Содержание
Бесколлекторный двигатель постоянного тока: принцип работы, варианты конструкций
Меню
изменить
+7 (812) 317-77-93
En
Ru
Каталог
Отмена
Товары
- GPL016-2/12:1 — Редуктор планетарный Gysin GPL016-2/12:1
- GPL016-1/3:1 — Редуктор планетарный Gysin GPL016-1/3:1
- GPL016-1/4:1 — Редуктор планетарный Gysin GPL016-1/4:1
- GPL016-1/7:1 — Редуктор планетарный Gysin GPL016-1/7:1
- GPL016-2/9:1 — Редуктор планетарный Gysin GPL016-2/9:1
Категории
- Моторы / Бесколлекторные двигатели maxon EC
- Моторы / Коллекторные двигатели maxon DC
- Редукторы / Редуктор с винтовой передачей
- Моторы / Бесколлекторные двигатели EC
- Редукторы / Планетарный редуктор
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.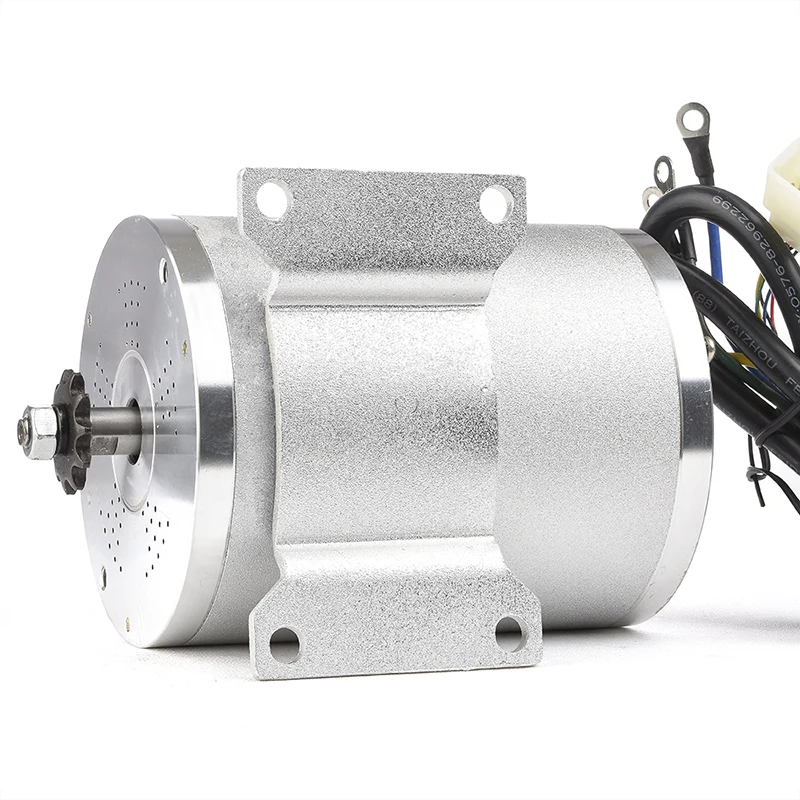
Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла. Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей.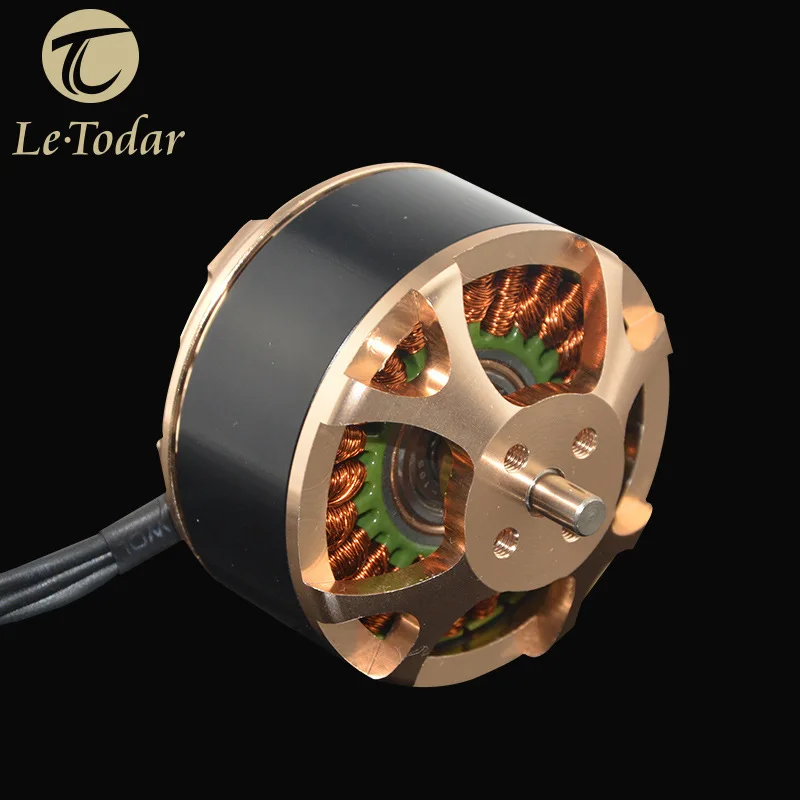 Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя. Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Поделиться:
- Санкт-Петербург, Пионерская улица, 30 «B», офис 306
- +7 (812) 317-77-93
- [email protected]
- Innodrive © 2022
- Решения
- Новости
- О компании
- Доставка и оплата
- Партнеры
- Видеоматериалы
- Статьи
- Контакты
- Карта сайта
Innodrive © 2022
Нельзя добавить товар к сравнению.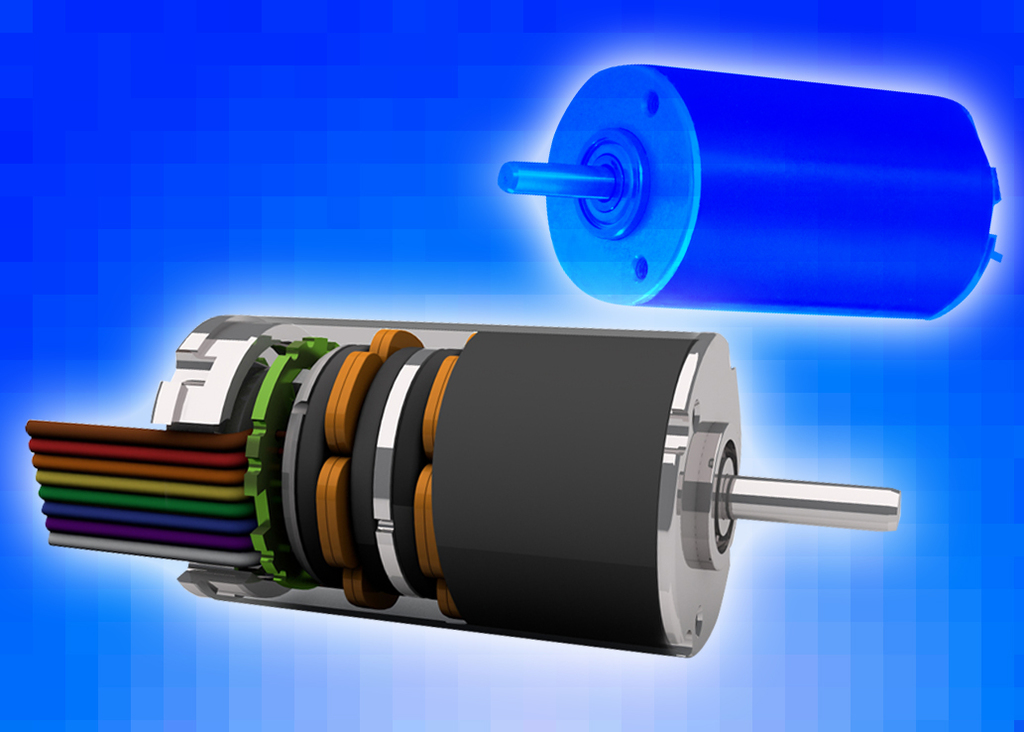 Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Товар успено добавлен в корзину
Ваш город
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Казань
- Нижний Новгород
- Челябинск
- Самара
- Омск
- Ростов-на-Дону
- Уфа
- Красноярск
- Воронеж
- Пермь
- Волгоград
- Краснодар
- Саратов
- Тюмень
- Тольятти
- Ижевск
- Барнаул
- Ульяновск
- Иркутск
- Хабаровск
- Ярославль
- Владивосток
- Махачкала
- Томск
- Оренбург
- Кемерово
Извини, ничего не нашлось
Ваш заказВаша корзина пуста
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Перезвонить мне
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Сайт использует cookies для вашего удобства. Политика конфидинциальности и Правила использования. Принять
Принять
Политика конфиденциальности
Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?
Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера).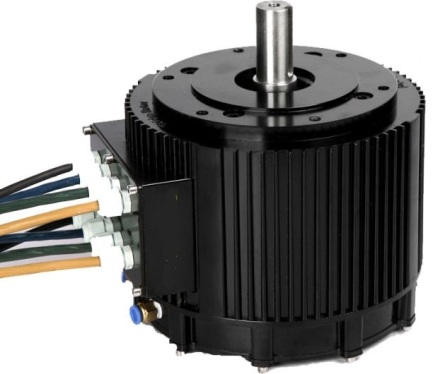 Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью.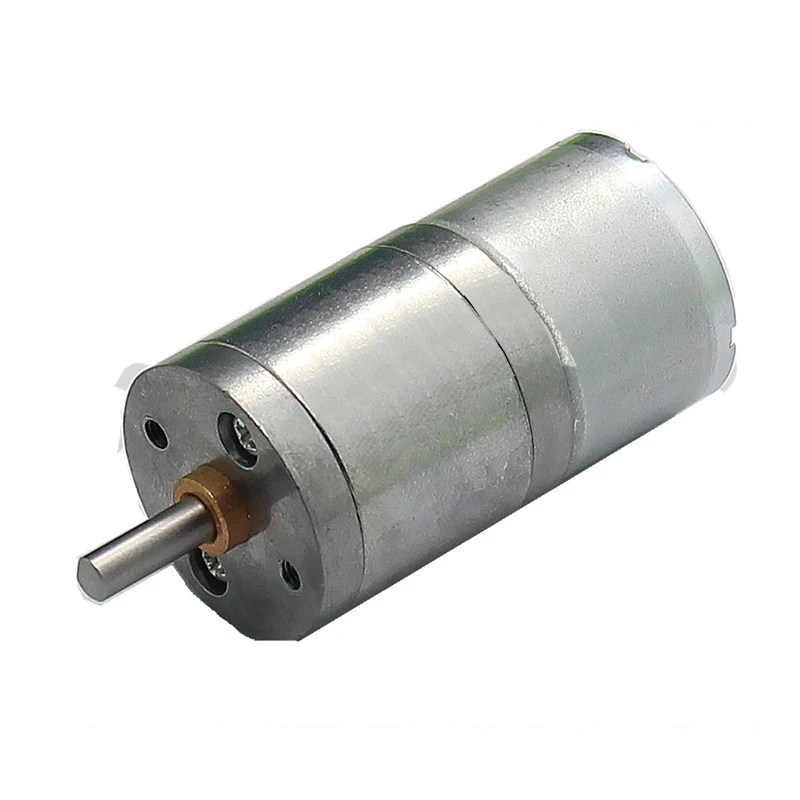 Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя. — Avislab
Общее устройство (Inrunner, Outrunner)
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.
Магниты и полюса
Количество полюсов на роторе четное. Форма применяемых магнитов обычно прямоугольная. Цилиндрические магниты применяются реже. Устанавливаются они с чередованием полюсов.
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса.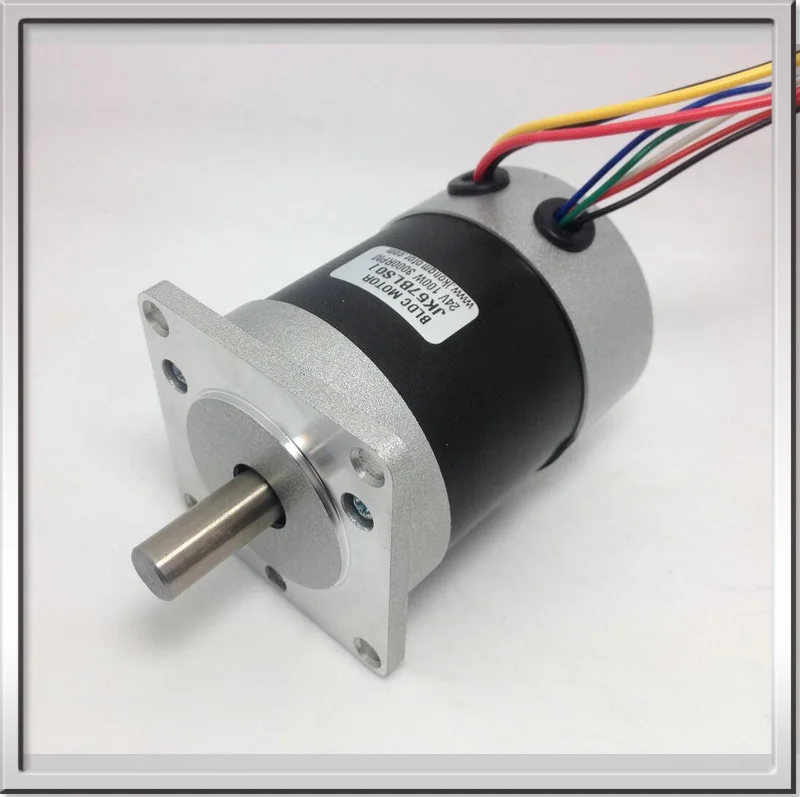 Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Обмотка трехфазного бесколлекторного двигателя выполняется медным проводом. Провод может быть одножильным или состоять из нескольких изолированных жил. Статор выполняется из нескольких сложенных вместе листов магнитопроводящей стали.
Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
6 групп по 2 зуба
4 группы по 3 зуба
3 группы по 4 зуба
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.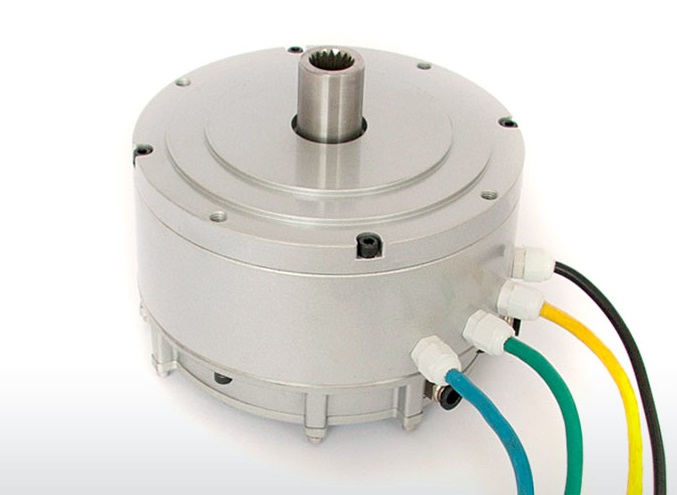
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный оборот. При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре. Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот. Например, имеем 42 магнита на роторе. Для того чтобы провернуть ротор на один оборот, потребуется 42/2=21 электрический оборот. Это свойство можно использовать как своеобразный редуктор. Подобрав необходимое количество полюсов, можно получить двигатель с желаемыми скоростными характеристиками. Кроме того, понимание этого процесса будет нам необходимо в будущем, при выборе параметров регулятора.
Датчики положения
Устройство двигателей без датчиков отличается от двигателей с датчиками только отсутствием последних. Других принципиальных отличий нет. Наиболее распространены датчики положения, работающие на основе эффекта Холла. Датчики реагируют на магнитное поле, их располагают, как правило, на статоре таким образом, чтобы на них воздействовали магниты ротора. Угол между датчиками должен быть 120 градусов.
Других принципиальных отличий нет. Наиболее распространены датчики положения, работающие на основе эффекта Холла. Датчики реагируют на магнитное поле, их располагают, как правило, на статоре таким образом, чтобы на них воздействовали магниты ротора. Угол между датчиками должен быть 120 градусов.
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Каждый двигатель рассчитывается под определенные требования и имеет следующие основные характеристики:
- Режим работы на который рассчитан двигатель: длительный или кратковременный. Длительный режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный — подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены.
- Сопротивление обмотки двигателя. Сопротивление обмотки двигателя влияет на КПД двигателя.
 Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения. - Максимальное рабочее напряжение. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром.
- Максимальные обороты. Иногда указывают не максимальные обороты, а Kv — количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу.
- Максимальный ток. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше.
- Максимальная мощность двигателя. Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно — несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя.
- Номинальная мощность. Мощность, которую двигатель может развивать на протяжении всего времени включения.
- Угол опережения фазы (timing). Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
 Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
Так же следует обратить внимание на то, что при номинальной нагрузке Вы не получите максимальных оборотов на валу двигателя. Kv указывается для не загруженного двигателя. При питании двигателя от батарей следует учесть «проседание» питающего напряжения под нагрузкой, что в свою очередь также снизит максимальные обороты двигателя.
Kv указывается для не загруженного двигателя. При питании двигателя от батарей следует учесть «проседание» питающего напряжения под нагрузкой, что в свою очередь также снизит максимальные обороты двигателя.
Звезда и Треугольник
Обмотки бесколлекторного двигателя соединяют по схеме звезда или треугольник (дельта).
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Литература
Design and Prototyping Methods for Brushless Motors and Motor Control
by Shane W. Colton
Вентильные электрические двигатели и приводы на их основе
Овчинников И.Е.
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
 Управление бесколлекторным мотором (BLDC)
Управление бесколлекторным мотором (BLDC)Бесколлекторные двигатели постоянного тока. Что это такое? — Avislab
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор — магниты, статор — обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы «ну это как синхронник», или еще хуже «он похож на шаговик». Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор «кормит» двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Иногда приходится слышать фразы «ну это как синхронник», или еще хуже «он похож на шаговик». Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор «кормит» двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ — это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Функции коллектора выполняет электроника.
Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел — коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники — просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
Для того чтобы понять, что происходит в электронике регулятора, управляющего бесколлекторным двигателем, вернемся немного назад и сначала разберемся как работает коллекторный двигатель. Из школьного курса физики помним, как магнитное поле действует на рамку с током. Рамка с током вращается в магнитном поле. При этом она не вращается постоянно, а поворачивается до определенного положения. Для того чтобы происходило непрерывное вращение, нужно переключать направление тока в рамке в зависимости от положения рамки.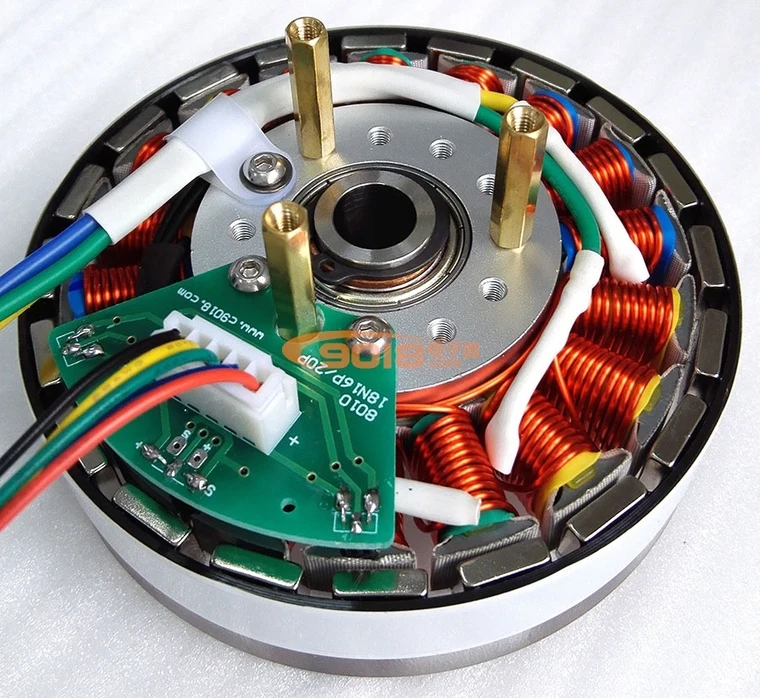 В нашем случае рамка с током — это обмотка двигателя, а переключением занимается коллектор — устройство со щетками и контактами. Устройство простейшего двигателя смотри на рисунке.
В нашем случае рамка с током — это обмотка двигателя, а переключением занимается коллектор — устройство со щетками и контактами. Устройство простейшего двигателя смотри на рисунке.
То же самое делает и электроника, управляющая бесколлекторным двигателем — в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя. Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени.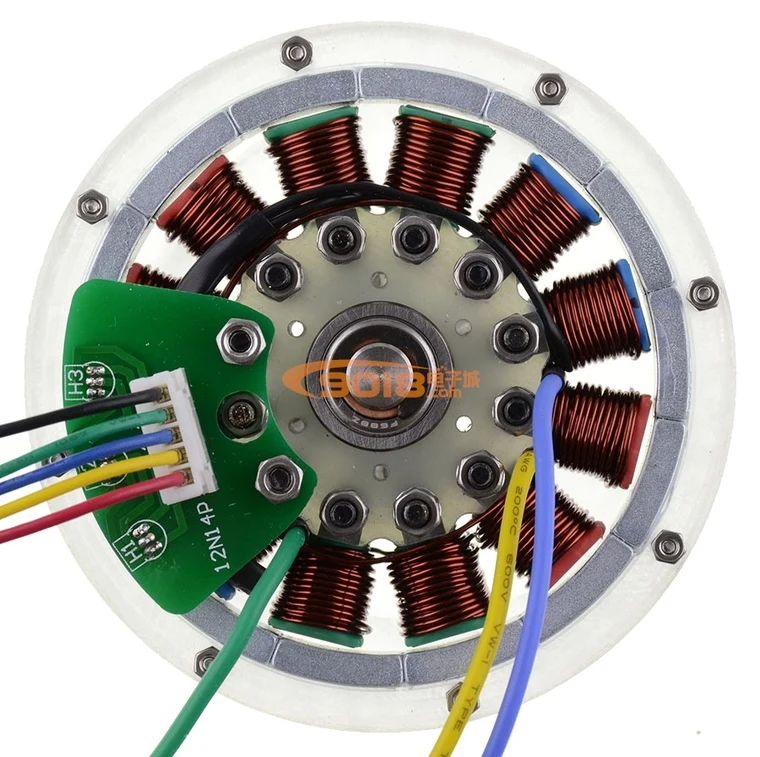 Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких — без датчиков? В чем их отличие?
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) — применяют двигатели с датчиками.
Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы — это обмотки двигателя. Поэтому если сказать «трехобмоточный», думаю, это тоже будет правильно. Три обмотки соединяются по схеме «звезда» или «треугольник». Трехфазный бесколлекторный двигатель имеет три провода — выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться «шагами» на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы «на пальцах»
Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
 Структура ESC
Структура ESCТрехфазный двигатель постоянного тока. Бесколлекторные двигатели постоянного тока
Бесколлекторные двигатели на сегодняшний день являются довольно распространенными. Применяются данные устройства чаще всего с электроприводами. Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
Дополнительно бесколлекторные модификации устанавливаются в обычные вентиляторы для кондиционирования воздуха. В наше время на рынке представлено множество моделей с датчиками и без них. При этом по типу регуляторов модификации довольно сильно отличаются. Однако чтобы разобраться в данном вопросе более подробно, необходимо изучить устройство простого двигателя.
Устройство бесколлекторной модели
Если рассматривать обычный трехфазный бесколлекторный двигатель, то катушка индуктивности у него устанавливается медного типа. Статоры используются как широтные, так и импульсные. Зубцы у них применяются разного размера. Как говорилось ранее, существуют модели с датчиками, а также без них.
Для фиксации статора используются колодки. Непосредственно процесс индукции происходит за счет обмотки статора. Роторы чаше всего применяются двухполюсного типа. Сердечники у них устанавливаются стальные. Для закрепления магнитов на моделях имеются специальные пазы. Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.
Двухразрядные модели
Безколлекторные эл. двигатели данного типа часто используются в морозильном оборудовании. При этом компрессоры для них подходят самые разнообразные. В среднем мощность модели способна достигать 3 кВт. Схема бесколлекторного двигателя катушки чаще всего включает двойного типа с медной обмоткой. Статоры устанавливаются только импульсные. В зависимости от производителя длина зубцов может меняться. Датчики используются как электрического, так и индуктивного типа. Для систем нагрева указанные модификации походят плохо.
Также следует учитывать, что сердечники в бесколлекторных двигателях встречаются в основном стальные. При этом пазы для магнитов используются довольно широкие, а расположены они очень близко друг к другу. За счет этого частотность у устройств может быть высокой. Регуляторы для таких модификаций подбираются чаще всего одноканального типа.
Трехразрядные модификации
Трехразрядный бесколлекторный двигатель отлично подходит для систем вентилирования. Датчики у него используются, как правило, электрического типа. При этом катушки устанавливаются довольно широкие. За счет этого процесс индукции осуществляется быстро. В данном случае частотность устройства зависит от статора. Обмотка у него чаще всего встречается медного типа.
Предельное напряжение трехразрядные бесколлекторные двигатели способны выдерживать на уровне 20 В. Тиристорные модификации в наше время встречаются довольно редко. Также следует отметить, что магниты в таких конфигурациях могут устанавливаться как на внешней, так и на внутренней стороне роторной пластины.
Четырехразрядные модификации своими руками
Сделать четырехразрядный бесколлекторный двигатель своими руками можно абсолютно просто. Для этого необходимо в первую очередь заготовить пластину с пазами. Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3. 3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Колодки для устройства чаще всего подбираются стальные. В данном случае многое зависит от размеров роторной пластины. Непосредственно статор надо использовать с двойной обмоткой. При этом сердечник важно заготавливать стального типа. Если рассматривать модификации без регуляторов, то закончить сборку бесколлекторного двигателя можно установкой изолирующего затвора. При этом контакты устройства необходимо вывести на внешнюю сторону пластины. Для обычного вентилятора такие бесколлекторные модели подойдут идеально.
Устройства с регулятором АВР2
Бесколлекторный двигатель с регуляторами данного типа на сегодняшний день является весьма востребованным. Подходят указанные системы больше всего для приборов кондиционирования. Также они в промышленной сфере широко используются для холодильного оборудования. Они способны работать с электроприводами различной частотности. Катушки у них чаще всего устанавливаются двойного типа. При этом статоры можно встретить только импульсные. В свою очередь, широтные модификации являются не сильно распространенными.
Датчики в бесколлекторных двигателях с регуляторами данной серии используются только индуктивные. При этом частотность устройства можно отслеживать по системе индикации. Колодки, как правило, устанавливаются контактного типа, и крепиться они могут непосредственно на статорной пластине. Регулятор бесколлекторного двигателя в данном случае позволяет менять частотность довольно плавно. Происходит данный процесс за счет изменения параметра выходного напряжения. В целом эти модификации являются очень компактными.
Двигатели с регуляторами АВР5
Бесколлекторный двигатель с регулятором данной серии часто применяется в промышленной сфере для управления различными электроприборами. В бытовых устройствах он устанавливается довольно редко. Особенностью таких бесколлекторных модификаций можно назвать повышенную частотность. При этом параметр мощности у них менять просто. Катушки в данных модификациях встречаются самые разнообразные. Также следует отметить, что магниты чаще всего устанавливаются на внешней стороне роторной коробки.
Затворы в основном используются изолированного типа. Монтироваться они могут как у статорной коробки, так и сердечника. В целом регулировка устройства происходит довольно быстро. Однако следует учитывать также и недостатки таких систем. В первую очередь они связаны с перебоями питания при низких частотах. Также важно упомянуть, что у моделей данного типа потребление электроэнергии довольно большое. При этом для управления интегральными электроприводами устройства не подходят.
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.
Модели с датчиками Холла
Бесколлекторные двигатели с датчиками Холла широко используются в приборах нагрева. При этом подходят они для электроприводов различного класса. Непосредственно регуляторы используются только одноканальные. Катушки в устройстве устанавливаются медного типа. При этом величина зубцов модели зависит исключительно от производителя. Непосредственно колодки для устройств подбираются контактного типа. На сегодняшний день датчики чаще всего устанавливаются со стороны статора. Однако на рынке представлены также модели с нижним их расположением. В таком случае габариты бесколлекторного двигателя будут немного большими.
Низкочастотные модификации
Низкочастотный бесколлекторный двигатель на сегодняшний день активно используется в промышленной сфере. При этом для морозильных камер он подходит идеально. В среднем параметр полезного действия у него находится на уровне 70%. Затворы у моделей чаще всего используются с изоляторами. При этом тиристорные модификации в наше время встречаются довольно часто.
Системы управления используются серии АВР. При этом частотность модели зависит от типа сердечника и не только. Также следует учитывать, что существуют модели с двойными роторами. В данном случае магниты располагаются вдоль пластины. Статоры чаще всего используются с медной обмоткой. При этом низкочастотные бесколлекторные двигатели с датчиками встречаются очень редко.
Высокочастотные двигатели
Указанные модификации наиболее востребованными считаются для резонансных электроприводов. В промышленности такие модели встречаются довольно часто. Датчики у них устанавливаются как электронного, так индуктивного типа. При этом катушки чаще всего имеются на внешней стороне пластины. Роторы монтируют как в горизонтальном, так и вертикальном положении.
Непосредственно изменение частотности у таких устройств осуществляется через контроллеры. Устанавливаются они, как правило, со сложной контактной системой. Непосредственно стартеры используются только двойного типа. В свою очередь, системы управления зависят от мощности бесколлекторного устройства.
Двигатели в мультироторных аппаратах бывают двух типов: коллекторные и бесколлекторные. Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в .
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.
Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший вращательный момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели при помощи водоотталкивающей смазки.
- Наименьшие радиопомехи
Минусы:
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.
Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше — тем лучше.
Принцип действия которого основан на частотном регулировании и самосинхронизации получил название бесколлекторного двигателя. В данной конструкции, вектор магнитного поля статора управляется относительно положения ротора. Бесколлекторный двигатель был создан для того, чтобы улучшить свойства стандартных коллекторных электродвигателей постоянного тока.
Он органично соединил в себе самые лучшие качества двигателей постоянного тока и бесконтактных электродвигателей.
Основные отличия от обычных двигателей
Бесколлекторный двигатель нередко используются в радиоуправляемых моделях летательных аппаратов. Их выдающиеся характеристики и живучесть получили широкую популярность, благодаря отсутствию трущихся деталей в виде щеток, которые осуществляют передачу тока.
Для того, чтобы более полно представить разницу, нужно вспомнить, что в стандартном коллекторном электродвигателе происходит вращение ротора с обмотками внутри статора, основой которого служат постоянные магниты. Коммутация обмоток производится с помощью коллектора, в зависимости от положения ротора. В электродвигателе переменного тока, наоборот, ротор с магнитом вращается внутри статора с обмотками. Примерно такую же конструкцию имеет двигатель.
В отличие от стандартных двигателей, в бесколлекторном в качестве подвижной части выступает статор, в котором размещены постоянные магниты, а роль неподвижной части играет ротор с трехфазными обмотками.
Принцип работы бесколлекторного электродвигателя
Вращение двигателя осуществляется путем смены направления магнитного поля в обмотках ротора в определенной последовательности. В этом случае, постоянные магниты взаимодействуют с магнитными полями ротора и приводят в движение подвижный статор. В основе этого движения лежит основное свойство магнитов, когда одноименные полюса отталкиваются, а разноименные — притягиваются.
Управление магнитными полями в обмотках ротора и их сменой, происходит с помощью контроллера. Он представляет собой достаточно сложное устройство, способное коммутировать высокие токи с большой скоростью. Контроллер обязательно имеет в своей схеме бесколлекторный электродвигатель, что в значительной степени удорожает его использование.
В бесколлекторных электродвигателях отсутствуют какие-либо вращающиеся контакты и любые контакты, способные переключаться. В этом состоит их главное преимущество перед обычными электродвигателями, поскольку все потери от трения сведены к минимуму.
Наверняка задавался вопросом, чем же отличается такой двигатель от других двигателей, например от тех, что стоят в сверлильных станках. Двигатели, установленные в не очень мощных станках, обычно не искрят, и работают они не так шумно, как та же дрель, обладающая меньшей чем станок мощностью.
В чем же дело? Дело в том, что двигатель с щетками — это коллекторный двигатель, а двигатель без щеток — бесколлекторный
. Для решения разных задач подойдет свой тип двигателя — где-то лучше подойдет коллекторный, а где-то можно установить только бесколлекторный.
Коллекторный двигатель
Двигатель коллекторный имеет, как правило, всего два провода питания, он прост в управлении, достаточно регулировать постоянное или переменное напряжение питания и обороты станут соответственно меняться. Управлять коллекторным двигателем можно даже при помощи нехитрого диммера. Главное достоинство коллекторного двигателя — высокие обороты (десятки тысяч в минуту) при высоком крутящем моменте.
Принцип работы коллекторного двигателя очень прост. По сути, ротор его представляет собой набор медных рамок в магнитопроводе, которые поочередно коммутируются к источнику питания на коллекторно-щеточном узле. Статор может быть как из постоянных магнитов, так и с обмоткой, питаемой от того же источника, что и ротор, или от отдельного источника, а иногда статор и ротор включены в единую последовательную цепь (как например двигатели стиральных машинок-автоматов).
На каждую из секций обмотки ротора, через коллекторно-щеточный узел, поочередно, в процессе вращения ротора, подается электрический ток, в результате ротор перемагничивается, приобретая четко выраженные северный и южный магнитные полюсы, благодаря которым и происходит вращение ротора внутри статора (полюсы ротора выталкиваются полюсами статора, затем ротор дальше перемагничивается и вновь выталкивается). Поскольку ротор каждый раз коммутируется к источнику питания очередной секцией, вращение не останавливается, пока на коллектор подается питание.
Основной недостаток коллекторного двигателя
Обороты коллекторного двигателя очень удобно регулировать, но когда они достаточно высоки, щетки дают о себе знать. Поскольку щетки все время плотно прилегают к коллектору, на высоких оборотах они быстро изнашиваются, со временем так или иначе засоряются, и в конце концов начинают искрить.
Износ щеток, и вообще коллекторно-щеточного узла, ведет к снижению эффективности коллекторного двигателя. Таким образом, сам коллекторно-щеточный узел — это и есть главный недостаток коллекторных двигателей
. Сегодня от коллекторных двигателей стараются отказываться в пользу бесщеточных шаговых.
У бесколлекторного двигателя нет ни коллектора, ни щеток. Простейший пример бесколлекторного двигателя — асинхронный трехфазный двигатель с ротором типа «беличья клетка». Еще один пример бесколлекторного двигателя — более современный — шаговый двигатель с магнитным ротором
. Обмотки статора бесколлекторного двигателя сами перемагничиваются так, чтобы ротор все время разворачивался и непрерывно таким образом вращался.
Чаще всего современные бесколлекторные двигатели оснащаются датчиком положения ротора, по сигналам с которого работает регулятор скорости вращения двигателя. Сигнал с датчика положения ротора передается на процессор более 100 раз в секунду, в результате получается точное позиционирование ротора и высокий крутящий момент. Бывают, конечно, бесколлекторные двигатели и без датчика положения ротора, яркий пример — тот же асинхронный трехфазный мотор. Моторы без датчика положения стоят дешевле чем с датчиком.
Достоинства бесколлекторных двигателей
Поскольку ресурс подшипников ротора крайне велик, можно сказать, что в бесколлекторном двигателе практически отсутствуют изнашиваемые со временем детали, и он вообще не требует обслуживания в процессе эксплуатации. Здесь сведено к минимуму трение, отсутствует проблема перегрева коллектора, в целом надежность и эффективность бесколлекторных двигателей очень высоки.
Нет искрящих щеток, датчик положения ротора поможет сделать управление точным, — недостатков практически нет, одни достоинства. Разве что цена качественных шаговых двигателей выше чем у коллекторных (плюс драйвер), но это ничто по сравнению с регулярной заменой пружин, щеток и коллекторов у коллекторных двигателей.
Двигателем постоянного тока называют электрический двигатель, питание которого обеспечивает постоянный ток. При необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую оськоторых менее 0,5 мм.
Двигателем переменного тока называют электрический двигатель, питание которого обеспечивает переменный ток
. Существуют следующие типы двигателей переменного тока:
Также существует УКД (универсальный коллекторный двигатель) с функцией режима работы как на переменном, так и на постоянном токе.
Ещё один тип двигателей – это шаговый электродвигатель с конечным числом положений ротора
. Определённое указанное положение ротора фиксируется при помощи подачи питания на необходимые соответствующие обмотки. При снятии напряжения питания с одной обмотки и его передаче на другие происходит процесс перехода в другое положение.
Двигатель переменного тока при питании посредством промышленной сети обычно не позволяет достичь частоты вращения более трёх тысяч оборотов в минуту
. По этой причине при необходимости получить более высокие частоты используется коллекторный двигатель, дополнительными преимуществами которого является лёгкость и компактность при сохранении необходимой мощности.
Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Ресурс любого асинхронного двигателя переменного тока заметно выше коллекторного. Определяется он состоянием изоляции обмоток и подшипников
. Синхронный же двигатель при использовании инвертора и датчика положения ротора считается электронным аналогом классического коллекторного двигателя, поддерживающего работу посредством постоянного тока.
Бесколлекторный электродвигатель постоянного тока. Общие сведения и устройство прибора
Бесколлекторный электродвигатель постоянного тока также называют трёхфазным вентильным двигателем. Он представляет собой синхронное устройство, принцип работы которого основывается на самосинхронизированном частотном регулировании, благодаря чему происходит управление вектором (отталкиваясь от положения ротора) магнитного поля статора.
Контроллеры электродвигателей такого типа зачастую питаются благодаря постоянному напряжению, отчего и получили своё название. В англоязычной технической литературе вентильный электродвигатель называют PMSM или BLDC.
Бесколлекторный электродвигатель был создан в первую очередь для оптимизации любого электродвигателя постоянного тока
в целом. К исполнительному механизму такого устройства (особенно к высокооборотному микроприводу с точным позиционированием) ставились очень высокие требования.
Это, пожалуй, и обусловило использование таких специфических приборов постоянного тока, бесколлекторные трёхфазные двигатели, также называемые БДПТ. По своей конструкции они практически идентичны синхронным двигателям переменного тока, где вращение магнитного ротора происходит в обычном шихтованном статоре при наличии трёхфазных обмоток, а количество оборотов зависит напряжения и нагрузок статора. Исходя из определённых координат ротора, происходит переключение разных обмоток статора.
Бесколлекторные двигатели постоянного тока могут существовать без каких-либо отдельных датчиков, однако, иногда они присутствуют на роторе, например, датчик Холла. Если устройство работает без дополнительного датчика, то обмотки статора выполняют функцию фиксирующего элемента
. Тогда ток возникает благодаря вращению магнита, когда в обмотке статора ротор наводит ЭДС.
Если одна из обмоток будет выключена, то будет измеряться и в дальнейшем обрабатываться тот сигнал, который был наведён, однако, такой принцип работы невозможен без профессора обработки сигналов. А вот для реверса или торможения такого электродвигателя мостовая схема не нужна – достаточно будет подачи в обратной последовательности управляющих импульсов на обмотки статора.
В ВД (вентильном двигателе) индуктор в виде постоянного магнита расположен на роторе, а якорная обмотка – на статоре. Исходя из положения ротора, формируется напряжение питания всех обмоток
электродвигателя. При использовании в таких конструкциях коллектора, его функцию будет выполнять в вентильном двигателе полупроводниковый коммутатор.
Основное отличие синхронного и вентильного двигателей заключается в самосинхронизации последнего при помощи ДПР, что обусловливает пропорциональную частоту вращения ротора и поля.
Чаще всего бесколлекторный электродвигатель постоянного тока находит применение в следующих сферах:
Статор
Это устройство имеет классическую конструкцию и напоминает такой же прибор асинхронной машины. В состав входит сердечник из медной обмотки
(уложенной по периметру в пазы), определяющей количество фаз, и корпус. Обычно синусной и косинусной фаз достаточно для вращения и самозапуска, однако, часто вентильный двигатель создают трёхфазным и даже четырёхфазным.
Электродвигатели с обратной электродвижущей силой по типу укладки витков на обмотке статора делятся на два типа:
- синусоидальной формы;
- трапецеидальной формы.
В соответствующих видах двигателя электрический фазный ток меняется также по способу питания синусоидально или трапецеидально.
Ротор
Обычно ротор изготавливают из постоянных магнитов с количеством пар полюсов от двух до восьми, которые, в свою очередь, чередуются от северного к южному или наоборот.
Самыми распространёнными и дешёвыми для изготовления ротора считаются ферритовые магниты, но их недостатком является низкий уровень магнитной индукции
, поэтому на замену такому материалу сейчас приходят приборы, созданные из сплавов различных редкоземельных элементов, поскольку могут предоставить высокий уровень магнитной индукции, что, в свою очередь, позволяет уменьшить размер ротора.
ДПР
Датчик положения ротора обеспечивает обратную связь. По принципу работы устройство делится на такие подвиды:
- индуктивный;
- фотоэлектрический;
- датчик с эффектом Холла.
Последний тип получил наибольшую популярность благодаря своим практически абсолютным безынерционным свойствам
и способности избавляться по положению ротора от запаздывания в каналах обратной связи.
Система управления
Система управления состоит из силовых ключей, иногда также из тиристоров или силовых транзисторов, включающих изолированный затвор, ведущих к сбору инвертора тока либо инвертора напряжения. Процесс управления этими ключами реализуется чаще всего путём использования микроконтроллера
, требующего для управления двигателем огромного количества вычислительных операций.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током
и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
Коммутацию следует производить таким образом, чтобы Ф0 (поток возбуждения ротора) поддерживался относительно потока якоря постоянным. При взаимодействии такого возбуждения и потока якоря формируется вращающий момент М, стремящийся развернуть ротор и параллельно обеспечить совпадение возбуждения и потока якоря. Однако во время поворота ротора происходит переключение различных обмоток под воздействием датчика положения ротора, в результате чего поток якоря разворачивается по направлению к следующему шагу.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Управление двигателем
Контроллер бесколлекторного электродвигателя постоянного тока совершает регулирование действующего на ротор момента, меняя величину широтно-импульсной модуляции. Коммутация при этом контролируется и осуществляется посредством электроники
, в отличие от обычного щёточного двигателя постоянного тока. Также распространёнными являются системы управления, которые для рабочего процесса реализуют алгоритмы широтно-импульсной модуляции и широтно-импульсного регулирования.
Двигатели на векторном управлении обеспечивают самый широкий из всех известных диапазонов для регулирования собственной скорости. Регулирование этой скорости, как и поддержание потокосцепления на необходимом уровне, происходит благодаря преобразователю частоты.
Особенностью регулирования электропривода, основанного на векторном управлении, является наличие контролируемых координат. Они находятся в неподвижной системе и преобразуются во вращающуюся
, выделяя пропорциональное контролируемым параметрам вектора постоянное значение, благодаря чему формируется управляющее воздействие, а затем обратный переход.
Несмотря на все преимущества такой системы, она сопровождается и недостатком в виде сложности управления устройством для регулирования скорости в широком диапазоне.
Преимущества и недостатки
В наше время во многих отраслях промышленности такой тип двигателя пользуется огромным спросом, ведь бесколлекторный электродвигатель постоянного тока объединил в себе едва ли не все самые лучшие качества бесконтактных и других типов двигателей.
Неоспоримыми преимуществами вентильного двигателя являются:
Несмотря на весомые положительные моменты, в бесколлекторном электродвигателе постоянного тока
также есть несколько недостатков:
Исходя из вышеизложенного и неразвитости современной электроники в регионе, многие всё ещё считают целесообразным использование обычного асинхронного двигателя с наличием преобразователя частоты.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента
используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
Особенности управления трёхфазным бесколлекторным двигателем
с датчиком по положению на примере датчика Холла:
Заключение
Бесколлекторный электродвигатель постоянного тока имеет массу преимуществ и станет достойным выбором для использования как специалистом, так и простым обывателем.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя. В чем разница между коллекторными и бесколлекторными моторами? Бесколлекторный электродвигатель постоянного тока принцип работы
Это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Это позволяет получить высокий момент на валу. Выглядит это примерно так.
Соединены катушки примерно вот так
Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото
Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7. 2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри
Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
В посылке фирменная коробочка GoolRC
Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.
Маркировка на корпусе
С заднего торца видно подшипник
Заявлена защита от брызг и влаги
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм
Провода имеют термоусадку разного цвета: желтый, оранжевый и синий
Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм
Габариты корпуса двигателя 36х60 мм
Сравнение с коллекторным 775 двигателем
Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя
Сравнение с другими модельными двигателями
Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением.
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно
Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))
На корпусе присутствует маркировка с названием и характеристиками, что очень удобно
Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller
В наборе также присутствует сервомашинка GoolRC на 9 кг.
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)
Макрофото вала сервомашинки
Пробуем закрепить крестообразный рычаг для фотографии
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические.
Фото платы управления сервой
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на . Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока.
Я выбрал один из и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)
Скрин из программы для печати на принтере
Заодно напечатал и хомут для крепления сверху
Мотор 3660 с установленным цанговым патроном типа ER11
Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.
Соединяем все, по цветам.
Источник показывает, что холостой ток контроллера небольшой (0.26А)
Теперь сверлильный станок.
Собираем все и крепим на стойку
Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера
Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат
Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15
со скидкой 5% на все товары магазина.
Спасибо за внимание!
Планирую купить
+61
Добавить в избранное
Обзор понравился
+92
+156
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т. д.).
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Принцип действия которого основан на частотном регулировании и самосинхронизации получил название бесколлекторного двигателя. В данной конструкции, вектор магнитного поля статора управляется относительно положения ротора. Бесколлекторный двигатель был создан для того, чтобы улучшить свойства стандартных коллекторных электродвигателей постоянного тока.
Он органично соединил в себе самые лучшие качества двигателей постоянного тока и бесконтактных электродвигателей.
Основные отличия от обычных двигателей
Бесколлекторный двигатель нередко используются в радиоуправляемых моделях летательных аппаратов. Их выдающиеся характеристики и живучесть получили широкую популярность, благодаря отсутствию трущихся деталей в виде щеток, которые осуществляют передачу тока.
Для того, чтобы более полно представить разницу, нужно вспомнить, что в стандартном коллекторном электродвигателе происходит вращение ротора с обмотками внутри статора, основой которого служат постоянные магниты. Коммутация обмоток производится с помощью коллектора, в зависимости от положения ротора. В электродвигателе переменного тока, наоборот, ротор с магнитом вращается внутри статора с обмотками. Примерно такую же конструкцию имеет двигатель.
В отличие от стандартных двигателей, в бесколлекторном в качестве подвижной части выступает статор, в котором размещены постоянные магниты, а роль неподвижной части играет ротор с трехфазными обмотками.
Принцип работы бесколлекторного электродвигателя
Вращение двигателя осуществляется путем смены направления магнитного поля в обмотках ротора в определенной последовательности. В этом случае, постоянные магниты взаимодействуют с магнитными полями ротора и приводят в движение подвижный статор. В основе этого движения лежит основное свойство магнитов, когда одноименные полюса отталкиваются, а разноименные — притягиваются.
Управление магнитными полями в обмотках ротора и их сменой, происходит с помощью контроллера. Он представляет собой достаточно сложное устройство, способное коммутировать высокие токи с большой скоростью. Контроллер обязательно имеет в своей схеме бесколлекторный электродвигатель, что в значительной степени удорожает его использование.
В бесколлекторных электродвигателях отсутствуют какие-либо вращающиеся контакты и любые контакты, способные переключаться. В этом состоит их главное преимущество перед обычными электродвигателями, поскольку все потери от трения сведены к минимуму.
Наверняка у каждого новичка, который впервые связал свою жизнь с электромоделями на радиоуправлении, после тщательного изучения начинки, появляется вопрос. Что такое коллекторный (Brushed) и ? Какой из них лучше поставить на свою радиоуправляемую электромодель?
Коллекторные моторы, которые так часто используются для приведения в движение электромоделей на радиоуправлении, имеют всего два исходящих питающих провода. Один из них «+» другой « — ». В свою очередь они подключаются к регулятору скорости вращения. Разобрав коллекторный мотор, вы всегда там найдете 2 магнита изогнутой формы, вал совместно с якорем, на который намотана медная нить (проволока), где по одну сторону вала стоит шестерня, а по другую сторону располагается коллектор, собранный из пластин, в составе которых чистая медь.
Принцип работы коллекторного мотора
Электрический ток (DC или direct current), поступая на обмотки якоря (в зависимости от их количества на каждую по очереди) создает в них электромагнитное поле, которое с одной стороны имеет южный полюс, а с другой стороны северный.
Многие знают, что, если взять два любых магнита и приставить их одноименными полюсами
друг другу, то они не за что не сойдутся, а если приставить разноименными, то они прилипнут так, что не всегда возможно их разъединить.
Так вот, это электромагнитное поле, которое возникает в любой из обмоток якоря, взаимодействуя с каждым из полюсов магнитов статора, приводит в действие (вращение) сам якорь. Далее ток, через коллектор и щетки переходит к следующей обмотке и так последовательно, переходя от одной обмотки якоря к другой, вал электродвигателя совместно с якорем вращается, но лишь до тех пор, пока к нему подается напряжение.
В стандартном коллекторном моторе якорь имеет три полюса (три обмотки) – это сделано для того чтобы движок не «залипал» в одном положении.
Минусы коллекторных моторов
Сами по себе коллекторные моторы неплохо справляются со своей работой, но это лишь до того момента пока не возникает необходимость получить от них на выходе максимально высокие обороты. Все дело в тех самых щетках, о которых упоминалось выше. Так как они всегда находятся в плотном контакте с коллектором, то в результате высоких оборотов в месте их соприкосновения возникает трение, которое в дальнейшем вызовет скорый износ обоих и в последствии приведёт к потере эффективной мощности эл. двигателя. Это самый весомый минус таких моторов, который сводит на нет все его положительные качества.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.
Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Плюсы бесколлекторных моторов
Почти нет изнашиваемых деталей. Почему «почти», потому что вал ротора устанавливается на подшипники, которые в свою очередь имеют свойство изнашиваться, но ресурс у них крайне велик, да и взаимозаменяемость их очень проста. Такие моторы очень надежны и эффективны. Устанавливается датчик контроля положения ротора. На коллекторных моторах работа щеток всегда сопровождается искрением, что впоследствии вызывает помехи в работе радиоаппаратуры. Так вот у бесколлектоных, как вы уже поняли, эти проблемы исключены. Нет трения, нет перегрева, что так же является существенным преимуществом. По сравнению с коллекторными моторами не требуют дополнительного обслуживания в процессе эксплуатации.
Минусы бесколлекторных моторов
У таких моторов минус только один, это цена. Но если посмотреть на это с другой стороны, и учесть тот факт что эксплуатация освобождает владельца сразу от таких заморочек как замена пружин, якоря, щеток, коллекторов, то вы с легкостью отдадите предпочтение в пользу последних.
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т. д.).
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Бесколлекторные и щеточные двигатели постоянного тока: когда и почему лучше выбрать один из них | Артикул
Pete Millett
ЗАГРУЗИТЬ PDF
Получайте ценные ресурсы прямо на свой почтовый ящик — рассылка раз в месяц
Подписаться
Мы ценим вашу конфиденциальность . Поскольку реализовать системы управления с использованием двигателей постоянного тока проще, чем с двигателями переменного тока, они часто используются, когда необходимо контролировать скорость, крутящий момент или положение.
Существует два типа широко используемых двигателей постоянного тока: коллекторные двигатели и бесщеточные двигатели (или двигатели BLDC). Как следует из их названий, щеточные двигатели постоянного тока имеют щетки, которые используются для коммутации двигателя, чтобы заставить его вращаться. Бесщеточные двигатели заменяют функцию механической коммутации электронным управлением.
Во многих случаях можно использовать коллекторный или бесщеточный двигатель постоянного тока. Они функционируют на основе тех же принципов притяжения и отталкивания между катушками и постоянными магнитами. У обоих есть преимущества и недостатки, которые могут заставить вас выбрать один из них, в зависимости от требований вашего приложения.
Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока (изображение предоставлено maxon group)
В двигателях постоянного тока для создания магнитного поля используются витки проволоки. В щеточном двигателе эти катушки могут свободно вращаться, приводя в движение вал — они являются частью двигателя, которая называется «ротор». Обычно катушки наматываются на железный сердечник, хотя есть и щеточные двигатели без сердечника, в которых обмотка является самоподдерживающейся.
Неподвижная часть двигателя называется «статором». Постоянные магниты используются для создания стационарного магнитного поля. Обычно эти магниты располагаются на внутренней поверхности статора снаружи ротора.
Чтобы создать крутящий момент, который заставляет ротор вращаться, магнитное поле ротора должно непрерывно вращаться, чтобы его поле притягивало и отталкивало неподвижное поле статора. Чтобы заставить поле вращаться, используется скользящий электрический переключатель. Переключатель состоит из коммутатора, который обычно представляет собой сегментированный контакт, закрепленный на роторе, и неподвижных щеток, закрепленных на статоре.
По мере вращения ротора различные наборы обмоток ротора постоянно включаются и выключаются коммутатором. Это заставляет катушки ротора постоянно притягиваться и отталкиваться от неподвижных магнитов статора, что заставляет ротор вращаться.
Поскольку существует некоторое механическое трение между щетками и коллектором, а так как это электрический контакт, его, как правило, нельзя смазывать, в течение срока службы двигателя происходит механический износ щеток и коллектора. Этот износ в конечном итоге достигнет точки, когда двигатель больше не работает. Многие щеточные двигатели, особенно большие, имеют сменные щетки, обычно сделанные из углерода, которые предназначены для поддержания хорошего контакта по мере износа. Эти двигатели требуют периодического обслуживания. Даже со сменными щетками со временем коллектор также изнашивается до такой степени, что двигатель необходимо заменить.
Для привода щеточного двигателя на щетки подается постоянное напряжение, которое пропускает ток через обмотки ротора, заставляя двигатель вращаться.
В тех случаях, когда требуется вращение только в одном направлении, а скорость или крутящий момент не нужно контролировать, для коллекторного двигателя вообще не требуется приводной электроники. В подобных приложениях напряжение постоянного тока просто включается и выключается, чтобы заставить двигатель работать или останавливаться. Это типично для недорогих приложений, таких как моторизованные игрушки. Если требуется реверс, это можно сделать с помощью двухполюсного выключателя.
Для облегчения управления скоростью, крутящим моментом и направлением используется «H-мост», состоящий из электронных переключателей — транзисторов, IGBT или MOSFET, — позволяющий двигателю вращаться в любом направлении. Это позволяет подавать напряжение на двигатель любой полярности, что заставляет двигатель вращаться в противоположных направлениях. Скоростью двигателя или крутящим моментом можно управлять с помощью широтно-импульсной модуляции одного из переключателей.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока (изображение предоставлено maxon group)
Бесщеточные двигатели постоянного тока работают по тому же принципу магнитного притяжения и отталкивания, что и щеточные двигатели, но имеют несколько иную конструкцию. Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации. Это требует использования активной управляющей электроники.
В бесщеточном двигателе к ротору прикреплены постоянные магниты, а к статору — обмотки. Бесщеточные двигатели могут быть сконструированы с ротором внутри, как показано выше, или с ротором снаружи обмоток (иногда его называют двигателем с опережением).
Количество обмоток, используемых в бесщеточном двигателе, называется количеством фаз. Хотя бесщеточные двигатели могут иметь разное количество фаз, трехфазные бесщеточные двигатели являются наиболее распространенными. Исключением являются небольшие охлаждающие вентиляторы, которые могут использовать только одну или две фазы.
Три обмотки бесщеточного двигателя соединены по схеме «звезда» или «треугольник». В любом случае к двигателю подключаются три провода, а технология привода и форма сигнала идентичны.
Трехфазные двигатели могут быть сконструированы с различными магнитными конфигурациями, называемыми полюсами. Простейшие трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов, один северный и один южный. Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Большее количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются при меньшем количестве полюсов.
Для привода трехфазного бесщеточного двигателя каждая из трех фаз должна быть подключена либо к входному напряжению питания, либо к земле. Для этого используются три схемы привода «полумост», каждая из которых состоит из двух ключей. Переключатели могут быть биполярными транзисторами, IGBT или MOSFET, в зависимости от требуемого напряжения и тока.
Существует ряд методов привода, которые можно использовать для трехфазных бесщеточных двигателей. Самые простые называются трапециевидной, блочной или 120-градусной коммутацией. Трапециевидная коммутация чем-то похожа на метод коммутации, используемый в щеточном двигателе постоянного тока. В этой схеме в любой момент времени одна из трех фаз соединена с землей, одна оставлена разомкнутой, а другая подключена к напряжению питания. Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, модулируется по ширине импульса. Поскольку фазы переключаются резко в каждой точке коммутации, а вращение ротора постоянно, при вращении двигателя возникает некоторое изменение крутящего момента (называемое пульсацией крутящего момента).
Для повышения производительности можно использовать другие методы коммутации. Синусоидальная или 180-градусная коммутация постоянно пропускает ток через все три фазы двигателя. Электроника привода генерирует синусоидальный ток через каждую фазу, каждая из которых смещена на 120 градусов относительно другой. Этот метод привода сводит к минимуму пульсации крутящего момента, а также акустический шум и вибрацию и часто используется для высокопроизводительных или высокоэффективных приводов.
Чтобы правильно вращать поле, управляющая электроника должна знать физическое положение магнитов на роторе относительно статора. Часто информацию о положении получают с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая заставляет ротор вращаться.
Используя три датчика Холла, трапециевидную коммутацию можно реализовать с помощью простой комбинационной логики, поэтому нет необходимости в сложной управляющей электронике. Другие методы коммутации, такие как синусоидальная коммутация, требуют немного более сложной управляющей электроники и обычно используют микроконтроллер.
Помимо обеспечения обратной связи по положению с помощью датчиков Холла, существуют различные методы, которые можно использовать для определения положения ротора без датчиков. Самый простой способ — контролировать противо-ЭДС на невозбужденной фазе, чтобы измерить магнитное поле относительно статора. Более сложный алгоритм управления, называемый Field Oriented Control или FOC, вычисляет положение на основе токов ротора и других параметров. FOC обычно требует довольно мощного процессора, так как многие вычисления должны выполняться очень быстро. Это, конечно, дороже, чем простой трапециевидный способ управления.
Коллекторные и бесщеточные двигатели: преимущества и недостатки
В зависимости от области применения существуют причины, по которым вы можете предпочесть бесщеточный двигатель щеточному двигателю. В следующей таблице приведены основные преимущества и недостатки каждого типа двигателя:
| Коллекторный двигатель | Бесщеточный двигатель | |
| Срок службы | Короткая (изнашиваются щетки) | Длинный (без щеток) |
| Скорость и ускорение | Средний | Высокий |
| Эффективность | Средний | Высокий |
| Электрический шум | Шумный (дуговой) | Тихий |
| Акустический шум и пульсация крутящего момента | Бедный | Средний (трапециевидный) или хороший (синусоидальный) |
| Стоимость | Самый низкий | Средний (добавленная электроника) |
Срок службы
Как упоминалось ранее, одним из недостатков щеточных двигателей является механический износ щеток и коллектора. В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
Скорость и ускорение
Скорость вращения щеточных двигателей может быть ограничена щетками и коллектором, а также массой ротора. На очень высоких скоростях контакт щетки с коллектором может стать неустойчивым, и искрение щетки увеличится. В большинстве щеточных двигателей также используется сердечник из многослойного железа в роторе, что придает им большую инерцию вращения. Это ограничивает скорость разгона и торможения двигателя. Можно построить бесщеточный двигатель с очень мощными редкоземельными магнитами на роторе, что минимизирует инерцию вращения. Конечно, это увеличивает стоимость.
Электрические помехи
Щетки и коллектор образуют своего рода электрический переключатель. При вращении двигателя переключатели размыкаются и замыкаются, а через обмотки ротора, которые являются индуктивными, протекает значительный ток. Это приводит к искрению на контактах. Это создает большое количество электрических помех, которые могут попасть в чувствительные цепи. Возникновение дуги можно несколько смягчить, добавив конденсаторы или гасители RC между щетками, но мгновенное переключение коммутатора всегда вызывает электрический шум.
Акустический шум
Коллекторные двигатели имеют «жесткое переключение», то есть ток резко переходит с одной обмотки на другую. Создаваемый крутящий момент меняется в зависимости от вращения ротора, когда обмотки включаются и выключаются. В бесщеточном двигателе можно управлять токами обмоток таким образом, чтобы ток постепенно переходил от одной обмотки к другой. Это снижает пульсацию крутящего момента, которая представляет собой механическую пульсацию энергии на роторе. Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Стоимость
Поскольку бесщеточные двигатели требуют более сложной электроники, общая стоимость бесщеточного привода выше, чем у щеточного двигателя. Несмотря на то, что бесщеточный двигатель проще в производстве, чем щеточный двигатель, поскольку в нем отсутствуют щетки и коммутатор, технология щеточного двигателя является очень зрелой, а производственные затраты низки. Ситуация меняется по мере того, как бесщеточные двигатели становятся все более популярными, особенно в крупносерийном производстве, например, в автомобильных двигателях. Кроме того, стоимость электроники, такой как микроконтроллеры, продолжает снижаться, что делает бесколлекторные двигатели более привлекательными.
Резюме
Из-за снижения стоимости и повышения производительности бесщеточные двигатели становятся все более популярными во многих областях применения. Но есть еще места, где щеточные двигатели имеют больше смысла.
Многому можно научиться, глядя на внедрение бесколлекторных двигателей в автомобилях. По состоянию на 2020 год большинство двигателей, которые работают всякий раз, когда работает автомобиль, такие как насосы и вентиляторы, перешли с щеточных двигателей на бесщеточные для повышения их надежности. Дополнительная стоимость двигателя и электроники более чем компенсирует более низкий уровень отказов в полевых условиях и снижение требований к техническому обслуживанию.
С другой стороны, двигатели, которые используются нечасто, например, двигатели, приводящие в движение сиденья с электроприводом и электрические стеклоподъемники, остались преимущественно щеточными. Причина в том, что общее время работы в течение срока службы автомобиля очень мало, и очень маловероятно, что двигатели откажут в течение срока службы автомобиля.
По мере того, как стоимость бесщеточных двигателей и связанной с ними электроники продолжает снижаться, бесщеточные двигатели находят применение в приложениях, которые традиционно использовались щеточными двигателями. В качестве еще одного примера из автомобильного мира: двигатели регулировки сидений в картах высокого класса используют бесщеточные двигатели, поскольку они создают меньший акустический шум.
Технический форум
Получить техническую поддержку
Бесщеточные двигатели постоянного тока | Двигатели BLDC от NANOTEC
Бесщеточные двигатели постоянного тока, сокращенно называемые двигателями BLDC, несмотря на свое название, представляют собой трехфазные синхронные машины: ротор следует за магнитным вращательным полем, а движение синхронно с напряжением переменного тока, приложенным к обмоткам. Этот тип двигателя часто называют «бесщеточным двигателем постоянного тока», потому что во многих приложениях он заменяет двигатели постоянного тока щетками (щеточные двигатели постоянного тока или коллекторные двигатели). В щеточном двигателе постоянного тока подается напряжение постоянного тока, генерирующее переменный ток, не зависящий от скорости, с помощью механического инвертора в двигателе — щеток.
Вместе с электронным контроллером привода, который берет на себя управление работой щеток и преобразует подаваемый постоянный ток в переменный, двигатель BLDC обеспечивает производительность, сравнимую с работой коллекторного двигателя постоянного тока — без щеток, которые имеют ограниченный срок службы. Поэтому двигатели BLDC также называют двигателями EC (с электронной коммутацией), чтобы отличить их от двигателей с механической коммутацией и щетками.
Другим часто используемым термином является синхронный двигатель с постоянными магнитами. Здесь «постоянный магнит» используется, чтобы отличить его от других синхронных двигателей, которые работают с обмоткой возбуждения на роторе, тогда как BLDC постоянно находится под напряжением. Другими словами, ротор двигателя создает магнитное поле с помощью постоянного магнита, даже если статор не находится под напряжением.
Термины PMSM и BLDC часто сопоставляют, чтобы различать двигатели PMSM с синусоидальным индуктивным напряжением (противо-ЭДС) и двигатели BLDC с трапециевидным индуктивным напряжением (см. ниже). Сегодня большинство двигателей BLDC демонстрируют синусоидальную противоЭДС.
1. Структура/типы
Большинство двигателей BLDC представляют собой «двигатели с внутренним ротором», в которых ротор вращается с помощью постоянных магнитов на валу в неподвижном статоре с катушками. В «двигателях с внешним ротором» статор расположен внутри, а ротор состоит из вращающегося снаружи колоколообразного корпуса, в котором установлены магниты.
Преимущества двигателей с внутренним ротором заключаются в низкой инерции ротора и лучшем рассеивании тепла. Напротив, в двигателях с внешним ротором теплогенерирующие катушки изолированы от окружающей среды корпусом ротора и магнитами. Из-за высокого момента инерции ротора и того факта, что корпус ротора с трудом поддается балансировке, двигатели с внешним ротором не подходят для очень высоких скоростей вращения.
Соответственно, двигатели с внутренним ротором используются в большинстве промышленных применений. Двигатели с внешним ротором демонстрируют свои преимущества при серийном применении, поскольку их производство дешевле. Их также можно сделать короче и обычно они имеют меньший момент фиксации, а также больший крутящий момент — благодаря большему диаметру ротора при той же магнитной силе.
Оба двигателя обычно имеют три фазы. Однако существуют также конструкции с одной или двумя фазами. Далее будут описаны только трехфазные двигатели BLDC, потому что Nanotec производит только их.
Двигатели с внутренним и внешним ротором изготавливаются с щелевыми обмотками; здесь провод обмотки наматывается на башмаки полюсов статора (железный сердечник), что позволяет линиям магнитного поля обмотки вытекать и концентрироваться в определенной форме. Статор состоит из тонких, смещенных друг к другу изолированных металлических пластин для сведения к минимуму потерь на вихревые токи.
Двигатели BLDC без пазов представляют собой особый тип двигателя с внутренним ротором, который очень популярен в очень маленьких двигателях. Их статоры состоят только из кольцеобразных металлических пластин, а внутри закреплена плоская, склеенная или герметизированная обмотка. Поскольку нет железного сердечника, индуктивность двигателя очень мала и ток в обмотках быстро возрастает. Кроме того, потери в железе значительно снижены, а двигатели имеют более высокий КПД. При медленной работе положительно сказывается отсутствие пульсаций крутящего момента. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных башмаках и отсутствует фиксирующий крутящий момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, так как их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается незаполненной между обмотками. С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
Двигатель с внутренним ротором Двигатель с постоянным ротором Двигатель постоянного тока без пазов
2.
Управление/коммутация двигателя
Двигатель постоянного тока вращается, потому что постоянный магнит на роторе пытается выровняться в направлении магнитного поля, создаваемого электромагнитами статора. При этом крутящий момент максимален, когда оба магнитных поля перпендикулярны друг другу. Тип управления различают двояко: по форме питания обмоток (блочное или синусоидальное) или по способам определения положения ротора. Необходимо определить положение ротора, так как токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, т.е. он продолжал вращаться с заданной скоростью.
2.1 Коммутация блока
Положение ротора можно легко определить с помощью датчиков Холла в двигателе. Затем они могут переключаться соответствующим образом совмещенным магнитом на роторе в точное время, когда обмотка должна быть переключена. Тогда три обмотки соответствуют трем датчикам Холла; их состояния определяют, как должны быть соединены обмотки. Если три обмотки переключаются цифровым способом, т. е. на обмотках нет тока или полный ток, это называется блочной коммутацией. Эта комбинация датчиков Холла и блочной коммутации является технически самым простым методом приведения в действие бесконтактного двигателя постоянного тока. Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора. Это связано с тем, что выравнивание магнитного поля статора остается постоянным через 60°, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине находится перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30° в точках переключения. В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл. 10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
2.2 Синусоидальная коммутация
Оптимальной формой питания является синусоидальная коммутация, при которой каждая обмотка двигателя питается синусоидальной волной, сдвинутой на 120°, что приводит к постоянно вращающемуся магнитному полю статора с постоянной напряженностью. Как правило, если для определения положения ротора доступны только датчики Холла, можно также использовать синусоидальную коммутацию путем интерполяции между точками переключения. В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора. Однако в случае изменения нагрузки между двумя датчиками Холла синусоида не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
Таким образом, для синусоидальной коммутации в идеале требуется система с более высоким разрешением для определения положения ротора. Обычно он состоит из оптического или магнитного энкодера, который постоянно определяет положение ротора с достаточной точностью и соответствующим образом регулирует ток.
2.3 Поле-ориентированное управление
Иногда поле-ориентированное управление все еще отличается от синусоидальной коммутации; однако часто оба термина используются взаимозаменяемо. Эти термины используются взаимозаменяемо, поскольку синусоидальная коммутация, как описано выше, оптимально управляет магнитным полем статора.
Если не учитывать, как работает сам регулятор тока, разница в описании синусоидальной коммутации не очевидна. Ранее предполагалось, что будет генерироваться синусоидальное значение тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока. Таким образом, обе задачи, значение тока (которое соответствует контуру управления крутящим моментом) и управление током обмоток, обрабатываются отдельно при синусоидальной коммутации или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях могут возникать фазовые сдвиги и искажения токовых потоков, так что магнитное поле статора больше не перпендикулярно ротору.
Полеориентированное управление решает эту проблему, управляя вектором тока непосредственно во вращающейся системе координат ротора. Для этого измеренные токи трех фаз преобразуются посредством преобразования Кларка-Парка в двухосную систему координат ротора. Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого одновременно контролируется в системе координат уровень тока ротора и ориентация магнитного поля. Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
2.4 Бездатчиковое управление
Бездатчиковое управление – это не дополнительный метод управления, а скорее термин для методов, позволяющих определять положение ротора без датчиков (например, датчиков Холла, энкодеров). Эти методы можно условно разделить на два класса:
Простое бездатчиковое управление основано на прямом измерении противо-ЭДС в соответствующей обмотке, не находящейся под напряжением. Однако по сравнению со стандартным контролем этот метод требует специального оборудования и нестабилен ниже прибл. 20 % от номинальной скорости двигателя, так как сигнал измерения слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением одновременно.
Более сложные решения основаны на так называемом «отслеживании наблюдателя», которое воспроизводит значения, не поддающиеся непосредственному измерению, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является чрезвычайно точная модель двигателя, которая параллельно с реальным двигателем вычисляет из известных входных значений, таких как установленный ШИМ, те значения, которые также измеряются, такие как текущий уровень в обмотка. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за ошибки наблюдения, определяемой этим методом, внутренние значения модели двигателя постоянно корректируются. С помощью этого метода также получают более точную оценку значений, которые фактически не измеряются, например скорости. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при низких скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
Общим для обоих бессенсорных методов является то, что информация о положении ротора недоступна на холостом ходу, поэтому требуется специальный метод запуска. Подобно шаговому двигателю, двигатель работает в управляемом режиме в течение нескольких коммутационных циклов, пока не наберет требуемую скорость и бездатчиковое измерение не позволит определить положение ротора.
3. Важные параметры
| Скорость холостого хода | Макс. скорость вращения ненагруженного двигателя, определяемая, прежде всего, константой напряжения |
|---|---|
| Ток холостого хода | Ток на холостом ходу (потребление, необходимое для преодоления трения) |
| Номинальная скорость/номинальный крутящий момент | Номинальная рабочая точка |
| Максимальный крутящий момент | Моментально достижимый крутящий момент, обычно 3-кратный номинальный крутящий момент в течение прибл. 5 с, затем тепловой захват => I2T |
| Постоянный крутящий момент (Нм/А) | Указывает соотношение между крутящим моментом и током |
| Постоянное напряжение (В/об/мин) | Наведенная противо-ЭДС на оборот |
Бесщеточные двигатели | Корпорация Nidec
Технические возможности Nidec
Бесщеточные двигатели постоянного тока
отличаются сниженным энергопотреблением, длительным сроком службы, низким уровнем шума, компактными размерами и малым весом.
Nidec является мировым лидером в разработке и производстве этих высокопроизводительных двигателей.
Щёточные электродвигатели постоянного тока обладают различными преимуществами, такими как высокая эффективность, возможность уменьшения габаритов, возможность работы от электроэнергии и низкие производственные затраты. Однако эти двигатели имеют ряд недостатков, таких как шум из-за трения щеток, образование искр и электрических помех, а также ограниченный срок службы из-за износа щеток. Разработка бесщеточного двигателя постоянного тока решила все эти проблемы.
В бесщеточном двигателе постоянного тока ротор, сделанный из постоянного магнита, приводится в движение магнитной силой цепи обмотки статора. В то время как щеточный двигатель постоянного тока использует щетку и коммутатор для переключения тока, бесщеточный двигатель постоянного тока использует датчик и электронную схему для переключения тока. Разработка этого двигателя стала возможной благодаря развитию технологий полупроводников и периферийных устройств. Этот двигатель имеет преимущества характеристик двигателей постоянного тока (ток и напряжение соответственно пропорциональны крутящему моменту и скорости вращения) и двигателей переменного тока (бесщеточная конструкция). Особенности бесщеточного двигателя постоянного тока включают компактный размер, высокую мощность, длительный срок службы и отсутствие искр и шума, и он используется в широком диапазоне приложений от ПК до бытовой техники.
Характеристики и классификация бесщеточных двигателей постоянного тока
Бесщеточный двигатель постоянного тока «вращает свой магнит».
Ротор, сделанный из магнита, вращается магнитными полями, которые создаются током, протекающим через обмотки статора. Ток переключается датчиком и электронной схемой.
Тип внешнего ротора (ротор снаружи статора)
- Преимущества
- Легко получить большой крутящий момент.
- Скорость стабильна при постоянном вращении.
- Недостатки
- Ротор большой (движение медленное).
- Внешний ротор требует соответствующих мер безопасности.
- Ротор большой (движение медленное).
Тип внутреннего ротора (ротор находится внутри статора)
- Преимущества
- Ротор маленький и может быстро реагировать.
- Змеевик расположен снаружи и уровень отвода тепла высокий.
- Недостатки
- Трудно получить большой крутящий момент.
- Магниты могут быть повреждены центробежной силой.
Таблица сравнения типов двигателей
Бесщеточные двигатели постоянного тока
имеют много преимуществ (в частности, в области эффективности).
По сравнению с другими типами двигателей, бесщеточный двигатель постоянного тока имеет много преимуществ, таких как компактный размер, высокая мощность, низкий уровень вибрации, низкий уровень шума и длительный срок службы.
| Двигатель переменного тока | Универсальный двигатель | Щеточные двигатели постоянного тока | Бесщеточный двигатель постоянного тока | Шаговый двигатель | Серводвигатель | ||||
|---|---|---|---|---|---|---|---|---|---|
| Однофазный | Трехфазный (индукционный) | Трехфазный (синхронный) | Сервер переменного тока | Сервопривод постоянного тока | |||||
| Тип питания | АС | AC/DC | DC | DC (включая драйвер)/драйвер | Драйверы | Драйверы | Драйверы | ||
| Эффективность | 40-60% | 60-70% | 70-80% | 50-60% | 60-80% | 80%- | 60-70% | 50-80% | 60-80% |
| Размер (тот же выход) | Большой | Средний или большой | Большой | Маленький | Маленький | Промежуточный уровень | Маленький или средний | Маленький | |
| Шум | Маленький | Большой | Большой | Маленький | Промежуточный | Маленький | Большой | ||
| Диапазон скоростей | Узкий | Широкий | Промежуточный уровень | Широкий | Широкий | Широкий | Промежуточный уровень | Узкий | |
| Ответ | Медленно | Медленный | Промежуточный уровень | Промежуточный уровень | Промежуточный уровень | Быстро | |||
| Срок службы | Длинный | Короткий | Короткий | Длинный | Длинный | Короткий | |||
| Цена | Низкий | Промежуточный уровень | Низкий | Низкий | Средний или высокий | Промежуточный уровень | Высокий | ||
| Приложения | Стиральные машины Воздуходувки Пылесосы Насосы | Краны Конвейеры Кондиционеры Промышленное оборудование | Компрессоры Посудомоечные машины Стиральные машины | Пылесосы Электроинструменты Соковыжималки | Электрические игрушки Электрические инструменты Автомобильные электрические компоненты Мелкая бытовая техника | Кондиционеры Посудомоечные машины Стиральные машины Мелкая бытовая техника | Роботы Мелкая бытовая техника Оборудование для кондиционирования воздуха | Конвейеры Роботы Станки | Принтеры Плоттеры Рабочие машины |
| Решение | Ориентированная на стоимость | Универсальность | Ориентированная на стоимость | Ориентированная на стоимость | Эффективность Универсальность | Универсальность | Ориентирован на производительность | ||
Компания Nidec имеет значительный опыт в области малых бесщеточных двигателей постоянного тока. Компании принадлежит 80 % мирового рынка шпиндельных двигателей жестких дисков, 60 % мирового рынка двигателей DVD и других оптических приводов и 40 % мирового рынка двигателей вентиляторов. Nidec работает в области малогабаритных прецизионных двигателей, в которой произошел самый быстрый переход на бесщеточные двигатели. Нам удалось наладить массовое производство бесколлекторных двигателей постоянного тока раньше, чем у наших конкурентов, и занять лидирующие позиции на рынке. Кроме того, мы удерживаем позицию № 1 в мире, постоянно внедряя новые технологии, такие как первое в отрасли применение FDB (гидродинамических подшипников), которые удовлетворяют потребности все более точных жестких дисков, а также собственное производство инструментов проектирования и моделирования.
Наиболее плодотворным рынком с точки зрения применения бесколлекторных двигателей постоянного тока становится рынок автомобильных двигателей. Как свидетельствует система гидроусилителя руля, уровень расхода топлива которой можно улучшить на 3-5%, если заменить гидравлическую систему на электрическую, эффект энергосбережения очень высок за счет использования систем электроснабжения. В различных местах все больше и больше гидравлических систем заменяются двигателями. В частности, бесщеточный двигатель постоянного тока играет ведущую роль в замене функций, где требуется управляемость, а также в местах, где часто используются детали и, следовательно, требуются детали с длительным сроком службы. Основная область применения после ГУР – компрессорные двигатели кондиционеров. Кроме того, тяговые двигатели для электромобилей (EV) являются перспективной областью для бесщеточных двигателей постоянного тока. Поскольку система работает от батареи с ограниченной мощностью, двигатель должен быть высокоэффективным и компактным, чтобы его можно было установить в ограниченном пространстве. Благодаря опыту, который мы накопили в области малых прецизионных двигателей, мы стремимся стать компанией № 1 в мире, работающей в области автомобильных двигателей.
Рынок автомобильных компонентов значительно расширяется как область применения бесщеточных двигателей постоянного тока.
Статьи и колонки, связанные с этим продуктом
- Технологии и практические примеры Технические возможности Nidec Решения, основанные на бесколлекторных двигателях постоянного тока
|
Откройте для себя мир приводных технологий maxon
Приводы maxon IDX состоят из двигателя EC-i, магнитного абсолютного энкодера (однооборотный) и контроллера позиционирования EPOS4 со встроенным ориентированным на поле управлением (FOC) . Качественный дизайн соответствует степени защиты IP65; только выходной вал должен быть уплотнен заказчиком. Встроенные датчики температуры на обмотке и в контроллере позиционирования обрабатываются непосредственно в приводе и обеспечивают оптимальное использование рабочего диапазона.
DCX 6 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Система подавления искр (CLL) превращает этот двигатель постоянного тока со щетками из драгоценных металлов в настоящего бегуна на длинные дистанции.
DCX 8 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Система подавления искр (CLL) превращает этот двигатель постоянного тока со щетками из драгоценных металлов в настоящего бегуна на длинные дистанции.
DCX 10 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Дополнительный искрогаситель (CLL) и щетки из драгоценных металлов увеличивают срок службы этого высокопроизводительного двигателя.
DCX 12 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Дополнительный искрогаситель (CLL) делает этот двигатель постоянного тока с щетками из драгоценных металлов настоящим бегуном на длинные дистанции.
DCX 14 доступен в виде небольшого привода с предварительно нагруженными шарикоподшипниками или металлокерамическими подшипниками. Система подавления искр (CLL) превращает этот двигатель постоянного тока со щетками из драгоценных металлов в настоящего бегуна на длинные дистанции.
DCX 16 предлагает шарикоподшипники с предварительным натягом или металлокерамические подшипники, щетки из графита или драгоценных металлов, искрогашение (CLL) также является дополнительным. Этот широкий диапазон конфигураций является основой для многих приложений.
DCX 19 — это настоящее чудо конфигурации. Предварительно нагруженные шарикоподшипники или металлокерамические подшипники, щетки из графита или драгоценных металлов, с CLL и т. д. — широкий выбор опций делает его пригодным для широкого спектра применений.
DCX 22 — это настоящее чудо конфигурации. Предварительно нагруженные шарикоподшипники или спеченные подшипники, щетки из графита или драгоценных металлов, опционально с CLL, фильтром электромагнитных помех и т. д. — этот широкий выбор формирует основу для широкой области применения.
DCX 26 — мощная машина. Предварительно нагруженные шарикоподшипники или спеченные подшипники, щетки из графита или драгоценных металлов с CLL — широкий выбор опций делает его пригодным для широкого спектра применений.
DCX 32 имеет графитовые щетки и шарикоподшипники с предварительным натягом. Как и в случае со всеми двигателями DCX, механические и электрические интерфейсы можно конфигурировать.
DCX 35 — это электростанция с графитовыми щетками и предварительно нагруженными шарикоподшипниками. Как и в случае со всеми двигателями DCX, механические и электрические интерфейсы можно конфигурировать.
DC-max 16 — это небольшой привод с сильными магнитами RE, новейшей технологией намотки и оптимизированной по стоимости конструкцией, который изготавливается с использованием автоматизированных производственных процессов.
DC-max 22 — это небольшой привод с сильными магнитами RE, новейшей технологией обмотки и оптимизированной по стоимости конструкцией, изготовленный с использованием автоматизированных производственных процессов.
DC-max 26 — это небольшой привод с сильными магнитами RE, новейшей технологией обмотки и оптимизированной по стоимости конструкцией, который изготавливается с использованием автоматизированных производственных процессов.
ECX SPEED 4 доступен в двух вариантах длины с датчиком Холла, энкодером или без датчика и может комбинироваться с редукторами. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 6 M доступен с датчиками Холла, энкодером или без датчика и может комбинироваться с редукторами. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 8 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 13 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 16 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 19 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX SPEED 22 доступен с датчиками Холла, энкодером или без датчиков. Его можно комбинировать с редукторами, а электрическое соединение настраивается. Закажите привод ECX онлайн прямо сейчас.
ECX TORQUE 22 M доступен с датчиками Холла, встроенным энкодером или без датчика и может сочетаться с большим количеством редукторов. Механический интерфейс и электрическое соединение могут быть сконфигурированы. Закажите привод ECX онлайн прямо сейчас. №
Бесщеточные двигатели ECX SQUARE с обмоткой без сердечника отличаются экономичной конструкцией и идеально подходят для больших партий. Пластиковый корпус и обмотка внутри заливаются за одну операцию. В результате двигатели прочны, компактны и имеют длительный срок службы. 9№ 0003
Компактный бесщеточный двигатель EC-i в сочетании с высококачественным датчиком в прочном промышленном корпусе идеально подходит для решения задач, требующих высокой скорости и позиционирования. Этот двигатель также доступен в качестве привода со встроенным регулятором позиционирования и скорости.
Редукторы GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 6 обладает практически всеми качествами, которые могут требоваться от редуктора.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 8 обладает практически всеми качествами, которые могут требоваться от редуктора.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Высокие крутящий момент и скорость, низкий уровень шума и люфта… maxon GPX 10 обладает практически всеми качествами, которые могут требоваться от редуктора.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Использование металлических компонентов делает возможным широкий спектр применения.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Керамические компоненты редуктора делают его пригодным для применений, требующих превосходного крутящего момента и долговечности.
Редукторы maxon GPX сочетают чрезвычайно высокую передачу мощности с очень короткой конструкцией. Модульная конструкция обеспечивает основу для индивидуального решения заказчика. Керамические компоненты редуктора делают его пригодным для применений, требующих превосходного крутящего момента и долговечности.
Бесщеточный двигатель постоянного тока | Двигатели переменного тока
Бесщеточные двигатели постоянного тока были разработаны на основе обычных щеточных двигателей постоянного тока с использованием твердотельных силовых полупроводников. Итак, почему мы обсуждаем бесколлекторные двигатели постоянного тока в главе, посвященной двигателям переменного тока?
Бесщеточные двигатели постоянного тока аналогичны синхронным двигателям переменного тока. Основное отличие состоит в том, что синхронные двигатели развивают синусоидальную противоЭДС по сравнению с прямоугольной или трапециевидной противоЭДС для бесщеточных двигателей постоянного тока.
Оба имеют статор, создающий вращающиеся магнитные поля, создающие крутящий момент в магнитном роторе.
Синхронные двигатели обычно имеют мощность в несколько киловатт, часто с электромагнитными роторами. Истинные синхронные двигатели считаются односкоростными, кратными частоте сети. Бесщеточные двигатели постоянного тока, как правило, имеют небольшие размеры — от нескольких ватт до десятков ватт, с роторами на постоянных магнитах.
Скорость бесщеточного двигателя постоянного тока не является фиксированной, если только она не управляется фазированной замкнутой петлей, подчиненной опорной частоте. Тип конструкции либо цилиндрический, либо блинчатый.
Цилиндрическая конструкция: (а) внешний ротор, (б) внутренний ротор
Наиболее обычная конструкция, цилиндрическая, может принимать две формы (рис. выше). Наиболее распространен цилиндрический тип с ротором внутри, вверху справа. Этот тип двигателя используется в жестких дисках. Также можно поместить ротор снаружи вокруг статора.
Так обстоит дело с бесщеточными двигателями вентиляторов постоянного тока без вала. Этот стиль конструкции может быть коротким и толстым. Однако направление магнитного потока является радиальным по отношению к оси вращения.
Конструкция блинчатого двигателя: (a) одиночный статор, (b) двойной статор
Блинчатые двигатели с высоким крутящим моментом могут иметь обмотки статора с обеих сторон ротора (рис. b).
Применения с более низким крутящим моментом, такие как двигатели дисковода для гибких дисков, достаточно с катушкой статора на одной стороне ротора (рис. выше-a). Направление магнитного потока осевое, то есть параллельно оси вращения.
Функцию коммутации могут выполнять различные датчики положения вала: оптический энкодер, магнитный энкодер (резольвер, синхронизатор и т. п.) или магнитные датчики на эффекте Холла. В небольших недорогих двигателях используются датчики Холла.
Датчик на эффекте Холла представляет собой полупроводниковое устройство, в котором на поток электронов влияет магнитное поле, перпендикулярное направлению тока. Это похоже на сеть переменного резистора с четырьмя выводами. Напряжения на двух выходах дополняют друг друга.
Приложение магнитного поля к датчику вызывает небольшое изменение напряжения на выходе. Выход Холла может управлять компаратором, чтобы обеспечить более стабильное управление силовым устройством. Или он может управлять составным транзисторным каскадом при правильном смещении.
Более современные датчики на эффекте Холла могут содержать встроенный усилитель и цифровую схему. Это трехвыводное устройство может напрямую управлять силовым транзистором, питающим фазную обмотку. Датчик должен быть установлен близко к ротору с постоянными магнитами, чтобы определять его положение.
Датчики Холла коммутируют 3-фазный бесщеточный двигатель постоянного тока
Простой цилиндрический 3-фазный двигатель (рисунок выше) коммутируется устройством Холла для каждой из трех фаз статора. Изменение положения ротора с постоянными магнитами воспринимается устройством Холла по мере изменения полярности проходящего полюса ротора.
Этот сигнал Холла усиливается, так что обмотки статора управляются соответствующим током. Не показанные здесь сигналы Холла могут обрабатываться с помощью комбинаторной логики для получения более эффективных форм сигналов возбуждения.
Приведенный выше цилиндрический двигатель мог бы управлять жестким диском, если бы он был оснащен фазированной схемой автоподстройки частоты (PLL) для поддержания постоянной скорости. Аналогичная схема может управлять мотором дисковода блинов (рисунок ниже). Опять же, для поддержания постоянной скорости потребуется PLL.
Бесщеточный лопастной двигатель
3-φ лопастной двигатель имеет 6 полюсов статора и 8 полюсов ротора. Ротор представляет собой намагниченное плоское ферритовое кольцо с восемью аксиально намагниченными чередующимися полюсами. Мы не показываем, что ротор закрыт пластиной из мягкой стали для крепления к подшипнику в середине статора.
Стальная пластина также помогает завершить магнитную цепь. Полюса статора также установлены на стальной пластине, помогая замкнуть магнитную цепь.
Плоские катушки статора имеют трапециевидную форму для более плотного прилегания к катушкам и приближения к полюсам ротора. Катушки с 6 статорами состоят из трех фаз обмотки.
Если бы три фазы статора были последовательно запитаны, возникло бы вращающееся магнитное поле.
Ротор с постоянными магнитами следует, как и в случае с синхронным двигателем. Двухполюсный ротор будет следовать за этим полем с той же скоростью вращения, что и вращающееся поле. Однако наш 8-полюсный ротор будет вращаться с дольной скоростью из-за дополнительных полюсов в роторе.
Бесщеточный двигатель вентилятора постоянного тока имеет следующие характеристики:
Целью бесщеточного двигателя вентилятора является минимизация производственных затрат. Это является стимулом для перемещения продуктов с более низкими характеристиками с конфигурации 3-φ на конфигурацию 2-φ. В зависимости от того, как он управляется, его можно назвать 4-φ двигателем.
Вы, наверное, помните, что обычные двигатели постоянного тока не могут иметь четное число полюсов якоря (2, 4 и т. д.), если они должны быть самозапускающимися, 3, 5, 7 являются общими. Таким образом, гипотетический 4-полюсный двигатель может останавливаться при минимальном крутящем моменте, когда его нельзя запустить из состояния покоя.
Добавление четырех небольших выступающих полюсов без обмоток приводит к наложению пульсирующего крутящего момента на кривую зависимости крутящего момента от положения. Когда этот пульсирующий крутящий момент добавляется к нормальной кривой крутящего момента под напряжением, в результате минимальные значения крутящего момента частично удаляются.
Позволяет запускать двигатель во всех возможных положениях остановки. Добавление восьми полюсов постоянного магнита к обычному 4-полюсному ротору с постоянными магнитами накладывает небольшой пульсирующий момент второй гармоники на нормальный 4-полюсный пульсирующий момент.
Это дополнительно удаляет минимумы крутящего момента. Пока минимумы крутящего момента не упадут до нуля, мы сможем запустить двигатель. Чем успешнее мы устраняем минимумы крутящего момента, тем легче запускается двигатель.
Статор 2-φ требует, чтобы датчики Холла были разнесены на 90 ° электрических. Если бы ротор был двухполюсным, датчики Холла были бы размещены на 90 ° физ. Поскольку у нас есть 4-полюсный ротор с постоянными магнитами, датчики должны быть размещены 45 ° физический для достижения электрического расстояния 90 ° .