2006
- Bahram Rashidi, M. Sabahi
Engineering, Computer Science
- 2013
- M. Cirstea, A. Dinu
Computer Science, Engineering
IEEE Transactions on Industrial Electronics
- 2007
- Объясните, как можно изменить скорость асинхронного двигателя с помощью изменения
частоты. - Обсудите различные методы управления частотой.
- Обсудите меры предосторожности, которые необходимо соблюдать при понижении частоты.
- Определите термины линейное изменение и вольт на герц.
4 отслеживания асинхронной машины (АД) мы предлагаем интеллектуальный регулятор скорости, реализованный на Arduino.
Поскольку напряжение/частота…с показателем 1-8 из 8 ссылок
FPGA на основе контроля скорости трехфазного индукционного двигателя
Прогнозируйте поля. Технология вентильной матрицы (FPGA) обеспечивает среду программируемой системы на кристалле (PSoC) для разработки современных цифровых контроллеров ASIC для конкретных приложений. В этом документе…
ШИМ-контроллер на основе ПЛИС для трехфазного инвертора
Представлены анализ и практическая реализация формы сигнала обычного трехфазного инвертора ШИМ, а также разработана система на основе ПЛИС с использованием метода широтно-импульсной модуляции для управления скоростью асинхронный двигатель.
Цифровое аппаратное моделирование силовой электроники и приводов в реальном времени
Цифровая аппаратная реализация симулятора в реальном времени полного привода асинхронной машины с использованием программируемой пользователем вентильной матрицы (FPGA) в качестве вычислительного механизма, а также точность и эффективность моделирования.
представлены.Реализация высокочастотной широтно-импульсной модуляции с использованием микросхем FPGA и CPLD
High Performance FPGA Based Digital Space Vector PWM Three Phase Voltage Source Inverter
A new method is proposed to realize простой, точный и высокопроизводительный метод DSVPWM на основе FPGA с низким потреблением ресурсов и меньшим временем выполнения, чем обычные методы.
A VHDL Holistic Modeling Approach and FPGA Implementation of a Digital Sensorless Induction Motor Control Scheme
This Подход обеспечивает такие преимущества, как уникальная среда моделирования и оценки для полных систем силовой электроники, та же среда используется для проектирования цифрового контроллера и быстрого прототипирования компактных ПЛИС, быстрая разработка проекта, короткое время выхода на рынок и возможность повторного использования модели/проекта.
Шимпи. «ШИМ-контроллер на основе ПЛИС для трехфазного инвертора
Eltamaly» Управление скоростью трехфазного асинхронного двигателя с помощью регулятора напряжения статора на основе ПЛИС
— — — —
Скорость трехфазного асинхронного двигателя может регулироваться либо
изменение количества полюсов статора на фазу, как в случае с последующим
полюсных двигателей, либо изменением частоты приложенного напряжения.Оба метода вызовут изменение синхронной скорости вращения
магнитное поле. Диаграмма, показанная на рис. 1, показывает, что когда
изменение частоты приводит к соответствующему изменению синхронной скорости.Рис. 1 Синхронная скорость определяется количеством полюсов статора
на фазу и частоту.Рис. 2 Генератор переменного тока управляет скоростью нескольких асинхронных двигателей.
Однако изменение частоты вызывает соответствующее изменение индуктивной
реактивное сопротивление обмоток (XL = 2pfL). Так как уменьшение частоты дает
уменьшение индуктивного сопротивления, количество напряжения, подаваемого на
двигатель должен быть уменьшен пропорционально уменьшению частоты, чтобы
для предотвращения перегрева обмоток из-за чрезмерного тока. Любой тип
частотного регулирования необходимо также регулировать выходное напряжение с помощью
изменение частоты. Существует два основных метода достижения переменной
частотный контроль: генератор и твердый
состояние .Блок управления генератором
Генераторы переменного тока часто используются для управления скоростью нескольких асинхронных двигателей.
которые требуют одинакового изменения скорости, например, двигатели на конвейерной линии
(ил. 2).Генератор приводится в действие двигателем постоянного тока или двигателем переменного тока, соединенным
к вихретоковой муфте. Выходная частота генератора определяется
по скорости ротора. Выходное напряжение генератора определяется
величиной постоянного тока возбуждения, подаваемого на ротор. Поскольку
выходное напряжение должно изменяться при изменении частоты, переменное напряжение
Источник постоянного тока используется для обеспечения тока возбуждения. Большинство элементов управления этим
использовать какой-либо метод определения скорости генератора и сделать автоматический
регулировка тока возбуждения.Электронное управление
Большинство преобразователей частоты работают, сначала изменяя напряжение переменного тока.
в постоянный ток, а затем обратно в переменный ток нужной частоты. Пара
частотно-регулируемых приводов показаны на рис. 3А и 3В.Существует несколько методов преобразования постоянного напряжения обратно в переменное.
Используемый метод обычно определяется производителем, возрастом
оборудование и размер двигателя, которым должен управлять привод. Переменная частота
приводы, предназначенные для управления скоростью двигателей до 500 лошадиных сил, как правило
использовать транзисторы. В схеме, показанной на рис. 4, трехфазный мост
выпрямитель преобразует переменный ток в постоянный. Мост
выпрямитель использует шесть SCR (кремниевые управляемые выпрямители). SCR позволяют
выходное напряжение управляемого выпрямителя. Как частота
уменьшается, тиристоры срабатывают позже в цикле и снижают выходное напряжение
к транзисторам. Дроссельная катушка и батарея конденсаторов используются для фильтрации
выходное напряжение до того, как транзисторы Q1-Q6 изменят напряжение постоянного тока
обратно в АС. Электронный блок управления подключен к базам транзисторов
с Q1 по Q6. Блок управления преобразует постоянное напряжение обратно в трехфазное.
переменный ток путем включения или выключения транзисторов в нужное время
и в нужной последовательности. Предположим, например, что транзисторы Q1 и
Q4 включаются одновременно. Это позволяет обмотке статора T1 быть
подключен к положительному напряжению, а Т2 к отрицательному напряжению.
Ток может протекать через Q4 в T2, через обмотку статора двигателя и
через T1 в Q1.Теперь предположим, что транзисторы Q1 и Q4 выключены, а транзисторы
Q3 и Q6 включены. Теперь ток будет течь через Q6 к обмотке статора.
T3, через двигатель к T2 и через Q3 к плюсу питания
поставлять.Поскольку транзисторы полностью открыты или полностью выключены,
Создаваемый сигнал представляет собой меандр, а не синусоиду (рис. 5).
Асинхронные двигатели будут работать на прямоугольной волне без особых усилий.
проблема. Некоторые производители разрабатывают блоки, которые будут генерировать ступенчатую форму волны.
как показано на рис. 6. Ступенчатая форма сигнала используется потому, что она более точно
приближается к синусоиде.Некоторые сопутствующие проблемы
В схеме, показанной на рис. 4, используются тиристоры в
блок питания и переходные транзисторы в выходном каскаде. Источники питания SCR
контролировать выходное напряжение, прерывая входящий сигнал.Это может вызвать гармоники в линии, вызывающие перегрев трансформаторов и двигателей, а также перегорание предохранителей и срабатывание автоматических выключателей. Когда
В качестве переключателей используются биполярные транзисторы.
приводится в насыщение, подавая на них чрезмерное количество база-эмиттер
Текущий. Насыщение транзистора приводит к тому, что напряжение коллектор-эмиттер
падать до 0,04-0,03 вольта. Это небольшое падение напряжения позволяет
транзистор для управления большим количеством тока без разрушения.
Однако, когда переходной транзистор находится в состоянии насыщения, он не может
восстанавливаться или выключаться так быстро, как обычно. Это сильно ограничивает частоту
отклик транзистора.Рис. 3A Внутри преобразователя частоты переменного тока.
Ил. 3B 2 л.с. преобразователь частоты
БТИЗ
Многие частотно-регулируемые приводы с транзисторным управлением теперь используют
Тип транзистора называется биполярным транзистором с изолированным затвором (IGBT).
IGBT имеют изолированный затвор, очень похожий на некоторые типы полевого эффекта.
транзисторы (FET). Поскольку затвор изолирован, он имеет очень высокий импеданс.
IGBT — это устройство, управляемое напряжением, а не током.
Это дает ему возможность очень быстро выключаться. IGBT могут управляться
в насыщение, чтобы обеспечить очень низкое падение напряжения между эмиттером и коллектором, но они не страдают от медленного времени восстановления обычных
переходные транзисторы. Схематическое обозначение IGBT показано на рис.
7.Рис. 4 Твердотельный регулятор частоты с использованием переходных транзисторов.
Рис. 5 Прямоугольная волна.
Рис. 6 Ступенчатая волна.
Рис. 7 Схематическое обозначение биполярного транзистора с изолированным затвором.
Приводы с БТИЗ обычно используют диоды, а не тиристоры, для выпрямления переменного тока.
напряжения в постоянное ( рис. 8). Трехфазный выпрямитель обеспечивает постоянную
Постоянное напряжение на транзисторах. Выходное напряжение двигателя регулируется
широтно-импульсной модуляцией (ШИМ). ШИМ осуществляется поворотом транзистора
включаться и выключаться несколько раз в течение каждого полупериода ( рис. 9). Выход
напряжение представляет собой среднее значение пикового или максимального напряжения и количества
время включения или выключения транзистора.Предположим, что трехфазный переменный ток напряжением 480 вольт выпрямляется до постоянного тока и фильтруется.
Напряжение постоянного тока, подаваемое на IGBT, составляет приблизительно 630 вольт. Выход
напряжение на двигателе регулируется скоростью переключения транзисторов.Предположим, что транзистор открыт на 10 микросекунд и выключен на 20 микросекунд.
В этом примере транзистор открыт треть времени и выключен.
на две трети времени. Напряжение, подаваемое на двигатель, будет равно 210 В.
вольт (630/3). Скорость, с которой могут работать IGBT, позволяет ширину импульса
модуляция для создания ступенчатой волны, очень похожей на стандартную
синусоида (рис. 10).Рис. 8 В преобразователях частоты, использующих БТИЗ, обычно используются диоды.
в выпрямителе вместо SCR.Рис. 9 Широтно-импульсная модуляция осуществляется поворотом напряжения
включаться и выключаться несколько раз в течение каждого полупериода.Рис. 10 Скорость IGBT может создавать ступенчатую волну, подобную
к синусоиде.Преимущества и недостатки IGBT-приводов
Большим преимуществом приводов, использующих БТИЗ, является тот факт, что тиристоры, как правило,
не используется в блоке питания и это значительно снижает проблемы с линией
гармоники.Самым большим недостатком является высокая скорость переключения транзисторов.
может привести к скачкам напряжения в диапазоне 1600 вольт.
мотор. Эти скачки напряжения могут вывести из строя некоторые двигатели. Длина линии от
привод к двигателю представляет большую проблему для приводов, использующих IGBT. Короткая линия
длина предпочтительнее.Двигатели с инверторным номиналом
Из-за проблемы чрезмерных скачков напряжения, вызванных приводами IGBT,
некоторые производители выпускают мотор на 9Инвертор 1328 с номиналом . Эти
двигатели специально разработаны для работы с частотно-регулируемыми приводами.Они отличаются от стандартных двигателей по нескольким параметрам:
1.
Многие двигатели с инверторным номиналом имеют отдельный вентилятор для непрерывной работы.
охлаждение для двигателя меньше скорости. Во многих двигателях используется вентилятор, подключенный
к валу двигателя, чтобы помочь всасывать воздух через двигатель. Когда скорость двигателя
уменьшается, вентилятор не может поддерживать достаточный поток воздуха для охлаждения двигателя.2. Двигатели с инверторным номиналом обычно имеют изоляционную бумагу между
обмотки и сердечник статора (рис. 11). Всплески высокого напряжения
производят большие токи, создающие сильное магнитное поле. Это увеличило
магнитное поле заставляет обмотки двигателя двигаться, потому что, подобно магнитному
поля отталкивают друг друга. Это движение может в конечном итоге привести к нарушению изоляции.
чтобы стереть провод и произвести заземленную обмотку двигателя.3. Двигатели с инвертором обычно добавляют фазовую бумагу
терминал ведет. Фазовая бумага — это изоляционная бумага, добавленная к терминалу.
провода, выходящие из двигателя. Всплески высокого напряжения влияют на начало
провод катушки намного больше, чем провод внутри катушки. Катушка представляет собой
индуктор, который естественным образом препятствует изменению тока. Большая часть изоляции
напряжение, вызванное скачками высокого напряжения, возникает в начале обмотки.4. Магнитопровод, используемый в конструкции обмоток двигателя, имеет
более высокая номинальная изоляция, чем у других двигателей.5. Размер корпуса больше, чем у большинства трехфазных двигателей. Размер корпуса
больше из-за добавленной изоляционной бумаги между обмотками и сердечником статора. Кроме того, больший размер корпуса помогает охлаждать двигатель, обеспечивая
большая площадь поверхности для отвода тепла.Рис. 11 Изолирующая бумага между обмотками и статором
Рамка.Преобразователи частоты, использующие SCR и GTO
Рис.
12 Преобразование постоянного тока в переменный ток с помощью тиристоров.Преобразователи частоты, предназначенные для управления двигателями мощностью более 500 л.с.
обычно используют SCR или GTO (устройство выключения ворот). GTO похожи на
SCR, за исключением того, что проводимость через GTO можно остановить, применив
отрицательное напряжение — отрицательное по отношению к катоду — к затвору. SCR
а GTO являются тиристорами и могут выдерживать большее количество
тока, чем транзисторы. Тиристоры представляют собой твердотельные устройства, обладающие
только два состояния работы: полностью включен или полностью включен
выключенный. Пример однофазной цепи, используемой для преобразования постоянного напряжения в
Напряжение переменного тока с тиристорами показано на рис. 12. В этой схеме тиристоры
подключены к блоку фазового сдвига, который управляет последовательностью и скоростью
при котором SCR включаются. Схема построена таким образом, что тиристоры
A и A’ включаются одновременно, а SCR B и B’ включаются одновременно.
в то же время. Катушки индуктивности L1 и L2 используются для фильтрации и формирования волны.
Диоды с D1 по D4 являются фиксирующими диодами и используются для предотвращения выходного
напряжение не становится чрезмерным. Конденсатор С1 используется для включения одного набора
SCR выключаются, когда другой набор включен. Этот конденсатор должен быть настоящим
Конденсатор переменного тока, потому что он будет заряжаться с чередованием полярности каждый раз.
полуцикл. В преобразователе, предназначенном для работы с большим количеством энергии, конденсатор
C1 будет банком конденсаторов. Чтобы понять работу схемы,
предположим, что тиристоры A и A’ включены одновременно. Ток будет течь
через цепь, как показано на рис. 13. Обратите внимание на направление тока
течь через нагрузку, и что конденсатор C1 был заряжен до полярности
показано.Когда SCR включен, его можно выключить, только разрешив текущий
поток через участок анод-катод падает ниже определенного уровня, называемого
удерживающий текущий уровень. Пока ток продолжает течь через
анод-катод, SCR не выключится.Теперь предположим, что тиристоры B и B’ включены. Поскольку тиристоры A и A’
все еще включен, теперь в цепи существуют два пути тока. Положительный
Однако заряд на конденсаторе C1 заставляет отрицательные электроны видеть
более легкий путь. Ток устремится зарядить конденсатор до противоположного
полярность, останавливая ток, протекающий через тиристоры A и A’, позволяя
их отключить. Теперь ток протекает через тиристоры B и B’ и заряжает
конденсатор на противоположную полярность (рис. 14). Обратите внимание, что
ток теперь течет через нагрузку в противоположном направлении, что создает
переменный ток на нагрузке.Для получения следующего полупериода переменного тока тиристоры A и A’ закрыты.
снова. Теперь положительно заряженная сторона конденсатора вызовет
ток, чтобы перестать течь через тиристоры B и B’, позволяя им повернуться
выключенный. Ток снова течет через нагрузку в указанном направлении
на рис. 13. Частота контура определяется скоростью
при котором SCR включаются. Преобразователь частоты, рассчитанный на 125
мощность указана на рис. 15.Рис. 13 Ток протекает через тиристоры A и A’.
Рис. 14 Ток протекает через тиристоры B и B’
Ил. 15 А 125 л.с. Регулятор двигателя переменного тока с переменной частотой.
Особенности частотного регулирования
Рис. 16 Большинство преобразователей частоты обеспечивают ограничение тока и регулировку скорости.
Хотя основная цель частотно-регулируемого привода — обеспечить
управления скоростью двигателя переменного тока, большинство приводов обеспечивают функции, которые другие
типы элементов управления этого не делают. Многие частотно-регулируемые приводы могут обеспечить
характеристики крутящего момента на низких скоростях, которые так желательны для двигателей постоянного тока. это
эта функция позволяет двигателям переменного тока с короткозамкнутым ротором заменить двигатели постоянного тока.
для многих приложений.Многие частотно-регулируемые приводы также обеспечивают ограничение тока и автоматическую
регулировка скорости двигателя.Ограничение тока обычно достигается путем подключения трансформаторов тока.
на вход привода и определение увеличения тока при нагрузке
добавлен. Регулирование скорости осуществляется путем измерения скорости двигателя и передачи этой информации обратно в привод (рис. 16).Еще одной особенностью частотно-регулируемых приводов является ускорение и замедление.
контроль, иногда называемый линейным изменением. Разгон используется для ускорения или замедления
двигатель в течение некоторого времени. Разгон позволяет двигателю привести
медленно нагружайте скорость, а не просто подключайте двигатель напрямую
к линии.Даже если регулятор скорости установлен в максимальное положение при пуске
кнопка нажата, линейное изменение заставляет двигатель ускорять нагрузку от
от нуля до максимальных оборотов в течение нескольких секунд. Эта функция может быть реальной
преимущество для некоторых типов нагрузок, особенно нагрузок с зубчатой передачей. В некоторых
контроллеры, количество времени ускорения и замедления можно регулировать
настройкой потенциометров на главной плате управления ( рис. 17). Другой
Контроллеры полностью управляются цифровым способом, а время разгона и торможения программируется в памяти компьютера.Некоторые другие настройки, которые обычно можно установить, заменив потенциометры.
или запрограммировать устройство следующим образом:Предел тока : Этот элемент управления устанавливает максимальное количество
ток, который привод может подавать на двигатель.Вольт на Герц: Задает коэффициент увеличения напряжения при
частота увеличивается или уменьшается по мере уменьшения частоты.Максимум герц : Этот элемент управления устанавливает максимальную скорость
мотор. Большинство двигателей предназначены для работы в диапазоне частот от 0 до 60 Гц.
но некоторые приводы позволяют устанавливать выходную частоту выше 60 Гц, что
позволит двигателю работать на более высокой скорости, чем нормальная. Максимум
Управление герцами также может быть установлено для ограничения выходной частоты значением
менее 60 Гц, что ограничило бы скорость двигателя значением менее
обычный.Минимум герц : Задает минимальную скорость двигателя.
разрешено бегать.Некоторые преобразователи частоты позволяют регулировать ограничение тока, максимальную и минимальную скорость, время линейного изменения и т. д. путем настройки подстроечных резисторов.
расположен на главной плате управления. В других приводах используется микропроцессор.
в качестве контроллера. Значения ограничения тока, скорости, времени разгона и т. д. для этих приводов запрограммированы в устройстве и намного проще.
сделать и, как правило, более точны, чем регулировка подстроечных резисторов.
Программируемый частотно-регулируемый привод показан на рис. 18.Рис. 17 Некоторые частотно-регулируемые приводы позволяют выполнять настройку
внося коррективы на главной плате управления.ТЕСТ:
1. Какова синхронная скорость шестиполюсного двигателя, работающего от
приложенное напряжение 20 герц?2. Почему необходимо снижать напряжение на двигателе, когда частота
уменьшен?3. Если генератор переменного тока используется для обеспечения переменной частоты, как
выходное напряжение генератора регулируется?4. Какое твердотельное устройство обычно используется для получения переменной частоты
в приводах, предназначенных для управления двигателями мощностью до 500 л.с.?5. Почему тиристоры используются для построения мостового выпрямителя во многих твердотельных
частотно-регулируемые приводы?6. В чем заключается основной недостаток использования тиристоров в переменной частоте?
водить машину?7.
- М. А. Авдаа, А. Обед, С. Дж. Якуб Е) метод управления» считается широко используемым в промышленности способом управления асинхронным двигателем (АД) благодаря его простоте и меньшей стоимости. Основные…
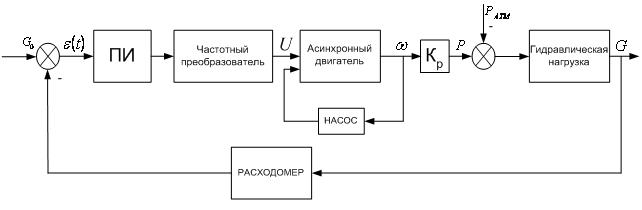
 Поскольку напряжение/частота…
Поскольку напряжение/частота…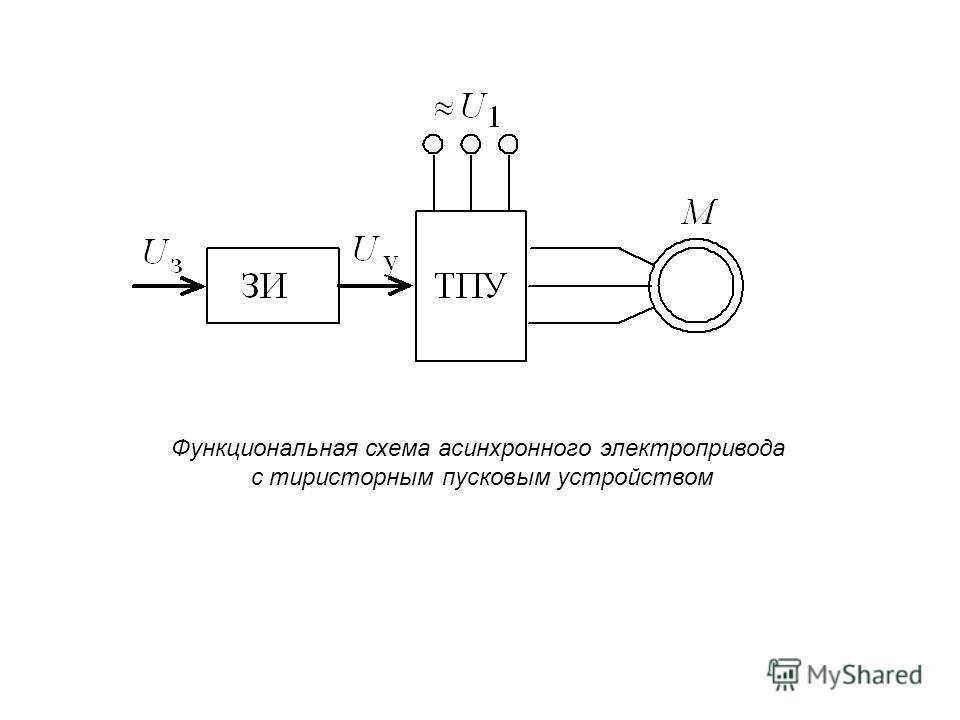 представлены.
представлены.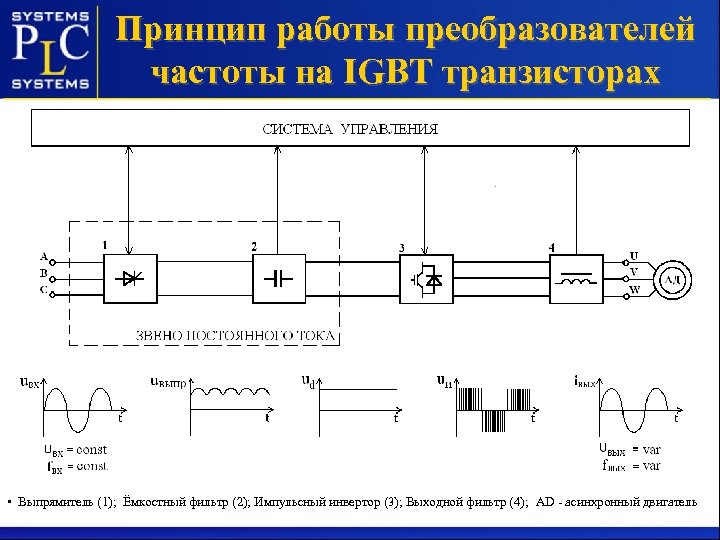


 Пара
Пара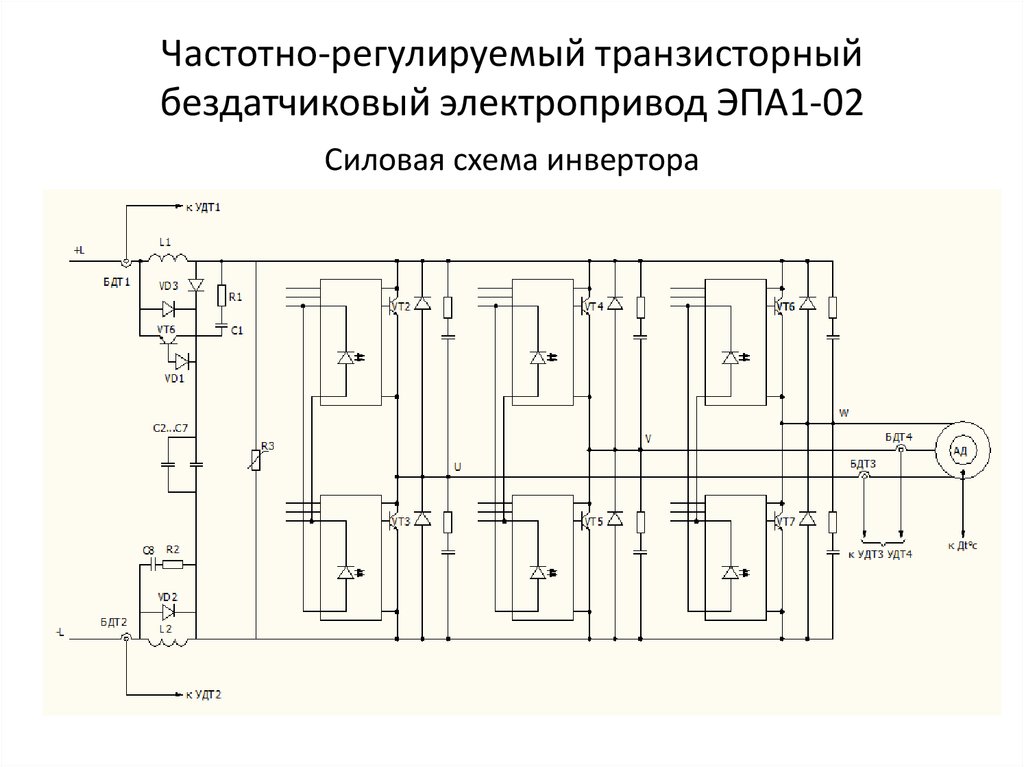 Электронный блок управления подключен к базам транзисторов
Электронный блок управления подключен к базам транзисторов