Существуют три основных типашаговых двигателей:
Двигатели с переменным магнитным сопротивлением;
Двигатели с постоянными магнитами;
Гибридные двигатели.
Определить тип двигателя можно “на ощупь”: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы со щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Двигатели с переменным магнитным сопротивлением.Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 1). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель нечувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
Рис. 1. Двигатель с переменным магнитным сопротивлением
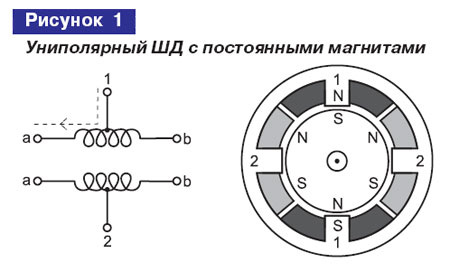
Двигатели с постоянными магнитами.Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 2). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Рис. 2. Двигатель с постоянными магнитами
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 градусов. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 градусов).
Разрез реального шагового двигателя с постоянными магнитами показан на рис. 3.
Рис. 3. Разрез шагового двигателя с постоянными магнитами
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость.
Гибридные двигатели.Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 градуса). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 4).
Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.
Рис. 4. Гибридный шаговый двигатель
Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 и 8 основных полюсов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага двигателя.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1,8 градуса.
Продольное сечение гибридного шагового двигателя показано на рис. 5. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана сплошной черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой черной линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку и поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Рис. 5. Продольный разрез гибридного шагового двигателя
Величина зазора между зубцами ротора и статора очень небольшая – обычно около 100 мкм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться. Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно.
Большинство современных шаговых двигателей являются гибридными. По сути, такой двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3,6 или 1,8 градуса. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим (см. следующую часть работы).
Рис. 6. Биполярный двигатель (а), униполярный (б) и
четырехобмоточный (в)
Биполярные и униполярные шаговые двигатели. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться коммутатором, называемым также драйвером ШД. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двуполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 6, а).Униполярный двигатель (рис. 6, б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема коммутатора, который должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 6, в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности ШД.
Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие потерь в обмотках. Этот факт демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а их сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте около 40%. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
studfiles.net
Базовые характеристики:
Возможно изготовление двигателей с параметрами по спецификации заказчика, в т.ч. в единичных количествах.
| Модель | Шаг,град. | Длина L мм | Напря- жение, В | Сила тока, А | Сопротив- ление обмотки, Ом | Индуктивность обмотки, m/H |
| 57CSTH001 | 1,8 | 41 | 6,0 | 0,5 | 12,0 | 20,0 |
| 57CSTH013 | 1,8 | 41 | 2,7 | 1,5 | 1,8 | 4,0 |
| 57CSTh301 | 1,8 | 51 | 7,2 | 0,6 | 12,0 | 25,0 |
| 57CSTh306 | 1,8 | 51 | 6,6 | 1,0 | 6,6 | 8,2 |
| 57CSTh318 | 1,8 | 51 | 2,6 | 2,0 | 1,3 | 4,0 |
| 57CSTh502 | 1,8 | 56 | 12,0 | 0,6 | 20,0 | 25,0 |
| 57CSTh520 | 1,8 | 56 | 3,6 | 2,0 | 1,8 | 2,5 |
| 57CSTH56-2804A | 1,8 | 56 | 2,1 | 3,0 | 0,7 | 2,5 |
| 57CSTH502 | 1,8 | 67 | 3,4 | 2,0 | 1,7 | 3,0 |
| 57CSTH506 | 1,8 | 67 | 2,4 | 3,0 | 0,8 | 1,0 |
| 57CSTH603 | 1,8 | 78 | 8,6 | 1,0 | 8,6 | 18,0 |
| 57CSTH627 | 1,8 | 78 | 3,2 | 2,8 | 1,13 | 4,4 |
| 57CSTH627 (B)* | 1,8 | 78 | 3,2 | 2,8 | 1,13 | 4,4 |
| 57CSTH633 | 1,8 | 78 | 3,0 | 3,0 | 1,0 | 1,6 |
| 57CSTH800 | 1,8 | 84 | 7,5 | 1,5 | 5,0 | 10,0 |
| 57CSTh215-003 | 1,8 | 115 | 6,3 | 3,0 | 2,1 | 9,0 |
| 57CSTh215-007 | 1,8 | 115 | 4,2 | 4,2 | 1,0 | 2,3 |
| Крутящий момент, кг/см | Кол-во выводов | Инерция ротора г/см2 | Момент инерции г/см | Вес, кг | Диаметр вала мм | Цена руб., c НДС |
| 4,0 | 4 | 120 | 210 | 0,45 | 6,35 | запр. |
| 4,0 | 4 | 120 | 210 | 0,45 | 6,35 | запр. |
| 7,0 | 4 | 275 | 360 | 0,65 | 6,35 | запр. |
| 7,2 | 6 | 275 | 360 | 0,65 | 6,35 | запр. |
| 9,0 | 4 | 275 | 360 | 0,65 | 6,35 | запр. |
| 8,0 | 6 | 300 | 400 | 0,7 | 6,35 | запр. |
| 9,0 | 6 | 300 | 400 | 0,7 | 6,35 | запр. |
| 12,0 | 4 | 300 | 400 | 0,7 | 6,35 | запр. |
| 10,0 | 6 | 360 | 500 | 0,82 | 6,35 | запр. |
| 9,0 | 6 | 360 | 500 | 0,82 | 6,35 | запр. |
| 14,5 | 6 | 480 | 680 | 1,0 | 6,35 | запр. |
| 18,9 | 4 | 480 | 680 | 1,0 | 6,35 | запр. |
| 18,9 | 4 | 480 | 680 | 1,0 | 6,35 | запр. |
| 13,5 | 6 | 480 | 680 | 1,0 | 6,35 | запр. |
| 16,0 | 8 | 530 | 650 | 1,13 | 6,35 | запр. |
| 25,0 | 4 | 810 | 890 | 1,55 | 8 | запр. |
| 19,5 | 8 | 810 | 890 | 1,55 | 8 | запр. |
xn--80aafadcflyh2a1a3dzd5bza.xn--p1ai
Шаговый электродвиигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. Ротор шагового двигателя способен занимать фиксированные положения с относительно высокой точностью без применения обратной связи. Данное обстоятельство позволяет применять шаговые двигатели в устройствах, к которым предъявляются высокие требования по точности перемещения. На рисунке 1 представлена принципиальная схема шагового двигателя. Ротор данного двигателя является постоянным магнитом. На статоре расположены обмотки, последовательная коммутация которых приводит ротор в движение.

Рис.1 Принципиальная схема работы ШД
По принципиальному устройству можно выделить следующие типы шаговых двигателей:

Рис.2 Слева-направо: двигатель с переменным магнитным сопротивлением, с постоянными магнитами, гибридный
Принцип действия шагового двигателя с переменным магнитным сопротивлением заключается в замыкании магнитного потока, создаваемого катушками, находящимися на статоре, через магнитопроводящий ротор. Для реализации данного принципа на статоре и роторе выполнены зубчатые выступы, ротор при этом имеет несколько полюсов. Направление тока в обмотках данного типа двигателей не влияет на работу данного двигателя.
Принцип действия шагового двигателя с постоянными магнитами заключается в использовании в качестве ротора постоянного магнита, который приводится в движение катушками статора. Данный принцип позволяет достигать больших крутящих моментов, чем в двигателях с переменным магнитным сопротивлением. Недостатком шаговых двигателей с постоянными магнитами является возникнование обратной ЭДС на больших скоростях, что ограничивает максимальную скорость.
Гибридные шаговые двигатели - двигатели, принципиальная схема устройства которых объединяет две выше названные - их ротор имеет зубцы и магниты, что позволяет использовать преимущества каждой из схем. Гибридные шаговые двигатели являются наиболее распространённым типом шаговых двигателей, что обусловлено высокими техническими и эксплуатационными характеристиками.
cncmaster.org
Крутящий момент 11 ~ 31 кг×см
Гибридные шаговые двигатели серии FL60STH применяются в упаковочном, фасовочном, этикеровочном оборудовании, робототехнике, рекламном оборудовании (вращающиеся витрины и рекламные стенды), а также в станках с ЧПУ (фрезерные, гравировальные станки). Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели серии FL57STH используются в небольших станках с ЧПУ (фрезерные, гравировальные, серлильные станки), намоточных станках и этикеровочном оборудовании. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели серии FL57STH с шагом 0.9° — квадратные в сечении, при одних и тех же электрических характеристиках выдают на 30% больший крутящий момент, чем двигатели серии FL57ST (круглые в сечении), при одинаковой потребляемой электрической мощности. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели FL42STH с угловым шагом 1.8° применяются в микроманипуляторах отбора проб, устройствах подачи растворов и перемешивающих устройствах в автоматических анализаторах и спектрометрах, а также в банкоматах и светотехническом оборудовании. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели FL42STH с угловым шагом 0.9° применяются в микроманипуляторах отбора проб, устройствах подачи растворов и перемешивающих устройствах в автоматических анализаторах и спектрометрах, а также в банкоматах и светотехническом оборудовании. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели серии FL39ST используются в аналитическом и медицинском оборудовании, измерительных приборах, факсимильных аппаратах, принтерах, копировальных машинах. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели серии FL35ST используются в аналитическом и медицинском оборудовании, факсимильных аппаратах, принтерах, копировальных машинах, лотках подачи и сортировки бумаги. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Гибридные шаговые двигатели серии FL28STH применяются в приборах точной механики и оптики, стрелочных приборах, миниатюрных дозаторах и устройствах автоматической подачи. Читать далее →
Рубрика: Шаговые двигатели FL | Метки: шаговые двигатели, шаговые двигатели FL |Самые малогабаритные из гибридных шаговых двигателей. Применяются в приборах точной механики и оптики, стрелочных приборах и измерительной технике.
Возможно исполнение с длиной вала L = 6.5 мм или L = 15 мм (указывается при заказе). Читать далее →
Рубрика: Шаговые двигатели FL | Метки: малогабаритные, шаговые двигатели, шаговые двигатели FL |Базовые характеристики:
xn--80aafadcflyh2a1a3dzd5bza.xn--p1ai
Базовые характеристики:
Возможно изготовление двигателей с параметрами по спецификации заказчика, в т.ч. в единичных количествах.
| Модель | Шаг,град. | Длина L мм | Напря- жение, В | Сила тока, А | Сопротив- ление обмотки, Ом | Индуктивность обмотки, m/H |
| 85CSTh550D-002 AG3 | 0,6 | 94 | 3,2 | 4,0 | 0,8 | 3,5 |
| 85CSTh550D-002 AG5 | 0,36 | 94 | 3,2 | 4,0 | 0,8 | 3,5 |
| 85CSTh550D-002 AG10 | 0,18 | 94 | 3,2 | 4,0 | 0,8 | 3,5 |
| 85CSTh550D-002 AG20 | 0,09 | 94 | 3,2 | 4,0 | 0,8 | 3,5 |
| 85CSTh550D-002 AG30 | 0,0045 | 94 | 3,2 | 4,0 | 0,8 | 3,5 |
| Крутящий момент, кг/см | Кол-во выводов | Инерция ротора г/см2 | Переда- точное число | Вес, кг | Диаметр вала, мм | Цена руб., c НДС |
| 130 | 8 | 1700 | 3 | 6,0 | 14 | запр. |
| 215 | 8 | 1700 | 5 | 6,0 | 14 | запр. |
| 300 | 8 | 1700 | 10 | 6,0 | 14 | запр. |
| 300 | 8 | 1700 | 20 | 6,0 | 14 | запр. |
| 300 | 8 | 1700 | 30 | 6,0 | 14 | запр. |
Запись опубликована автором denis в рубрике Двухфазные гибридные шаговые двигатели эконом-класса серии CST с метками двухфазные гибридные, с интегрированным редуктором, серия CST, шаговые двигатели, эконом-класс. Добавьте в закладки постоянную ссылку.
xn--80aafadcflyh2a1a3dzd5bza.xn--p1ai
Базовые характеристики:
Допуск углового шага - 5%
Максимально допустимая температура - 80°С
Рабочая температура - -20...+50°С
Сопротивление изоляции - 100МОм мин. 500 VDC
Диэлектрическая прочность - 500 VAC / мин.
Возможно изготовление двигателей с параметрами по спецификации заказчика, в т.ч. в единичных количествах.
Поставка двигателей с двойным валом по запросу.
Модель | Шаг, град. | Длина L мм | Напря- жение, В | Сила тока, А | Сопротив- ление обмотки, Ом | Индуктивность обмотки, m/H | Крутящий момент, кг/см | Кол-во выводов | Инерция ротора г/см2 | Вес, кг | Диаметр вала мм | Цена руб., c НДС |
| 85CSTh550A-001 | 1,8 | 75 | 4,4 | 2,0 | 2,2 | 10,0 | 21,0 | 8 | 1400 | 2,3 | 14 | 2880 |
| 85CSTh550A-002 | 1,8 | 75 | 3,0 | 3,0 | 1,0 | 4,4 | 21,0 | 8 | 1400 | 2,3 | 14 | 2880 |
| 85CSTh550B-002 | 1,8 | 113 | 6,4 | 2,0 | 2,2 | 12,0 | 41,0 | 8 | 2700 | 3,6 | 14 | 3645 |
| 85CSTh550B-004 | 1,8 | 113 | 1,9 | 3,5 | 0,53 | 6,5 | 51,0 | 4 | 2700 | 3,6 | 14 | 3645 |
| 85CSTh550B-004 (B)* | 1,8 | 113 | 1,9 | 3,5 | 0,53 | 6,5 | 51,0 | 4 | 2700 | 3,6 | 14 | 3645 |
| 85CSTh550B-008 | 1,8 | 113 | 2,6 | 6,0 | 0,43 | 2,5 | 41,0 | 8 | 2700 | 3,6 | 14 | 3645 |
| 85CSTh550C-001 | 1,8 | 151 | 7,8 | 2,0 | 3,9 | 20,0 | 64,0 | 8 | 3600 | 5,0 | 14 | 4698 |
| 85CSTh550C-012 | 1,8 | 151 | 5,7 | 3,0 | 1,9 | 22,0 | 93,0 | 4 | 3600 | 5,0 | 14 | 4698 |
| 85CSTh550C-012 (B)* | 1,8 | 151 | 5,7 | 3,0 | 1,9 | 22,0 | 93,0 | 4 | 3600 | 5,0 | 14 | 4698 |
| 85CSTh550D-002 | 1,8 | 94 | 3,2 | 4,0 | 0,8 | 3,5 | 43,0 | 8 | 1700 | 3,0 | 14 | 3523 |
| 85CSTh550D-007 | 1,8 | 94 | 6,4 | 2,0 | 3,2 | 15,0 | 44,0 | 8 | 1700 | 3,0 | 14 | 3523 |
* - с двойным валом. По-умолчанию вал с обратной стороны идентичен валу спереди.
www.aketon.ru