Содержание
Как подключить шаговый двигатель от дисковода к ардуино
Содержание
- Подключение шагового двигателя к Ардуино
- Принцип работы шагового двигателя
- Драйвер шагового двигателя Ардуино
- Как подключить шаговый двигатель к Ардуино
- БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
- БИБЛИОТЕКА GYVERSTEPPER
- ДОКУМЕНТАЦИЯ
- Документация
- Инициализация
- Время шага [NEW!]
- Медленные скорости (new!)
- Тик и тайминги
- Смена направления
- Режимы работы
- Режим FOLLOW_POS
- Режим KEEP_SPEED
- Алгоритм планировщика скорости
- Остановка и сброс
- Управление питанием
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Шаговый двигатель – принцип работы
- Где купить шаговый двигатель
- Драйвер для управления шаговым двигателем
- Драйвер шагового двигателя на базе L298N
- Драйвер шагового двигателя ULN2003
- Другие драйвера
- Подключение шагового двигателя к Ардуино
- Обзор основных моделей шаговых двигателей для ардуино
- Описание библиотеки для работы с шаговым двигателем
- Пример скетча для управления
- Заключение
- Arduino.
 ru
ru - Управление шаговым двигателем CD-привода
- Видео
 ru
ruПодключение шагового двигателя к Ардуино
Шаговый двигатель 28byj-48 Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим управление шаговым двигателем от Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°.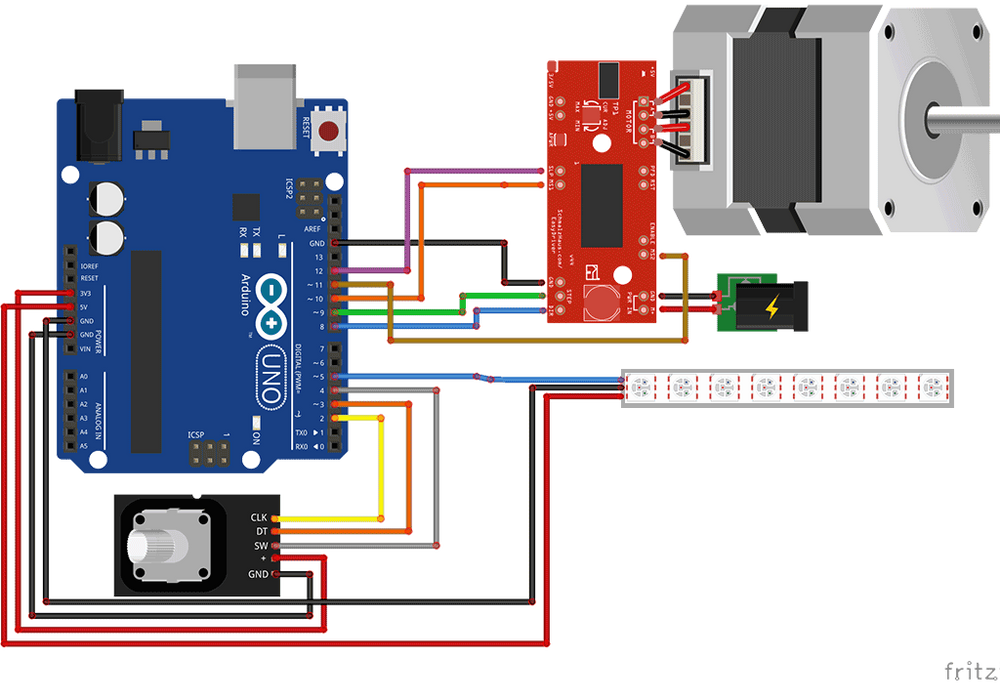 Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото.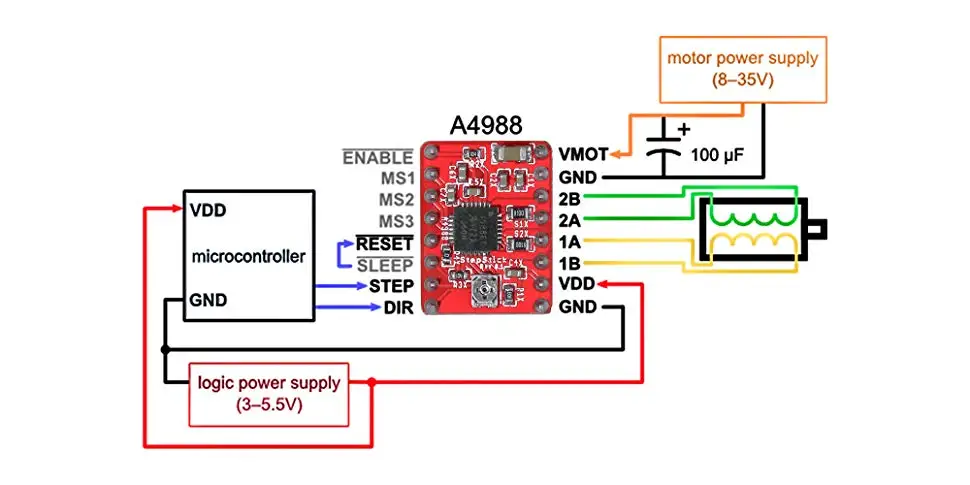 Виды драйверов для управления шаговым двигателем
Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
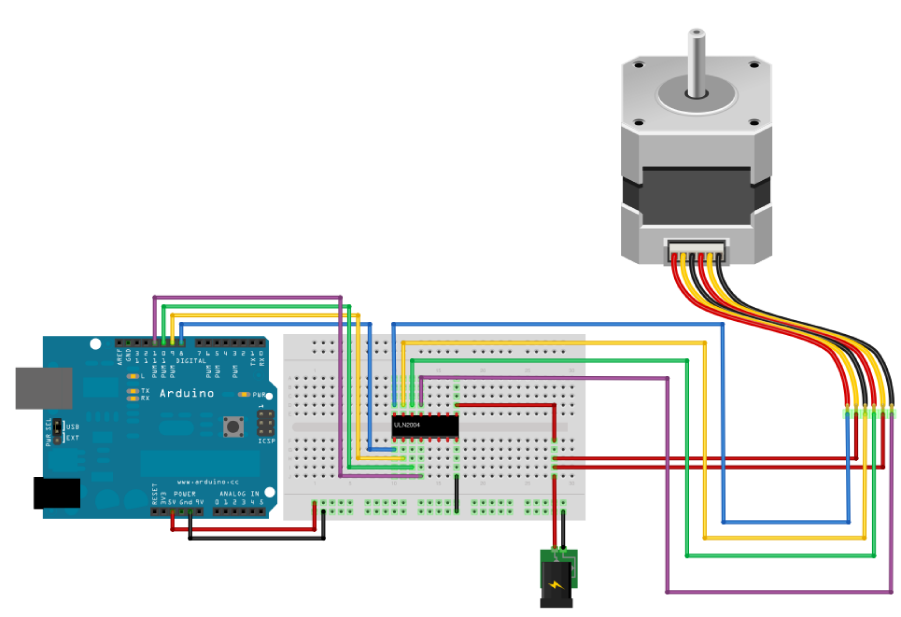
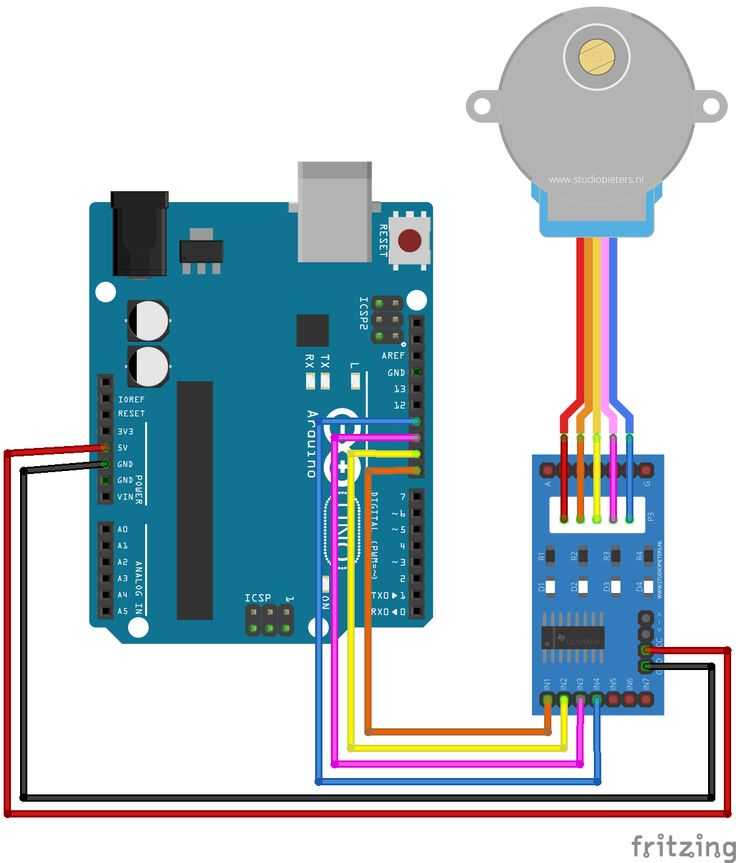
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия нам потребуется:
Источник
БИБЛИОТЕКА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ ARDUINO
Для подключения шаговых моторов к Arduino нужно использовать драйверы.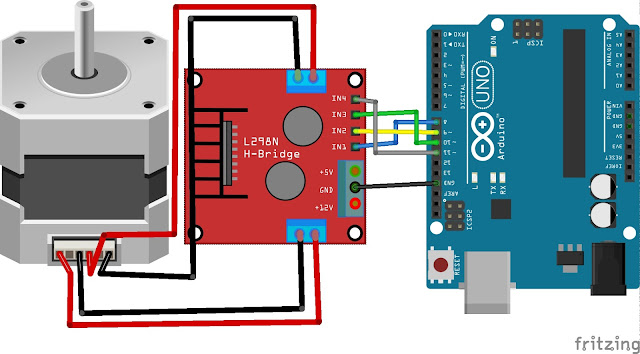 Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
Очень дешёвые и популярные моторы 28byj-48-5v часто продаются вместе со своим драйвером (транзисторная сборка ULN2003), подключить можно к любым 4-м пинам Ардуино и использовать.
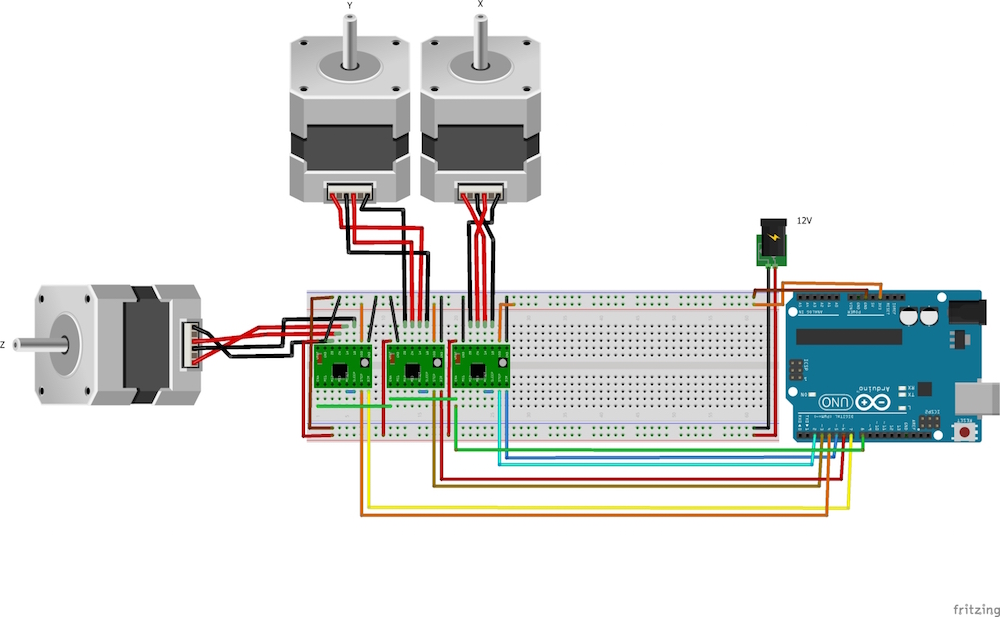
Для работы с большими шаговиками (типа Nema 17) нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A4988, DRV8825 и TMC2208, драйверы такого формата подключаются и работают практически одинаково, т.к. разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате. Это можно сделать “на глаз”, заставив мотор вращаться и регулируя крутилку. Мотор должен вращаться, но не вибрировать как перфоратор и сильно не нагреваться. Лучше настроить ток по опорному напряжению Vref, у каждого драйвера оно считается по своей формуле (см. картинки ниже). Берём ток своего мотора из описания, подставляем в формулу вместо current, считаем, и накручиваем полученное напряжение крутилкой. Для измерения опорного напряжения нужно подключить щупы вольтметра к самой крутилке и пину GND.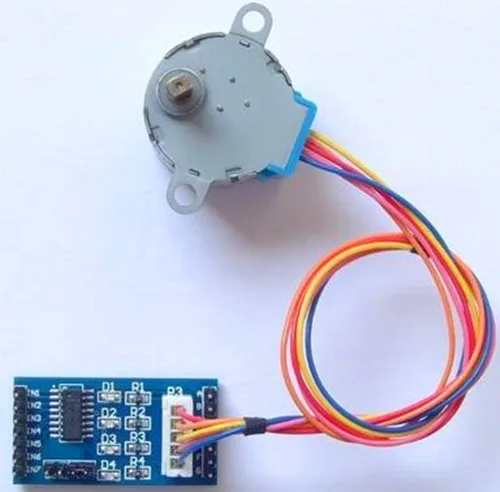
Главное преимущество дорогущих драйверов TMC – отсутствие шума/свиста/вибраций при работе, так как драйвер своими силами интерполирует сигнал до микрошага 1/256.
БИБЛИОТЕКА GYVERSTEPPER
GyverStepper v1.8
GyverStepper – производительная библиотека для управления шаговыми моторами
Поддерживаемые платформы: все Arduino (используются стандартные Wiring-функции)
Версия 1.1: добавлена возможность плавно менять скорость в режиме KEEP_SPEED. Добавлены примеры multiStepper и accelDeccelButton
v1.2 – добавлена поддержка ESP8266
v1.3 – изменена логика работы setTarget(, RELATIVE)
v1.4 – добавлена задержка для STEP, настроить можно дефайном DRIVER_STEP_TIME
v1.5 – пофикшен баг для плат есп
v1.6 – Исправлена остановка для STEPPER4WIRE_HALF, скорость можно задавать во float (для медленных скоростей)
ДОКУМЕНТАЦИЯ
Документация
Инициализация
Библиотека поддерживает два типа драйверов:
При инициализации указывается тип драйвера, количество шагов на оборот и пины:
Количество шагов на оборот нужно для работы функций, которые устанавливают или читают параметр в градусах.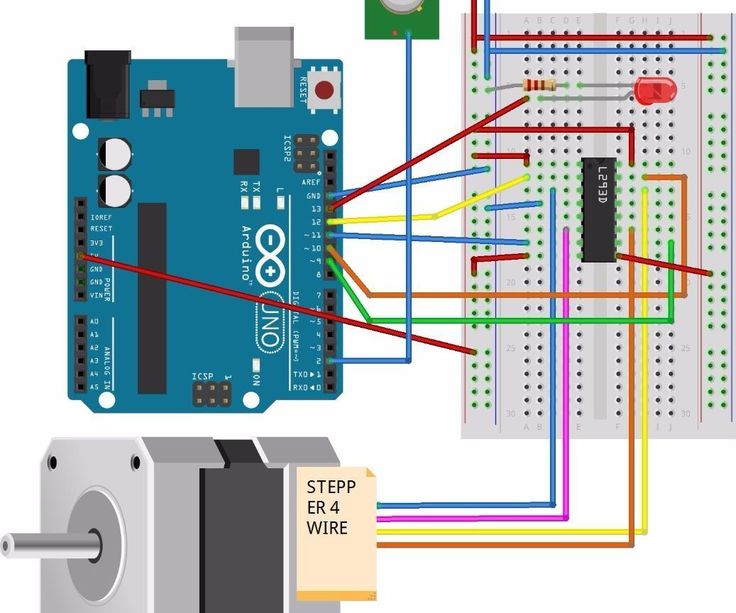 Если они не нужны – количество шагов можно поставить любое (единичку). Если нужно – количество шагов нужно указывать с учётом редукторов и микрошагов:
Если они не нужны – количество шагов можно поставить любое (единичку). Если нужно – количество шагов нужно указывать с учётом редукторов и микрошагов:
Время шага [NEW!]
Для драйверов STEP-DIR сделана задержка между переключением состояния пина STEP, эта задержка является минимальной, т.е. она может быть больше, чем нужно, но если будет меньше – возможна нестабильная работа драйвера. По умолчанию она составляет 4 микросекунды, но разным драйверам она нужна разная (для других драйверов см. даташит):
Также увеличение задержки может повысить стабильность работы при использовании длинных неэкранированных проводов от микроконтроллера к драйверу (к пину STEP).
Для изменения величины задержки сделай дефайн DRIVER_STEP_TIME перед подключением библиотеки:
Медленные скорости (new!)
Тик и тайминги
Смена направления
Режимы работы
Режим FOLLOW_POS
В этом режиме мотор следует на указанную позицию в шагах или градусах. Для её установки есть следующие методы:
Для её установки есть следующие методы:
Примечание: абсолютная позиция – говоришь мотору повернуться на 300 шагов, он повернётся на позицию 300. При повторном вызове ничего не произойдёт. Относительная – говоришь повернуться на 300 – он повернётся на 300 относительно текущей позиции. Если вызвать ещё раз через некоторое время – цель сместится относительно текущей позиции вала.
Установленную целевую позицию можно прочитать:
Дополнительно можно настроить максимальную скорость и ускорение при движении к целевой позиции:
Также можно вручную установить текущую позицию мотора в шагах и градусах при помощи:
Режим KEEP_SPEED
В этом режиме мотор просто крутится с заданной скоростью. Скорость задаётся при помощи
(New!) Вторым аргументом можно передать включение плавного изменения скорости, по умолчанию стоит false ( NO_SMOOTH ). Смотри пример accelDeccelButton
Установленную скорость можно прочитать:
Алгоритм планировщика скорости
В библиотеке реализовано два алгоритма планирования скорости для режима плавного движения к позиции с ненулевым ускорением:
Остановка и сброс
Управление питанием
Источник
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале.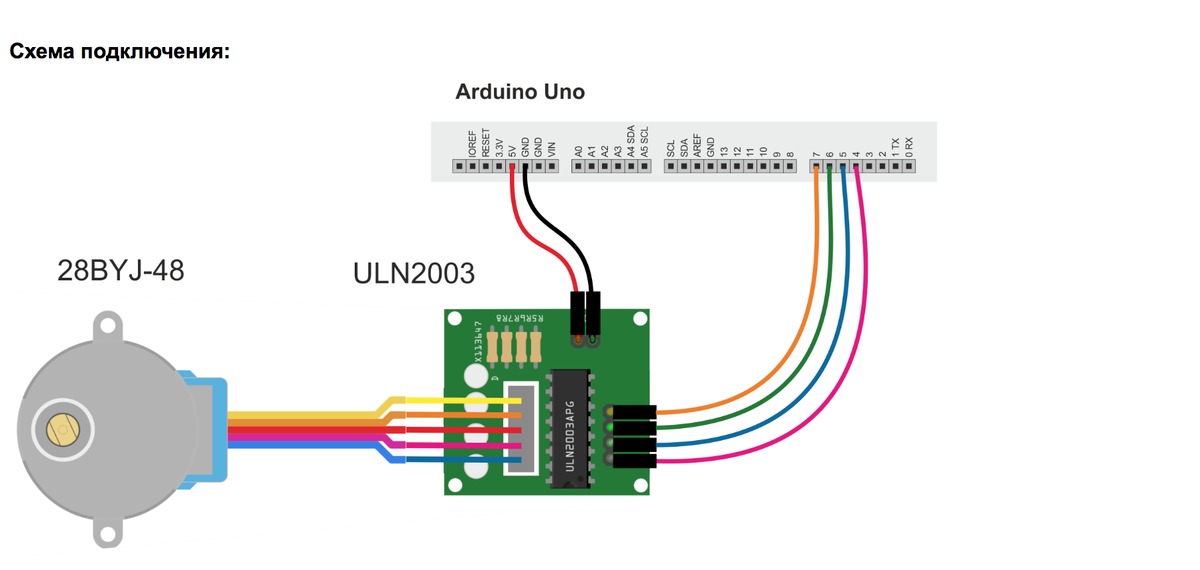 Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.
Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
В STEP/DIR драйверах используется 3 сигнала:
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
Подключение шагового двигателя к Ардуино на базе L298
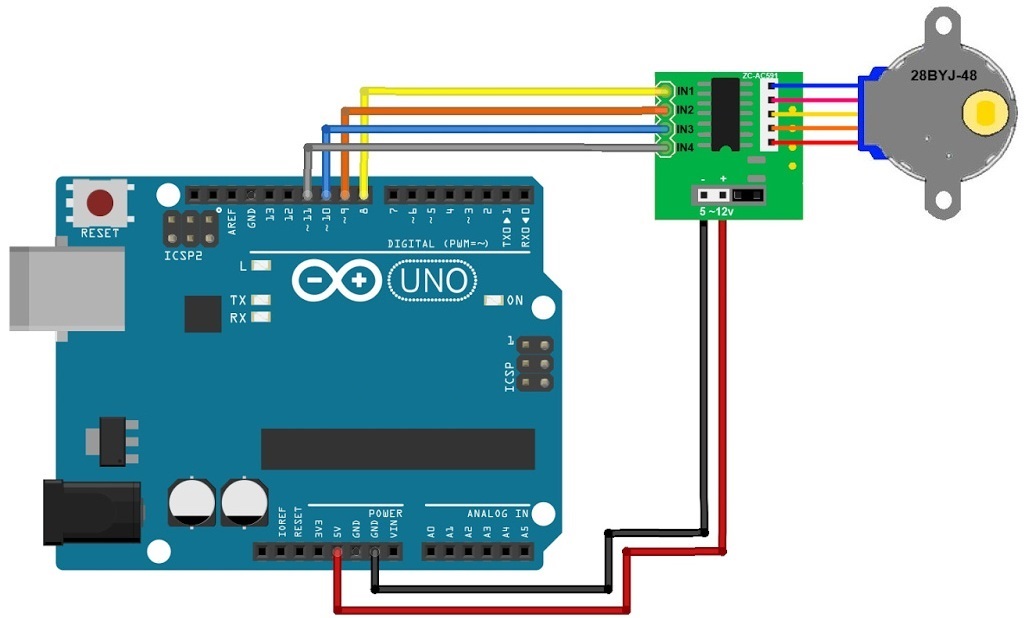
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В.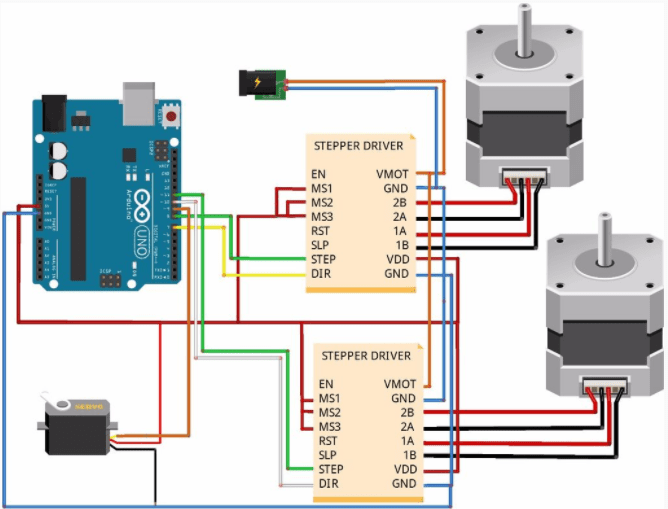 Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
Принципиальная схема подключения шагового двигателя
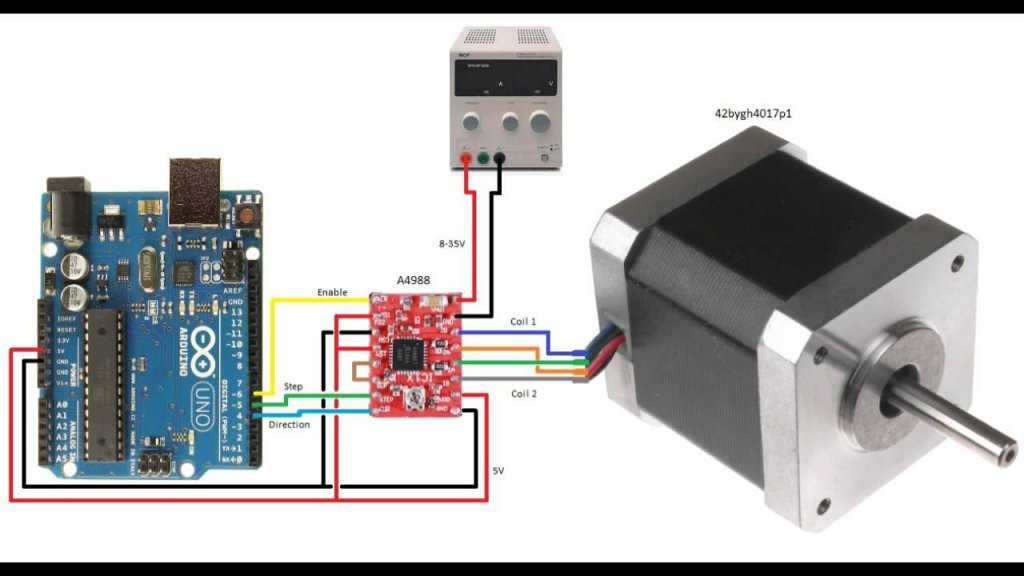
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.
Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.
Основные характеристики двигателя:
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.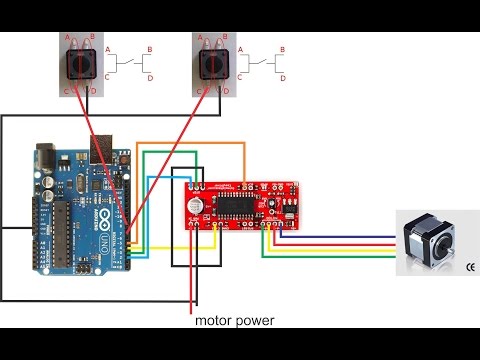 h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Источник
Arduino.ru
Управление шаговым двигателем CD-привода
Здравствуйте, есть вопрос к опытным ардуинщикам.
Когда я начал осваивать ардуино, то сразу же приобрел для знакомства шаговый мотор с «драйвером» на ULN2003. Вопрос в том, можно ли подключить к биполярному шаговому двигателю из CD-привода ардуино через этот «драйвер»? Если да, то подскажите, пожалуйста, как.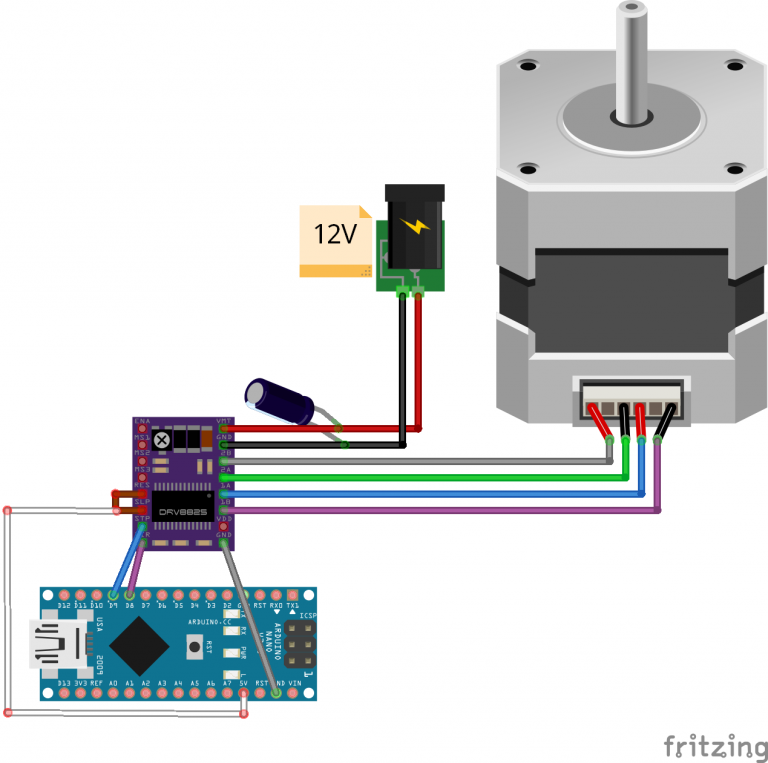
Не выйдет на ULN2003, она умеет только ключами землю подавать униполярному (с общим соединением обмоток)
а у вас биполярник- две раздельные обмотки, нужен мост и защита от сквозных токов.
Не выйдет на ULN2003
Уважаемый, а почему не выйдет? Я подключаю через ULN2003 двигатель 28byj-48 5vDC. Дальше программно 1-2-3-4-1 и у меня все крутится. Я где накосячил?
Не выйдет на ULN2003
Уважаемый, а почему не выйдет? Я подключаю через ULN2003 двигатель 28byj-48 5vDC. Дальше программно 1-2-3-4-1 и у меня все крутится. Я где накосячил?
Вы сравниваете биполярник и униполярный двигатель. На Вашем вращение осуществляется поочередной подачей +5 на каждую ногу, а в CD/DVD поочередно меняются +5 и GND
У меня биполярный. Supereplosive пишет, что у него тоже биполярный. Раскажите, пожалуйста, чем отличается «подача поочередно +5 на каждую ногу» и «поочередно менять +5 и GND»? Я так понимаю у меня тоже меняется +5 и GND?
А Вас не смутило, что в приведенном PDF схема имеет 4 контакта (как на биполярном движке), а рисунок моторчика 5 (как на 28byj-48)?
Разница в том, что по 4 проводам, в вашем случае, поступает +5 вольт, по очереди, а 5-й идет на землю.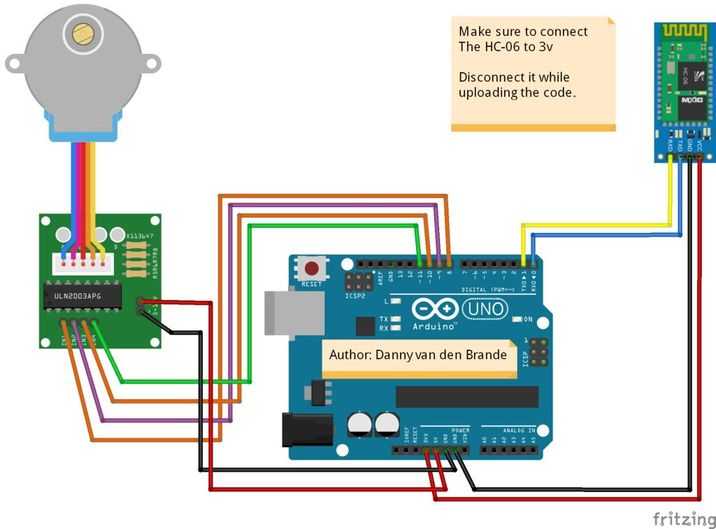 UNL2003 служит для того, чтобы превратить миллиамперы с вашей ардуины в амперы для вращения двигателя.
UNL2003 служит для того, чтобы превратить миллиамперы с вашей ардуины в амперы для вращения двигателя.
А вот для биполярного двигателя от CD/DVD нужен драйвер, который умеет как включать +5, так и землю.
Разница конкретно в следующем:
на 28byj-48 подаем на первый провод+5. потом на 2 и так по кругу.
на CD/DVD мы должны подать +5 на первый прово и GND на 2й. потом +5 на 3-й и GND на 4-й. Затем мы подаем GND на первый и +5 на второй. UNL2003 не может соединить с землей. Либо +5, либо ничего. Но не земля.
Прошу простить мою тупость, но прошу потратить пару минут и разъяснить.
В приведенном мной примере к БИПОЛЯРНОМУ двигателю 28byj-48 (я сделал вывод, что биполярный, так как на схеме приведенной в PDF нет связи между парами обмоток) подходит 5ть проводов. 5й провод передает на моторчик GND(имхо). Какая разница с БИПОЛЯРНЫМ двигателем из CD-DVD?
Схема неверна! На схеме биполярный двигатель (4 провода). На рисунке униполярный двигатель (5 проводов).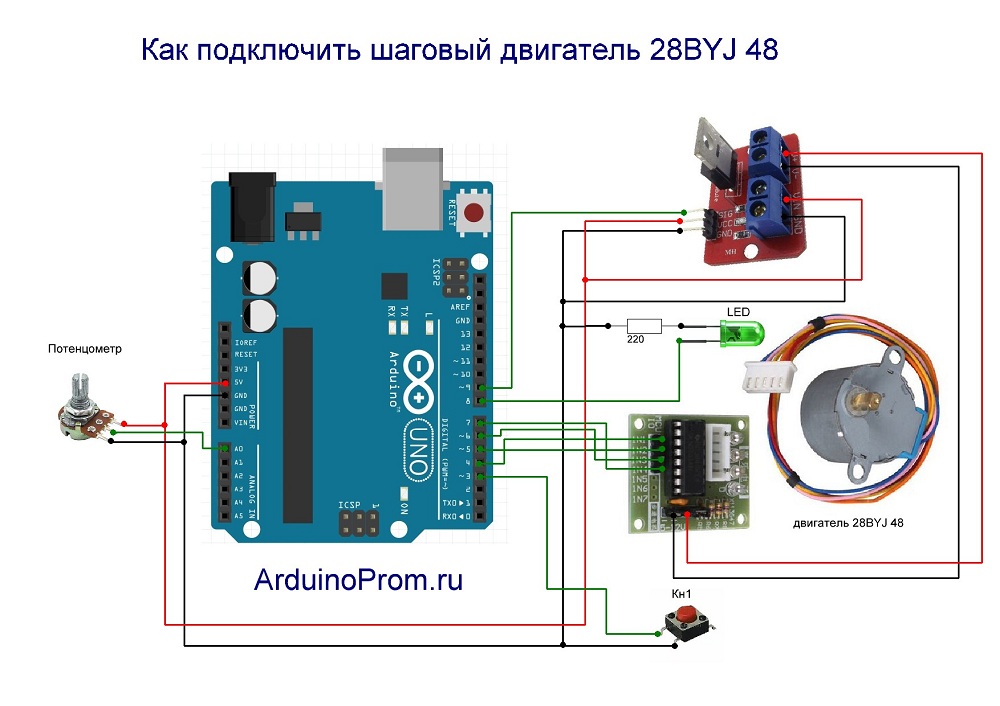 Вот правильная, для 28byj-48 схема.
Вот правильная, для 28byj-48 схема.
Чувствую, что вы правы, но не верить PDF’ке как-то сразу не получается. Т.е. получается, что ULN2003 подключает моторчик к +5? Т.е. у меня униполярный двигатель? Меня надули?
а может товарищу попробовать библиотеку Stepper.h, она прямо так работает:
Драйверы для биполярника, насколько я знаю, стоят дороже.
0 это 0. GND это GND
Для шаговика из DVD есть A4988 и аналоги
Вот тут работает на меге 2560 и l298.
Двигатель подключен к пинам 1В, 1А, 2А, 2В как на схеме у 4ishops
если фото вашей схемы, думаю что минимум это ваша проблема: 8.2-V to 45-V Operating Supply Voltage Range
Мой макет с двух ракурсов вот:
Здравствуйте, есть вопрос к опытным ардуинщикам.
Когда я начал осваивать ардуино, то сразу же приобрел для знакомства шаговый мотор с «драйвером» на ULN2003. Вопрос в том, можно ли подключить к биполярному шаговому двигателю из CD-привода ардуино через этот «драйвер»? Если да, то подскажите, пожалуйста, как.
Можно мои пять копеек.
Да все вы можете подсоединить как угодно. И дрыгаться будет мотор как угодно. Только воть чтоб дрыгался как хочется вам люди советуют для этой хрени скажем «биполярник» вам лучше всего прменить вот такую хрень «водитель мотора с выходом по принципу H-моста«. Смотрим на мио фото здесь на форуме. Вникаем изучаем. Чем я там развлекался СД-ромным.
Ищем тут по форуму мои исходники, что тут накидал. По словам водителей моторных 😉
На фото внизу пара ДВД-механик Пара ЛегкихДрайверов(A3957) Одна ведруинка Один светик. Там пара биполярных моторчиков уверенно шагающих начиная с 6.5 вольта.
ULN2003 это просто 6 ключиков тоже моторы дрыгаться будут. Но неудачно дрыгаются. На вкус и цвет товарища нет.
Мой макет с двух ракурсов вот:
а уже потом с кодом можно шаманить.
Добавлю: добрался до работы, вот ссылка, там все есть и схема для проверки работоспособности и скетч.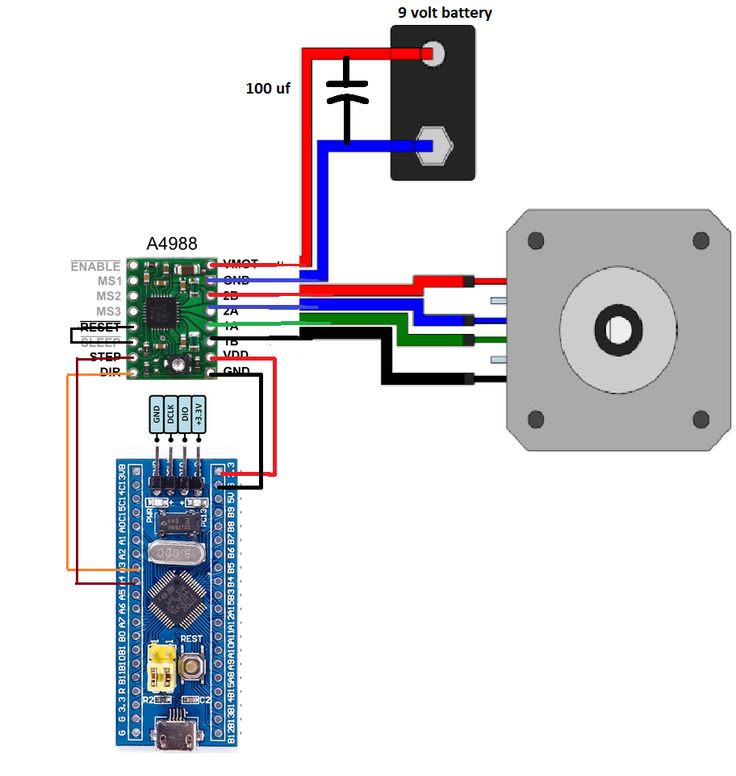 Я правда все лишнее выбрасывал, делал просто чередующееся в одну и потом в другую сторону вращение для поиграться.
Я правда все лишнее выбрасывал, делал просто чередующееся в одну и потом в другую сторону вращение для поиграться.
Мой макет с двух ракурсов вот:
а уже потом с кодом можно шаманить.
В правом нижнем углу питатель. На нем щупы от вольтметра красный черный. На питателе выход мимнимальный 6.5 вольта чтобы:
Моторам 5 вольт хватает. Драйверочкам моторов нет. Только с минимальных 6.5 вольта начинают ардуинку слушаться и управлять моторами. Так что деалайте что хотите но будьте готовы драйверочкам моторв дать побольше.
Двигатель подключен к пинам 1В, 1А, 2А, 2В как на схеме у 4ishops
Батенька вижу ваш драйверочек и не вижу
1 где питание минимум 8.5 вольт а проще 12 вольт?
2 где разрешение на подачу высокого напряжения (допустим 12 вольт) на катушки мотора. 1-ая нога ENABLE на землю по умолчанию?
Щас дальше посмотрю. Драйверок новомодный но подключение смотрю колассическое как у проверенного старичка А4988. Значит кроме отличия в максимальной микрошаганутости 1:16 1:32 различий нет.
3. SLEEP тоже к земле притянуть закоротить.
4. вообще принцип какой Все зделано так чтобы работать сутками без остановок поэтому спячкой и снятием высокого напряжения если не вы то микроконтроллер должен беречь в секунды простоя. По умолчанию земля кругом и все в землю затягивается. Кроме резета который уже затянуть в плюс слаботочного 5в питания. Радиаторчки не забудьте приклеить из комплекта. Потому как в таком режиме все Енабле и Спать в земплю мотор будет удерживатся током то есть греться. Отладить хватает. Пальцем щупайте контроллируйте нагрев.
Ваш леонардо должен иметь стабилизатор и прекрасно от 9 вольт работать. Ваш драйверочек 8855 тоже 9 вольт любить должен не перегреваясь. Вашему моторчику многовато 9 вольт но не сгорит. Поищите 9 вольт питание 500мА. Немного. Тютелька в тютельку. И не перегреется драаверок. Опасайте перепутки высокого напрячжения и низкого напряджения сгорит сразу без дыма и предупреждений. Этот тип драйверов никто не ремонтирует.Он так зделан чтобы просто заменять. Обычно я их не менее 5 штук за раз покупаю. Дешевые ведь.
Обычно я их не менее 5 штук за раз покупаю. Дешевые ведь.
Короче выкинте ту схему по которой собираете. Берите правильную. Для теста годится. В промышленном станке добавить только охлаждающие режимы.. Все свободные важные ногои в воздухе не болтаются. А вы смотрю желтым проводом типа охлаждение и резет накосячили и енабле высокого не разрешили. Тут автор может в земплю а может рулить нагревом в режиме простоя удержания сиреневым. А оранжевым из спячки слаботочку по любому вытянет потому как резет внутри уже в +5в подтянуты. И очень важный кандер от пробоя. Хотя народ думает это для сглаживания. Сглаживание да не то. Когда на мотором механика крутит. Мотор генерирует не балуй. А тут рядышком кандер сжирает импульсы иначе Н-мост сгорает только в путь. Защитных 8 штук мощных на 2 амера диодов нет. Внутренние конструктивные жидкие только на слабых моторах спасают или если механика не крутит моторм. Ваш случай. Мотор вообще некакой там и 1 ампера по 12 вольтам не будет.
Я эти «дрова еще не жог».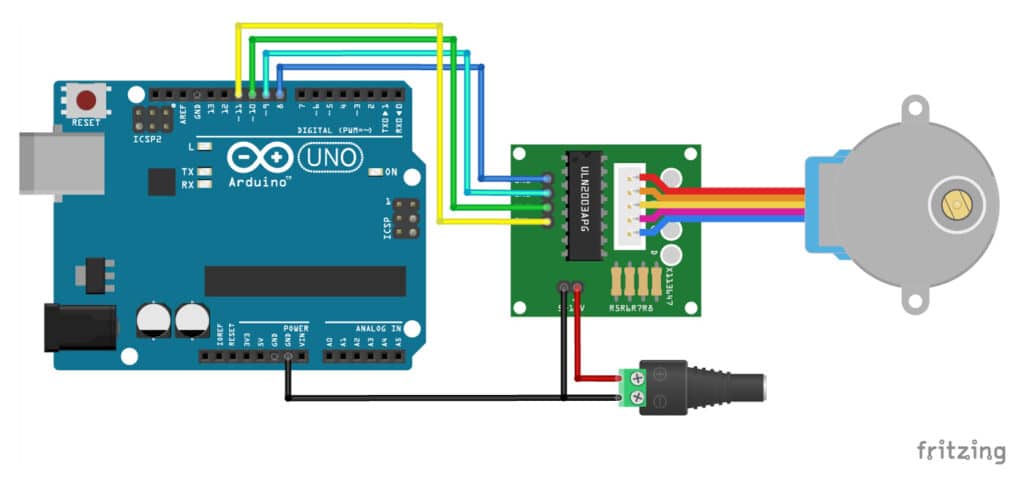 Если получится отпишитесь.
Если получится отпишитесь.
Источник
Видео
Проект на Arduino: шаговый двигатель CD ROM
ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]
Управление шаговым двигателем. Драйвер A4988, подключение и настройка
Шаговый двигатель от CD-ROM подключаем к Arduino.Motor Shield l293d.
Как подключить шаговый двигатель 28BYJ-48 к Arduino???
Stepper Motor Run Without Driver — Шаговый Двигатель Без Драйвера
Шаговый двигатель, как подключить без сложностей!!!!
Шаговый двигатель от дисковода / Stepper motor from CD
Управление моторами с Arduino
⚙️Управляем двигателем😁 Шаговый двигатель подключение
Как подключить шаговый двигатель 5 проводов
Содержание
- Подключение шагового двигателя к Ардуино
- Принцип работы шагового двигателя
- Драйвер шагового двигателя Ардуино
- Как подключить шаговый двигатель к Ардуино
- Изучаем миниатюрный шаговый двигатель
- Знакомство
- Эксперимент №1. L293D + ATtiny44
- Полношаговый режим. Одна фаза
- Полношаговый режим. Две фазы
- Эксперимент №2. TMC2208 + ATtiny44
- Эксперимент №3. ATtiny44-драйвер
- Отбросим все предосторожности
- Выводы
- Видео
 L293D + ATtiny44
L293D + ATtiny44Подключение шагового двигателя к Ардуино
Шаговый двигатель 28byj-48 Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим управление шаговым двигателем от Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели.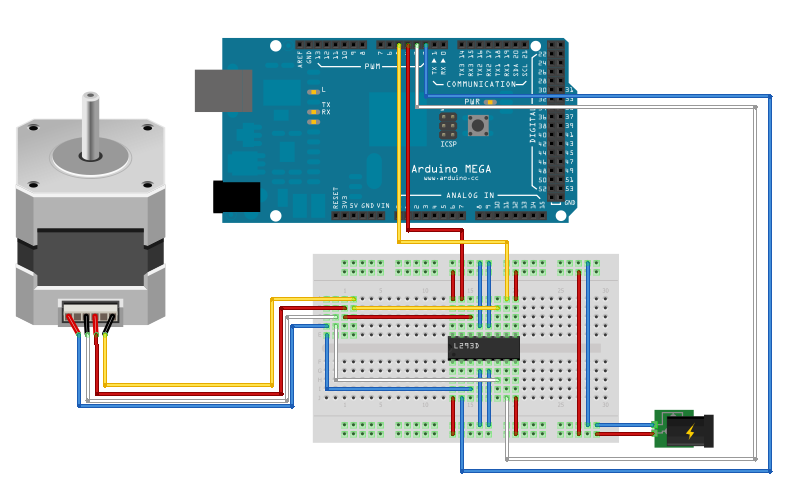 У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами.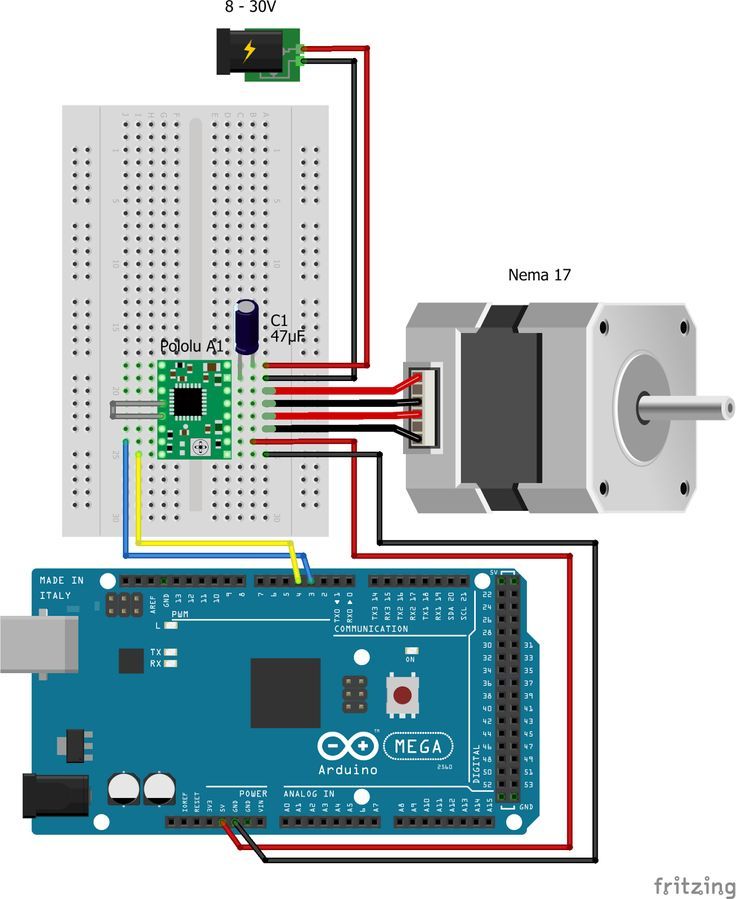 Каждый шаг вала (ротора) представляет собой часть полного оборота.
Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия нам потребуется:
Источник
Изучаем миниатюрный шаговый двигатель
Шаговые двигатели нашли широкое применение в современной промышленности и самоделках.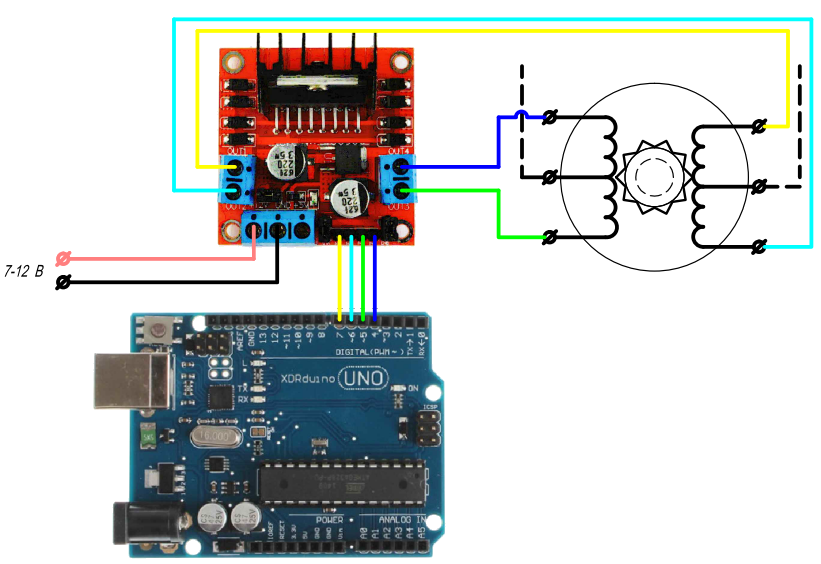 Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям.
Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В.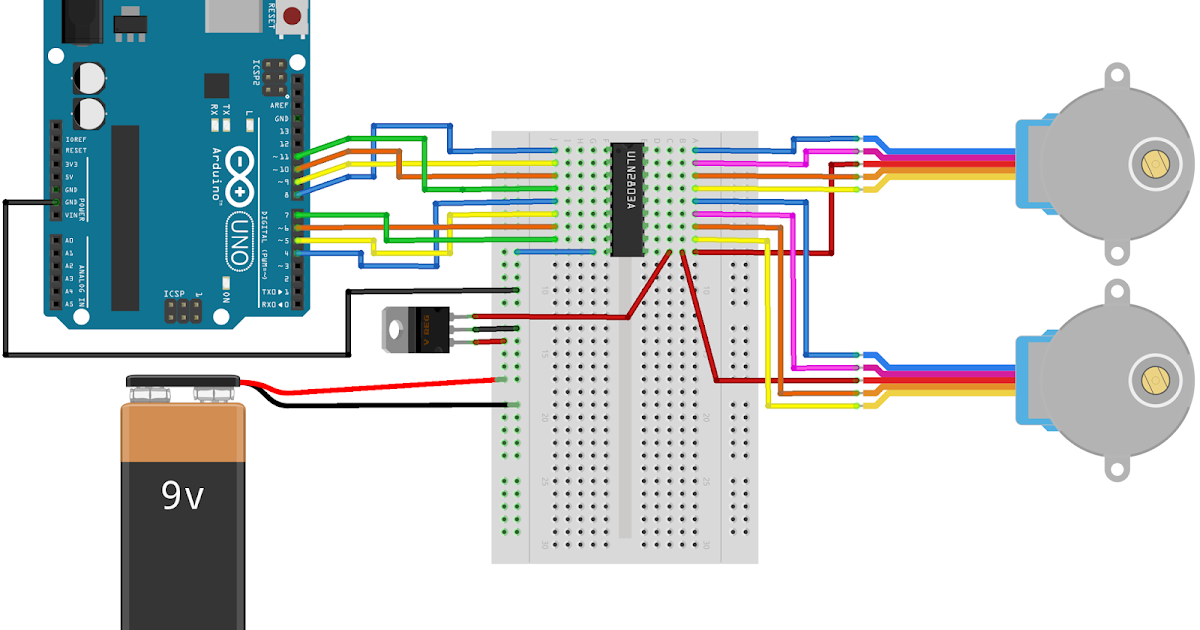 Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки.
Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D. Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.
Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал.
Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан).
Вот как выглядит собранная схема на макетной плате:
И вот так расположен наш подопытный:
Теперь можно приступать к экспериментам.
Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В:
I=U/R = 5В/26Ом = 190мА
Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться.
Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны.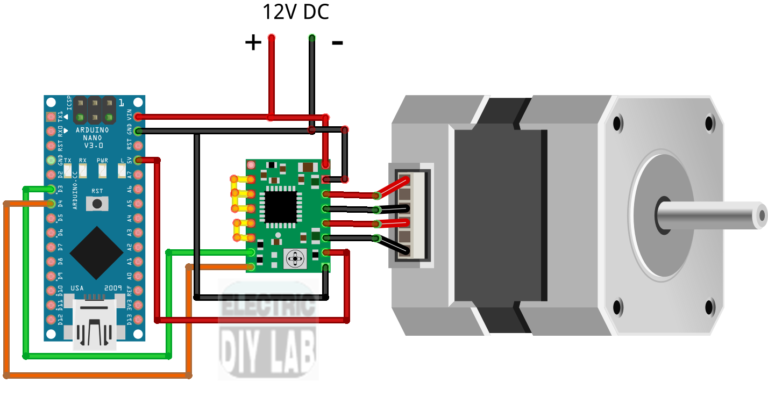 И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
Исходный код программы выглядит следующим образом:
Полношаговый режим. Одна фаза
Двигатель делает 16 шагов на один оборот. Причём шаги для двух фаз имеют не одинаковую угловую величину. Не знаю с чем это связано. Может конструкция двигателя такая?
Посмотрим на максимальную частоту шагов, которую он может обеспечить в таком режиме, не пропуская их.
Минимальная задержка между шагами 2мс, значит 500 шагов/секунду. Неплохо, это 31 об/сек = 1850 об/мин.
Полношаговый режим. Две фазы
Обратите внимание, что в этом случае шаги получаются ровнее, они одинаковы по величине (во всяком случае, более одинаковы, чем в предыдущем случае).
Естественно, в этом случае под напряжением находятся одновременно две обмотки и теплоотдача возрастает. Двигатель уже через несколько секунд нагревается достаточно сильно, потому эксперимент я прекратил.
Что с максимальной частотой шагов? 500 шагов/секунду; 31 об/сек = 1875 об/мин.
Надо сказать, что для шагового двигателя он довольно шустрый. Это связано с малым количеством магнитных полюсов на роторе.
Эксперимент №2. TMC2208 + ATtiny44
TMC2208 — название микросхемы-драйвера для управления биполярными шаговыми двигателями, аналогично называется модуль на её основе, который выпускается для установки в самодельные (и не только) 3D принтеры и имеет унифицированное расположение выводов.
Много и доходчиво сказано про этот модуль вот здесь.
В интернете много написано про то, как установить его в свой 3D принтер, но нас интересует как подключить модуль к микроконтроллеру, потому давайте разбираться.
Характеристики микросхемы впечатляют (только впечатлительных людей):
Управлять ей очень просто, по сути нужно всего два пина микроконтроллера. Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Один подключаем к DIR — указываем направление вращения двигателя, другой подключаем к STEP — при подаче импульса микросхема производит необходимые манипуляции с токами и напряжениями на обмотках двигателя и тот делает один шаг.
Схема подключения будет выглядеть так:
Дополнительно я использовал пин EN, чтобы отключать моторчик и длительное время не держать обмотки под напряжением.
Перед тем как всё запустить нужно произвести предварительную настройку модуля. Во-первых, выставить желаемый режим микрошага. Во-вторых, выставить желаемый максимальный ток двигателя.
С микрошагом всё просто. За это отвечают пины MS1 и MS2.
Отмечу, что микросхема не скачкообразно меняет напряжение, а делает это «плавно», но так как микросхема цифровая, то на выходе у нас не гладкий сигнал, а сигнал с маленьким шагом, если верить документации, то каждый шаг она разбивает на 256 микрошагов. Сделано это для увеличения плавности хода, снижения шумов от двигателя и по идее не должно позволять конструкции, к которой он прикручен, входить в резонанс. Короче, всё для того, чтобы 3D принтер работал тише.
Короче, всё для того, чтобы 3D принтер работал тише.
Чтобы выставить ток двигателя необходимо измерить напряжения на контакте Vref, который указан на рисунке. Изменить значение напряжения можно при помощи потенциометра, установленного рядом с контактом. Напряжение на контакте будет пропорционально току двигателя, и зависимость будет иметь следующий вид:
Нашему моторчику нужно примерно 150мА, потому Vref = 0,216В. Устанавливаем…
Подразумевается, что увеличение тока микросхема обеспечивает за счёт увеличения напряжения на обмотке. Потому, нужно позаботиться о том, чтобы этого напряжения хватило. Но, полагаю, для того маленького моторчика должно хватить и 5В.
Протестируем работу моторчика с различными режимами микрошага и посмотрим что получится (пауза между микрошагами 10мс):
Можно заметить, что движения моторчика стали более плавными (по сравнению с предыдущим экспериментом), однако характерные 16 шагов всё равно наблюдаются довольно чётко.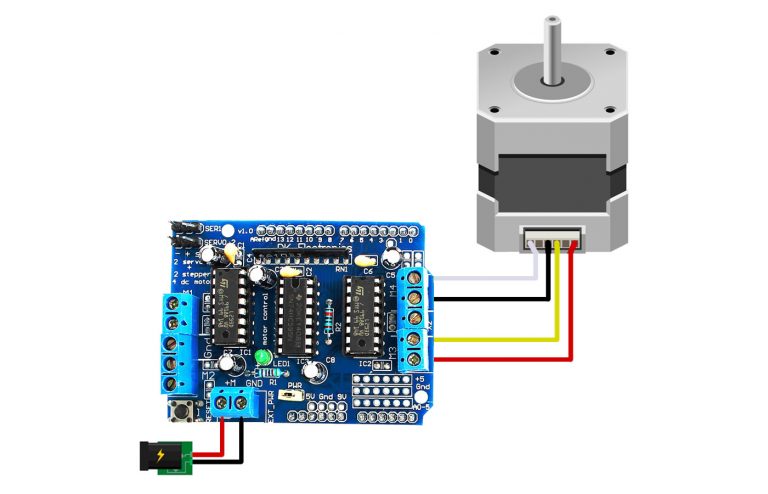 Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Что же… видимо это черта шаговых двигателей с ротором из постоянных магнитов.
Ещё необходимо отметить, что моторчик в этом режиме нагревается почти также сильно, как в полношаговом режиме с двумя фазами. Оно и понятно, обмотки постоянно находятся под напряжением, непрерывно происходит выделение тепла.
Полагаю, для таких моторчиков использование такого драйвера, да и вообще режимов микрошага не очень целесообразно.
Эксперимент №3. ATtiny44-драйвер
Вернёмся ненадолго к первому эксперименту и вспомним, что входы EN1 и EN2 микросхемы драйвера подключены к пинам OC0A и OC0B микроконтроллера. Это значит, что мы можем подать туда ШИМ сигнал, генерируемый при помощи таймера TIMER0 и таким образом изменять напряжение, прикладываемое к обмоткам двигателя и соответственно регулировать ток, который будет протекать через них.
Согласно даташиту на микроконтроллер ATtiny44 максимальный ток, который может выдать один пин составляет всего 40мА. Причём не указано для какого вида тока (пульсирующего или постоянного) эта характеристика.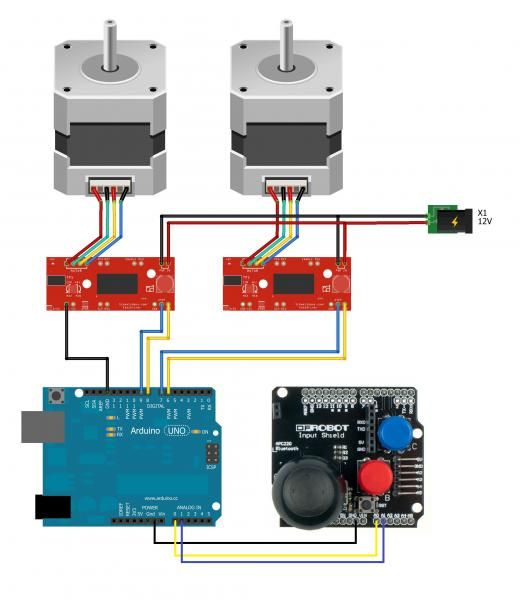 Просто она есть и она вот такая…
Просто она есть и она вот такая…
Надо сказать, что я более 7 лет знаком с микроконтроллерами фирмы ATMEL. И ни разу у меня не возникло желания проверить эту строчку из даташита.
Возможно, производитель просто подстраховывается и на самом деле он может выдать больше, а может это действительно максимум, что может выдать один пин.
Мы это выясним. Но сначала нужно выяснить при каком минимальном токе моторчик вообще способен вращаться.
Используя схему из первого эксперимента, подгоняем значение тока через обмотки равное 40мА. Запускаем в полношаговом режиме с двумя фазами (так как будет выше крутящий момент):
Отлично! При 40мА двигатель успешно запустился! Был также выявлено минимальное значение тока обмоток, необходимое для устойчивой работы мотора, и равно оно 30мА.
Разумеется, крутящий момент будет значительно ниже, но для нас важен сам факт того, что удалось запустить моторчик с таким маленьким энергопотреблением.
Схема подключения шагового двигателя к микроконтроллеру будет следующей:
Поскольку каждый пин микроконтроллера работает как полумост (может коммутировать вывод микросхемы либо на Vcc, либо на GND), то для управления биполярным шаговым мотором нам понадобиться 4 пина микроконтроллера.
Немного поясню как работает эта программа. Это модифицированный код из первого эксперимента. Как я говорил выше, будет использован 8 битный TIMER0 для генерирования ШИМ сигнала на выходах OC0A и OC0B. Таймер настраивается в режим FastPWM с предделителем на 8 (частота сигнала при 8МГц тактового генератора микроконтроллера составляет 3906Гц).
Чтобы изменять полярности сигналов на обмотках происходит переключение пина микроконтроллера от Vcc к GND изменением соответствующего бита в регистре PORTx и изменением коэффициента заполнения ШИМ путём записи значений в регистры OCR0A и OCR0B (значения подбирались экспериментально).
Курс схемотехники, прослушанный на первом курсе института подсказывает, что мультиметр показывает среднеквадратическое значение напряжения и тока в двигателе.
Шаговый двигатель вращается от пинов микроконтроллера без драйверов!
Но здесь мы не выходим за пределы возможностей микроконтроллера, по крайней мере, если верить тому, что пишут в документации. В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
В таком режиме микроконтроллер и моторчик могут работать долго. Действительно, эксперимент длился 20 минут. За это время не наблюдалось ни пропуска шагов, ни сброса контроллера, ни перегрева (ни у двигателя, ни у контроллера).
Отбросим все предосторожности
Уберём из эксперимента ШИМ и будем напрямую управлять пинами микроконтроллера при помощи регистров PORTx. Посмотрим что будет с микроконтроллером после этого.
Работает… с максимальным током в 51мА… Что же… неожиданно, похоже это и есть предельный ток, который может отдать один пин микроконтроллера? Если я ошибаюсь, поправьте меня.
В любом случае, ролик с ютуба не обманул. Действительно можно управлять этим моторчиком без всяких драйверов.
Выводы
Мы подробно изучили миниатюрные биполярные шаговые моторчики, их конструкцию и способы управления ими, для использования в собственных приложениях.
1. Миниатюрный биполярный шаговый мотор с ротором из постоянных магнитов действительно миниатюрный.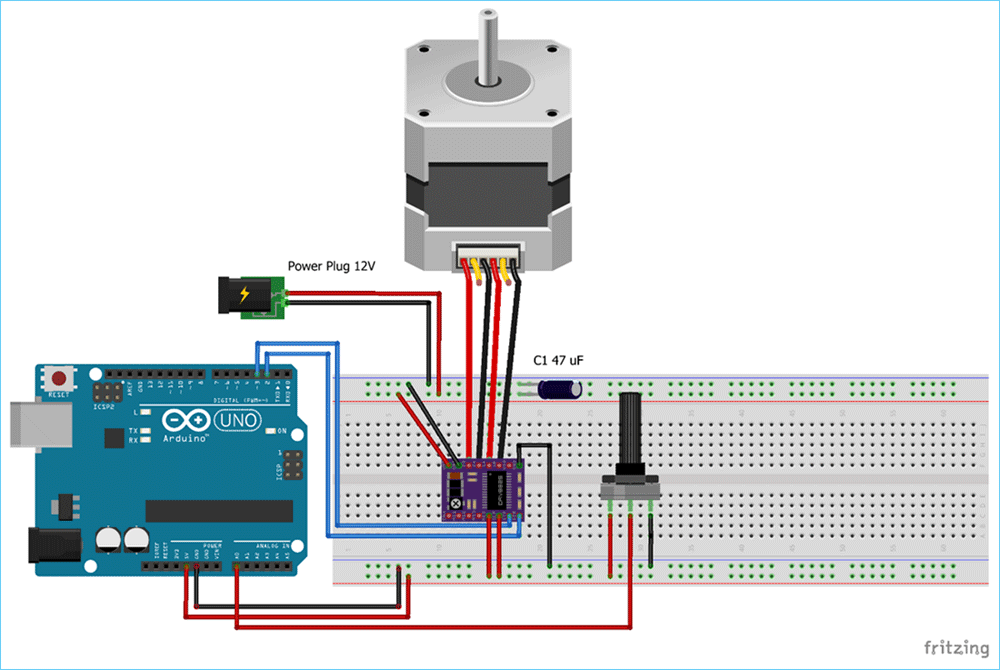
Его основные особенности:
3. Использование специализированного драйвера TMC2208 является спорным вопросом, так как микрошаговый режим не поддерживается самим двигателем, хотя переходы между шагами выполняются более плавно.
4. Возможно подключение шагового двигателя непосредственно к портам микроконтроллера. Но это только в рамках эксперимента, так как крутящий момент в данном случае совсем незначителен, да и малый ток не позволяет совершать шаги с большой скоростью.
В следующий раз расскажу, для чего именно нам потребовались такие маленькие шаговые моторчики.
Источник
Видео
Шаговые Двигатели Подключение и Запуск
Переделка шагового двигателя в обычный биполярный
Подключаем униполярные шаговые двигатели
Униполярные шаговые двигатели и их переделка в биполярные. Большой обзор, переделка и подключение.
ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]
Шаговый двигатель, как подключить без сложностей!!!!
Управление шаговым двигателем.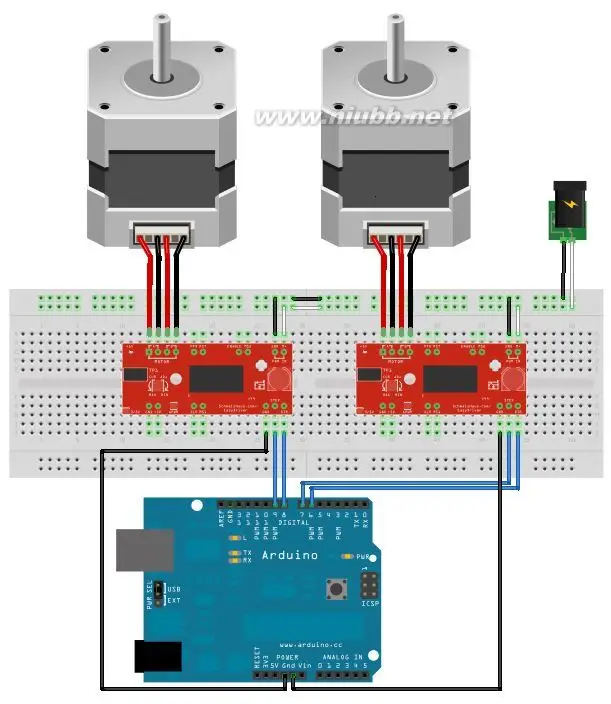 Драйвер A4988, подключение и настройка
Драйвер A4988, подключение и настройка
Как соединить обмотки шагового двигателя (параллельное подключение) — Stepper motor winding
🔨 КАК ЗАПУСТИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ 💡 Без Драйвера!
Как запустить шаговый двигатель без микросхемы(очень просто)
Как подключить шаговый двигатель от принтера
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу. Станки и мехатроника. Станки с ЧПУ. Фрезерные станки с ЧПУ 6. Колонные бесконсольные станки с ЧПУ 1. Портальные станки с ЧПУ 4.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как подключить шаговый двигатель с 6 выводами
- Схемы подключения шаговых двигателей.
- Мой самодельный ветрогенератор на шаговом двигателе
- Управление Ардуино шаговым двигателем от принтера
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Форум по СНПЧ: Шаговый двигатель из принтера — Форум по СНПЧ
- Как работает шаговый электродвигатель?
- Управление и подключение шагового двигателя к Ардуино (Arduino)
- Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Шаговые Двигатели Подключение и Запуск
Как подключить шаговый двигатель с 6 выводами
Статьи и видео. Другие измерительные приборы, платы и электронные компоненты. Что такое шаговый двигатель и как им управлять. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Другие измерительные приборы, платы и электронные компоненты. Что такое шаговый двигатель и как им управлять. При этом вращение ротора осуществляется пошагово с фиксацией в конечной позиции.
Каждый шаг представляет собой угол, величина которого зависит от устройства соответствующего двигателя. Кроме того, величиной угла можно управлять. Шаговые двигатели используются в самых разных областях: в автомобилестроении, приборостроении, везде, где требуется механическое движение с высокой точностью позиционирования. Популярно использование шагового двигателя и в точной робототехнике. Устройство шагового двигателя. Как любой мотор, шаговый двигатель состоит из статора и ротора.
Обмотки шагового двигателя выполнены на статоре. Они не зависят друг от друга. На роторе установлены постоянные магниты. Когда ток подается на одну из обмоток, ротор поворачивается на соответствующий угол, после чего останавливается. Подача тока на следующую обмотку опять вызывает поворот ротора, за которым следует остановка. Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Число импульсов, поданных на двигатель, определяют угол поворота ротора. От частоты импульсов зависит, будет ли вращение ротора скачкообразное или непрерывное.
Таким образом, устройство шагового двигателя позволяет контролировать угол поворота ротора и частоту его вращения. В отличие от сервопривода никакого датчика позиционирования в устройстве шагового двигателя не предусмотрено.
Если есть желание разобрать двигатель, чтобы познакомиться с его устройством, то это плохая идея. Система ротор-статор представляет собой замкнутый магнитопровод, который при вмешательстве теряет ряд своих свойств, что может негативно сказаться на работе двигателя.
Поэтому разбирать двигатель категорически не рекомендуется. Принцип работы шагового двигателя. Перемещение шагового двигателя состоит из многочисленных шагов. Управление шаговым двигателем осуществляется с печатной платы, питание может подаваться от источника постоянного тока.
Отличие шагового двигателя от сервопривода. В отличие от сервопривода шаговый двигатель перемещается по шагам.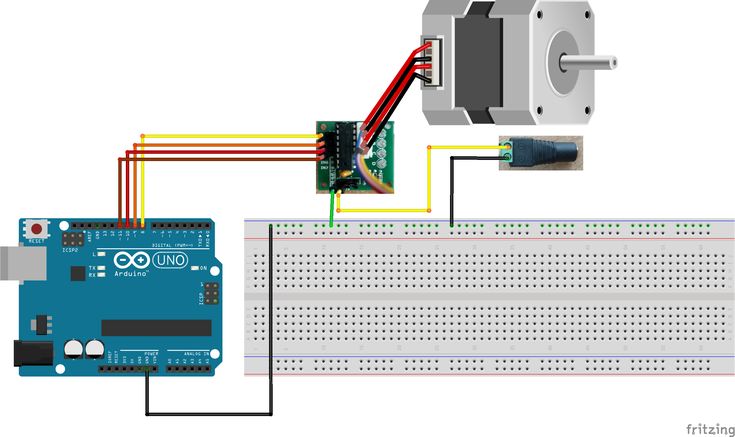 Благодаря этому с его помощью можно совершать очень точные движения. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом. Основные технические характеристики шагового двигателя.
Благодаря этому с его помощью можно совершать очень точные движения. У шагового двигателя такого ограничения нет. Он может вращаться непрерывно. Однако управлять шаговым двигателем сложнее, чем сервоприводом. Основные технические характеристики шагового двигателя.
Крутящий момент — механическая характеристика шагового двигателя. Чем выше крутящий момент, тем лучше способность двигателя преодолевать возникающее при вращении сопротивление. Удерживающий момент — это момент блокировки ротора, когда шаговый двигатель находится под напряжением, но вращения не происходит.
Стопорный момент тормозящий момент нужен, чтобы при совершении шага происходила фиксация ротора в конечной позиции. При отсутствии стопорного момента без поданного питания происходило бы проворачивание. Номинальное напряжение — зависит от индуктивности двигателя. Чем выше индуктивность, тем выше требуется напряжение. Номинальный ток — подается на обмотки шагового двигателя. Измеряется в Амперах.
Угол полного шага — способность двигателя совершать перемещение при одном шаге, указывается в градусах. Момент инерции ротора — влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора. Длина двигателя — длина корпуса без вала. Типы шаговых двигателей.
Момент инерции ротора — влияет на способность двигателя к разгону. Чем выше момент инерции, тем хуже разгон мотора. Длина двигателя — длина корпуса без вала. Типы шаговых двигателей.
По строению различают следующие типы шаговых двигателей:. Шаговый двигатель с постоянным магнитом. Постоянный магнит такого двигателя выполнен в виде диска. Он расположен на роторе, и создает крутящий момент за счет притяжения и отталкивания обмотки на статоре. Шаговый двигатель с переменным магнитным сопротивлением. Такой шаговый двигатель не имеет постоянного магнита. На его роторе расположено зубчатое колесо из специального металла. Крутящий момент невысокий, но зато отсутствует стопорящий момент.
Гибридный шаговый двигатель. Представляет собой сочетание двух вышеперечисленных видов двигателей. Для гибридных двигателей характерна очень маленькая величина шага, в результате чего они способны достигать максимальной точности. Однако стоимость таких двигателей достаточно высока. По типу обмотки шаговый двигатель может быть униполярным и биполярным.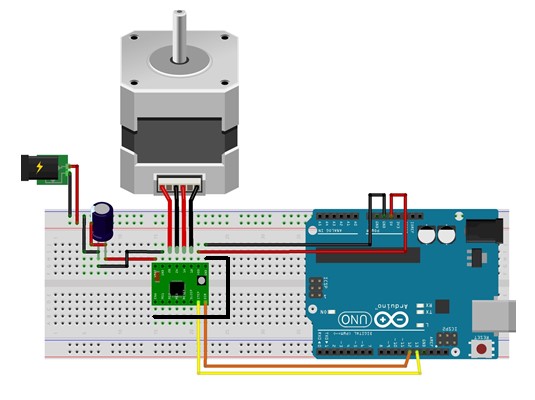 Преимущества шаговых двигателей. Для выполнения этих действий требуется минимальное время. Стабильная работа при высоких нагрузках. Позиционирование полностью определяется поступающими импульсами.
Преимущества шаговых двигателей. Для выполнения этих действий требуется минимальное время. Стабильная работа при высоких нагрузках. Позиционирование полностью определяется поступающими импульсами.
Подключение шагового двигателя к печатным платам Arduino. Доступная цена шаговых двигателей и их точная эффективная работа сделали такие двигатели востребованным компонентом в любительской робототехнике.
Для реализации различных творческих проектов шаговые двигатели подключатся к программируемому контроллеру Arduino. Такое подключение выполнить достаточно просто.
Обычно шаговый двигатель имеет от 4 до 6 проводов для подключения. Если у шагового двигателя четыре провода, то это биполярный двигатель. У биполярного двигателя два провода подключаются к одной обмотки, два — к другой. Шесть проводов имеет униполярный двигатель. При этом два провода подключаются к концам каждой обмотки, а один — к ее середине.
Эти провода подключаются к заземлению. В униполярном двигателе за счет способа его подключения скорость вращения выше, но меньше крутящий момент.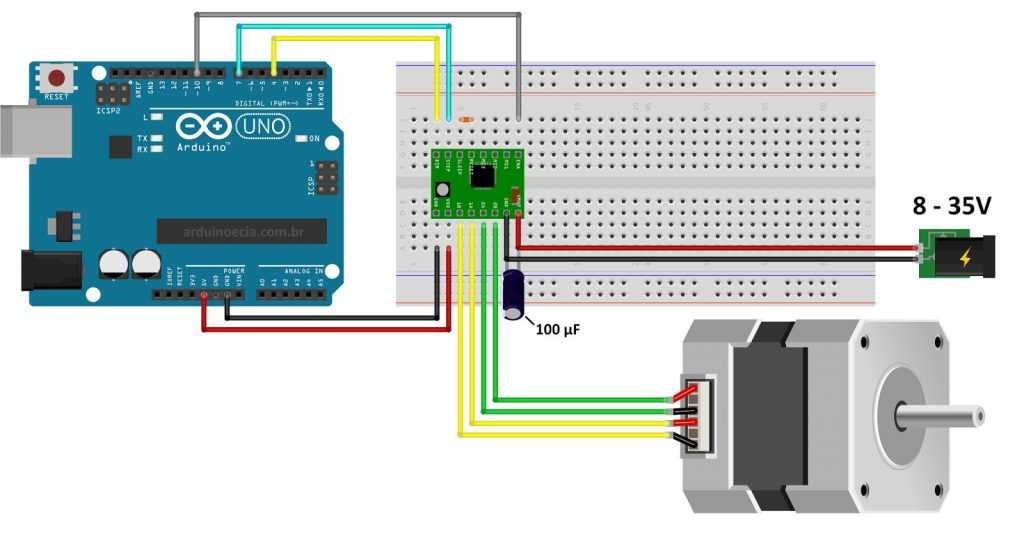 Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода. При этом для контроллера не имеет значение, какой способ подключения выбран.
Если требуется увеличить крутящий момент, то из униполярного двигателя всегда можно сделать биполярный. Для этого просто не нужно подключать дополнительные провода. При этом для контроллера не имеет значение, какой способ подключения выбран.
В обоих случаях управление производится через два выхода для каждой обмотки. Способ подключения выбирается в зависимости от того, что является в приоритете: скорость вращения или крутящий момент. Нет необходимости задействовать ШИМ-выходы, так как управление двигателем зависит только от подачи тока на обмотки.
ШИМ-выходы используются для полушаговых и микрошаговых режимов. С их помощью можно повысить скорость и улучшить точность работы двигателя, а к тому же значительно снизить уровень шума. Но при этом при полушаговом и микрошаговом режиме снижается момент и усложняется способ управления шаговым двигателем. Питание шагового двигателя.
Рекомендуется использовать внешний источник питания В, в противном случае ресурсов платы Arduino может оказаться недостаточно.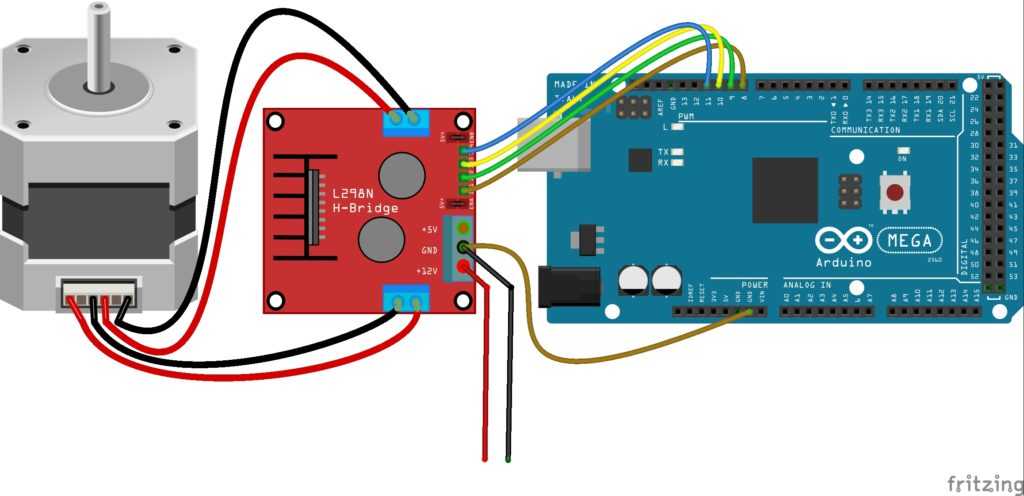 Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Следует всегда помнить, что во время подключения или отключения двигателя на программируемый контроллер не должно подаваться питание! Иначе контроллер может просто сгореть.
Библиотеки и управление шаговым двигателем. Использование библиотеки позволяет упростить управление шаговым двигателем. Среди предлагаемых библиотек можно выделить библиотеку Stepper и Accel Stepper. Библиотеку Stepper не нужно скачивать, она входит в Arduino IDE и подойдет для управления шаговым двигателем в простых проектах, предусматривающих использование лишь одного двигателя. Библиотека Stepper подключается командой include. Библиотека Accel Stepper обладает большими возможностями.
Например, с ее помощью можно управлять сразу несколькими шаговыми двигателями, а также их работой на низких скоростях. Эта библиотека предусматривает возможность ускорения и замедления. А главное она позволяет добиться плавной работы мотора. После подключения библиотеки создается объект stepper и указывается, к каким пинам подключаются обмотки.
Для этого необходимо задать количество шагов для одного оборота вала. Также для управления шаговым двигателем используется драйвер.
Схемы подключения шаговых двигателей.
В этой статье мы поговорим о шаговых двигателях в проектах ардуино. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Схема работы шаговых двигетелй, способ подключения к Arduino и примеры скетчей — все это вы найдете в этой статье.
Для проверки работоспособности шагового двигателя можно подключить, например, красный светодиод. Вращая вал двигателя, можно наблюдать.
Мой самодельный ветрогенератор на шаговом двигателе
Дневники Файлы Справка Социальные группы Все разделы прочитаны. Как запустить шаговый двигатель? Когда-то работал на заводе. Довелось демонтировать старый принтер. От него у меня осталась вот такая штука: Можно ли ее запустить без контроллера? А если нет, то где взять или как собрать этот контроллер? И по силам ли это будет тому, кто не знает электротехники? Оценка 0. Крупнейшее в Китае предприятие по производству прототипов печатных плат, более , клиентов и более 10, онлайн-заказов ежедневно. Цель запуска?
Крупнейшее в Китае предприятие по производству прототипов печатных плат, более , клиентов и более 10, онлайн-заказов ежедневно. Цель запуска?
Управление Ардуино шаговым двигателем от принтера
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель , который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую.
Имеется шаговый мотор с 5 выводами. Что я смог выяснить — этот моточик имеет 4 обмотки и один из выводов общий для всех выводов и сопротивление 5 Ом.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
Перейти к содержимому. Система для сообществ IP.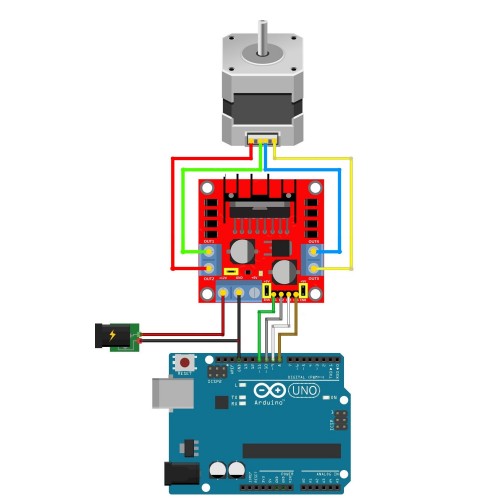 Лицензия зарегистрирована на: www. Вход Новый пользователь? Регистрация Помощь.
Лицензия зарегистрирована на: www. Вход Новый пользователь? Регистрация Помощь.
Форум по СНПЧ: Шаговый двигатель из принтера — Форум по СНПЧ
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах. Потом шестерня слезала. Без деструкции эту шестерню не одолеть, на горячую посажена. Сидит намертво.
Шаговый Двигатель От Принтера .. Так как с помощью LDNE подключить его к меге8, а проще, как переделеть готовую схему для.
Как работает шаговый электродвигатель?
By Шидя , December 3, in Автоматика. Можно ли каким то простым способом запустить шаговый двигатель не используя специальные сложные схемы запуска? Двигатель имеет пять выводов.
Управление и подключение шагового двигателя к Ардуино (Arduino)
ВИДЕО ПО ТЕМЕ: 🔨 КАК ЗАПУСТИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ 💡 Без Драйвера!
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах.
Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. Шаговый двигатель — это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах.
В этом уроке вы узнаете, как управлять с помощью Ардуино шаговым двигателем, который был взят от старого принтера. Ротор является частью двигателя, который фактически вращается и обеспечивает работу.
Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность. Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя ШД.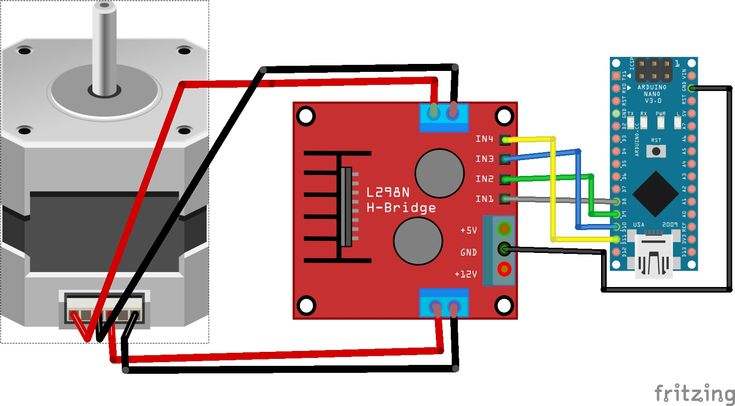
Поиск новых сообщений в разделах Все новые сообщения Компьютерный форум Электроника и самоделки Софт и программы Общетематический. Как запустить шаговый двигатель? Сообщение от den Ads Яндекс.
Arduino — шаговый двигатель | Учебник по Arduino
сообщите об этом объявлении
ВНИМАНИЕ
Этот учебник в настоящее время обновляется.
| 1 | × | Arduino UNO or Genuino UNO | |
| 1 | × | USB 2.0 cable type A/B | |
| 1 | × | Arduino Моторный щит R3 | |
| 1 | × | Шаговый двигатель |
Обратите внимание: это партнерские ссылки. Если вы покупаете компоненты по этим ссылкам, мы можем получить комиссию без каких-либо дополнительных затрат для вас. Мы ценим это.
Существует два типа шаговых двигателей: биполярный шаговый двигатель и униполярный шаговый двигатель. Они отличаются друг от друга внутренним устройством и принципом работы.
Невооруженным глазом они похожи друг на друга. Однако мы можем отличить их по количеству проводов. Биполярный двигатель обычно имеет четыре провода. Униполярный двигатель обычно имеет шесть проводов.
Управление биполярным и униполярным шаговым двигателями отличается. К счастью, мы можем управлять униполярным шаговым двигателем, как если бы это был биполярный шаговый двигатель, используя четыре из шести проводов.
Шаговый двигатель требует больше энергии, чем может ему дать плата Arduino, поэтому для него вам понадобится другой блок питания. В идеале в паспорте или руководстве по шаговому двигателю указано напряжение источника питания.
Мы НЕ МОЖЕМ подключить шаговый двигатель напрямую к Arduino. Мы ДОЛЖНЫ подключаться через драйвер двигателя или контроллер двигателя.
Драйвер двигателя и контроллер двигателя могут быть:
Чип (например, SN754410)
Модуль (например, A4988)
Shield (например, Arduino Motor Shield Rev3, контроллер шагового двигателя PES-2605, Adafruit Motor/Stepper/Servo Shield)
Чтобы облегчить работу новичкам, мы рекомендуем использовать один из следующих шилдов:
Arduino Motor Shield Rev3: это официальный шилд от Arduino.
Контроллер шагового двигателя PES-2605: очень прост в использовании. Кроме того, его библиотека поддерживает различные функции. Он поддерживает метод микрошагов, который обеспечивает плавное движение шагового двигателя. Компания, производящая этот щит, хорошо предоставила документацию и учебные пособия. Однако, чтобы использовать этот щит, нам нужно использовать его вместе с шилдом PHPoC WiFi. Это НЕ добавляет трудностей, но увеличивает стоимость.
Если стоимость для вас не имеет значения, мы рекомендуем использовать контроллер шагового двигателя PES-2605.
Если вам нужно сэкономить, мы рекомендуем использовать Arduino Motor Shield Rev3.
Стек Arduino Motor Shield Rev3 на Arduino Uno
Подключите шаговый двигатель к Arduino Motor Shield Rev3
Изображение разработано с помощью Fritzing. Нажмите, чтобы увеличить изображение
Загрузите или скопируйте приведенный выше код и откройте с помощью Arduino IDE
Нажмите кнопку «Загрузить» в Arduino IDE, чтобы загрузить код в Arduino
Откройте Serial Monitor, чтобы увидеть результат:
Автопрокрутка
Показать временную метку
Очистить вывод
9600 бод
Новая строка
Мы планируем сделать видеоуроки.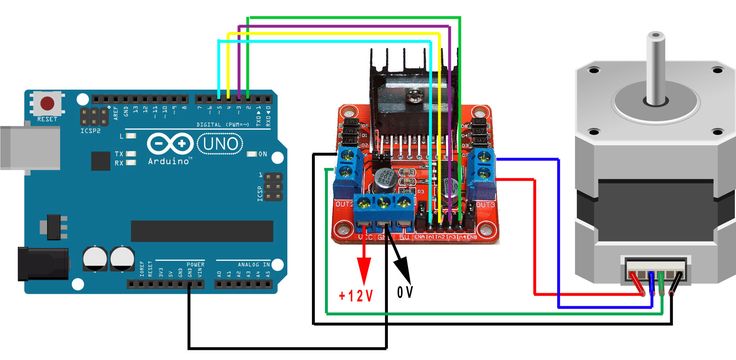 Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
НЕ беспокойтесь, если шаговый двигатель вибрирует во время движения. Это характеристика шагового двигателя. Мы можем уменьшить вибрацию, используя метод микрошагового управления.
Кроме того, из-за этой характеристики при правильном управлении шаговый двигатель может издавать музыкальные звуки, как если бы он был музыкальным инструментом. Вы можете увидеть этот проект на Arduino Project Hub.
Полный шаг: единицей перемещения является один шаг, который эквивалентен значению градуса, указанному в техническом описании или руководстве по шаговому двигателю.
Половина шага: каждый полный шаг делится на два меньших шага. Единицей перемещения является половина полного шага. Этот метод позволяет двигателю двигаться с двойным разрешением.
Микрошаг: каждый полный шаг делит на множество меньших шагов.
Единицей перемещения является часть полного шага. Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
 Единицей перемещения является часть полного шага. Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
Единицей перемещения является часть полного шага. Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.Например, если в спецификации двигателя указано 1,8 градуса/шаг:
Полный шаг: двигатель может двигаться с шагом 1,8 градуса/шаг <⇒ 200 шагов/оборот
Полушаг: Двигатель может двигаться с шагом 0,9 градуса/шаг <⇒ 400 шагов/оборот
Микрошаг: Двигатель может двигаться с шагом 0,45, 0,225, 1125, 0,05625 градуса/шаг <⇒ 800, 1600, 3200, 6400... шагов/оборот
В приведенном выше коде использовался полношаговый метод управления.
Это расширенное использование. Новичкам не нужно обращать на это внимание. Это происходит в диапазоне скоростей, в котором скорость шага равна собственной частоте двигателя. Может быть слышно изменение шума двигателя, а также усиление вибрации. В реальных приложениях разработчик ДОЛЖЕН обратить внимание на этот вопрос.
Может быть слышно изменение шума двигателя, а также усиление вибрации. В реальных приложениях разработчик ДОЛЖЕН обратить внимание на этот вопрос.
Посмотрите лучший комплект Arduino для начинающих
※ НАШИ СООБЩЕНИЯ
МЫ ДОСТУПНЫ В АРЕНДУ. Узнайте, как нанять нас для создания вашего проекта
Если этот урок полезен для вас, пожалуйста, мотивируйте нас сделать больше уроков.
Вы можете поделиться ссылкой на это руководство где угодно. Однако, пожалуйста, не копируйте контент для публикации на других сайтах. Мы потратили много времени и сил на создание содержания этого урока, пожалуйста, уважайте нашу работу!
Следуйте за нами
Поделитесь с друзьями, чтобы помочь нам распространить руководство!
Arduino-совместимый шилд с ЧПУ Инструкции
Первый запуск
Важные моменты, которые следует учитывать перед началом работы:
1) Дважды проверьте полярность входного питания («+» и «-»)
2) Обратите внимание на ориентацию драйверов шаговых двигателей. Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне
Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне
Контрольный список перед полетом
1. Визуально проверьте все места пайки на новой плате.
2. Подключите экран к плате Arduino и загрузите прошивку GRBL, выполнив следующие шаги:
- Загрузите исходный код GRBL. Скачать здесь
- Разархивируйте загрузку, и у вас будет папка с именем «grbl-master»
- Запустите среду разработки Arduino. (Пожалуйста, убедитесь, что вы используете самую последнюю версию Arduino IDE.)
- Загрузите GRBL в Arduino IDE как библиотеку. (Щелкните раскрывающееся меню «Эскиз», затем перейдите к «Включить библиотеку» и выберите «Добавить библиотеку .ZIP») 9.0076
- ВАЖНО: выберите папку «Grbl» внутри папки «grbl-master», которая содержит только исходные файлы и пример каталога. (Если вы случайно выбрали файл .zip или неправильную папку, вам нужно будет перейти в библиотеку Arduino, удалить ошибку и повторить этот шаг. )
- Откройте пример Arduino «GrblUpload». (Нажмите раскрывающееся меню «Файл», перейдите к «Примеры-> Grbl» и выберите «GrblUpload»)
- Скомпилируйте и загрузите GRBL на Arduino. (1. Подключите Arduino Uno к компьютеру. 2. Убедитесь, что ваша плата настроена на Arduino Uno в меню «Tool->Board», а последовательный порт правильно выбран в «Tool->Serial Port». 3 . Нажмите «Загрузить», и GRBL должен скомпилироваться и прошить на ваш Arduino!0076
 )
)3. Откройте последовательное соединение с платой Arduino и проверьте, запущен ли GRBL. (Мы используем универсальный отправитель G-кода для подключения к GRBL)
4. Драйверы шаговых двигателей A4988 нуждаются в настройке для опорного напряжения. Мы рассмотрим это подробно позже.
5. Тестирование каждого разъема контроллера шагового двигателя по отдельности имеет решающее значение.
- Убедитесь, что внешний источник высокого напряжения не включен и не подключен
- Подключите шаговый двигатель к разъему контроллера шагового двигателя, который вы хотите проверить. Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.
- Затем установите драйвер шагового двигателя, убедившись, что контакт включения на драйвере совмещен с контактом включения на экране.
- Подключите внешний источник питания к экрану, убедившись, что вы подключили питание правильно. Неправильное подключение может привести к повреждению экрана, драйверов шагового двигателя и платы Arduino.
- Отправьте g-код на тестируемую ось. Шаговый двигатель должен двигаться, если все работает. (Пример GCode: «G1 X5?» или «G1 X0?» или «G1 Y5?»)
- Повторите вышеуказанный процесс для каждой оси, используя один и тот же шаговый драйвер. (Тестирование с одним драйвером снижает риск одновременного повреждения нескольких шаговых драйверов. )
 Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.
Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе. )
)6. После проверки всего вышеперечисленного подключите все драйверы и включите систему.
Регулировка предела тока (опорного напряжения) для драйвера шагового двигателя
A4988, продаваемый Zyltech, Rs = 0,1 Ом. Таким образом, максимальный ток составляет Vref/0,4
Vref (опорное напряжение) измеряется с помощью мультиметра в точках, указанных
Drv 8825, проданный Zyltech. Максимальный ток = Vref x 2
Опорное напряжение регулируется маленькой отверткой в точке, указанной белой стрелкой на рисунке справа. Мы предлагаем регулировать опорное напряжение небольшими шагами — не более четверти оборота за раз. Для начала вы можете установить максимальный ток 1А. Если двигатель перегревается, уменьшите Vref. Если двигатель не двигается или пропускает шаги, увеличьте Vref.
Настройки перемычек
Перемычки используются для настройки конфигурации 4-й оси, микрошага и конечной остановки.
Конфигурация 4-й оси
С помощью двух перемычек можно настроить 4-ю ось для клонирования оси X, Y или Z. Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси)
Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси)
Клонировать ось X на 4-й шаговый драйвер | Клонировать ось Y для 4-го шагового привода | Клонировать ось Z для 4-го шагового привода | Используйте D12 и D13 для управления драйвером 4-го шагового двигателя |
Настройка микрошага для каждой оси
*В приведенных ниже таблицах высокий уровень означает, что перемычка установлена, а низкий уровень означает, что перемычка не установлена.
Pololu A4988 Конфигурация шагового драйвера:
MS0 MS1 MS2 Решение микростепа
Низкий низкий низкий шаг
Высокий низкий низкий половина
Низкий высокий шаг
высокий высокий уровень высокого уровня
высокий высокий высокий шестьнадцатый ступень
990 1212121212121212121212121212121212121212121212121212121212121212121212121212121212121212121212тели высокого уровня
Высокий высокий высокий шестернад. Конфигурация драйвера шагового двигателя DRV8825:
MODE0 MODE1 MODE2 Microstep Разрешение
Низкий низкий низкий уровень полного шага
Низкий низкий низкий уровень половины
Низкий низкий низкий 1/4 шаг
Высокий высокий низкий уровень 1/8 стадия
Низкий низкий высокий 1/16 Шаг
Высокий высокий высокий 1/32 Шаг
Низкий высокий 1/1/ 32 шага
Высокий Высокий Высокий 1/32 шага
По умолчанию GRBL настроен на срабатывание предупреждения, если конечный упор становится низким (становится заземленным). | Концевые выключатели — это стандартные «всегда открытые» выключатели. Концевой упор активируется, когда контакт конечного упора соединяется с землей (при настройке с настройками GRBL по умолчанию). |
 Это обсуждалось, и некоторые люди просили иметь активные верхние конечные упоры. Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)
Это обсуждалось, и некоторые люди просили иметь активные верхние конечные упоры. Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)Конфигурация конечной остановки
Концевые выключатели, входящие в комплект ZYLtech, имеют три провода. Такие концевики просты в использовании, контроле и установке, особенно по сравнению с простыми механическими переключателями. Однако, в отличие от экрана RAMPS, экран CNC предоставляет только 2 PIN-заголовка. Существует два способа установки концевых упоров:
Подключение двигателей
Подключение шаговых двигателей ZYLtech Nema 17 очень просто.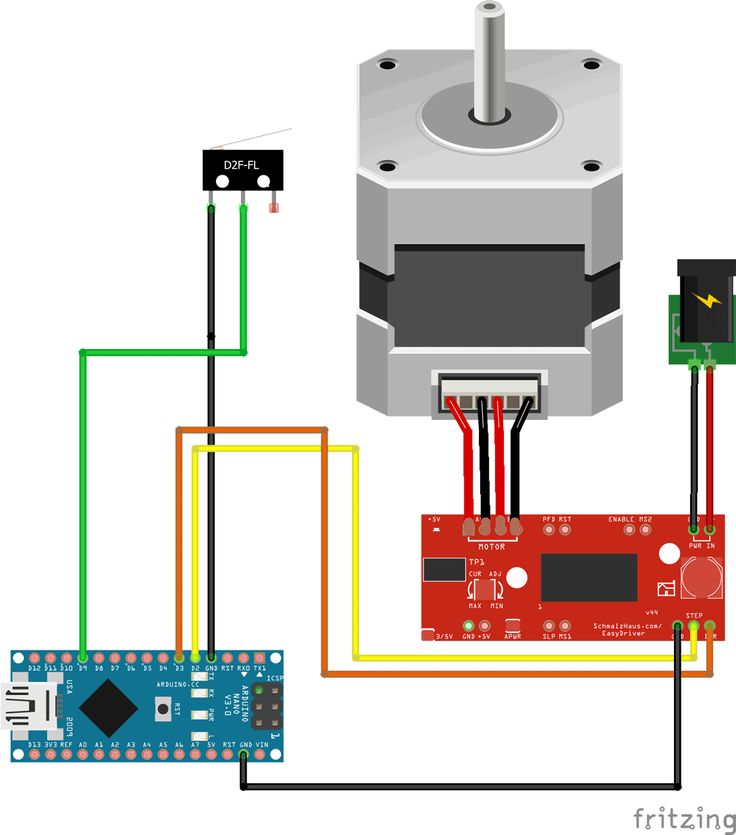 Подключите разъемы к заголовкам для каждой оси. Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.
Подключите разъемы к заголовкам для каждой оси. Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.
Распиновка шагового двигателя
NEMA 34, особенности, проводка, взаимодействие с Arduino
Шаговый двигатель
NEMA 34 представляет собой гибридный шаговый двигатель, обладающий лучшими характеристиками шагового двигателя с переменным сопротивлением, а также шагового двигателя с постоянными магнитами. Это тяжелый двигатель и потребляет большой ток до 5А. Мотор делает 200 шагов за один оборот с углом шага 1,8 градуса и лицевой панелью 3,4×3,4 дюйма. Это двухфазный двигатель с точностью шага ±5%. Он управляется блоками микроконтроллера косвенно через соответствующие драйверы двигателей.
Шаговые двигатели NEMA 34 доступны в различных версиях в зависимости от удерживающего момента, номинального тока, инерции ротора и физических размеров. Они используются в станках с числовым программным управлением, 3D-прототипировании, проектах робототехники и в различном промышленном оборудовании.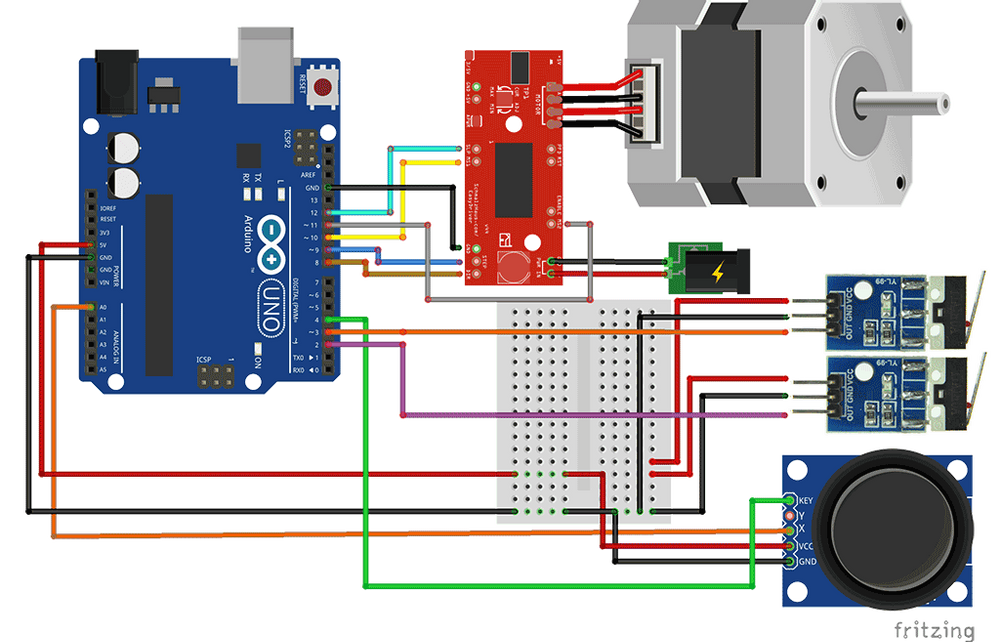
Содержание
Распиновка NEMA 34
На следующей схеме показана разводка выводов шагового двигателя NEMA 34:
Детали проводов
Давайте обсудим разводку выводов шагового двигателя NEMA 34. Детали конфигурации проводов в таблице указаны ниже:
| Wire Color | Function |
|---|---|
| RED | Motor Coil1 connection |
| GREEN | Motor Coil1 connection |
| BLUE | Motor Coil2 connection |
| YELLOW | Motor Подключение катушки 2 |
Работа NEMA 34 Шаговый двигатель
Шаговый двигатель, как следует из названия, работает по шаговому принципу. Это означает, что двигатель завершает свое вращение в виде шагов. Двигатель получает импульсы от контроллера для перемещения шагов и завершения вращения. Один полученный импульс равен одному шагу. С каждым шагом он охватывает определенный угол шага, который обеспечивает контроль над положением двигателя. Обычно количество шагов равно 200, а угол шага составляет 1,8 градуса.
Обычно количество шагов равно 200, а угол шага составляет 1,8 градуса.
Частота импульсов прямо пропорциональна скорости двигателя. Чтобы увеличить скорость вращения, нужно увеличить частоту импульсов.
NEMA 34 Спецификации
- Оценки тока: 4A — 5A
- Унитолярный крутящий момент. за оборот: 200 шагов
- Точность шага: ±5%
- Точность сопротивления: ±10 %
- Точность индуктивности: ±20 %
- Максимальное повышение температуры: 80 °C
- Температура окружающей среды: от -20 °C до 50 °C
- Минимальное сопротивление изоляции при 500 В: 107 МОм
Прочность при 3 мА: 820 В переменного тока
- Радиальный зазор при 450 г: 0,02 мм
- Торцевой зазор при 450 г: 0,08 мм
- Радиальное усилие: 220 Н
- Осевое усилие: 60 Н от номинальных токов, удерживающего крутящего момента, фазной индуктивности и т. д. Техническое описание предоставляется для ознакомления с дополнительными техническими данными в соответствии с требованиями.
Взаимодействие шагового двигателя NEMA 34 с Arduino UNO
В этом разделе рассматривается взаимодействие шагового двигателя NEMA 34.
Поскольку шаговые двигатели NEMA 34 рассчитаны на тяжелые условия эксплуатации, их нельзя подключать напрямую к блоку микроконтроллера. Для работы он должен быть подключен к соответствующему модулю драйвера шагового двигателя. Они совместимы с STP-048, STP-140, CW-2450, CW-230 и т. д., которые могут выдерживать большие токи. Контакты включения, импульса и направления соответствующего драйвера шагового двигателя подключены к контактам Arduino UNO. Контакт включения служит для расширения возможностей модуля драйвера. Импульсный контакт — это ступенчатый контакт, который управляет микрошагом двигателя с помощью приема импульсов от Arduino. Точно так же dir настраивает вращение двигателя по часовой стрелке или против часовой стрелки в зависимости от его состояния.
Выходы мотор1, мотор2, мотор3 и мотор 4 подключены к обмоткам шаговых двигателей NEMA 34.

