Группа изобретений относится к ракетной технике и может быть применена для многоразовых возвращаемых ракетно-космический систем, способных совершать пилотируемый полет в атмосфере. Возвращаемая ступень ракеты-носителя, содержащая фюзеляж, баки окислителя и горючего, крылья, жидкостный ракетный двигатель (ЖРД) и не менее двух рулевых двигателей, в соответствии с изобретением к фюзеляжу прикреплены два боковых блока, в которых установлены газотурбинные двигатели (ГТД), которые имеют рулевой ракетный двигатель, установленный внутри выхлопного сопла, основную камеру сгорания и вспомогательный газогенератор, соединенный через коллектор смешения с основной камерой сгорания газоводом, а в верхней части боковых блоков выполнены воздухозаборники. В газоводе может быть установлен озонатор. Подвод окислителя и горючего к вспомогательному газогенератору может быть выполнен через дополнительный турбонасосный агрегат (ТНА), в состав которого входит электрогенератор. Озонатор может быть установлен внутри основной камеры сгорания непосредственно перед коллектором смешения. Газотурбинный двигатель содержит перед основной камерой сгорания кольцевой коллектор, с которым соединен газовод, а полость кольцевого коллектора сообщается с воздушным трактом отверстиями или патрубками. Газотурбинный двигатель содержит перед основной камерой сгорания соединенный с газоводом кольцевой перфорированный коллектор, установленный внутри воздушного тракта. Газотурбинный двигатель содержит перед основной камерой сгорания кольцевой коллектор. Газотурбинные двигатели могут быть оборудованы соплом с управляемым вектором тяги. Рассмотрен способ работы возвращаемой ступени ракеты-носителя, включающий ее разгон на активном участке траектории при помощи ЖРД и управление при помощи рулевых двигателей и возвращение при помощи двух ГТД, при этом ГТД запускают в разреженных слоях атмосферы, используя вспомогательные газогенераторы, работающие с избытком окислителя и компенсирующие нехватку атмосферного воздуха для работы ГТД, генераторный газ перед подачей в основную камеру сгорания озонируют, а при полете в плотных слоях атмосферы вспомогательные газогенераторы выключают. Рассмотрен газотурбинный двигатель, содержащий компрессор, основную камеру сгорания, турбину и выхлопное сопло, при этом он содержит рулевой ракетный двигатель, установленный внутри выхлопного сопла, основную камеру сгорания и вспомогательный газогенератор, соединенный газоводом через коллектор смешения с основной камерой сгорания газоводом. В газоводе может быть установлен озонатор. В коллекторе смешения установлен озонатор. В воздушном тракте между компрессором и основной камерой сгорания установлен озонатор. Озонатор может содержит два кольцевых электрода, выполненные коаксиально по обе стороны от коллектора смешения. Изобретение обеспечивает улучшение стартовых характеристик ракеты-носителя и упрощение системы управления по углам тангажа, рыскания и крена и обеспечение ее работоспособности на любых высотах. 3 н. и 14 з.п. ф-лы, 22 ил.
Группа изобретений относится к ракетной технике и может быть применена для многоразовых возвращаемых ракетно-космических систем, способных совершать пилотируемый полет в атмосфере.
В авиакосмической технике известен многоразовый орбитальный корабль «Буран», содержащий фюзеляж, крыло с двумя консолями, левый и правый блоки двигателей управления, размещенные в хвостовой части фюзеляжа, и носовой блок двигателей управления, расположенный в носовой части фюзеляжа (Ю.П. Семенов, Г.Е. Лозино-Лозинский, В.Л. Лапыгин, В.А. Тимченко и др. Многоразовый орбитальный корабль «Буран». М., «Машиностроение», 1995 г., стр. 40, 41, 193). На участке выведения на орбиту орбитальный корабль является полезной нагрузкой для ракеты-носителя (маршевые двигатели на орбитальном корабле «Буран» отсутствуют). После выполнения космического полета орбитальный совершает бездвигательный спуск в атмосфере (воздушно-реактивные двигатели отсутствуют), при этом управление движением орбитального корабля вокруг его центра масс при полете в верхних слоях атмосферы осуществляется с помощью двигателей управления, расположенных в левом и правом блоке двигателей управления хвостовой части фюзеляжа. При этом оси сопел двигателей управления тангажом и креном перпендикулярны продольной оси (оси ОХ) орбитального корабля, образуют углы в 30° с нормальной осью (осью OY) орбитального корабля, а оси сопел двигателей управления рысканием параллельны поперечной оси (оси OZ) орбитального корабля.
Недостатком этого проекта является невозможность использования его компоновки для многоразового ракетного блока. Блоки двигателей управления не могут быть размещены ни в хвостовой, ни в носовой частях фюзеляжа, т.к. в хвостовой части фюзеляжа ракетного блока размещена маршевая двигательная установка первой ступени ракеты-носителя, работающая на участке выведения, а в носовой части фюзеляжа возвращаемого ракетного блока располагаются воздушно-реактивные двигатели, работающие на участке возвращения возвращаемого ракетного блока к аэродрому в районе старта ракеты-носителя. Размещение блоков двигателей управления в средней части фюзеляжа нецелесообразно, т.к. в этом случае двигатели управления будут неэффективны из-за малых величин плеч управляющих сил.
Другим недостатком этого проекта является сильное влияние воздушного потока на газовые струи двигателей управления, в особенности на струи двигателей рыскания, оси сопел которых ориентированы вдоль поперечной оси OZ орбитального корабля перпендикулярно направлению полета. Наконец, еще одним недостатком является влияние силы тяги двигателей рыскания, возникающей при их срабатывании, на величины измеряемой датчиками системы управления поперечной перегрузки и угла скольжения. Двигатели управления неработоспособны в условиях космоса и на больших высотах в разреженной атмосфере, а управляющие моменты на больших высотах небольшие из-за низких тяг газотурбинных двигателей на высоте.
Известна ракета-носитель по патенту РФ на изобретение №2482030, МПК B64G 1/14, опубл 10.05.2013 г.
Эта ракета-носитель содержит соединенный со второй ступенью многоразовый ускоритель с реактивной системой стабилизации, состоящий из ракетного блока с жидкостными ракетными двигателями, соединенного с самолетным комплектом, выполненным в виде планера с крыльями переменной стреловидности с органами аэродинамического управления, соединенного с ракетным блоком по схеме «низкоплан», стабилизатора, шасси, воздушно-реактивных двигателей с их топливным баком, носового отсека, а также содержащая многократно используемые элементы, при этом установленный на ракетном блоке носовой отсек снабжен пилотской кабиной и оснащен управляемыми поворотными козырьками, количество которых равно количеству точек соединения носового отсека со второй ступенью, в местах соединения со второй ступенью в носовом отсеке выполнены карманы, воздушно-реактивные двигатели закреплены на верхних поверхностях крыльев переменной стреловидности и снабжены управляемыми защитными экранами, стабилизатор выполнен в виде двух килей, установленных на крыльях, в ракетном блоке многоразового ускорителя вокруг его продольной оси и симметрично относительно его поперечной оси, параллельной крыльям, установлено четное число дросселируемых ракетных двигателей.
Недостатки: плохие аэродинамические качества ракеты на старте из-за громоздкости фюзеляжа и наличия громоздких крыльев, неработоспособность ГТД в высотных условиях и в космосе при отсутствии воздуха, необходимого для их работы, неуправляемость возвращаемой ступени на больших высотах. Применение громоздких, имеющих большой вес крыльев переменной стреловидности не оправдано из-за того, что единственной задачей создания возвращаемой ступени является ее посадка, а не совершение сложных маневров на дозвуковых и сверхзвуковых скоростях.
Известна ракета-носитель с возвращаемой ступенью по патенту РФ на изобретение №2495799, МПК B64G 1/14, опубл. 20.10.2013 г., прототип устройства и способа.
Эта ракета-носитель содержит многоразовый возвращаемый ракетный блок, содержащий в свою очередь фюзеляж, крыло с двумя консолями, левый и правый блоки газотурбинных двигателей управления, левый и правый блоки двигателей управления размещены в гондолах на законцовках консолей крыла. Кроме того, возвращаемая ступень содержит сопла двигателей управления тангажом и креном и рыскания.
При возвращении ступени газотурбинные двигатели запускают на относительно-небольшой высоте, например 15000…20000 м. Полет до этой высоты полностью неуправляемый.
Недостатком этого технического решения является также низкое аэродинамическое качество фюзеляжа возвращаемой, т.е. первой ступени из-за размещения газотурбинных двигателей на консолях крыльев, которые имеют значительную толщину для передачи реактивной тяги и управляющего момента. Это приводит к неоправданному ухудшению характеристик ракеты-носителя при старте. Кроме того, ракета-носитель имеет очень сложную систему управления по углам тангажа, рыскания и крена.
Задачами создания изобретения являются улучшение стартовых характеристик ракеты-носителя и упрощение системы управления по углам тангажа, рыскания и крена и обеспечение ее работоспособности на любых высотах и обеспечение надежной посадки возвращаемой ступени в любую погоду.
Достигнутые технические результаты - обеспечение работоспособности газотурбинных двигателей на всех высотах и обеспечение посадки возвращаемой ступени.
Решение указанных задач достигнуто в возвращаемой ступени ракеты-носителя, содержащей фюзеляж, баки окислителя и горючего, крылья, и, по меньшей мере, один жидкостный ракетный двигатель, и не менее двух рулевых двигателей, тем, что к фюзеляжу прикреплены два боковых блока, в которых установлены газотурбинные двигатели, которые имеют рулевой ракетный двигатель, установленный внутри выхлопного сопла, основную камеру сгорания и вспомогательный газогенератор, соединенный через коллектор смешения с основной камерой сгорания газоводом, а в верхней части боковых блоков выполнены воздухозаборники. В газоводе может быть установлен озонатор.
Подвод окислителя и горючего к вспомогательному газогенератору может быть выполнен через дополнительный ТНА, в состав которого входит электрогенератор. Озонатор может быть установлен внутри основной камеры сгорания непосредственно перед коллектором смешения. Газотурбинный двигатель может содержать перед основной камерой сгорания кольцевой коллектор, с которым соединен газовод, а полость кольцевого коллектора сообщается с воздушным трактом отверстиями или патрубками. Газотурбинный двигатель может содержать перед основной камерой сгорания соединенный с газоводом кольцевой перфорированный коллектор, установленный внутри воздушного тракта. Газотурбинный двигатель может содержать перед основной камерой сгорания кольцевой коллектор. Основная камера сгорания может содержать, по меньшей мере, одно запальное устройство. Газогенератор может содержать, по меньшей мере, одно запальное устройство. Вспомогательный газогенератор может быть соединен трубопроводами окислителя и горючего с турбонасосным агрегатом, имеющим насосы горючего, окислителя и турбину. Газотурбинные двигатели могут быть оборудованы соплом с управляемым вектором тяги.
Решение указанных задач достигнуто в способе работы возвращаемой ступени ракеты-носителя, включающем ее разгон на активном участке траектории при помощи ЖРД и управление при помощи рулевых двигателей и возвращение при помощи двух ГТД тем, что ГТД запускают в разреженных слоях атмосферы, используя вспомогательные газогенераторы, работающие с избытком окислителя и компенсирующие нехватку атмосферного воздуха для работы ГТД, генераторный газ перед подачей в основную камеру сгорания озонируют, а при полете в плотных слоях атмосферы вспомогательные газогенераторы выключают.
Решение указанных задач достигнуто в газотурбинном двигателе, содержащем компрессор, основную камеру сгорания, турбину и выхлопное сопло тем, что он содержит рулевой ракетный двигатель, установленный внутри выхлопного сопла, основную камеру сгорания и вспомогательный газогенератор, соединенный газоводом через коллектор смешения с основной камерой сгорания газоводом. В газоводе может быть установлен озонатор. В коллекторе смешения установлен озонатор. В воздушном тракте между компрессором и основной камерой сгорания установлен озонатор. Озонатор может содержит два кольцевых электрода, выполненные коаксиально по обе стороны от коллектора смешения.
Сущность изобретения поясняется на фиг. 1…22, где:
- на фиг. 1 приведен внешний вид ракеты-носителя на стартовом столе,
- на фиг. 2 приведен внешний вид возвращаемой 1-й ступени в проекции с нижнего торца, в процессе приземления, вид А,
на фиг. 3 приведен внешний вид возвращаемой 1-й ступени в проекции с нижнего торца, в процессе полета, вид А,
- на фиг. 4 приведен внешний вид четырехкамерного ЖРД,
- на фиг. 5 приведен вид однокамерного ЖРД,
- на фиг. 6 приведен разрез В-В,
- на фиг. 7 приведен разрез С-С,
- на фиг. 8 приведена конструкция маршевого двигателя - ЖРД,
- на фиг. 9 приведен озонатор,
- на фиг. 10 приведен рулевой ракетный двигатель,
- на фиг. 11 приведен вспомогательный ТНА,
- на фиг. 12 приведена конструкция газотурбинного двигателя,
- на фиг. 13 приведена схема подачи компонентов топлива в газотурбинный двигатель,
на фиг. 14 приведена схема подвода газогенераторного газа в основную камеру сгорания, первый вариант,
- на фиг. 15 приведена схема подвода газогенераторного газа в основную камеру сгорания, второй вариант,
- на фиг. 16 приведена схема подвода газогенераторного газа в основную камеру сгорания, третий вариант,
- на фиг. 17 приведена схема подвода газогенераторного газа в основную камеру сгорания, четвертый вариант,
- на фиг. 18 приведена схема подвода газогенераторного газа в основную камеру сгорания, пятый вариант,
- на фиг. 19 приведена схема подвода газогенераторного газа в основную камеру сгорания, шестой вариант,
- на фиг. 20 приведена принципиальная схема газогенератора,
- на фиг. 21 приведен вид С,
- на фиг. 22 приведена система наддува бака окислителя.
Ракета-носитель (фиг. 1…22) может содержать не менее одной ступени. В дальнейшем описание ракеты-носителя составлено на примере двухступенчатой ракеты с одной (первой) возвращаемой ступенью.
РАКЕТА-НОСИТЕЛЬ
Ракета-носитель (фиг. 1…22) содержит возвращаемую ступень 1 с центральным фюзеляжем 2 и соединенные с ней соосно два боковых блока 3, выполненные в одной плоскости.
Возвращаемая ступень 1 содержит прикрепленные к боковым блокам 3 крылья 4, которые выполнены стреловидной формы и установлены в средней части возвращаемой ступени 1. Возвращаемая ступень 1 (фиг. 1 и 2) содержит два комплекта двигательных установок: маршевую, представляющую собой один или несколько жидкостно-ракетных двигателей (сокращенно - ЖРД) - 6 и газотурбинные двигатели 7.
В боковых блоках 3 установлено по одном газотурбинному двигателю 7, внутри которых установлены ракетные рулевые двигатели 8.
Жидкостных ракетных двигателей 6 в возвращаемой ступени 1 может быть установлено или один, или несколько. Возможна установка одного или нескольких четырехкамерных ЖРД 6 (фиг. 3), или несколько однокамерных, например 4 однокамерных ЖРД 6 (фиг. 2-6). Примеры четырехкамерного и однокамерного ЖРД 6 приведены соответственно на фиг. 4 и 5.
Возвращаемая ступень 1 содержит переднее шасси 9 и два задних шасси 10. Переднее шасси 9 в момент старта находится внутри корпуса 2, а задние шасси 10 - в боковых блоках 3 и выпускаются при посадке (фиг. 2 и 3).
Особенностями газотурбинного двигателя 7 являются:
- наличие встроенного в него рулевого ракетного двигателя 8,
- наличие вспомогательного газогенератора 11, который газоводом 12 соединен с газотурбинным двигателем 7 (фиг. 7).
Вспомогательный газогенератор 11 является важным и необходимым элементом ГТД 7 для обеспечения его работоспособности на любых высотах, его конструкция и возможные варианты выполнения описаны ниже. Для питания вспомогательного газогенератора горючим и окислителем предназначен дополнительный ТНА 13 (турбонасосный агрегат). Внутри газовода 12 может быть установлен озонатор 14.
ЖРД 6 (фиг. 8) содержит ТНА 15. ЖРД 6 установлены на силовой раме 16. Внутри центрального фюзеляжа 2 установлены бак окислителя 17 и бак горючего 18 (фиг. 7). К баку окислителя 17 присоединен трубопровод окислителя 19, а к баку горючего 18 - трубопровод горючего 20.
Также в верхней части боковых ступеней 3 выполнены воздухозаборниками 21, соединенными воздушным трактом с входами в ГТД 7 (фиг. 7).
ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ
Жидкостный ракетный двигатель 6 (фиг. 8) содержит камеру сгорания 22 и ТНА 15, подстыкованный к камере сгорания 22 посредством газовода 23. На ТНА 15 установлен газогенератор 24.
ТНА 15 содержит, в свою очередь, турбину 25, насос окислителя 26 и насос горючего 27. Турбонасосный агрегат 15 может содержать дополнительный насос горючего 28. Выход из насоса горючего 27 соединен трубопроводом 29 с входом в дополнительный насос горючего 28 (при его наличии). Камера сгорания 22 содержит головку 30 и сопло 31.
Возможная пневмогидравлическая схема ЖРД приведена также на фиг. 8 и содержит трубопровод горючего 32, подсоединенный одним концом к выходу из насоса горючего 27, содержащим пускоотсечной клапан 33, выход этого трубопровода соединен с главным коллектором 34 камеры сгорания 22. Выход из насоса окислителя 23 трубопроводом окислителя 35, содержащим пускоотсечной клапан окислителя 36, соединен с газогенератором 25. Также выход из дополнительного насоса горючего 27 трубопроводом горючего 37, содержащим пускоотсечной клапан горючего 38 соединен с газогенератором 24. На газогенераторе 24, на камере сгорания 22 установлены, по меньшей мере, по одному запальному устройству 39 и 40 соответственно. Запальные устройства 39 и 40 соединены электрическими связями 41 с энергетическим блоком 42.
Двигатели 6…8 оборудованы блоком управления 43, который электрическими связями 41 соединен с энергетическим блоком 42 и с пускоотсечными клапанами 33, 36 и 38. Особенностью ЖРД 6 является то, что ТНА 15 жестко закреплен на камере сгорания 22.
РАКЕТНЫЕ РУЛЕВЫЕ ДВИГАТЕЛИ
Для управления по углам тангажа, рыскания и крена при старте и в полете ракеты-носителя применяют не менее двух ракетных рулевых двигателей 8 (фиг. 9), установленных в боковых блоках 3. Фактически ракетные рулевые двигатели 8 являются и маршевыми при возвращении возвращаемой ступени 1 на землю в космосе, когда ГТД 7 еще не запущены.
Конструкция и схема питания окислителем и горючим ракетных рулевых двигателей 8 приведена на фиг. 10. Главной особенностью ракетных рулевых двигателей 8 является то, что каждый из них имеет собственный малоразмерный ТНА 44, с присоединенным к нему электрогенератором 45. Электрогенератор 45 предназначен для обеспечения электроэнергией ракеты-носителя на активном участке траектории.
К малоразмерному ТНА 44 присоединены трубопровод окислителя 46 и трубопровод горючего 47. К выходу из малоразмерного ТНА 44 присоединен трубопровод окислителя высокого давления 48 с отсечным клапаном окислителя 49 и трубопровод горючего высокого давления 50 с отсечным клапаном горючего 51.
Ракетный рулевой двигатель 8 закреплен на шарнирной подвеске 52 с возможностью качания в одной плоскости для управления по углам тангажа и крена. По углам рыскания управление ракетой-носителем на активном участке полета осуществляется рассогласованием тяг ракетных рулевых двигателей 8.
Ракетные рулевые двигатели 8 (фиг. 9) имеют собственные запальные устройства 53 для повторного включения при возвращении возвращаемой ступени 1 и используются одновременно как маршевые в вакууме и для управления полетом и стабилизации положения возвращаемой ступени 1 при ее возвращении на землю для повторного использования.
ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ
Газотурбинные двигатели 7 (фиг. 10…12) установлены в боковых блоках 3 и содержат, как упоминалось ранее, озонатор 14.
Озонатор 14, применяемый для значительного улучшения удельных характеристик ГТД 7 (фиг. 10) содержит корпус 54, внутри которого в рабочей камере 55 установлены два металлических электрода 56 и 57, соединенные силовыми связями 41 с электрогенератором 45.
Кроме того, ГТД 7 (фиг. 12) содержит корпус 58, входное устройство 59, компрессор 60, воздушный тракт 61, основную камеру сгорания 62, турбину 63 и реактивное сопло 64. Компрессор 60 содержит направляющие аппараты 65 и рабочие колеса 66, турбина 63 содержит сопловые аппараты 67 и рабочие колеса 68. Компрессор 60 и турбина 63, точнее их рабочие колеса 66 и 68, соединены валом 69. Валов 69 может быть два или три в зависимости от конструкции газотурбинного двигателя 7. Вал 69 установлен на опорах 70 и 71.
Основная камера сгорания 62 (фиг. 12) содержит жаровую трубу 72, форсуночную плиту 73 с топливными форсунками 74 и топливным коллектором 75. Под жаровой трубой 72 установлен внутренний кожух 76, между которым и жаровой трубой 72 выполнен внутренний канал 77. Между жаровой трубой 72 и корпусом 54 выполнен внешний канал 78. Внутренний и внешний каналы 77 и 78 предназначены для ввода воздуха (или газогенераторного газа) из воздушного тракта 67 внутрь жаровой трубы 72 через отверстия 79, выполненные в ней, а также для охлаждения самой жаровой трубы 72.
Газотурбинный двигатель 7 (фиг. 12) имеет систему топливоподачи, содержащую топливопровод низкого давления 80, топливный насос 81, имеющий привод 82, топливопровод высокого давления 83, вход которого соединен с топливным насосом 81, а выход через отсечной клапан 84 соединен с топливным коллектором 75, который соединен с топливными форсунками 74 основной камеры сгорания 62.
Газотурбинный двигатель 7 оборудован системами подачи горючего и окислителя от бака окислителя 17 и бака горючего 18 и дополнительным турбонасосным агрегатом 13. Кроме того, газотурбинный двигатель 7 обязательно оборудован вспомогательным газогенератором 11, который газоводом 12 через озонатор 14 соединен с воздушным трактом 67 до основной камеры сгорания 62.
ДОПОЛНИТЕЛЬНЫЙ ТУРБОНАСОСНЫЙ АГРЕГАТ
Дополнительный турбонасосный агрегат 13 (фиг. 11) входит в состав ГТД 7 и предназначен для его обслуживания, он содержит корпус 85, установленные на валу 86 насос горючего 87, насос окислителя 88, турбину 89 и второй электрогенератор 90. Второй электрогенератор 90 предназначен для питания потребителей электрической энергии возвращаемой ступени 1 и в первую очередь озонатора 14 при посадке возвращаемой ступени 1 на землю. Пилотируемый полет может продолжаться несколько часов.
Более подробно схема подключения дополнительного турбонасосного агрегата в пневмогидросхему ГТД 7 приведена на фиг. 13. Выход из бака окислителя 17 соединен трубопроводом окислителя 19, содержащим клапан окислителя 91 с насосом окислителя 88, а выход из бака горючего 18 трубопроводом горючего 92, содержащим клапан горючего 93, соединен с входом в насос горючего 87. Выход из насоса окислителя 88 трубопроводом высокого давления окислителя 94, содержащим отсечной клапан окислителя 95 соединен с входом в газогенератор 11. Выход из насоса горючего 87 трубопроводом горючего высокого давлении 96, содержащим отсечной клапан 97 и регулятор расхода 98, соединен с входом в вспомогательный газогенератор 11. Выход вспомогательного газогенератора 11 соединен с входом в турбину 89, а выход из турбины 89 газоводом 12 через озонатор 14 соединен с коллектором смешения 99 и с газовыми форсунками 100, установленным в воздушном тракте 67 перед основной камерой сгорания 62.
Организация подвода генераторного газа с избытком окислителя и его активация является важнейшим элементом предложенной конструкции газотурбинного двигателя 7. Возможны несколько вариантов исполнения соединения газовода 12 с воздушным трактом 67 (фиг. 14…19).
На фиг. 14 приведен первый вариант соединения газовода 12 с воздушным трактом 67. На корпусе 58 газотурбинного двигателя 8 в районе воздушного тракта 67 выполнен кольцевой коллектор 101, полость 102 которого отверстиями 103 соединена с воздушным трактом 67 ГТД 7.
На фиг. 15 приведен второй вариант также с кольцевым коллектором 101, полость 102 которого отверстиями 103 сообщается с радиальными патрубками 104, которые перфорированы по всей высоте отверстиями 105 для более равномерного ввода генераторного газа в воздух, проходящий в воздушном тракте 67.
На фиг. 16 приведен третий вариант. По этому варианту в воздушном тракте 67 установлен внутренний кольцевой коллектор 106, имеющий полость 107 и отверстия 108. К внутреннему кольцевому коллектору 106 присоединен газовод 12. Этот вариант обеспечивает более равномерную подачу генераторного газа в основную камеру сгорания 62 ГТД 7. Это необходимо, чтобы обеспечить равномерное температурное поле на входе в турбину 63 и предотвратить местный перегрев деталей рабочих колес 68.
На фиг. 17 приведен четвертый вариант. В газоводе 12 непосредственно перед коллектором смешения 99 установлен озонатор 14. Приближение ионизатора 14 к камере сгорания 62 уменьшает время, потребное для подачи озона в камеру сгорания 62. Это необходимо, потому что время жизни молекул озона ограничено.
На фиг. 18 приведен пятый вариант. В нем совмещены ионизатор 14 и коллектор смешения 99. Электроды 56 и 57 установлены внутри коллектора смешения 99, это дополнительно приближает ионизатор 14 к основной камере сгорания 62.
На фиг. 19 приведен шестой вариант. Озонатор 14 выполнен в воздушной тракте 67 после коллектора смешения 99. Электроды 56 и 57 выполнены концентричными и озонируют не только генераторный газ, но и основной поток воздуха в воздушной тракте 67.
Вспомогательный газогенератор газотурбинного двигателя
Для предложенного газотурбинного двигателя 7 вспомогательный газогенератор 11 может быть специально спроектирован или использован доведенный газогенератор жидкостных ракетных двигателей НК-33. Принципиальная схема вспомогательного газогенератора 11 показана на фиг. 20 и 21. Вспомогательный газогенератор 11 предназначен для сжигания компонентов топлива (горючего и окислителя), при этом один из них является избыточным компонентом, а второй - дополнительным компонентом. Наиболее предпочтительно в качестве горючего использовать керосин, а в качестве окислителя - кислород.
Вспомогательный газогенератор 11 содержит (фиг. 20) головку 109, камеру 110, распределитель окислителя (избыточного компонента) 111, установленный вдоль оси камеры ПО.
Камера 110 содержит две зоны: зону горения 112 и зону смешения 113. Первая из них предназначена для сгорания двух компонентов при оптимальном соотношении, а вторая - для подмешивания окислителя с целью выработки генераторного газа с избытком окислителя для компенсации недостатка воздуха на больших высотах полета.
Головка 109 содержит переднее днище 114 с патрубком подвода горючего 115, среднее днище 116, огневое днище 117, форсунки окислителя 118, форсунки горючего 119. Между передним 114 и средним 116 днищами образована полость 120 для подвода горючего к форсункам горючего 119, а между огневым днищем 117 и средним днищем 116 образована полость 121 для подвода окислителя к форсункам окислителя 118. В среднем днище 116 выполнены пазы 122 для подвода окислителя в полость 121. Камера 110 вспомогательного газогенератора 11 содержит наружный корпус 123 и внутреннюю оболочку 124, между которыми имеется зазор 125 для прохода окислителя. На распределителе окислителя 111 выполнены отверстия 126 для подачи избыточного компонента в зону смешения 113. Вдоль оси камеры 110 выполнен патрубок окислителя 127.
Вспомогательные газогенераторы 11 имеют устройства воспламенения 128 (фиг. 20). Основные камеры сгорания 62 имеют устройства воспламенения 129 (фиг. 14…19).
СИСТЕМА НАДДУВА БАКОВ
Система наддува бака окислителя 17 приведена на фиг. 23 и содержит трубопровод наддува 130 с клапаном наддува 131. Трубопровод наддува 130 присоединен к выходу из вспомогательного газогенератора 11, т.е. наддув осуществляется газогенераторным газом, содержащим 90…95% кислорода. Наддув баков горючего 18 осуществляется гелием. Система наддува бака горючего 18 на фиг. 1…22 не показана.
РАБОТА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ПРИ ЗАПУСКЕ И ВОЗВРАЩЕНИИ ВОЗВРАЩАЕМОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ
При запуске ракеты-носителя одновременно запускают все двигатели: ЖРД 6, рулевые двигатели 8 и газотурбинных двигателей 7. При этом вспомогательные газогенераторы 11, обслуживающие газотурбинные двигатели 7 не работают (фиг. 1).
При выходе ракеты-носителя в разреженные слои атмосферы (на высоте 10…30 км) включают вспомогательные газогенераторы 11 для компенсации недостатка воздуха, поступающего на вход в газотурбинные двигатели 7. Одновременно включают озонаторы 14, в которых кислород частично превращается в озон. Окислительные свойства озона в 80 раз лучше, чем у кислорода, поэтому увеличивается полнота сгорания горючего в основной камере сгорания 62, улучшаются его удельные характеристики и уменьшается расход топлива.
Это является чрезвычайно важным, так как топливо поднимается на орбиту и опускается в плотные слои атмосферы.
При выходе ракеты-носителя в вакуум газотурбинные двигатели 7 выключают. ЖРД 6 продолжают работу до завершения программы полета на активном участке траектории, после чего они выключаются. Рулевые ракетные двигатели 8 используются и как маршевые и для управления в космосе в условиях абсолютного вакуума.
Отсоединяют вышестоящие ступени или полезную нагрузку, после чего включают ракетные рулевые двигатели 8 и направляют возвращаемую ступень 1 к земле. При входе в разреженные слои атмосферы (на высоте от 30 до 10 км) включают газотурбинные двигатели 7 с одновременным включением обслуживающих их вспомогательных газогенераторов 11.
Ракетные рулевые двигатели 8 выключают, чтобы не тратить нерационально компоненты топлива: горючее и окислитель.
Запуск двух ГТД 7 осуществляют путем подачи электроэнергии на стартер от источника энергии (на фиг. 1…22 не показано). Одновременно включают привод 82 топливного насоса 81 (фиг. 20) и топливный насос 81 подает топливо в топливный коллектор 75 основной камеры сгорания 62 и далее через топливные форсунки 74 внутрь жаровой трубы 72, где оно воспламеняется при помощи устройства воспламенения 128. Рабочие колеса 66 турбины 63 раскручиваются и раскручивают через вал 69 рабочие колеса 68 компрессора 60. Реактивное сопло 64 создает тягу.
Практически одновременно или через 20-30 сек запускают вспомогательные газогенераторы 11, обслуживающие ГТД 7. Для этого открывают пускоотсечные клапаны 91 и 93 и подают окислитель и горючее в вспомогательные газогенераторы 11, где воспламеняют при помощи устройства воспламенения 128 (фиг. 9). Газогенераторный газ проходит через турбину 89 и поступает через озонатор 14 и коллектор смешения 99 в газовые форсунки 100 в воздушный тракт 67 перед основной камерой сгорания 62 для компенсации недостатка воздуха, предназначенного для нормальной работы ГТД 7. В этом режиме управление возвращаемой ступенью 1 осуществляют рулевые ракетные двигатели 8.
При переходе возвращаемой ступени 1 в плотные слои атмосферы (на высоте 3…4 км) выключают вспомогательные газогенераторы 11 и ГТД 7 продолжают работать, используя только скоростной напор атмосферного воздуха, поступающего через воздухозаборники 21 (фиг. 7 и 10).
Изменение режима работы газотурбинного двигателя 7 в высотных условиях осуществляется регулятором расхода 98 (фиг. 10), а при полете летательного аппарата, оборудованного таким двигателем в плотных слоях атмосферы при помощи привода 82 насоса 81. Подача горючего и окислителя во вспомогательный газогенератор 11 может быть значительно уменьшена или полностью прекращена.
При переходе первой ступени в более плотные слои атмосферы отключают вспомогательный газогенератор 11, для этого перекрывают отсечные клапаны 91 и 93 и прекращают подачу окислителя и горючего и газотурбинный двигатель 7 переходит на использование в качестве окислителя атмосферного воздуха, что более экономично.
Для управления в полете и частично в режиме возвращения первой ступени 1 ракеты-носителя применяют рассогласование тяги ГТД 7, а для стабилизации передние и задние крылья 4 и 5 (фиг. 1).
Посадка возвращаемой ступени 1 выполняется на взлетно-посадочную полосу ВПП на аэродроме. Для этого выпускают шасси 9 и 10 (фиг. 2). Для окончательного выключения газотурбинного двигателя 7 после посадки первой ступени 1 прекращают подачу топлива в его основную камеру сгорания 62 насосом 81 (фиг. 13).
Естественно, что в случае применения многоступенчатых ракет-носителей возвращаемой может быть выполнена не только первая ступень, но и последующие ступени.
Применение изобретения позволило:
1. Обеспечить надежное возвращение одной или нескольких ступеней ракет-носителей для повторного использования.
2. Обеспечить работоспособность газотурбинного авиационного двигателя на очень больших высотах (более 30000 м и в космосе).
3. Значительно повысить тягу газотурбинного двигателя за счет применения вспомогательного газогенератора и ионизатора.
4. Улучшить надежность запуска газотурбинного двигателя, особенно в высотных условиях за счет использования при запуске горячего газогенераторного газа и устройств воспламенения многократного использования.
4. Обеспечить многоразовость запуска ЖРД и ГТД за счет применения на них многоразовых запальных устройств (электрических или лазерных).
5. Обеспечить управление ракетой-носителем по углам тангажа, рыскания и крена как на активном участке траектории, так и при возвращении.
1. Возвращаемая ступень ракеты-носителя, содержащая фюзеляж, баки окислителя и горючего, крылья и, по меньшей мере, один жидкостный ракетный двигатель, и не менее двух рулевых двигателей, отличающаяся тем, что к фюзеляжу прикреплены два боковых блока, в которых установлены газотурбинные двигатели, которые имеют рулевой ракетный двигатель, установленный внутри выхлопного сопла, основную камеру сгорания и вспомогательный газогенератор, соединенный через коллектор смешения с основной камерой сгорания газоводом, а в верхней части боковых блоков выполнены воздухозаборники.
2. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что в газоводе установлен озонатор.
3. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что подвод окислителя и горючего к вспомогательному газогенератору выполнен через дополнительный ТНА, в состав которого входит электрогенератор.
4. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что озонатор установлен внутри камеры сгорания непосредственно перед коллектором смешения.
5. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что газотурбинный двигатель содержит перед основной камерой сгорания кольцевой коллектор, с которым соединен газовод, а полость кольцевого коллектора сообщается с воздушным трактом отверстиями или патрубками.
6. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что газотурбинный двигатель содержит перед основной камерой сгорания соединенный с газоводом кольцевой перфорированный коллектор, установленный внутри воздушного тракта.
7. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что газотурбинный двигатель содержит перед основной камерой сгорания кольцевой коллектор.
8. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что основная камера сгорания содержит, по меньшей мере, одно запальное устройство.
9. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что газогенератор содержит, по меньшей мере, одно запальное устройство.
10. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что вспомогательный газогенератор соединен трубопроводами окислителя и горючего с турбонасосным агрегатом, имеющим насосы горючего, окислителя и турбину.
11. Возвращаемая ступень ракеты-носителя по п. 1, отличающаяся тем, что газотурбинные двигатели оборудованы соплом с управляемым вектором тяги.
12. Способ работы возвращаемой ступени ракеты-носителя, включающий ее разгон на активном участке траектории при помощи ЖРД и управление при помощи рулевых двигателей и возвращение при помощи двух ГТД, отличающийся тем, что ГТД запускают в разреженных слоях атмосферы, используя вспомогательные газогенераторы, работающие с избытком окислителя и компенсирующие нехватку атмосферного воздуха для работы ГТД, генераторный газ перед подачей в основную камеру сгорания озонируют, а при полете в плотных слоях атмосферы вспомогательные газогенераторы выключают.
13. Газотурбинный двигатель, содержащий компрессор, основную камеру сгорания, турбину и выхлопное сопло, отличающийся тем, что он содержит рулевой ракетный двигатель, установленный внутри выхлопного сопла, основную камеру сгорания и вспомогательный газогенератор, соединенный газоводом через коллектор смешения с основной камерой сгорания газоводом.
14. Газотурбинный двигатель по п. 13, отличающийся тем, что в газоводе установлен озонатор.
15. Газотурбинный двигатель по п. 13, отличающийся тем, что в коллекторе смешения установлен озонатор.
16. Газотурбинный двигатель по п. 13, отличающийся тем, что в воздушном тракте между компрессором и основной камерой сгорания установлен озонатор.
17. Газотурбинный двигатель по п. 13, отличающийся тем, что озонатор содержит два кольцевых электрода, выполненные коаксиально по обе стороны от коллектора смешения.
www.findpatent.ru
Санкт-Петербургское ЗАО «Арсенал-207» – предприятие сравнительно молодое: со дня основания прошло всего 18 лет. Однако его квалифицированный персонал обладает большим багажом знаний и опытом разработки рулевых гидроприводов для управления положением двигателей или сопловых блоков ракетных систем, а также различных гидравлических систем для наземных работ.
За плечами специалистов «Арсенала-207» – опыт создания автономных и централизованных электрогидравлических и газогидравлических рулевых приводов (РП) для ракетной техники, а также создание первых в мире сверхмощных РП с цифровым управлением для ракеты-носителя «Энергия» многоразовой космической системы «Энергия – Буран». Ими были разработаны и созданы РП для твёрдотопливных баллистических ракет стратегического назначения РТ-2П шахтного базирования, РТ-15 на базе подвижной платформы тяжёлого танка (это был альтернативный комплекс, предтеча сегодняшнего «Тополя», рассчитанный на бездорожье) и Р-31 комплекса РО Д-11 морского базирования для атомного подводного крейсера проекта 667АМ. Для РТ-2П и РТ-15 специалисты отдела приводов конструкторского бюро (КБ) «Арсенал», составившие в дальнейшем костяк ЗАО «Арсенал-207», создали четыре наименования автономных электрогидравлических приводов, которых было изготовлено более 200 штук. С их помощью были отработаны сопловые блоки органов управления всех ступеней ракет, в том числе и на огневых стендовых испытаниях. А для ракеты Р-31 арсенальцы создали два типа штатных рулевых приводов – автономные электрогидравлические и централизованные газогидравлические, работавшие от порохового газогенератора. Работы были выполнены на высоком техническом уровне, и Военно-морской флот России получил первую в стране твёрдотопливную ракету, запускаемую на ходу подводной лодки (ПЛ К-140) с глубины 50 м.
В это же время специалисты КБ и завод создали посадочное устройство для «Лунохода-1», которое безупречно выполнило свои функции во время его прилунения.
В 1977 году по приказу Министерства общего машиностроения в КБ «Арсенал» на базе отдела приводов создаётся специальное подразделение 207 для создания мощных цифровых рулевых гидроприводов системы управления вектором тяги ракеты-носителя «Энергия», а также стендового и гидронасосного оборудования для отработки и испытаний РП. По техническому заданию головного разработчика (НПО «Энергия») многоразовой космической системы (МКС) «Энергия – Буран» специалисты этого подразделения «Арсенала» впервые в стране разработали уникальные сверхмощные приводы, развивающие усилие 14 и 35 тс и обладающие высокими статическими и динамическими характеристиками, с не имеющей мировых аналогов цифровой системой управления. На одной РН «Энергия» устанавливалось 40 РП, которые обеспечивали суммарное усилие при управлении положением жидкостных ракетных двигателей (ЖРД) выше 700 тс. Подразделением были разработаны, а заводом «Арсенал» изготовлены универсальные динамические стенды (УДС) для испытаний РП и моделирования эксплуатационных нагрузок, воздействующих на рулевой тракт ракеты во время ее полёта, с целью стендовой отработки системы управления РН.
С 1981 года за десятилетие «Арсеналом» было изготовлено и поставлено заказчику около 400 РП и 16 УДС. Рулевые приводы РП-А и РП-Ц обеспечили два успешных старта РН «Энергия», один из которых – натурные лётные испытания совместно с орбитальным аппаратом в составе МКС «Энергия – Буран». В 1985–1990 годах были разработаны, изготовлены и прошли отработку модернизированные РП новой конструкции для блоков А и Ц. А в последующие годы разработана конструкторская документация (КД) на РП для маршевого трёхкомпонентного ЖРД разработки НПО «Энергомаш» для авиационно-космической системы МАКС НПО «Молния», а также по теме «Морской старт».
С января 2005 года генеральным директором и главным конструктором ЗАО «Арсенал-207» становится один из его акционеров Сергей Владимиров – действительный член Санкт-Петербургской инженерной академии, заслуженный создатель космической техники, ветеран космонавтики. Под его руководством «Арсеналом-207» проведена модернизация РП ЖРД РД170 по существенному улучшению скоростных и динамических характеристик для отработки, сертификации и комплектации ЖРД РД180 и разработана КД на новый РП для ЖРД РД180, которые используются на РН «Атлас» в рамках международного сотрудничества ОАО «НПО „Энергомаш“» с фирмами «Пратт энд Уитни» и «Локхид Мартин» (США). С 2005 года на машиностроительном заводе (МЗ) «Арсенал» изготовлено более 160 новых РП. К середине 2012 года разработанные «Арсеналом-207» и изготовленные МЗ «Арсенал» РП обеспечили 37 успешных стартов РН «Атлас» с РД180, что составляет 37% всех мировых пусков в этом году.
В настоящее время ЗАО «Арсенал-207» ведёт работы по созданию аналоговых и цифровых РП для маршевых ЖРД РД180В и НК-33 для ряда отечественных РН нового поколения, стендового оборудования, гидравлических насосных станций и систем для испытаний и отработки РП и изделий в целом. Ведутся проектные работы по разработке посадочных устройств возвращаемых космических аппаратов.
В кооперации с рядом предприятий авиастроительного комплекса «Арсенал-207» принял участие в разработке и в настоящее время проводит отработку перспективного автономного электрогидростатического РП с электрическим источником энергопитания, представляющего интерес для заказчиков в рамках концепции полностью электрического привода. Этот РП мощностью 20 кВт открывает историю развития нового поколения рулевых приводов для летательных аппаратов. Уход от тяжеловесной и крупногабаритной гидравлики стал возможен благодаря успехам в разработке бесколлекторных двигателей постоянного тока с применением редкоземельных металлов, с мехатронным модулем на вентильных транзисторных преобразователях для управления силовой электроникой и развитым спектром корректирующих обратных связей. Максимальная скорость вращения новых двигателей – более 15 000 об/мин.
Итоговый выигрыш от применения инновации – ощутимая экономия массы ракеты, что очень важно для космических запусков.
ЗАО «Арсенал-207» является ведущим предприятием ракетно-космической отрасли России в области приводостроения, обладающим современной экспериментальной базой и опытными квалифицированными кадрами, способными в короткие сроки и с должным качеством успешно решать задачи по разработке, отработке и изготовлению (совместно с МЗ «Арсенал» и др.) рулевых приводов для управления вектором тяги мощных маршевых ЖРД и РДТТ современных ракет среднего, тяжёлого и сверхтяжёлого класса.
ЗАО «АРСЕНАЛ-207»Санкт-Петербург, 195009, ул. Комсомола, д. 1-3Тел.: +7 (812) 292-49-55Тел./факс: +7 (812) 542-68-05Е-mail: [email protected]://www.arsenal207.ru
dfnc.ru
рулевой ракетный двигатель — raketinis vairo variklis statusas T sritis Gynyba apibrėžtis Pagalbinis raketinis variklis raketos (erdvėlaivio) padėčiai aktyviajame trajektorijos ruože valdyti. Raketa (erdvėlaivis) valdoma sudarant jėgas ir momentus, kurie keičia traukos… … Artilerijos terminų žodynas
Рулевой ракетный двигатель — служит для управления полётом ракеты по заданной программе. На ракете обычно предусматривается 2 или более Р. р. д. небольшой мощности. Боковой момент создаётся поворотом Р. р. д., а при неподвижной их установке рассогласованием тяг… … Большая советская энциклопедия
рулевой жидкостный ракетный двигатель — рулевой ЖРД Жидкостный ракетный двигатель, предназначенный для управления вектором скорости перемещаемого аппарата на активном участке траектории движения. [ГОСТ 17655 89] Тематики двигатели ракетные жидкостные Синонимы рулевой ЖРД … Справочник технического переводчика
Ракетный двигатель (РД) — реактивный двигатель, не использующий для своей работы окружающую среду. Основной тип двигателя в космонавтике. По видам ракетного топлива, энергии и рабочему телу различают химические, ядерные, электрические, газоаккумуляторные и фотонные… … Словарь военных терминов
Стратегический ракетный комплекс 15П699 с МБР РТ-20П (8К99) — 1967 Разработка подвижного грунтового ракетного комплекса, оснащенного межконтинентальной баллистической ракетой (МБР), началась в КБ «Южное» (г. Днепропетровск) в 1964 году. Первый вариант МБР РТ 20(8К99) представлял из себя… … Военная энциклопедия
Стратегический ракетный комплекс Р-16 с ракетой 8К64 (Р-16У/8К64У) — 1961 13 мая 1959 года специальным совместным постановлением ЦК КПСС и Правительства коллективу ОКБ 586 (КБ «Южное») академика М.К. Янгеля поручили разработать межконтинентальную ракету на высококипящих компонентах топлива. Впоследствии… … Военная энциклопедия
Зенитный ракетный комплекс 9К31 «Стрела-1» («Стрела-1м») — Зенитный ракетный комплекс 9К31 «Стрела 1» («Стрела 1м») 1968 Разработка полкового самоходного зенитного ракетного комплекса «Стрела 1» началась 25 августа 1960 г. в соответствии с Постановлением СМ СССР.… … Военная энциклопедия
Точка (тактический ракетный комплекс) — У этого термина существуют и другие значения, см. Точка. Точка индекс ГРАУ 9K79 обозначение НАТО SS 21 Scarab A, по договору РСМД ОТР 21 … Википедия
Медведка (ракетный комплекс) — У этого термина существуют и другие значения, см. Медведка (значения). РПК 9 «Медведка» (по классификации НАТО SS N 29) российский малогабаритный ракетный противолодочный комплекс с противолодочной ракетой 87Р оснащённой… … Википедия
Стратегический ракетный комплекс Р-36М2 «Воевода» (15П018М) с МБР 15А18М — Стратегический ракетный комплекс Р 36М2 «Воевода» (15П018М) с МБР 15А18М 1988 Ракетный комплекс Р 36М2 «Воевода» (15П018М) четвертого поколения с многоцелевой межконтинентальной ракетой тяжелого класса 15А18М разработан в… … Военная энциклопедия
Стратегический ракетный комплекс 15П018 (Р-36М УТТХ) с ракетой 15A18 — 1979 Стратегический ракетный комплекс (РК) третьего поколения 15П018 (Р 36М УТТХ) с ракетой 15A18, оснащенной 10 блочной разделяющейся головной частью (РГЧ), создан в результате реализации программы совершенствования и повышения боевой… … Военная энциклопедия
translate.academic.ru
 Двигатель РД-8 предназначен для создания тяги и управления полетом второй ступени ракеты «Зенит» по всем каналам стабилизации. Автономный рулевой двигатель – четырехкамерный, однорежимный, однократного включения, с турбонасосной подачей топлива. Управление полетом ступени осуществляется качанием каждой камеры двигателя в одной плоскости. Компоненты топлива в камерах и газогенераторе воспламеняются с помощью пускового горючего.
Двигатель РД-8 предназначен для создания тяги и управления полетом второй ступени ракеты «Зенит» по всем каналам стабилизации. Автономный рулевой двигатель – четырехкамерный, однорежимный, однократного включения, с турбонасосной подачей топлива. Управление полетом ступени осуществляется качанием каждой камеры двигателя в одной плоскости. Компоненты топлива в камерах и газогенераторе воспламеняются с помощью пускового горючего.
Двигатель обеспечивает поддержание заданной тяги и регулирование соотношения компонентов топлива. Выполнен по схеме с дожиганием генераторного газа. Рабочее тело турбины ТНА – окислительный газ. При запуске пневмостартер раскручивает ротор ТНА.
Есть возможность модернизации двигателя для двукратного включения в полете и выключения двигателя в случае выработки любого из компонентов топлива. Камера двигателя является базовой для разработки двигателей тягой 2000 и 4000 кгс.
Серийно изготавливается для РКН «Зенит-3SL», «Зенит-3SLБ», «Зенит-2SLБ».
|
Масса двигателя, кг |
380 |
|
Компоненты топлива: - окислитель - горючее |
жидкий кислород керосин |
|
Тяга двигателя в пустоте, кгс |
8000 |
|
Удельный импульс тяги в пустоте, кгс·с/кг |
342 |
|
Массовое соотношение компонентов топлива |
2,4 |
|
Угол отклонения камер, угл. град |
±33 |
|
Время работы в полете, с |
до 1100 |
www.yuzhnoye.com

Представилась возможность оказаться на предприятии где создавались и создаются ракетные двигатели, которые вытягивали почти всю советскую космическую программу, а теперь тянут российскую, украинскую, южнокорейскую и, частично, даже американскую. Знакомьтесь: НПО «Энергомаш», недавно вошедшее в Объединенную ракетно-космическую корпорацию России, место где делают самые лучшие и мощные жидкостные ракетные двигатели в мире.
Эти слова не пафос. Судите сами: здесь, в подмосковных Химках, разработаны двигатели для советско-российских ракет «Союз» и «Протон»; для российской «Ангары»; для советско-украинских «Зенита» и «Днепра»; для южнокорейской KSLV-1 и для американской ракеты Atlas-5. Но обо всем по порядку…
После проверки паспорта и прибытия сопровождающего, с проходной выдвигаемся в музей завода, или как тут его называют «Демонстрационный зал».

Хранитель зала Владимир Судаков — начальник Отдела информации. Судя по всему, с обязанностями он справляется неплохо — он один из всех моих собеседников знал кто такой «Zelenyikot».

Владимир провел короткую, но емкую экскурсию в музее.

Видите на столе 7 сантиметровую пшикалку? Вот с нее вырос весь советский и российский космос.
НПО «Энергомаш» развился из небольшой группы энтузиастов ракетостроения, сформированной в 1921 году, а в 1929-м названной Газодинамическая лаборатория, руководителем там был Валентин Петрович Глушко, позже он же стал генеральным конструктором НПО «Энергомаш».
Диск со сферой в центре — это не модель Солнечной системы, как я подумал, а макет электроракетного космического корабля. На диске предполагалось размещать солнечные батареи. На дальнем плане — первые модели жидкостных ракетных двигателей разработки ГДЛ.
За первыми концептами 20-30-х гг. пошли реальные работы на госфинансировании. Тут ГДЛ работало уже вместе с Королевским ГИРД. В военное время в «шарашке» разрабатывали ракетные ускорители для серийных военных самолетов. Создали целую линейку двигателей, и полагали, что являются одними из мировых лидеров жидкостного двигателестроения.
Но всю погоду испортили немцы, которые создали первую баллистическую ракету А4, более известную в России под названием «Фау-2».
Ее двигатель более чем на порядок превосходил советские разработки (25 тонн против 900 кг), и после войны инженеры принялись наверстывать упущенное.
Сначала создали полную реплику А4 под названием Р-1, но с использованием полностью советских материалов. На этом периоде нашим инженерам еще помогали немецкие. Но к секретным разработкам их старались не подпускать, поэтому дальше наши работали сами.

Первым делом инженеры принялись форсировать и облегчать немецкую конструкцию, и добились в этом немалых успехов — тяга повысилась до 51 тс.

Но дальше возникли проблемы нестабильности горения топлива в большей сферической камере сгорания. Глушко понял, что это тупик и занялся разработкой двигателей с цилиндрической камерой.

На этом поприще он преуспел. В руках хранителя музея — первый рабочий прототип, подтвердивший верность выбранной схемы. Что самое удивительное — внутренняя часть камеры сгорания — медный сплав. Кажется, что элемент где давление превышает сотни атмосфер, а температура — тысячу градусов Цельсия, надо делать из какого-нибудь тугоплавкого титана или вольфрама. Но оказалось камеру проще охлаждать, а не добиваться неограниченной термостойкости. Камера охлаждалась жидкими компонентами топлива, а медь использовалась из-за своей высокой теплопроводности.
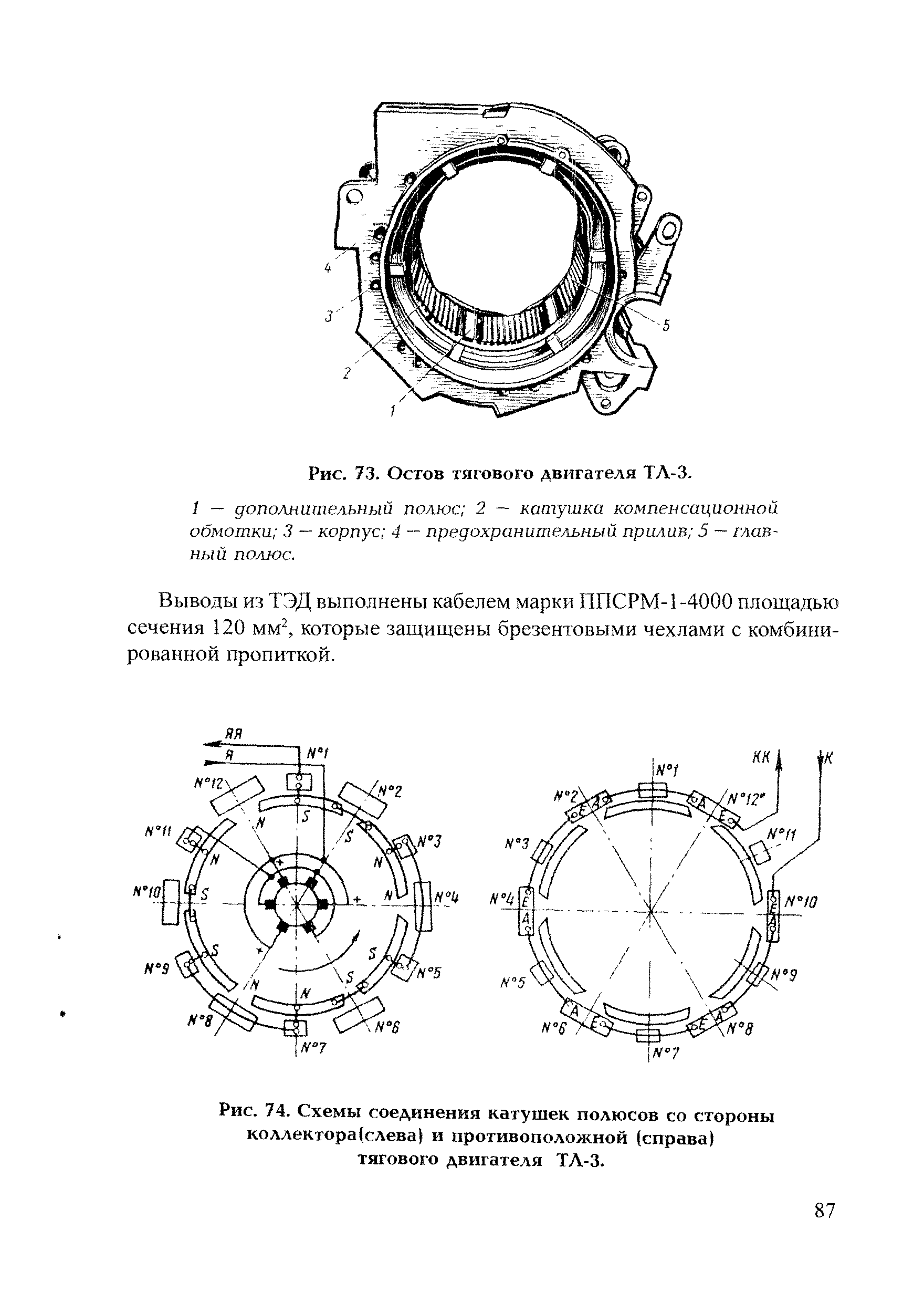
Первые разработки с новым типом камеры сгорания были военные. В демонстрационном зале они запрятаны в самый дальний и темный угол. А на свету — гордость — двигатели РД-107 и РД-108, которые обеспечили Советскому Союзу первенство в космосе, и позволяют России лидировать в пилотируемой космонавтике по сей день.

Владимир Судаков показывает рулевые камеры — дополнительные ракетные двигатели, которые позволяют управлять полетом.

В дальнейших разработках от подобной конструкции отказалось — решили просто отклонять маршевую камеру двигателя целиком.
Проблемы с нестабильностью горения в больших камерах до конца решить так и не удалось, поэтому большинство двигателей конструкции КБ Глушко — многокамерные.

В зале имеется только один однокамерный гигант, который разрабатывался для лунной программы, но в серию так и не пошел — победил конкурирующий вариант НК-33 для ракеты Н1.

Разница их в том, что Н1 запускали на смеси кислород-керосин, а Глушко был готов запускать людей на диметилгидразине-тетраоксиде азота. Такая смесь эффективнее, но намного токсичнее керосина. В России на ней летает только грузовой «Протон». Впрочем, это ни сколь не мешает Китаю сейчас запускать своих тайконавтов именно на такой смеси.
Можно взглянуть и на двигатель «Протона».

А двигатель для баллистической ракеты Р-36М, до сих пор стоит на боевом дежурстве в ракетах «Воевода», широко известных под натовским названием «Сатана».

Впрочем, сейчас их, под названием «Днепр» тоже запускают с мирными целями.
Наконец добираемся до жемчужины КБ Глушко и гордости НПО «Энергомаш» — двигателю РД-170/171.

На сегодняшний день — это самый мощный кислород-керосиновый двигатель в мире — тяга 800 тс. Превосходит американский лунный F-1 на 100 тс, но достигает этого за счет четырех камер сгорания, против одной у F-1.
РД-170 разрабатывался для проекта «Энергия-Буран», в качестве двигателей боковых ускорителей. По первоначальному проекту предполагалось многоразовость ускорителей, поэтому двигатели были разработаны и сертифицированы для десятикратного использования. К сожалению, возврат ускорителей так и не был реализован, но двигатели сохраняют свои возможности. После закрытия программы «Буран», РД-170 повезло больше чем лунному F-1 — ему нашли более утилитарное применение в ракете «Зенит». В советское время ее, так же как и «Воеводу» разрабатывало КБ «Южное», которое после развала СССР оказалось за границей. Но в 90-е политика не помешала российско-украинскому сотрудничеству, а к 1995 году, совместно с США и Норвегией начал реализовываться проект «Морской старт». Хотя он так и не вышел на прибыльность, прошел реорганизацию и сейчас решается его дальнейшая судьба, но ракеты летали и заказы на двигатели поддерживали «Энергомаш» в годы космического безденежья 90-х- начала 2000-х.
Владимир Судаков демонстрирует фантастическую разработку инженеров «Энергомаша» — составной сильфон узла качания двигателя.

Как добиться подвижности узла при высоких давлениях и экстремальных температурах? Да фигня вопрос: всего лишь 12 слоев металла и дополнительные кольца бронирования, зальем меж слоев жидким кислородом и нет проблем…
Такая конструкция позволяет жестко закрепить двигатель, но управлять полетом отклонением камеры сгорания и сопла, при помощи карданного подвеса. На двигателе он виден чуть ниже и правее центра, над панелью с красными заглушками.

Американцы про свой космос любят повторять «Мы стоим на плечах гигантов». Глядя на такие творения советских инженеров понимаешь, что эта фраза всецело относится и к российской космонавтике. Та же «Ангара» хоть и детище уже российских конструкторов, но ее двигатель — РД-191 эволюционно восходит к РД-171.

Точно так же «половинка» РД-171, под названием РД-180 внесла свой вклад, и в американскую космонавтику, когда «Энергомаш» в 1995 году победил в конкурсе Lockheed Martin. Я спрашивал, не было ли в этой победе пропагандистского элемента — могли ли американцы заключить контракт с русскими, для демонстрации завершения эры соперничества и начала сотрудничества в космосе. Мне не ответили, но рассказали про офигевшие глаза американских заказчиков, когда они увидели творения сумрачного химкинского гения. По слухам, характеристики РД-180 почти вдвое превышали характеристики конкурентов. Причина в том, что в США так и не освоили ракетные двигатели с закрытым циклом. В принципе, можно и без него, тот же F-1 был с открытым циклом или Merlin от SpaceX. Но в соотношении «мощность/масса» двигатели закрытого цикла выигрывают, хоть и проигрывают в цене.
Вот тут на видео испытаний двигателя Merlin-1D видно как из трубки рядом с соплом хлещет струя генераторного газа:
В замкнутом цикле этот газ возвращается в камеру сгорания, что позволяет более эффективно использовать топливо. В музее отдельно установлен ротор бустерного насосного агрегата окислителя. Подобные роторы еще не единожды будут нам встречаться на экскурсии по НПО «Энергомаш».

Наконец, завершение экспозиции — надежда предприятия — двигатель РД-191. Это пока самая младшая модель семейства. Он создавался для ракеты «Ангара», успел поработать в корейской KSLV-1, и его рассматривает в качестве одного из вариантов американская компания Orbital Scienses, которой понадобилась замена самарского НК-33 после аварии ракеты Antares в октябре.

На заводе эту троицу РД-170, РД-180, РД-191 в шутку называют «литр», «поллитра» и «четвертинка».

Ух, что-то объемная получилась экскурсия. Давайте осмотр завода отложим на следующий день. Там тоже много интересного, а главное получилось увидеть, как такое чудо инженерной мысли создается из кучи стальных и алюминиевых болванок

Другие статьи:
nlo-mir.ru
Изобретение относится к рулевым приводам многоступенчатых ракет. Привод рулевой содержит рулевые машины, систему питания рулевых машин, узлы развязки, кронштейны для закрепления рулевых машин к днищу ракеты. Узлы развязки закреплены к соплу двигателя. Сопло с помощью опор зафиксировано относительно корпуса ракеты. Узел развязки состоит из корпуса, качалки, фиксатора, пружины, опорной оси. Техническим результатом изобретения является повышение точности фиксации рулевых машин в нулевом положении и повышение жесткости в передаче системы рулевая машина - сопло двигателя. 4 ил.
Изобретение относится к ракетной технике и может быть использовано в приводах рулевых ракет с жидкостным ракетным двигателем для второй и верхних ступеней, у которых двигатель и привод рулевой размещены в баке с компонентом топлива предыдущей ступени.
Известен привод рулевой второй ступени, который размещен в баке окислителя первой ступени. См. «Морские стратегические ракетные комплексы», стр. 101. Издательство ООО «Военный Парад» - ОАО «ГРЦ Макеева», 2011 год, Москва. Этот привод рулевой ампулизированный, так как находится в агрессивной среде. Все стыки рулевых машин с системой питания выполнены неразъемными, сварными. Электрические кабели к рулевым машинам подведены в металлических трубах, а трубы приварены к элементам конструкции. Рулевые машины хвостовиками закреплены шарнирно к днищу корпуса ракеты, а штоками закреплены к качалкам узлов развязки через шарнирные подшипники. Корпуса узлов развязки закреплены к соплу двигателя. Жидкостной ракетный двигатель установлен на карданном подвесе, который закреплен на днище. Узел развязки представляет из себя корпус с пазом, в пазу на оси установлена качалка. Качалка выполнена в виде двухплечевого рычага с отверстиями, а на корпусе узла развязки установлена соосно с отверстием на качалке опорная ось, при этом диаметр отверстия на качалке выполнен больше диаметра оси на расчетный угол качания. На наружном периметре качалки выполнены профилированные выемки, а на корпусе узла развязки перпендикулярно к качалке установлены подпружиненные храповики, прижатые к качалке. При отклонении качалки на заданный расчетный угол или на опорную ось храповик входит в профилированную поверхность на качалке и заклинивает качалку относительно корпуса узла развязки, тем самым обеспечивается жесткая кинематическая связь между штоком рулевой машины и соплом двигателя.
Недостатками прототипа является:
1. Большой угол холостого отклонения качалки для обеспечения жесткой механической связи между штоком рулевой машины и соплом двигателя, что снижает точность установки нулевого положения рулевой машины.
2. В зацеплении храповика с качалкой возникают большие удельные давления ввиду линейного контакта храповика с качалкой. Это обусловлено особенностью конструкции храпового механизма.
Несмотря на указанные недостатки, вышеописанный привод рулевой принят в качестве прототипа.
Задачей, на решение которой направлено изобретение, является достижение технического эффекта за счет уменьшения холостого угла отклонения качалки до фиксации с храповиком и уменьшение удельного давления в месте контакта храповика с качалкой. Этот технический эффект достигается тем, что на корпусе узла развязки перпендикулярно к качалке установлен подпружиненный фиксатор, который при отклонении качалки на опорную ось входит в отверстие на качалке, выполненное соосно с отверстием на корпусе, обеспечивая жесткую кинематическую связь между штоком рулевой машины и соплом двигателя ракеты.
Сущность изобретения поясняется графическими материалами.
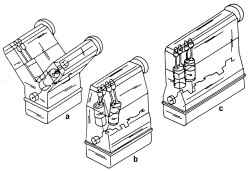
На фиг. 1 представлен привод рулевой в составе отсека ракеты. Привод рулевой состоит из рулевых машин 1, системы питания рулевых машин 2, узлов развязки 3, кронштейнов 4, закрепленных на днище 15. На фиг. 2 и 3 показан узел развязки 3, который состоит из корпуса 5, качалки 6, фиксатора 7, пружины 8, оси 9, опорной оси 10, кожуха 11. Корпус 5 узла развязки 3 закреплен к соплу 12 двигателя, а качалка 6 соединена со штоком рулевой машины 1 с помощью шарнирных подшипников. На фиг. 3 показан узел развязки 3, в положении, когда фиксатор 7 оперт на качалку 6. При этом качалка 6 может поворачиваться относительно оси 9 на расчетный рабочий угол, не опираясь на опорную ось 10. На фиг. 4 показан узел развязки 3 в положении, когда качалка повернута на опорную ось 10 и фиксатор 7 под действием пружины 8 вошел в отверстие на качалке 6. При этом фиксатор 7 соединяет качалку 6 с корпусом 5, обеспечивая жесткую кинематическую связь между штоком рулевой машины и соплом двигателя ракеты.
Предлагаемый привод рулевой работает следующим образом. При хранении, транспортировке и перегрузках ракеты узлы развязки 3 на рулевом приводе находятся в положении, как показано на фиг. 3. Жесткая кинематическая связь между рулевой машиной 1 и соплом 12 двигателя отсутствует, при этом мембрана и шток рулевой машины 1 не нагружаются. Силы, нагружающие шток и мембрану рулевой машины 1, могли бы возникнуть при перегрузках ракеты, когда появляется прогиб корпуса ракеты, а сопло 12 двигателя закреплено к корпусу ракеты 14 опорами 13. Все возникающие перемещения сопла 12 компенсируются узлом развязки 3, так как фиксатор 7 оперт на качалку 6, которая может свободно поворачиваться в пределах заданного расчетного угла.
При работе рулевого привода, когда происходит разделение ступеней и запускается двигатель, рабочая жидкость от турбонасосного агрегата двигателя ракеты под давлением поступает в систему питания рулевых машин 2. Далее рабочая жидкость поступает на вход рулевых машин 1. Шток рулевой машины 1 по команде от системы управления ракеты выдвигается. При этом разрушается мембрана ампулизации на рулевой машине 1, а качалка 6 поворачивается относительно оси 9 до упора на опорную ось 10 и фиксатор 7 под действием пружины 8 входит в отверстие качалки 6, как показано на фиг. 4. Происходит соединение качалки 6 с корпусом 5 узла развязки и обеспечивается жесткая кинематическая связь между штоком рулевой машины и соплом двигателя ракеты.
Техническим результатом предлагаемого изобретения является улучшение точности фиксации рулевых машин в нулевом положении и повышение жесткости в передаче системы рулевая машина-сопло двигателя.
Привод рулевой для управления вектором тяги жидкостного ракетного двигателя, содержащий систему питания рулевых машин, ампулизированные рулевые машины, кронштейны для закрепления элементов рулевого привода, при этом между камерой сгорания двигателя ракеты и рулевой машиной установлен узел развязки, который выполнен в виде корпуса с пазом, внутри паза на одной оси закреплена качалка, другая опорная ось на корпусе закреплена неподвижно и качалка относительно опорной оси может качаться в пределах зазора между осью и отверстием на качалке, выполненным больше диаметра оси, обеспечивающим ее расчетный угол качания, отличающийся тем, что на кронштейне ближе к наружному периметру качалки, перпендикулярно к качалке установлен подпружиненный фиксатор, который при отклонении качалки на опорную ось входит в отверстие на качалке, выполненное соосно с отверстием на кронштейне, обеспечивая жесткую кинематическую связь между штоком рулевой машины и соплом двигателя ракеты.
www.findpatent.ru
Газовый руль ракетного двигателя, содержащий перо, тарель и вал, снабжен кожухом, охватывающим перо с зазором и закрепленным на тарели. Кожух выполнен из легкоплавкого и легко деформируемого материала, например полистирола. На наружную поверхность кожуха нанесен слой клея холодного отверждения. Изобретение повысит надежность конструкции рулей, двигателя и ракеты в целом. 2 ил.
Изобретение относится к ракетной технике и может быть использовано при создании ракетных твердотопливных двигателей, управляемых с помощью газовых рулей по командам системы управления ракеты.
В процессе хранения и дежурства на позиции система управления ракеты систематически проходит технический осмотр и проверку функционирования, включая прокачку газовых рулей. Работы проводятся обслуживающим персоналом, проходящим срочную службу. Результаты осмотра и проверок вносятся в паспорт (формуляр) ракеты. Проведение таких работ не исключает возможность случайного соударения с пером и тарелью газового руля с образованием трещин и микротрещин, которые визуально выявить в условиях позиции без специальных рентгеновских установок практически невозможно. Причем уровень и качество проверок могут снижаться из-за того, что обслуживающий персонал из состава специалистов срочной службы за период эксплуатации ракеты меняется несколько раз. Поэтому газовые рули должны быть защищены от случайных механических повреждений.
Известен газовый руль по патенту США №3251555, содержащий перо, тарель, вал. Газовый руль установлен в закритической части сопла. Известен газовый руль, закрепленный на срезе сопла, содержащий перо, тарель, вал (см. книгу "Конструкция ракетных двигателей на твердом топливе" под редакцией Л.Н.Лаврова, - М., Машиностроение, 1992 г., стр.145), который выбран в качестве прототипа. Недостатком известных конструкций газового руля является отсутствие в них средств защиты пера и тарели от случайного механического повреждения при технических осмотрах ракеты, что снижает надежность конструкции рулей и двигателя в целом.
Технической задачей изобретения является устранение отмеченного недостатка.
Технический результат достигается тем, что газовый руль ракетного двигателя, содержащий перо, тарель, вал, снабжен кожухом, охватывающим перо с зазором и закрепленным на тарели, причем кожух выполнен из легкоплавкого и легко деформируемого материала, например полистирола, и на его наружную поверхность нанесен слой клея холодного отверждения.
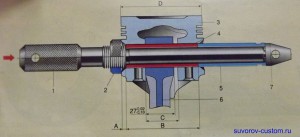
На фиг.1, 2 показана конструкция газового руля.
Газовый руль содержит перо 1, тарель 2, вал 3. Кожух 4 на поверхности 5 закреплен на тарели 2 с помощью, например, клея (на наружную поверхность кожуха 1 наносится клей 6).
Поступающие на сборку газового руля детали проходят входной контроль согласно карте входного контроля.
Сборка производится в последовательности:
- соединение пера 1 и тарели 2 с валом 3;
- проверка зазоров δ и контакта по поверхности 5 между пером 1, тарелью 2 и кожухом 4;
- установка кожуха 4 на клей по поверхности 5;
- нанесение на поверхность кожуха 4 клея 6.
Наличие зазора δ между стенкой кожуха и пером увеличивает чувствительность кожуха 4 к механическим воздействиям за счет образовавшейся консоли стенки кожуха относительно тарели. При механическом воздействии на кожух в первую очередь образуются трещины в клеевом наружном слое. Анализ трещин и вмятин (при их наличии) позволяет оценить силу воздействия на кожух и возможные последствия для пера, тарели и принять решение по дальнейшей эксплуатации.
При работе (пуске) ракеты кожух 4 от воздействия сверхзвукового высокотемпературного газового потока разрушается и выносится потоком из проточной части сопла, не оказывая влияния на работоспособность и газодинамические характеристики газового руля.
Таким образом, реализация представленного технического решения повышает надежность конструкции рулей, двигателя и ракеты в целом.
Газовый руль ракетного двигателя, содержащий перо, тарель, вал, отличающийся тем, что он снабжен кожухом, охватывающим перо с зазором и закрепленным на тарели, причем кожух выполнен из легкоплавкого и легко деформируемого материала, например полистирола, и на его наружную поверхность нанесен слой клея холодного отверждения.
www.findpatent.ru