Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать - момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
220v.guru
Содержание:
На сегодняшний день практически все современные электроинструменты оснащены коллекторными двигателями. Они относятся к более универсальным конструкциям, поскольку могут работать не только при переменном, но и при постоянном напряжении. Однако данный тип электродвигателей обладает высокой частотой оборотов, которая не всегда требуется в рабочих процессах. В подобных ситуациях изменить частоту вращения и обеспечить плавный пуск поможет регулятор оборотов коллекторного двигателя, способный создавать наиболее оптимальные скоростные режимы.
Современная бытовая техника и электроинструменты укомплектованы коллекторными и асинхронными электродвигателями. В самых современных устройствах второй вариант практически не применяется, поэтому более подробно следует рассматривать электродвигатели коллекторного типа.
Эти устройства отличаются компактностью, простотой управления и повышенной мощностью. Принцип действия такой же, как и у всех электродвигателей, основанный на вращении прямоугольной рамки, помещенной между магнитными полюсами, и по которой пропущен электрический ток.
В коллекторных двигателях функцию вращающейся рамки выполняют скользящие контакты, к которым также подводится ток. После поворота рамки на 1800 ток начинает течь по этим контактам в обратном направлении. Сама рамка будет вращаться в прежнем напрявлении, при этом плавного вращения она не обеспечивает. Для того чтобы вращение было плавным, в конструкции двигателя используется большое количество этих рамок.
В состав агрегата входят следующие элементы:
Статор может состоять не только из одного, но и из двух магнитов, соответственно, с двумя парами полюсов. В отдельных конструкциях используются не статические магниты, а электромагнитные катушки. Скорость двигателя регулируется очень просто – всего лишь путем изменения величины подаваемого напряжения. Ось вращения соединяется с рабочей частью напрямую, без каких-либо промежуточных элементов.
Регулирующее устройство по своей сути является частотным преобразователем. Схема регулятора оборотов создана на основе мощного транзистора, с помощью которого инвертируется напряжение, обеспечивается плавная остановка и пуск.
Все необходимые действия осуществляются посредством ШИМ – широтно-импульсного модулятора, управляющего электрическими устройствами. С его помощью создаются синусоиды заданной конфигурации для постоянного и переменного тока.
За счет установленных частотных преобразователей, регулятор оборотов коллекторного электродвигателя способен точно контролировать необходимые электрические процессы. В результате, скорость вращения может быть изменена в сторону увеличения или уменьшения, обороты поддерживаются на установленном уровне, а сам инструмент оказывается защищенным от резких перепадов оборотов.
Электродвигатель использует только то количество электроэнергии, которое необходимо для выполнения работы. Экономия потребления электричества достигает до 50% при снижении скорости вращения всего лишь на 20%.
Работа регулятора оборотов коллекторного двигателя происходит следующим образом.
После запуска агрегата на полной мощности, электрическому току приходится преодолевать сопротивление полной нагрузки, повторяющееся несколько раз. Под действием тока обмотки двигателя деформируются и начинают выделять тепло в течение продолжительного времени. Это приводит к существенному снижению ресурса и движок становится менее долговечным.
Таким образом, регулятор выполняет функцию ступенчатого инвертора, осуществляющего двойное преобразование энергии.
Частотный регулятор напряжения выпрямляет ток на 220 В или 380 вольт, в зависимости от входного напряжения. Для этих целей используется выпрямляющий диод, расположенный на входе. После этого ток фильтруется через конденсаторы, далее происходит формирование широтно-импульсной модуляции. В конечном итоге после регулировки система оказывается подготовленной к созданию необходимой конфигурации синусоиды.
Выбирать необходимое регулировочное устройство следует в соответствии с его техническими характеристиками и сферой использования.
Для выбора существуют следующие критерии:
Простейшее устройство, которое может быть собрано своими руками, представляет собой печатную плату, размером 50х50 мм. Для ее изготовления лучше всего подходит односторонний стеклотекстолит.
Схема дополняется двумя резисторами по 45 Ом, что дает возможность подключать обычный компьютерный вентилятор. В случае использования повышенной нагрузки схема блокируется демпферным диодом, рассчитанным на удвоенное значение тока нагрузки и питающего напряжения.
При отсутствии такого диода возможен перегрев всего устройства. Кроме того, сам элемент размещается на теплоотводе, представляющем собой металлическую пластину. Работа регулирующих ключей обеспечивает минимальные потери мощности.
electric-220.ru
Нужно это устройство для управления мотором модели. Их покупают для апгрейда моделей (подойдет например для популярных моделек Wltoys 10428 и 12428) и для оснащения шасси самодельного проекта.
Коробка: Характеристики:
Бренд: GoolRC
Подходит для: лодок и машин 1/10
Водозащита
Защиты от: КЗ, перегрева, пониженного напряжения аккумулятора, потери сигнала управления
Ток: 40 A вперед, 20 А назад
Мотор: 280, 370, 380, 540 или 550 размер
Максимальные обороты: <30000 об/мин
Максимальный ток: 180A
Питание: 2~3S LiPo, 5~9S NiMh аккумуляторыBEC: 6 В/1 A
Размеры: 45 * 30 * 28 мм (без кабелей)
Силовой разъем:
Масса: 67 г
Комплектация:
Характеристики:
Бренд: GoolRC
Подходит для: лодок и машин 1/10
Водозащита
Защиты от: КЗ, перегрева, пониженного напряжения аккумулятора, потери сигнала управления
Ток: 40 A вперед, 20 А назад
Мотор: 280, 370, 380, 540 или 550 размер
Максимальные обороты: <30000 об/мин
Максимальный ток: 180A
Питание: 2~3S LiPo, 5~9S NiMh аккумуляторыBEC: 6 В/1 A
Размеры: 45 * 30 * 28 мм (без кабелей)
Силовой разъем:
Масса: 67 г
Комплектация: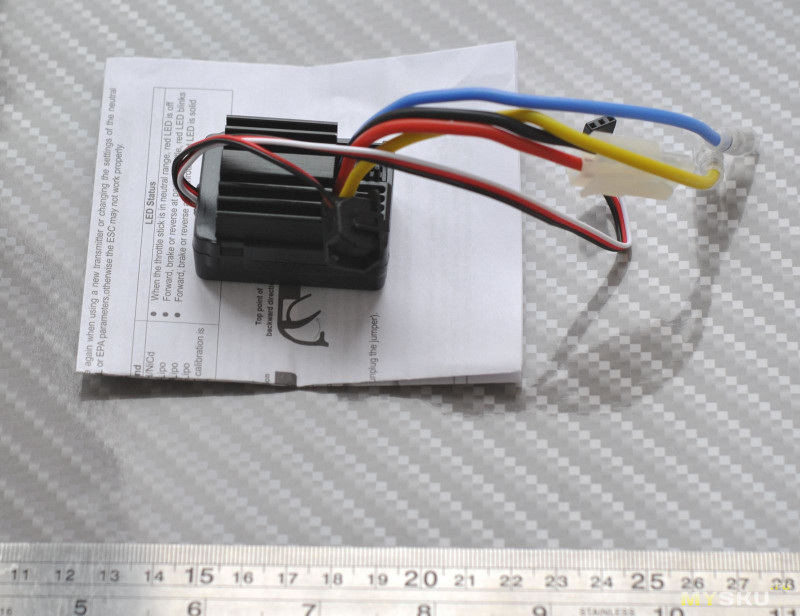 Регулятор и инструкция, просто и лаконично.
Регулятор и инструкция, просто и лаконично.
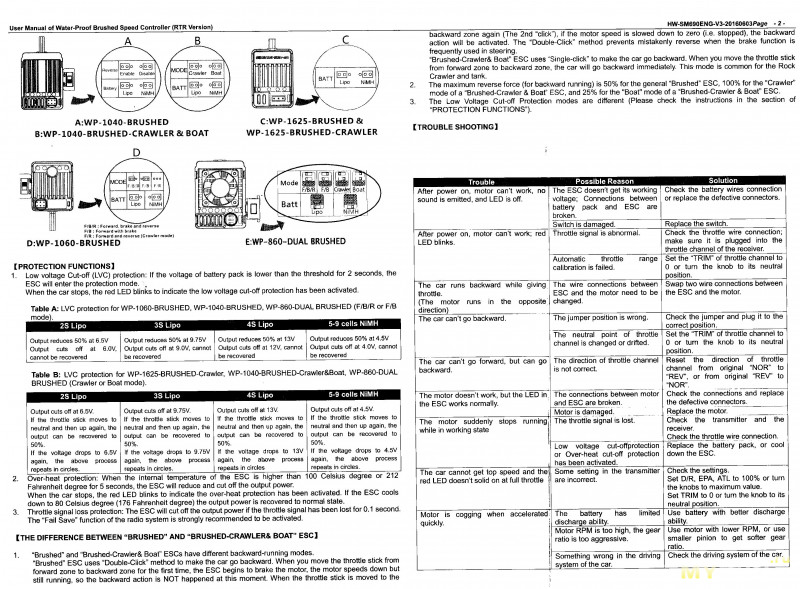
Инструкция
 Внешний вид устройства:
Внешний вид устройства: Обращает на себя внимание надпись «waterproof» — т.е. водозащита. Регулятор управляется двумя перемычками: 1я — выбирает режим работы (вездеход или лодка), 2я — устанавливает тип аккумулятора литий или NiMh. Из кабелей у нас: силовой разъем на аккум типа tamiya, кабели для подключения двигателя (желтый +), вынесенный выключатель и стандартный разъем в приемник.
Обращает на себя внимание надпись «waterproof» — т.е. водозащита. Регулятор управляется двумя перемычками: 1я — выбирает режим работы (вездеход или лодка), 2я — устанавливает тип аккумулятора литий или NiMh. Из кабелей у нас: силовой разъем на аккум типа tamiya, кабели для подключения двигателя (желтый +), вынесенный выключатель и стандартный разъем в приемник.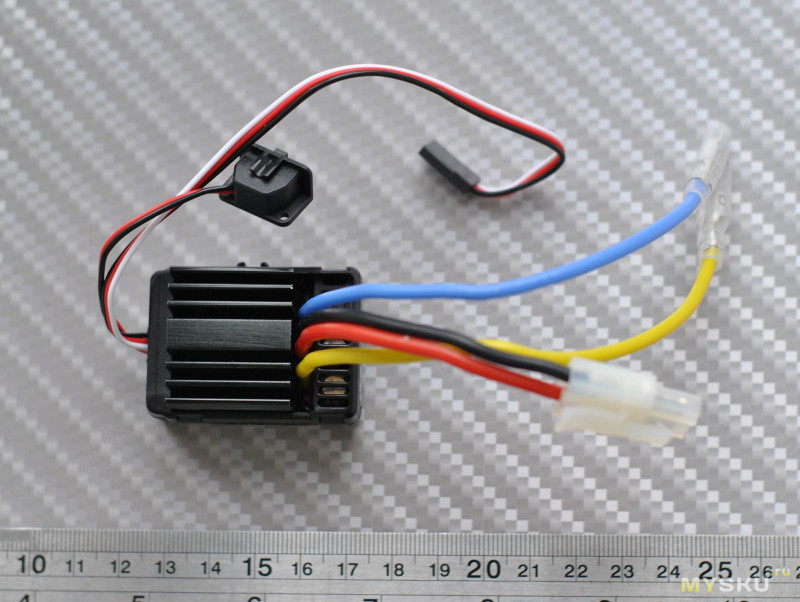 Силовой кабель как всегда короткий, это не удобно. Плата залита пластиком, сверху радиатор для охлаждения ключей.
Силовой кабель как всегда короткий, это не удобно. Плата залита пластиком, сверху радиатор для охлаждения ключей. Дно гладкое:
Дно гладкое: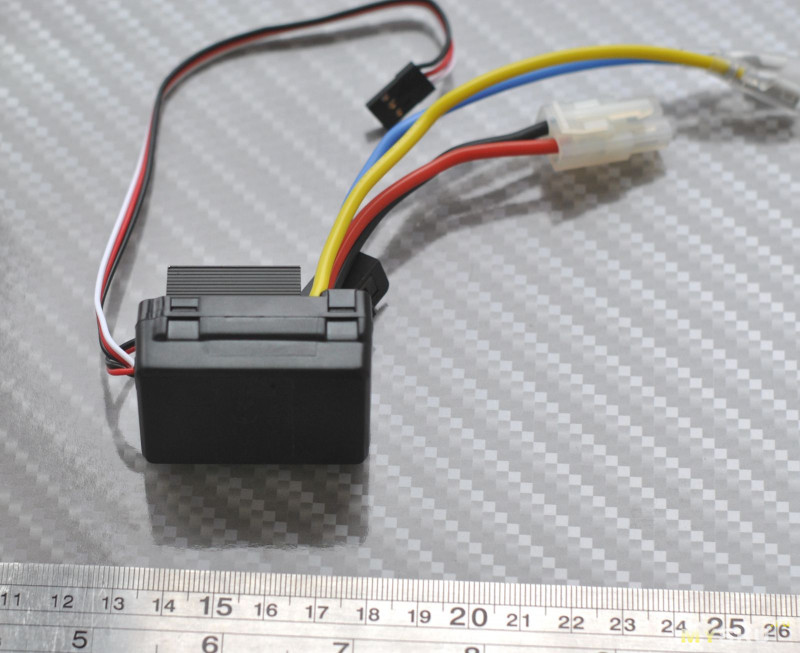 Рассчитано под крепление на двухсторонний скотч. Я креплю на термоклей, скотч от песка быстро отлипает. Размеры:
Рассчитано под крепление на двухсторонний скотч. Я креплю на термоклей, скотч от песка быстро отлипает. Размеры:
Особенности устройства: Battery Elimination Circuit (BEC) — устройство в регуляторе, которое преобразует напряжение силовой батареи для питания бортовой электроники. У нас 6 вольт соответственно напряжение на выходе регулятора, 1 ампер — максимальная нагрузка по току, которую он может выдержать. Это хороший результат, этот выход идет на питание бортовой электроники, в моем случае приемника и рулевой сервы. Серве лучше 6 В чем 5.
Разница в режиме вездеход/лодка: У лодки нет стоп мотора между вперед и назад. Мощность заднего хода больше у вездехода. Порог отключения мотора для лодки выше.
Защита от пониженного напряжения: На 2S при 6,5 В напряжения аккумулятора гасится на 50% мощность, а при 6 В мотор отключается. (На 3S на 9,75 В и 9 В соответственно). Защита от перегрева — 100 C отключение.
Установлен на Wltoys 10428-B2: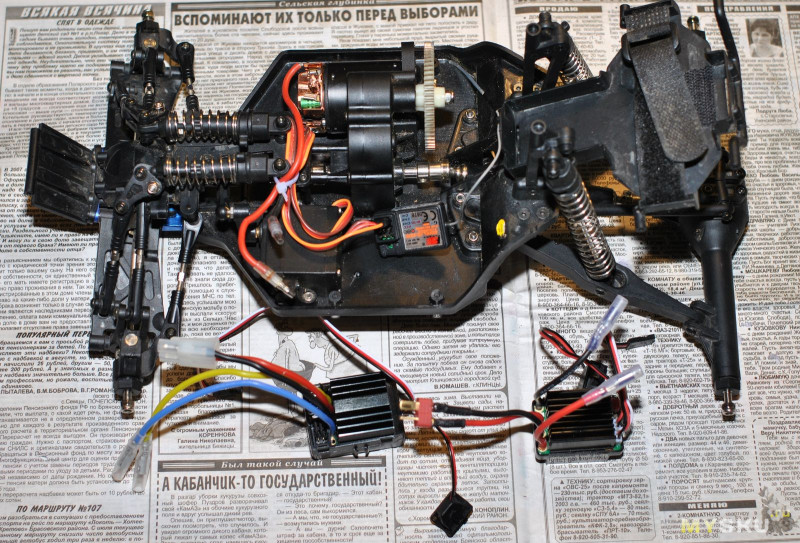 Это у меня полигон для испытания новых девайсов для RC.
Меняем разъем на тип Т:
Это у меня полигон для испытания новых девайсов для RC.
Меняем разъем на тип Т: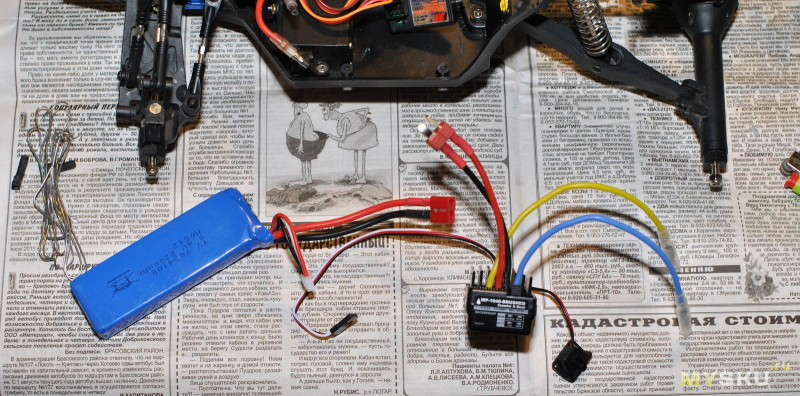 Закрепляем на дне рамы:
Закрепляем на дне рамы: Приемник такой.
Машина готова к испытаниям:
Приемник такой.
Машина готова к испытаниям:

Я доволен регулятором. На модели 10428 с 2S аккумулятором его достаточно.
Есть купон на скидку 3$: RPT727
Спасибо за внимание! Удачных покупок!
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
mysku.ru
Схема регулятора оборотов коллекторного двигателя 220в бывает двух типов — стандартная и модифицированная. Все зависит непосредственно от регулятора, который вы используете.
ОГЛАВЛЕНИЕ
 Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям. Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов. Простой регулятор вполне можно изготовить своими руками.
Но прежде чем будет обсуждаться схема, сначала нужно разобраться в коллекторных двигателях.
Конструкция любого коллекторного двигателя включает несколько основных элементов:
Работа стандартного коллекторного электродвигателя основана на следующих принципах.
Кроме стандартных коллекторных электродвигателей, существуют другие агрегаты:
Теперь возвращаемся к теме регулятора оборотов. Все доступные сегодня схемы можно разделить на две большие категории:
Разберемся в особенностях схем подробнее.

загрузка...
Стандартная схема регулятора коллекторного электромотора имеет несколько особенностей:
Если вас интересует принцип работы, то такая схема выглядит довольно просто.

Прогресс не стоит на месте. Несмотря на удовлетворительные характеристики стандартной схемы регулятора оборотов двигателя, усовершенствования никому еще не навредили.
Наиболее часто применяемыми схемами являются две:
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства.
Это дополнительные навыки для вас и определенная экономия средств для кошелька.
Для изготовления регулятора вам потребуется:
Монтажная схема будет выглядеть следующим образом.

Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично.
Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
electricvdele.ru
Откопал в закромах жесткого диска схемку, регулятора скорости для коллекторного — щеточного (brushed) двигателя. 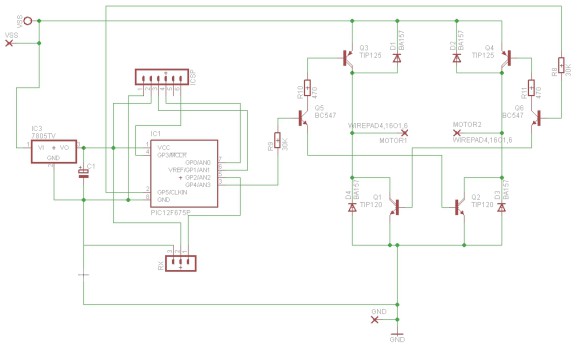 Для чего, да просто у сына сломалась радиоуправляемая машинка, — пульт благополучно выбросили, а машинку оставили, на запчасти. Найдя её через несколько лет в шкафу — думаю, — а не заказать ли пульт,к ней, на ebay. Сказано — сделанно. Через короткое время, по нашим меркам не много, всего 3 недели, пришел пуль — FS-GT2. И не каким боком приёмник не пристроить к этой машинке. Нет, коробочка очень маленькая, спору нет, но сигнал из этой коробочки не просто сигнал, а Стандартный Серво Сигнал…Т.е. серво машинка работает на ура, хотя и её у меня сначало небыло, нашел у сынишки в Arduino, — рулём обеспечен, а вот скоростью… Так вот, двигатель к приемнику не подключишь, там… ну не важно.
Для чего, да просто у сына сломалась радиоуправляемая машинка, — пульт благополучно выбросили, а машинку оставили, на запчасти. Найдя её через несколько лет в шкафу — думаю, — а не заказать ли пульт,к ней, на ebay. Сказано — сделанно. Через короткое время, по нашим меркам не много, всего 3 недели, пришел пуль — FS-GT2. И не каким боком приёмник не пристроить к этой машинке. Нет, коробочка очень маленькая, спору нет, но сигнал из этой коробочки не просто сигнал, а Стандартный Серво Сигнал…Т.е. серво машинка работает на ура, хотя и её у меня сначало небыло, нашел у сынишки в Arduino, — рулём обеспечен, а вот скоростью… Так вот, двигатель к приемнику не подключишь, там… ну не важно.
Понадобился регулятор скорости который управляется стандартным серво сигналом, вот и полез в закрома.
Сразу паять на плате не стал, вдруг, думаю лажа. Решил собрать на макетке, благо в наборе с Arduino была макетная плата. Схемка простенькая но на pic контроллере 12f675.
В один вечер собрал простенький программатор для pic — схемка простенькая, но как оказалосось — надёжная и что самое важное рабочая. Схема программатора:
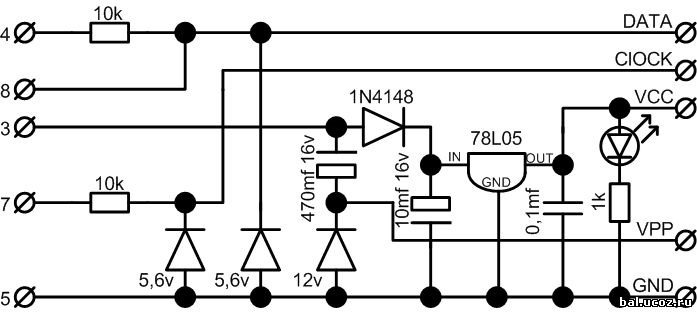 Программатор PIC микроконтроллеров
Программатор PIC микроконтроллеровСхема печатной платы: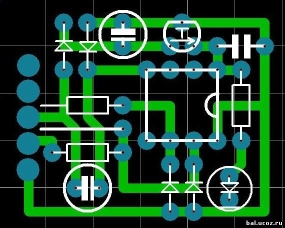
Программа для прошивки называется icprog106B, можно WinPIC 800 и PonyProg 2000, также можно использовать прочие программы поддерживающие JDM.
Я делал всё это на макетной плате, поэтому мне не пришлось возится с печатной платой, хотя сейчас в интернете описанно столько способов изготовления печатных плат, что даже начинающиму радио-любителб не составит особого труда сделать красивую печатную плату дома. Если хотите узнать как сделать печатную плату с помощью утюга ищите в поисковикакх по словам печатная плата ЛУТ, или на этом сайте, но я не смог, забыл где и когда.
Вот что в принуипе у вас должно выйти: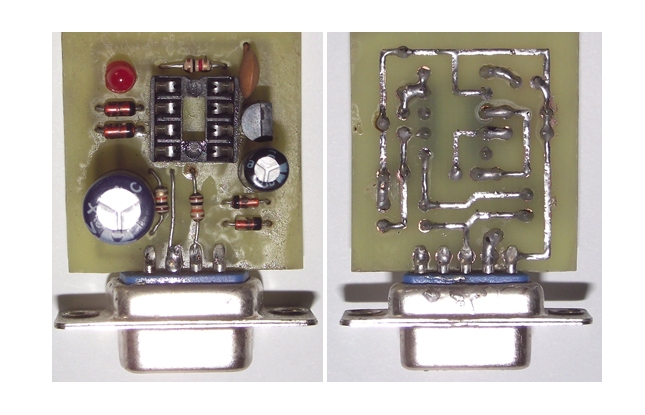 Этим программатором можно прошить многие процессора, но мне он нужен был для pic12f675.
Этим программатором можно прошить многие процессора, но мне он нужен был для pic12f675.
Вот схемма того самого регулятора скорости коллекторного двигателя, с обратным ходом ESC, по словам автор (автора найти не смог т.к документ скопировал в Word из интернет), обеспечивает ~ 206 уровней мощности в прямом и обратном направлении, с автоматическим обнаружением нулевой после включения питания… Схема, оказывается представляетиз себя обычный H-мост ( H-bridge ), которым управляет микропроцессор pic12f675, в комплекте сосхемой шел исходник: скачать можно здесь — brushed_ESC_code (если вам понадобится перевести его для другого контроллера например pic 12f639 то в архиве есть исходники), второй файл — прошивка для 12f675 код в шестнадцатиричном виде ( hex ).
Схема печатной платы:
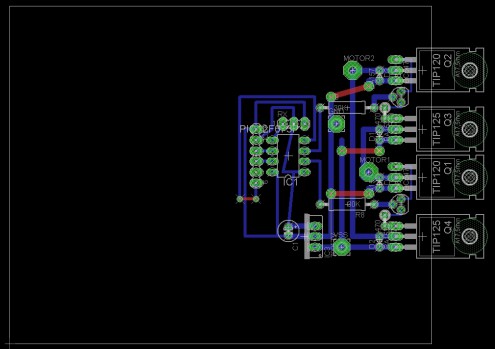 layers — speed control brushed motor
layers — speed control brushed motorФото того что получилось у меня:
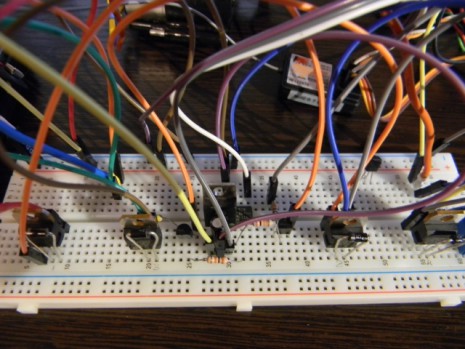
Ну и на последок подсоединил мост от той самой радиоуправляемой машинки с тем самым коллекторным двигателем, подсоединил серву, приемник и батарейки. Всё работает как часы — и в перёд и назад и руль в лево, в право. Осталось перенести с макетки на печаную плату. 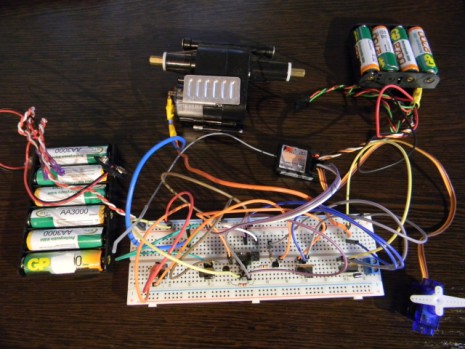 ( Задний мост, серва, регулятор скорости с реверсом, приёник от FS-GT2, батарейки )
( Задний мост, серва, регулятор скорости с реверсом, приёник от FS-GT2, батарейки )
Результаты опубликую в следующей статье когда доделаю.
www.helpset.ru
Микросхема TDA1085 фирмы MOTOROLA (отечественный аналог — КС1027ХА4) представляет собой контроллер коллекторного электродвигателя (ЭД) переменного тока. Она включает в себя все необходимые управляющие узлы и элементы, обеспечивающие функционирование ЭД в различных режимах его работы (например, в режимах разгона и стабилизации выбранной скорости вращения).
|
|
|
Готовый регулятор оборотов или все для его сборки вы можете заказать в нашем интернет-магазине
|
| |
| 1 | Синхронизация тока |
| 2 | Синхронизация напряжения |
| 3 | Ограничение тока двигателя |
| 4 | Текущая скорость |
| 5 | Установка скорости |
| 6 | Управление током генератора пилообразного сигнала |
| 7 | Время генератора разгона |
| 8 | Общий провод |
| 9 | Плюс питания |
| 10 | Подключение параллельного стабилизатора и балластного резистора |
| 11 | Накапливающий конденсатор |
| 12 | Цифровой датчик скорости |
| 13 | Выход генератора запускающих импульсов |
| 14 | Конденсатор пилообразного напряжения |
| 15 | Установка пилообразного тока |
| 16 | Замкнутый контур стабилизации |
| Параметр | Обозначение | Значение | Ед. изм. | |
| Питающее напряжение на выводе 9 | VCC | 15 | В | |
| Максимальное напряжение на следующих выводах | Вывод 3 | VPin | +5 | В |
| Выводы –5–6–7–13–14–16 | от 0 до VCC | |||
| Вывод 10 | от 0 до +17 | |||
| Максимальный ток на следующих выводах | Выводы 1 и 2 | IPin | от -3 до +3 | мА |
| Вывод 3 | 0т -1 до 0 | |||
| Вывод 9 (VCC) | 15 | |||
| Вывод 10 параллельный стабилизатор | 35 | |||
| Вывод 12 | от -1 до +1 | |||
| Вывод 13 | -200 | |||
| Максимальная рассеиваемая мощность | PD | 1 | Вт | |
| Тепловое сопротивления, кристалл-воздух | RΘJA | 65 | ºC/Вт | |
| Диапазон рабочих температур кристалла | TJ | от – 10 до + 120 | ºC | |
| Температура хранения | Tstg | от – 55 до + 150 | ºC | |
| Параметр | Обозначение | Мин. | Тип. | Макс. | Ед. изм. |
| Стабилизатор напряжения | |||||
| Внутренне регулируемое напряжение стабилизации (Vpin 9) (Ipin 7 = 0, Ipin 9 + IPin 10 = 15 mA, Ipin 13 = 0) | VCC | 15 | 15,3 | 15,6 | В |
| Температурный коэффициент напряжения стабилизации | TF | — | — 100 | — | ppm/°C (одна миллионная доля вольта на градус Цельсия) |
| Потребляемый ток (Ipin 9) (V9 = 15 В, V12 = V8 = 0, I1 = I2 = 100 мкА, все другие выводы не подключены) | ICC | 4,5 | 6,0 | мА | |
| Контроль напряжения стабилизации уровень включения | VCC EN | — | VCC — 0.4 | — | В |
| Контроль напряжения стабилизации уровень выключения | VCC DIS | — | VCC — 1.0 | — | |
| Генератор разгона | |||||
| Диапазон напряжений на входе для задаваемой скорости | VPin 5 | 0,08 | — | 13,5 | В |
| Опорный ток смещения на входе | -IPin 5 | 0 | 0,8 | 1,0 | мкА |
| Опорный ток смещения при выборе разгона | -IPin 6 | 0 | — | 1,0 | мкА |
| Начальный уровень при задании разгона | VDS | 0 | — | 2,0 | В |
| Конечный уровень при задании разгона VPin6 = 0.75 В | VDF/VDS | 2,0 | 2,09 | 2,2 | |
| Зарядный ток при быстром разгоне VPin 7 = 0 В | -IPin 7 | 1.0 | — | 1.7 | мА |
| Зарядный ток при быстром разгоне VPin 7 = 10 В | 1.0 | 1,2 | 1.4 | ||
| Зарядный ток при задании разгона VPin7= 2.0 В | -IPin 7 | 4,0 | 5,0 | 6,0 | мА |
| Ограничитель тока | |||||
| Ограничение тока усилителя — IPin 7/IPin 3 (IPin 3 = — 300 мкА) | Cg | 130 | 180 | 250 | |
| Отслеживание порогового напряжения IPin 3 = -10 мкА | VPin 3 TH | 50 | 65 | 80 | мВ |
| Преобразователь частоты в напряжение | |||||
| Входной сигнал «Низкий уровень напряжения» | V12 L | -100 | — | — | мВ |
| Входной сигнал «Высокий уровень напряжения» | V12 H | +100 | — | — | |
| Напряжение сброса | V12 R | 5.0 | — | — | В |
| Отрицательное напряжение срабатывания IPin 12 = — 200 мкА | -V12 CL | — | 0,6 | — | В |
| Ток смещения на входе | -IPin 12 | — | 25 | — | мкА |
| Внутренний коэффициент усиления тока G = IPin 4/IPin 5 , VPin 4 = VPin 5 = 0 | G.O | 9,5 | 11 | ||
| Линейность усиления в зависимости от напряжения на выводе 4 (G8.6 = Усилению при VPin 4 = 8.6 В) | G.-G8.6 | ||||
| При V4=0 В | 1.04 | 1.05 | 1.06 | ||
| При V4 = 4.3 В | 1.015 | 1.025 | 1.035 | ||
| При V4 = 12 В | 0.965 | 0.975 | 0.985 | ||
| Температурный коэффициент усиления (VPin 4 = 0) | TF | — | 350 | — | ppm/°C |
| Ток поверхностной утечки на выходе (IPin 11 = 0) | -IPin 4 | 0 | — | 100 | нА |
| Усилитель управления | |||||
| Диапазон напряжений на входе для текущей скорости | VPin4 | 0 | — | 13,5 | В |
| Напряжение смещения на входе VPin 5 — VPin 4 (IPin16=0, VPin16 = 3.0 и 8.0 В) | Voff | 0 | — | 50 | мВ |
| Крутизна усиления (IPin 16/Δ (V5-V4)) (IPin 16 = ± 50 мкА, VPin 16 = 3.0 В) | T | 270 | 340 | 400 | мкА/В |
| Возможное отклонение выходного тока источника | IPin 16 | -200 | -100 | -50 | мкА |
| Возможное отклонение выходного тока стока | 50 | 100 | 200 | ||
| Напряжение насыщения на выходе | V16 sat | — | — | 0,8 | В |
| Генератор импульсов | |||||
| Уровни токов синхронизирующих импульсов в линии напряжения | IPin 2 | — | ±50 | ±100 | мкА |
| Уровни токов синхронизирующих импульсов в линии тиристора | IPin 1 | — | ±50 | ±100 | |
| Задержка запускающего импульса (CPin 14 = 47 нФ, RPin 15 = 270 кОм | TP | — | 55 | — | мкс |
| Период повторения запускающих импульсов | TR | — | 220 | — | мкс |
| Импульсный ток на выходе VPin 13 = VCC — 4.0 В | -IPin 13 | 180 | 192 | — | мА |
| Ток поверхностной утечки на выходе VPin 13 = — 3.0 В | I13 L | — | — | 30 | мкА |
| Напряжение на входе при полном угле проводимости | V14 | — | 11,7 | — | В |
| Высокий уровень пилоообразного напряжения | V14 H | 12 | — | 12,7 | D |
| Ток разряда пилообразного напряжения, IPin 15 = 100 мкА | IPin 14 | 95 | — | 105 | мкА |
|
| ||
| Предельный ток 10 А настраивается экспериментально, подбором резистора R4 | Диапазон скоростей вращения двигателя: от 0 до 15000 об/мин | |
| Максимальный разгон: до 3200 об/мин за 1 секунду | ||
| Нормальный разгон: за 10 с от 850 до 1300 об/мин | 8 полюсной тахогенератор должен выдавать максимальное напряжение 30 В при 6000 об/мин, в разомкнутой цепи | |
| Скорость вращения, об/мин | Напряжение на выводе 5 | Конвертер частоты вращения в напряжение: 8 мВ на 1 об/мин (12 в при максимальной частоте вращения, CPin 11 = 680 пФ, VCC = 15.3 В |
| 800 | 609 мВ | Симистор на 15 А, 600 В, минимальный ток на управляющем электроде 90 мА |
| 1300 | 966 мВ | |
| 7500 | 5,912 В | |
| 15000 | 12 В | |
Общее описание
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Скорость вращения двигателя отслеживается тахогенератором в цифровом формате (считаются импульсы от тахогенератора), а затем преобразуется в аналоговое напряжение. Скорость устанавливается, внешне фиксированной, и подается на вход внутреннего линейного регулятора после того, как будут заданы программируемые линейные ускорения. Общий результат состоит в поддержании полного диапазона скоростей с двумя линейными ускорениями, которые позволяют эффективно управлять стиральной машиной. Кроме того, TDA 1085C защищает всю систему от переменного тока питающей сети, при остановке или колебаниях, и от перегрузки по току в двигателе или при неисправности таходатчика.
Функции входов и выходов ( для рисунков 1 и 8)
Регулятор напряжения (стабилизатор) – (Контакты 9 и 10). Это регулятор параллельного типа способный поглощать большие токи и давать хорошие характеристики. Питание подается от сети переменного тока через внешние гасящие резисторы R1, R2, (резисторы 6.8 кОм и 270 Ом) и выпрямитель. Полуволна тока после диода 1N4007 подается на сглаживающий фильтр, состоящий из двух конденсаторов, емкостью 100 мкФ и резистора 270 Ом, напряжение на котором контролируется микросхемой. Когда питание (Vcc) превысит 15 В, ток проходит по другому гасящему резистору R10 на вывод 10. Эти три резисторы должны быть подобраны таким образом, чтобы удовлетворять следующим условиям:
Отказ по питанию в цепи переменного тока приведет к отключению. Двойной емкостный фильтр, состоящий из резисторов R1 и R2, хорошо сглаживает пульсации и устраняет шумы при разгоне двигателя.
Контроль частоты вращения (выводы 4, 11, 12). Микросхема может работать с внешним аналоговым датчиком скорости вращения: его выход должен быть подключен выводу 4, а выводы 12 и 8 должны быть соединены между собой.
В большинстве случаев более удобно использовать цифровой датчик скорости вращения двигателя с одним недорогим тахогенератором, который не нуждается в настройке. За каждый положительный цикл на выводе 12, конденсатор, подключенный к выводу 11, заряжается почти до напряжения Vcc . В это же время, на вывод 4 подается ток в 10 раз превышающий, зарядный ток конденсатора C11. Ток источника называется G и жестко задан, но тем не менее, требует регулировки подстроечным сопротивлением 50 кОм, подключенном к выводу 4. Ток через этот резистор пропорционален емкости на выводе 11 и скорости вращения двигателя; напряжение на выводе 4 фильтруется от помех с помощью конденсатора и представляет “истинную фактическую скорость вращения двигателя”.
Чтобы сохранить линейность на высоких оборотах, важно убедиться, что емкость, подключенная к выводу 11 полностью заряжается: внутреннее сопротивление источника, подключенного к выводу 11, имеет импеданс 100 кОм. Тем не менее емкость на выводе 11, должна быть максимально высокой, так как она имеет большое влияние на температурный коэффициент. Резистор 470 кОм между выводами 11 и 9 уменьшает ток утечки и влияние температурного коэффициента.
Через вывод 12 осуществляется функция контроля: когда напряжение на нем превышает 5 В, запускающие импульсы тормозятся и микросхема сбрасывается. Так же через него отслеживается целостность цепи тахогенератора, и в случае ее нарушения, запускающие импульсы тормозятся, что защищает двигатель от ухода из-под контроля. Внутри TDA1085C к выводу 12 подключен демпферный диод, что дает возможность сделать схему более компактной.
Генератор пусковых импульсов — (Выводы 1, 2, 5, 13, 14, 15)
Эта цепь выполняет четыре функции:
Сопротивление на выводе 15 задает разрядный ток конденсатора на выводе 14. Пилообразный сигнал определяется R15 и С14(обычно 47 нФ). Длительность управляющего импульса и период повторения находятся в обратно пропорциональной зависимости от крутизны наклона пилообразного напряжения.
Генератор пилообразного напряжения – (выводы 5, 6, 7). Истинные значения скорости устанавливаются в соответствии со значениями на выходе генератора пилообразного сигнала (вывод 7). В соответствии с заданным значением скорости ( напряжение на выводе 5), генератор пилообразного напряжения заряжает внешний конденсатор C7 до момента, когда напряжение на выводе 5 (заданная скорость) сравняется с напряжением на выводе 4 (действительная скорость), смотрите рисунок 2. Микросхема имеет внутренний источник зарядного тока в 1.2 мА, который выдает от 0 до 12 В на выводе 7. Он дает быстрый разгон двигателя (обычно за 5.0 с), что позволяет быстро изменять скорость без чрезмерной нагрузки на механические части привода. В TDA 1085C есть возможность снизить этот высокое ускорение с введением низкого разгона. Это достигается путем уменьшения тока через вывод 7 до 5.0 мА, оставаясь под полным управлением напряжением на выводе 6. Это возможно при соблюдении следующих условий:
Для двух фиксированных значений VPin 5 и VPin 6, скорость мотора будет иметь большой разгон. Если сброс произойдет (независимо от причин), указанных выше последующий разгон будет полностью перерабатываться от 0 до максимальной скорости. Если напряжение на выводе 6 равно 0, возникает только высокий темп разгона.
Чтобы установить действительную нулевую скорость надо ,чтобы напряжение на выводе 5 (от 0 до 80 мВ) интерпретировалось как истинный ноль. Как следствие, при изменении устанавливаемой скорости, проектировщик должен быть уверен, что любой переходный процесс не будет проходить через ноль (напряжение на выводе 5 не будет ниже 80 мВ) иначе вся схема будет перезапущена.
Как и напряжения, подаваемые на контакты 5 и 6, являются производными от внутреннего стабилизатора напряжения, так и напряжение на выводе 4 тоже происходит от того же источника питания, скорость мотора (которая определяется соотношением между вышеуказанными напряжениями) является полностью независимой от колебаний напряжения питания Vcc и температурного фактора.
Усилитель управления – (пин 16) он усиливает разницу между истинным значением скорость (вывод 4) и заданной скорости (контакт 5), посредством генератора пилообразного сигнала (генератора разгона). Его сигнал на выходе (вывод 16) имеет двойную чувствительность с максимальным возможностям ± 100 мА и заданной крутизной (340 мА/В это типовое значение). Вывод 16 напрямую управляет генератором пусковых импульсов, и должен быть нагружен на электрическую сеть, которая компенсирует механические характеристики двигателя и его нагрузку, для того, чтобы обеспечить стабильность в любом состоянии и кратчайшую переходную характеристику см. Рис.4.
Эта сеть должна быть подобрана экспериментально.
В случае периодического изменения крутящего момента, вывод 16 непосредственно обеспечивает угол сдвига фаз колебаний.
Вывод 13 является импульсным выходом, и внешний ограничивающий резистор на нем обязателен.
Ограничитель тока – (вывод 3). Безопасная работа двигателя и симистора при все условиях обеспечивается за счет ограничения пикового тока. Ток двигателя дает переменное напряжение на шунтирующем резисторе (0,05 Вт рис. 4). Отрицательные полуволны передаются на вывод 3, который имеет положительный потенциал, определяемый резисторами R3 и R4. Когда возрастает ток двигателя, динамический диапазон напряжения на выводе 3 тоже увеличивается. Когда вывод 3 становится немного отрицательным относительно вывода 8 , ток начинает проходить по нему. Этот ток, как правило, усиливают в 180 раз, затем используется для разрядки конденсатора на выводе 7 . Как следствие, уменьшается угол регулирования до значения, где будет достигнуто равновесие. Выбор резисторов R3, R4 и шунта определяет величина тока разряда конденсатора на выводе 7.
Обратите внимание, что ограничитель тока действует только на пике тока симистора.
 Разводка печатной платы
Разводка печатной платы
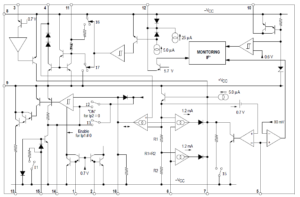 Внутренняя схема
Внутренняя схема
Применение
Правила компоновки печатной платы.
В большинстве схем, где используется TDA1085C, на одной печатной плате рядом с большими токами и напряжениями могут присутствовать сигналы низкого напряжения значением в несколько милливольт.
Самое главное разделить их друг от друга, для этого следует соблюдать следующие правила:
В качестве примера на рисунке 5 представлена плата, на которой показано подключение группы чувствительных к помехам выводов и связанных с ними конденсаторов в соответствии с вышеперечисленными правилами. Обратите внимание на полное разделение низковольтной сигнальной части и мощной высоковольтной части. Их раздел идет вдоль линии AB.
Соблюдение этих правил дает возможность регулировки во всем диапазоне скоростей.
Источник питания
Поскольку рассеивающий резистор рассеивает заметную мощность, необходимо по возможности снизить потребление тока до минимума. При изношенном щеточном узле схема может подавать запускающие импульсы несколько раз, что вызывает увеличение потребляемого тока. При выборе гасящего резистора нужно это учитывать. Кроме того параллельный стабилизатор должен всегда находиться в следующем динамическом диапазоне: ток через вывод 10 должен быть выше 1 мА, а напряжение выше 3 В при самой плохой конфигурации. Двойной фильтр на выходе обязателен.
Цепь тахогенератора
Напряжение сигнала от тахогенератора должно быть пропорционально скорости вращения двигателя. Для устойчивой работы к выходу тахогенератора необходимо подключить RC-фильтр. Выполнение этих факторов, дает сигнал постоянной амплитуды на выводе 12 на всем диапазоне скоростей вращения двигателя. Рекомендуется проверить, чтобы эта максимальная амплитуда находилась в пределах 1,0 В, чтобы иметь самое большое отношение сигнал/шум без перезапуска микросхемы (что может произойти, если напряжение на выводе 12 достигнет 5,5 В). Необходимо также проверить, чтобы сигнал на выводе 12 находился в балансе между «высоким значением» (более 300 мВ) и «низким». 8-полюсный тахогенератор — это минимум для стабильности на низких оборотах, а 16-полюсник еще лучше.
RC фильтр в цепи тахогенератора должен быть настроен на 30 Гц, чтобы быть как можно дальше от 150 Гц, что соответствует третьей гармонике сети переменного тока, генерируемой двигателем во время запуска. Кроме того, подключенный к выводу 12, высокоомный резистор, дает положительное смещение на этом выводе, устраняя шум, который может интерпретироваться как сигнал от тахогенератора. Это смещение должно быть спроектировано таким образом, чтобы на выводе 12 было не менее 200 мВ (отрицательное напряжение) при самой низкой скорости вращения двигателя.
Преобразователь частоты в напряжение
Емкость на выводе 11 имеет рекомендованное значение 820 пФ для 8-полюсных тахогенераторов с максимальной скоростью вращения двигателя 15000 об/мин, а сопротивление на выводе 11 всегда должно быть 470 кОм.
Сопротивление подключенное к выводу 4 должно выбираться так, чтобы давать 12 В при максимальной скорости вращения двигателя, чтобы максимизировать отношение сигнал / шум. Поскольку отношение FV / C, а также значение CPin 11 разделены, RPin 4 должно быть регулируемым. Оно должно состоять из постоянного резистора и подстроечного, составляющего 25% от их общего сопротивления. Регулировка при этом станет проще.
После регулировки, например, при максимальной скорости вращения двигателя, FV / C имеет остаточную нелинейность; коэффициент преобразования (мВ на один об / мин) увеличивается на 7,7% по мере того, как скорость приближается к нулю. Гарантированный разброс последнего очень узкий, максимальная ошибка при этом составит 1% от скорости вращения.
Следующие формулы определяют напряжение на выводе 4 (VPin4) в вольтах:
VPin 4 = G.0 ∙ (VCC–Va) ∙ CPin 11 ∙ R4 ∙ f ∙ 1/(1+120k/RPin 11)
G.0 ∙ (VCC – Va) ≈ 140
Va = 2.0 VBE
120 k = Rint, (входное сопротивление на выводе 11)
Установка скорости вращения — (контакт 5) При проектировании подбирают цепь внешних резисторов, которые задают серию различных напряжений, соответствующих различным скоростям вращения двигателя. При переключении внешних резисторов необходимо убедиться убедитесь, что на контакт 5 не подается напряжение ниже 80 мВ. Если такое случиться, произойдет полная перезагрузка схемы.
Генератор разгона — (Pin 6) Если требуется только высокий темп разгона, соедините вывод 6 с землей.
При задании разгона, устанавливается напряжение на выводе 6, соответствующее точке разгона двигателя. Задание (или медленный разгон) будет продолжаться до момента, когда скорость двигателя достигнет удвоенного начального значения.
Соотношение двух напряжений может быть изменено вниз (рисунок 6) или вверх (рисунок 7).
Задаваемый разгон может быть уменьшен внешним резистором от VCC, заряжающим емкость на выводе7, добавляя его ток к току внутреннего генератор 5.0 мА.
Силовые цепи
Переключающий импульс симистора должен определяться резистором на выводе 13 в соответствии с потребностями в квадранте IV.Длительность запускающего импульса может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые интерферируют в пределах контактов 14 и 16, именно те, которые его определяют. Легко заметный, этот эффект безвреден.
Симистор должен быть защищен от скачков напряжения во внешней цепи питания цепочкой 100 нФ х 100 Ом.
Шунтирующий резистор должен быть как можно более неиндуктивным. Его можно изготовить, используя константановую проволоку.
Когда нагрузка представляет собой универсальный двигатель постоянного тока, подключенный через выпрямительный мост, симистор должен быть защищен от скачков напряжений при коммутации, катушкой 1,0-2,0 мГн, подключенной последовательно с выводом симистора MT2.
Функции синхронизации выполняются резисторами, определяющими напряжение в линии переменного тока и проводимость симистора. Значение 820 кОм является нормальным, но может быть уменьшено до 330 кОм для того, чтобы обнаруживать «нули» и уменьшить остаточную составляющую в линии постоянного тока ниже 20 мА.
Ограничение тока
Ограничитель тока начинает разряжать конденсатор 7 (опорная скорость), когда ток двигателя достигает заданного порогового уровня. Коэффициент усиления контура определяется резистором, соединяющим вывод 3 с последовательным шунтом. Опыт показал, что оптимальное значение для ограничения среднеквадратичного тока 10 A находится в пределах 2,0 кВт. Вывод 3 имеет чувствительность по току, которая ограничена разумными значениями и не должна реагировать на пиковые значения.
Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению 5,0 В вместо того, чтобы оставаться свободным.
Стабильность контура
Цепочка на выводе 16 является преобладающей и должна быть скорректирована экспериментально во время разработки модуля. Значения, указанные на рисунке 4, типичны для стиральных машин, но допускают большие изменения от одной модели к другой. R16 (единственное ограничение) не должен опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания вызовет большие переходные ошибки при нагрузках.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
rudatasheet.ru
 Исполнение в пластиковом корпусе CASE 648
Исполнение в пластиковом корпусе CASE 648 С буквой D в маркировке. Пластиковый корпус CASE 751B (SO–16)
С буквой D в маркировке. Пластиковый корпус CASE 751B (SO–16)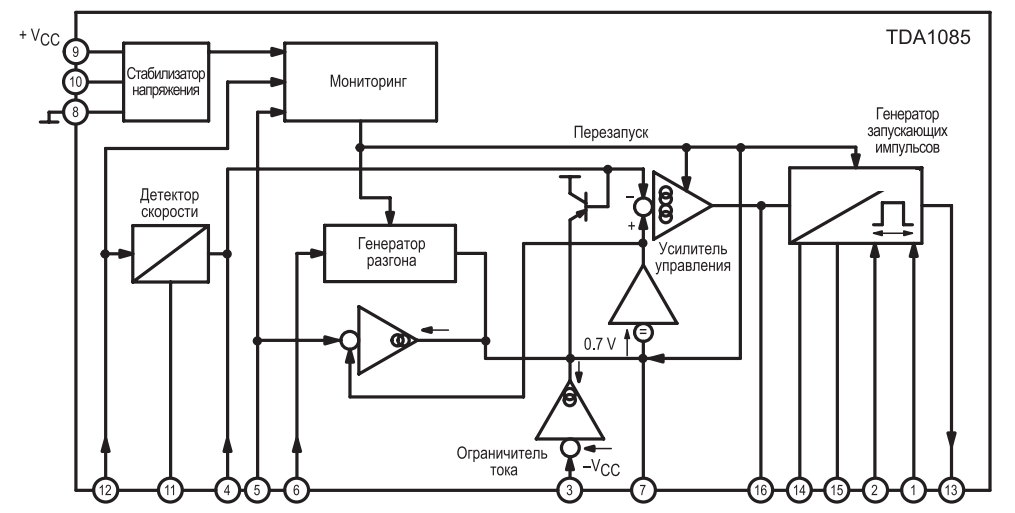 Блок — схема и назначение выводов
Блок — схема и назначение выводов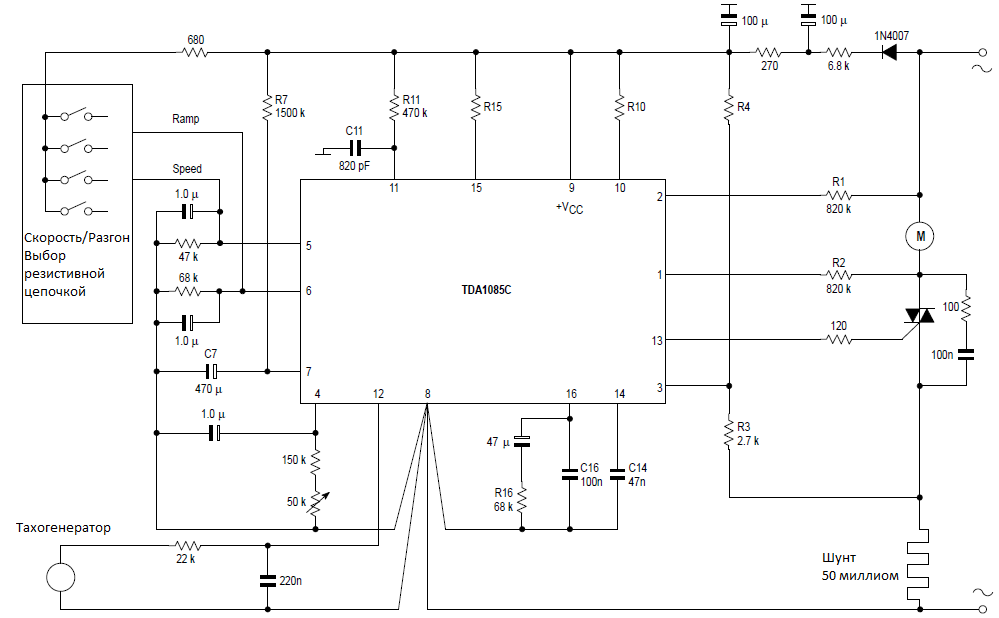 Принципиальная схема включения TDA1085
Принципиальная схема включения TDA1085