Содержание
Асинхронный двигатель, его плюсы и минусы
Основными потребителями мировой электроэнергии (более 60% — 65%) являются электромеханические системы — электроприводы, работающие в различных промышленных, транспортных и бытовых механизмах и агрегатах. Асинхронный двигатель является наиболее широко применяемым среди всех типов электродвигателей. Двигатели специальной конструкции, построенные на базе асинхронного двигателя, характеризуются техническими параметрами, влияющими на их рабочие характеристики и адаптирующими их к различным требованиям и назначениям. Среди асинхронных двигателей специальной конструкции можно выделить следующие: многоскоростные двигатели — частота вращения двигателя изменяется изменением количества пар полюсов вращающегося магнитного поля; двигатели с короткозамкнутым ротором с повышенным пусковым моментом — используются для привода устройств с большим моментом инерции; моторы крановые — адаптированы к различным видам работ, используются для привода кранов и других подъемных устройств; двигатели с тормозом — используются в приводах, требующих быстрой остановки после рабочего цикла или после аварийного отключения питания; двигатели с повышенным скольжением — используются для привода механизмов с большой инерционностью, а также механизмов, работающих в повторно-кратковременном режиме; взрывозащищенные двигатели и т. д.
д.
В бытовых электроприборах применяются однофазные электродвигатели с рабочим напряжением 220 вольт. Очень часто таким двигателем является однофазный асинхронный двигатель с короткозамкнутым ротором.
Преимущества асинхронных электродвигателей
- Самым главным преимуществом асинхронного двигателя является то, что его конструкция довольно проста. По сравнению с электродвигателем постоянного тока, асинхронный электродвигатель не имеет щеток и поэтому требует минимального технического обслуживания. Не требуется замена щеток, и нет угольной пыли от этих самых щеток, которая быстро засоряет электродвигатель. По этой же причине стоимость двигателя довольно низкая.
- Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не требуются дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя.
 Необходимо обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет функционировать.
Необходимо обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет функционировать. - Работа двигателя не сильно зависит от состояния окружающей среды. Но и для экстремальных условий выпускается большое количество специализированных модификаций асинхронных электродвигателей.
- В двигателе нет искр из-за отсутствия щеток.
- Асинхронный двигатель — это высокоэффективная машина с КПД при полной нагрузке от 85 до 97 процентов.
 Необходимо обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет функционировать.
Необходимо обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет функционировать.
Недостатки асинхронных двигателей
- Регулировать скорость асинхронного двигателя очень сложно. Это связано с тем, что трехфазный асинхронный двигатель является двигателем с постоянной скоростью и для всего диапазона нагрузок изменение скорости двигателя очень мало. Существуют различные типы устройств, позволяющих регулировать скорость мотора, которые не только расширяют диапазон применения двигателя, но и экономят электроэнергию. Типичными примерами экономии энергии за счет замены нерегулируемых приводов на регулируемые являются такие механизмы, как: насосы — 25%, вентиляторы — 30%, компрессоры — 40% и центрифуги — 50%.
- Во время прямого пуска, который заключается в подаче на двигатель номинального напряжения номинальной частоты, возникают неблагоприятные условия, такие как высокое потребление тока и низкий пусковой момент.
- Высокая инерция ротора — двигатель может не справиться с началом вращения тяжелых приводных агрегатов.
 Типичными примерами экономии энергии за счет замены нерегулируемых приводов на регулируемые являются такие механизмы, как: насосы — 25%, вентиляторы — 30%, компрессоры — 40% и центрифуги — 50%.
Типичными примерами экономии энергии за счет замены нерегулируемых приводов на регулируемые являются такие механизмы, как: насосы — 25%, вентиляторы — 30%, компрессоры — 40% и центрифуги — 50%.
На данный момент существует множество механических и электронных устройств, повышающих эффективность электромоторов и позволяющих максимально нивелировать недостатки асинхронных электродвигателей.
Замена двигателей постоянного тока на асинхронные двигатели переменного тока
Промышленные двигатели постоянного тока начали выпускаться в 1860—1870 гг., чему предшествовал 30-летний период их разработки после фундаментальных открытий М. Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Фарадея (закона электромагнитной индукции и превращения электрической энергии в механическую).
Двигатели постоянного тока широко применяются и в наше время благодаря использованию современных тиристорных преобразователей, которые позволяют осуществлять регулирование скорости данных двигателей путем изменения напряжения на якоре или в обмотках возбуждения. Для расширения диапазона регулирования скорости используются различные сигналы обратной связи (напряжение на якоре, тахогенераторы и т.д.). Однако эксплуатация двигателей постоянного тока влечет за собой ряд значительных неудобств, связанных с конструктивными особенностями машин данного типа, а именно:
1. Сложность конструкции и, как результат, высокая цена
2. Наличие щеточно-коллекторного узла
3. Большая масса
4. Необходимость в периодическом обслуживании
Все эти недостатки требуют существенных затрат при покупке машин постоянного тока и их дальнейшей эксплуатации, а так же они могут значительно снизить надежность и точность систем в целом.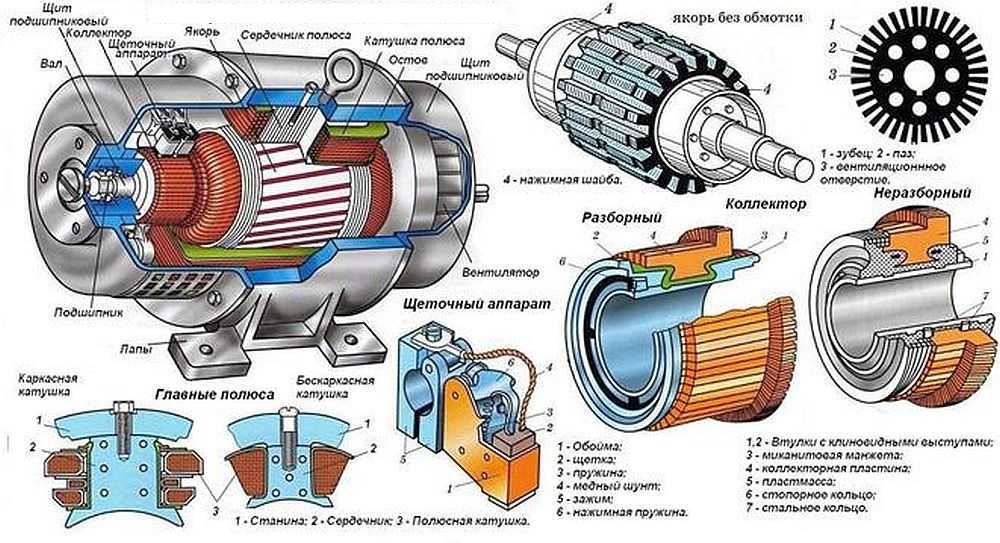 Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли.
Необходимо планировать дополнительные планово-предупредительные работы и останавливать производство для обслуживания щеточно-коллекторных узлов и проводить периодическую продувку машин от пыли.
До недавнего времени внедрение асинхронных двигателей (АД) с короткозамкнутыми роторами в системы, где требуется широкий диапазон регулирования скорости, не представлялось возможным, а для изменения скорости движения приводимых механизмов использовались переключаемые редукторы или вариаторы. Дальнейшим развитием таких систем стало появление асинхронных двигателей с переключением числа полюсов (двух и трех скоростные двигатели), что позволяло ступенчато изменять скорость вращения.
С развитием полупроводниковой электроники (разработка IGBT транзисторов), появилась возможность производства недорогих микропроцессорных преобразователей частоты, с помощью которых стало возможным полноценно управлять скоростью асинхронных двигателей в широком диапазоне регулирования (1:1000). Теперь частота вращения АД не зависит от частоты питающей сети, двигатели можно разгонять выше их номинальной скорости. Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока.
Так же появилась возможность управления моментом асинхронных двигателей. Системы управления движением с использованием асинхронных двигателей и преобразователей частоты, получаются дешевле и проще подобных систем с двигателями постоянного тока. В качестве датчиков обратной связи широко используются цифровые устройства (энкодеры), которые менее подвержены влиянию электромагнитных помех, чем тахогенераторы, классически используемые с машинами постоянного тока.
Асинхронный двигатель – простая, недорогая, не требующая обслуживания машина. Именно эти аргументы привели к тому, что на многих предприятиях машины постоянного тока с тиристорными преобразователями стали заменять на асинхронные двигатели с системами управления, построенными на преобразователях частоты.
При подборе асинхронного двигателя взамен машины постоянного тока необходимо учитывать разность характеристик этих машин. Подбор двигателя осуществляется по следующим параметрам:
1. По номинальной скорости вращения
Диапазон изменения частоты вращения вала асинхронного двигателя должен быть равен или больше чем у двигателя постоянного тока.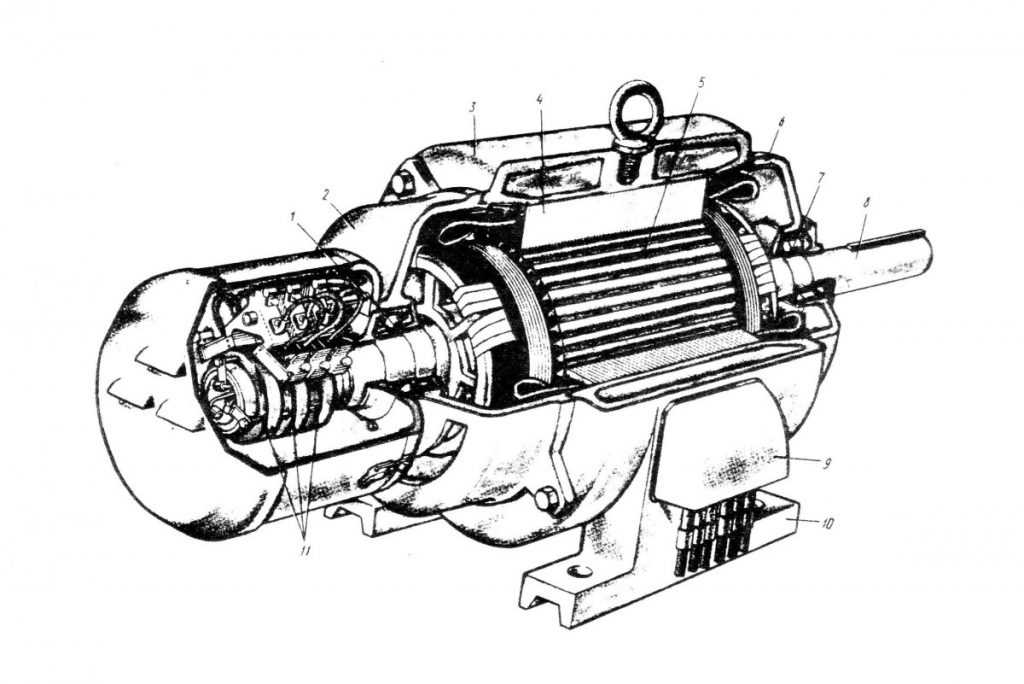
2. По моменту (номинальному, пусковому, максимальному)
Номинальный момент асинхронного двигателя должен быть равен или быть больше исходного при условии длительной работы в заданном диапазоне частот вращения без перегрева. Максимальный и пусковой моменты должны быть равны или быть больше пускового момента определенного для данного механизма.
На рисунке 1 и 2 представлены механические характеристики асинхронного двигателя и двигателя постоянного тока соответственно. Как видно, на малых скоростях асинхронный двигатель имеет момент значительно меньше номинального в отличие от двигателя постоянного тока. Поэтому при замене двигателя постоянного тока необходимо однозначно определить диапазон скорости вращения вала и требуемый момент в этом диапазоне. Как правило, для удовлетворения механических характеристик приводного механизма, приходится ставить асинхронный двигатель большей мощности.
Рис.1 Механическая характеристика асинхронного двигателя
Рис. 2 Механическая характеристика двигателя постоянного тока
2 Механическая характеристика двигателя постоянного тока
3. По режиму работы
Нагрев электрической машины зависит от режима ее работы, т.е. от соотношения длительности периодов работы и пауз между ними, или периодов работы с полной или частичной нагрузкой, от частоты включения машины и характера протекания переходных процессов.
Подразделяют следующие режимы работы:
Продолжительный режим (S1) — режим при котором время работы машины при практически неизменных нагрузке и температуре окружающей среды достаточно для нагрева всех ее частей до практически установившейся температуры. Режим характеризуется неизменными потерями в течение всего времени работы машины.
Кратковременный режим (S2) — режим при котором периоды неизменной нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз машина охлаждается до холодного состояния.
Повторно-кратковременный режим (S3-S8) — отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периодов отключения, причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Отличие между режимами S3-S8 заключается частотой пусков и продолжительностью включения машины.
4. По условиям эксплуатации
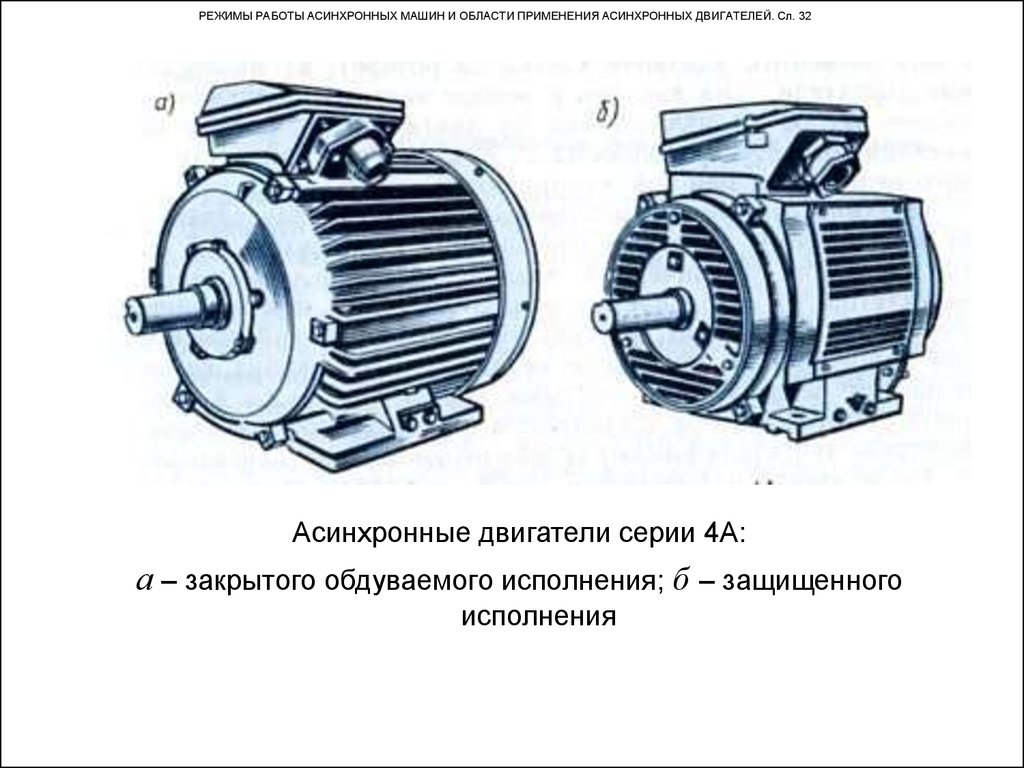
Согласно ГОСТ 17498-87 асинхронный двигатель должен иметь соответствующую степень защиты IPXX, где первый символ X означает степень защиты оболочкой, от проникновения инородных твердых тел, второй символ X означает степень защиты оболочкой от вредных воздействий проникающей воды. Например, IP54 — “Машина не полностью защищена от проникновения внутрь оболочки пыли (однако, пыль не может проникать в количестве, достаточном для нарушения работы изделия) и воды, разбрызгиваемой на оболочку в любом направлении”.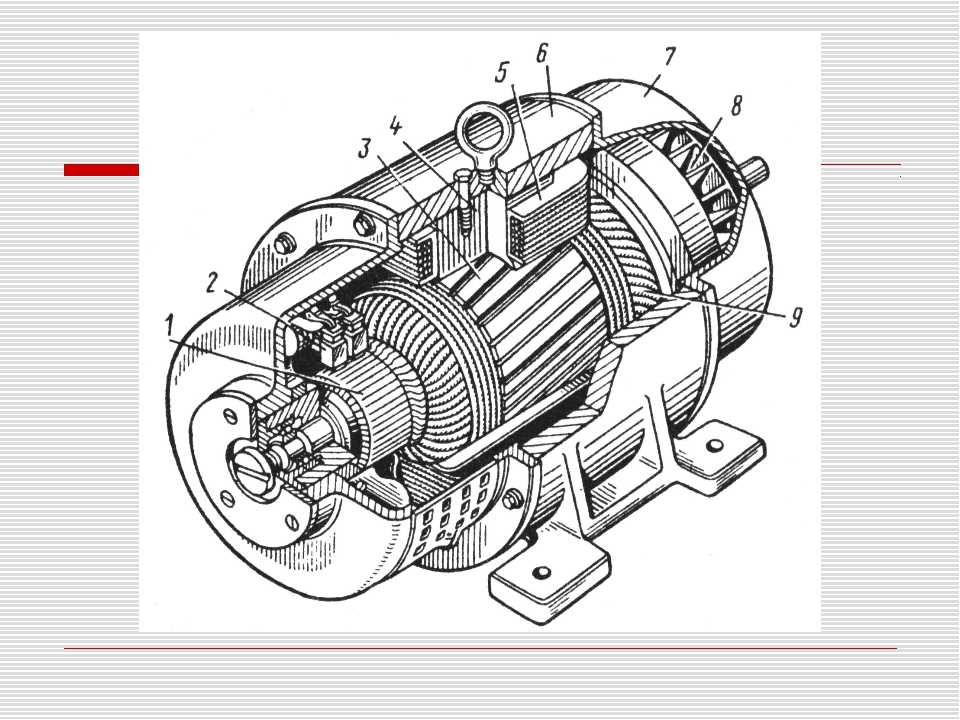
По всем вопросам, касательно данного применения обращайтесь в ООО «Драйвика» по тел. 8 (812) 635 90 30 или Email: [email protected]
В чем разница между двигателем переменного тока и двигателем постоянного тока? – Magnetic Innovations
В чем разница между двигателем переменного тока и двигателем постоянного тока?
Существует широкий выбор электродвигателей, подходящих для многих промышленных применений и оборудования. Инженеры и конструкторы имеют большой выбор при выборе двигателя для своего применения. В таблице ниже представлен обзор наиболее распространенных типов электродвигателей. Глобальная классификация электродвигателей делится в основном на две разные ветви: двигатели переменного тока и двигатели постоянного тока. В этой статье основное внимание будет уделено четырем различным подгруппам: асинхронные двигатели переменного тока, синхронные коллекторные двигатели постоянного тока (с коммутатором), Бесщеточные двигатели постоянного тока и синхронные двигатели переменного тока с постоянными магнитами (PMSM).
Асинхронный двигатель переменного тока
Синхронные коллекторные двигатели постоянного тока
Бесщеточные двигатели постоянного тока
Синхронные двигатели с постоянными магнитами (PMSM)
1. Асинхронный двигатель переменного тока
Асинхронные двигатели широко используются в качестве промышленных приводов. Статор асинхронного двигателя состоит из намотанных полюсов, которые могут быть подключены непосредственно к сети или через частотно-регулируемый привод. Переменный ток через эти полюса будет индуцировать магнитное поле в воздушном зазоре и роторе. Поскольку для этого типа двигателя используется переменный ток, часто, когда люди ссылаются на термин «двигатель переменного тока», они на самом деле имеют в виду асинхронный двигатель. Магнитное поле будет индуцировать вихревые токи в роторе примерно так же, как это делает трансформатор.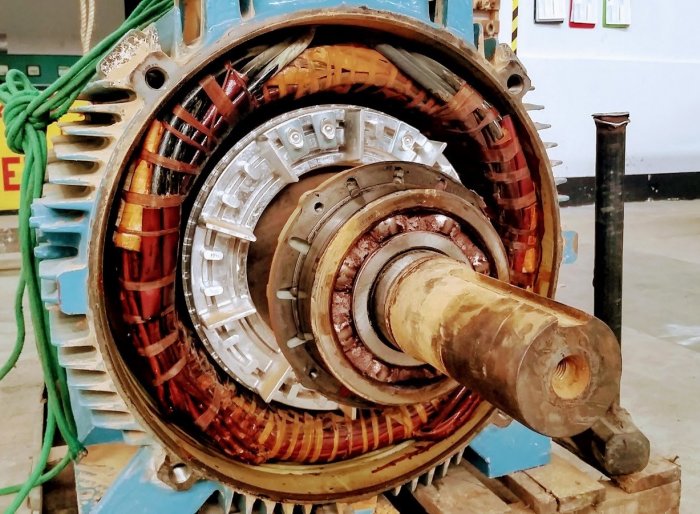 Эти индуцированные токи в роторе создают магнитное поле, которое генерирует крутящий момент.
Эти индуцированные токи в роторе создают магнитное поле, которое генерирует крутящий момент.
Беличьи клетки
Большинство асинхронных двигателей имеют короткозамкнутые роторы, называемые короткозамкнутыми роторами. Это причина другого прозвища асинхронного двигателя: «двигатель с короткозамкнутым ротором». В асинхронных двигателях НЕ используются постоянные магниты, только медная проволока и многослойная сталь. Клетка ротора в основном состоит из алюминиевых стержней, но в последние 10 лет для повышения эффективности используются и медные стержни.
Однофазные и трехфазные модели
Доступны однофазные и трехфазные модели. Трехфазные двигатели в основном предназначены для больших нагрузок, в то время как меньшие нагрузки часто приводятся в действие однофазными асинхронными двигателями. При прямом подключении к сети двигатель разгоняется до определенной фиксированной скорости, которая немного медленнее, чем частота вращения приложенного электрического поля (это явление называется скольжением). Это свойство является причиной того, что асинхронные двигатели также иногда называют асинхронными двигателями. Достигаемая скорость зависит от количества пар полюсов и применяемой электрической частоты. Нагрузка на вал лишь незначительно снизит скорость двигателя (порядка нескольких процентов).
Это свойство является причиной того, что асинхронные двигатели также иногда называют асинхронными двигателями. Достигаемая скорость зависит от количества пар полюсов и применяемой электрической частоты. Нагрузка на вал лишь незначительно снизит скорость двигателя (порядка нескольких процентов).
Изображение: ротор с короткозамкнутым ротором (источник)
Например: асинхронный двигатель с 2 парами полюсов, подключенный к сети 50 Гц, попытается развить скорость 1500 об/мин (=электрическая_частота*60 с/пар полюсов), но в зависимости от нагрузки он будет немного медленнее.
Эта постоянная скорость подходит для многих применений. Благодаря современной технологии электропривода теперь также можно достичь переменной скорости с помощью частотно-регулируемого привода (VFD). Поскольку изменяется электрическая частота (как упоминалось ранее), обороты вала в минуту также будут изменяться пропорционально. Внедрение частотно-регулируемого привода улучшило функциональность и энергоэффективность асинхронного двигателя.
Асинхронный двигатель переменного тока Преимущества и недостатки
Асинхронные двигатели имеют более низкий общий КПД и более низкую плотность крутящего момента по сравнению с двигателями с постоянными магнитами. Из-за отсутствия/отсутствия постоянных магнитов проще и проще применять ослабление поля, что обеспечивает большой диапазон оборотов для этих двигателей. Асинхронные двигатели широко распространены во многих промышленных и бытовых приложениях, где плотность крутящего момента и управляемость менее важны. Они самозапускающиеся, надежные и экономичные.
2. Синхронные коллекторные двигатели постоянного тока (с коммутатором)
Как следует из названия, коллекторные электродвигатели постоянного тока питаются от постоянного тока (DC). Двигатели имеют механическую коммутацию. В щеточных двигателях постоянного тока используются постоянные магниты или полюса статора с обмоткой. Полюса постоянного магнита или обмотки статора создают основное стационарное магнитное поле двигателя.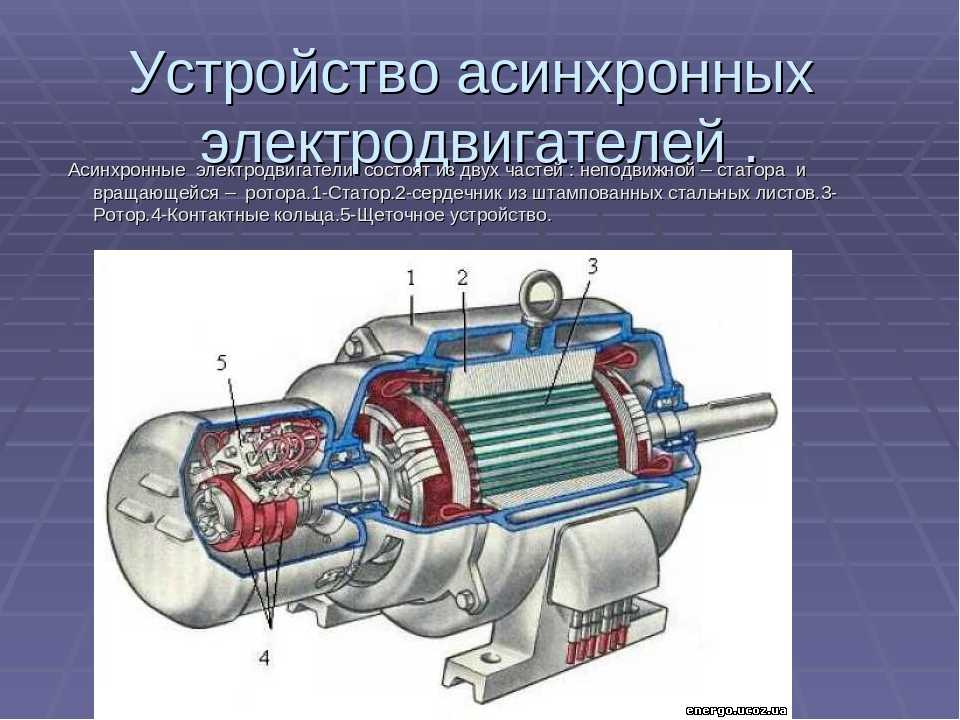
Ротор Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока имеют роторы с обмоткой, которые через коммутатор со щетками подключаются к источнику напряжения или тока. Когда полюса ротора пропускают ток, создается магнитное поле. Это поле ротора попытается выровняться с полем статора и, следовательно, создать крутящий момент. Характер тока в отдельных катушках ротора будет определяться коммутатором и щетками (рисунок).
Статор Коллекторные двигатели постоянного тока
Статоры щеточных двигателей постоянного тока изготавливаются с полюсами с обмоткой или с постоянными магнитами. На обмотки полюсов статора должно подаваться определенное напряжение/ток. Это создает дополнительную функцию управления и обеспечивает двигатель с определенными характеристиками момента/скорости. Типичными конфигурациями являются последовательная, шунтирующая и составная.
Коллекторный двигатель постоянного тока. Изображение предоставлено: ZGC Motor
Коллектор Коллекторные двигатели постоянного тока
Коммутатор действует как механический переключатель, поскольку он вызывает протекание тока через чередующиеся полюса ротора в зависимости от положения ротора.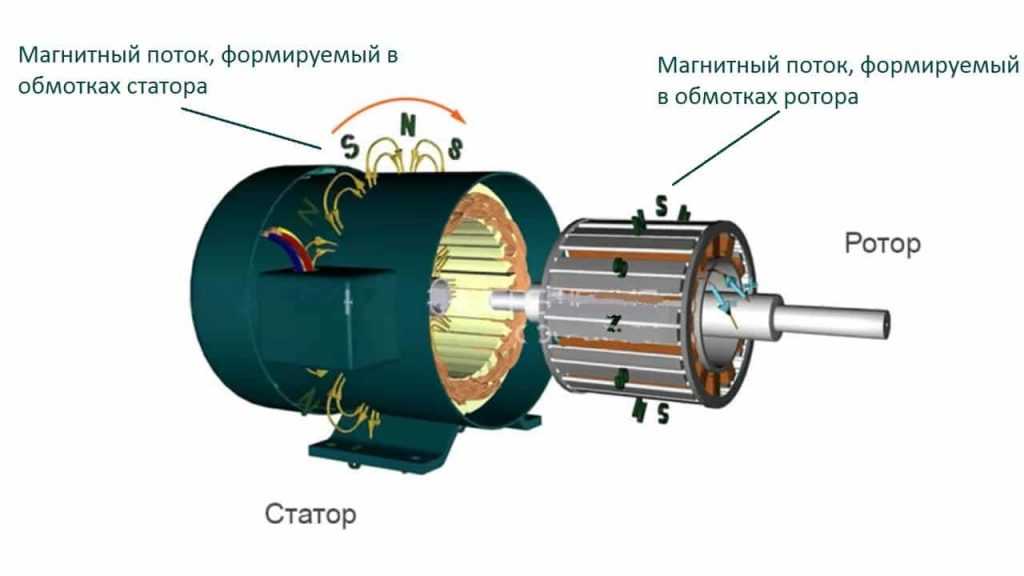 Это приводит к постоянному крутящему моменту на оборот. Щетки постоянно скользят по коллектору, что приводит к их износу. Это негативно влияет на срок службы и последовательность технического обслуживания коллекторного двигателя постоянного тока и является основным недостатком этого типа двигателя. Благодаря внедрению более сложной электроники (например, частотно-регулируемого привода) механическая коммутация поля ротора со щетками была преобразована в принцип электронной коммутации (т. е. бесщеточный постоянный ток).
Это приводит к постоянному крутящему моменту на оборот. Щетки постоянно скользят по коллектору, что приводит к их износу. Это негативно влияет на срок службы и последовательность технического обслуживания коллекторного двигателя постоянного тока и является основным недостатком этого типа двигателя. Благодаря внедрению более сложной электроники (например, частотно-регулируемого привода) механическая коммутация поля ротора со щетками была преобразована в принцип электронной коммутации (т. е. бесщеточный постоянный ток).
Управляемость щеточных двигателей постоянного тока
В первые дни, когда электроника широко не использовалась, эти типы двигателей часто использовались для различных целей. Простой управляемый источник постоянного напряжения может управлять двигателем. Более поздние опции, такие как управление током, системы обратной связи и ШИМ-приводы, облегчили еще более высокую управляемость коллекторных двигателей постоянного тока. Использование постоянных магнитов обеспечивает относительно высокую плотность крутящего момента и хороший КПД для двигателей этого типа.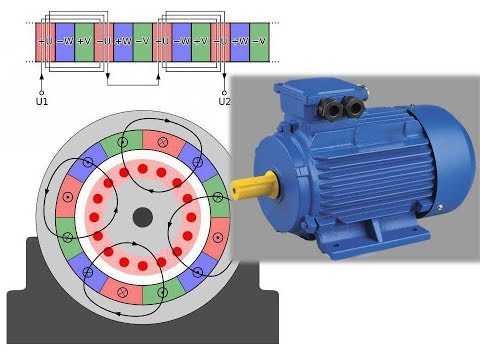
Преимущества и недостатки Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока имеют хорошие характеристики при запуске и регулировании скорости. Он имеет относительно высокую плотность крутящего момента. Диапазон регулирования скорости широкий, работает плавно. Электромагнитные помехи малы, а способность к перегрузке велика. Но конструкция щеточных двигателей постоянного тока является недостатком. Скользящий контакт между коллектором и щеткой вызывает искрение и механический износ. Из-за этого коллекторные двигатели постоянного тока имеют относительно короткий срок службы, проблемы с надежностью и высокие затраты на техническое обслуживание.
3. Бесщеточные двигатели постоянного тока (BLDC)
Как видно из названия, в бесщеточных двигателях постоянного тока щетки не используются. По сравнению с щеточными двигателями постоянного тока, в бесщеточных двигателях постоянного тока используется совершенно другой метод коммутации. Вместо щеток коммутация осуществляется электронным способом. Конструкция большинства бесколлекторных двигателей постоянного тока основана на статоре с витыми полюсами и многополюсном роторе с постоянными магнитами. Многополюсный ротор с постоянными магнитами проходит мимо статора с намотанными полюсами. Постоянные магниты ротора реагируют на изменяющееся магнитное поле статора. Статор неподвижен, подвижных проводов нет. Поэтому нет необходимости в токосъемных кольцах, коллекторах или щетках для бесщеточного двигателя постоянного тока.
Вместо щеток коммутация осуществляется электронным способом. Конструкция большинства бесколлекторных двигателей постоянного тока основана на статоре с витыми полюсами и многополюсном роторе с постоянными магнитами. Многополюсный ротор с постоянными магнитами проходит мимо статора с намотанными полюсами. Постоянные магниты ротора реагируют на изменяющееся магнитное поле статора. Статор неподвижен, подвижных проводов нет. Поэтому нет необходимости в токосъемных кольцах, коллекторах или щетках для бесщеточного двигателя постоянного тока.
Полюса статора – трехфазная система
Большую часть времени полюса статора наматываются в трехфазной конфигурации. Трехфазная система обмоток статора подключена к цепи электронных ключей (транзисторов, полевых транзисторов и т. д.). Схема включения питается постоянным напряжением или источником выпрямленного переменного напряжения. Простое переключение фаз вызывает токи прямоугольной формы/трапеции, поэтому обратная ЭДС бесщеточного двигателя постоянного тока также более или менее имеет форму прямоугольной волны/трапеции. Это вызывает увеличение пульсаций крутящего момента при работе этих двигателей. Более высокая скорость может быть достигнута за счет фазового продвижения. С использованием технологии VFD с бесщеточным двигателем стало возможным генерировать синусоидальный ток.
Это вызывает увеличение пульсаций крутящего момента при работе этих двигателей. Более высокая скорость может быть достигнута за счет фазового продвижения. С использованием технологии VFD с бесщеточным двигателем стало возможным генерировать синусоидальный ток.
Датчик
Для включения правильной фазы в нужный момент необходима система обратной связи. Датчики Холла могут быть установлены для определения положения ротора с постоянными магнитами относительно статора. Хотя чаще всего используются датчики Холла, существуют и более точные системы датчиков положения. С помощью вышеуказанной системы вращение двигателя может поддерживаться синхронно с приложенной электрической частотой.
Преимущества и недостатки Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока имеют много преимуществ по сравнению с щеточными двигателями постоянного тока, например, низкие затраты на техническое обслуживание, меньший уровень шума при работе, лучшие характеристики и более высокий КПД, меньшая электромагнитная совместимость. Они доступны в более компактных размерах и обеспечивают высокое соотношение крутящего момента к весу. Но по сравнению с другими двигателями бесщеточные двигатели постоянного тока также имеют несколько недостатков. Стоимость двигателя и электронного контроллера сравнительно выше. Пульсации крутящего момента, как упоминалось ранее. Кроме того, они немного сложнее.
Они доступны в более компактных размерах и обеспечивают высокое соотношение крутящего момента к весу. Но по сравнению с другими двигателями бесщеточные двигатели постоянного тока также имеют несколько недостатков. Стоимость двигателя и электронного контроллера сравнительно выше. Пульсации крутящего момента, как упоминалось ранее. Кроме того, они немного сложнее.
Изображение предоставлено: Microchip Technology Inc.
4. Двигатели переменного тока с постоянной синхронной синусоидой (PMSM)
Такие термины, как двигатель переменного тока PMSM, бесщеточный двигатель переменного тока или двигатель EC (электрическая коммутация), также часто используются для этого типа двигателя. Принцип работы этого двигателя заключается в статорной части, которая содержит трехфазную систему обмотки и конструкцию ротора с многополюсным массивом постоянных магнитов. Эти двигатели с высокой удельной мощностью очень эффективны и соответствуют классам энергоэффективности IE4 и даже IE5. Существуют различные конструкции синхронного синусоидального двигателя переменного тока с постоянными магнитами, например, с внутренними направляющими, внешними направляющими, двигателем с осевым потоком, поперечным двигателем и т. д.
Существуют различные конструкции синхронного синусоидального двигателя переменного тока с постоянными магнитами, например, с внутренними направляющими, внешними направляющими, двигателем с осевым потоком, поперечным двигателем и т. д.
Синусоидальный ток
Благодаря магнитной конструкции обратная ЭДС является синусоидальной, в сочетании с синусоидальным током может быть создан плавный крутящий момент. Для получения синусоидального тока необходим относительно сложный привод, такой как усилитель мощности или частотно-регулируемый привод. Эти типы дисков становятся все более и более стандартными и более простыми в использовании. Двигатель переменного тока с постоянным магнитом также работает синхронно с приложенной электрической частотой (деленной на количество пар полюсов).
Потери в железе
Использование сильных постоянных магнитов приводит к постоянным потерям в железе в пакете пластин во время вращения. Эти потери в железе ограничивают максимальную скорость двигателя, как и более высокое напряжение, необходимое для более высокой скорости (в основном ограниченное приложенным напряжением 400 В переменного тока_среднеквадратичное значение). Эти параметры необходимо учитывать. Для всех вышеперечисленных типов двигателей подаваемый ток вызывает потери на рассеяние в катушках. Эти потери должны быть термически обработаны в конструкции. Это также требует хорошей тепловой конструкции, потому что чем лучше тепловая конструкция, тем выше плотность крутящего момента. Поскольку большая мощность может подаваться и рассеиваться без перегрева двигателя.
Эти параметры необходимо учитывать. Для всех вышеперечисленных типов двигателей подаваемый ток вызывает потери на рассеяние в катушках. Эти потери должны быть термически обработаны в конструкции. Это также требует хорошей тепловой конструкции, потому что чем лучше тепловая конструкция, тем выше плотность крутящего момента. Поскольку большая мощность может подаваться и рассеиваться без перегрева двигателя.
Магниты ротора для поверхностного и внутреннего монтажа (источник)
Высокая плотность крутящего момента
Сочетание высокопрочных постоянных магнитов с превосходной магнитной конструкцией позволяет получить двигатель PMSM с очень высокой плотностью крутящего момента. Например, двигатель переменного тока с постоянным магнитным полем массой 20 кг (44 фунта), включая корпус и подшипник, может обеспечить сравнимую выходную мощность/крутящий момент по сравнению с асинхронным двигателем переменного тока массой 55 кг (121 фунт). На основе стандартных/пассивных методов охлаждения для обоих. Для двигателей переменного тока с постоянными магнитами требуется непрерывная обратная связь по положению либо с помощью датчиков, либо сегодня возможно даже бездатчиковое управление. Для увеличения скоростных возможностей некоторые конструкции двигателей переменного тока с СДПМ имеют возможность ослабления поля.
Для двигателей переменного тока с постоянными магнитами требуется непрерывная обратная связь по положению либо с помощью датчиков, либо сегодня возможно даже бездатчиковое управление. Для увеличения скоростных возможностей некоторые конструкции двигателей переменного тока с СДПМ имеют возможность ослабления поля.
Рост использования Электродвигатели переменного тока с постоянными магнитами
Технология двигателей переменного тока с постоянными магнитами в сочетании с электроприводами, обеспечивающими электронную коммутацию, доступна уже некоторое время. Но по мере того, как приводы двигателей, поддерживающие двигатели PMSM, становятся все более доступными, все больше компаний начинают интегрировать двигатели переменного тока с постоянными магнитами в свои приложения. Использование значительно увеличивается. Это связано с компактной конструкцией, высокой плотностью крутящего момента, высокой эффективностью и длительным ожидаемым сроком службы. Двигатель переменного тока PMSM дает компаниям возможность создавать приложения меньшего размера, работающие более эффективно, с большей управляемостью, с повышенной надежностью и, как таковые, с более низкими (эксплуатационными) затратами.
Преимущества и недостатки двигателей переменного тока с постоянными магнитами
Хотя для двигателей переменного тока с постоянными магнитами всегда требуется привод, и они, как правило, немного дороже по сравнению с асинхронными двигателями переменного тока, они часто являются лучшей альтернативой. Они имеют более высокую плотность крутящего момента, намного более эффективны, значительно меньше и легче, чем сопоставимые асинхронные двигатели.
Узнайте больше о различных двигателях
Существует широкий выбор двигателей, подходящих для многих промышленных применений и оборудования. У инженеров и конструкторов есть большой выбор при выборе двигателя для их применения. Подробнее о других моторах вы можете прочитать на нашем сайте:
Свяжитесь с нами для получения дополнительной информации
Серия стандартных двигателей с прямым приводом компании Magnetic Innovations
Лаборатория автомобильной электроники Clemson: Асинхронные двигатели переменного тока
Асинхронные двигатели переменного тока
|
 В отличие от двигателей, работающих непосредственно от постоянного тока,
В отличие от двигателей, работающих непосредственно от постоянного тока,
