РАСЧЕТ СИНХРОННЫХ МАШИН
§ 11-1. Единые серии синхронных машин
Общие сведения. Синхронные машины применяют во многих отраслях народного хозяйства, в частности, в качестве генератора в передвижных и стационарных электрических станциях, двигателей в установках, не требующих регулирования частоты вращения или нуждающихся в постоянной частоте вращения.
Наиболее распространена конструктивная схема синхронной машины с вращающимся ротором, на котором расположены явновыраженные полюсы. Иногда явноолюсные синхронные машины малой мощности (до 15 кВт) выполняют по конструктивной схеме машин постоянного тока, т. е. с полюсами, расположенными на статоре, заменяется контактными кольцами. Сейчас отечественная промышленность выпускает несколько общепромышленных и специальных серий синхронных машин.
Серия ЕСС. Трехфазные синхронные генераторы серии ЕСС изготовляют мощностью от 5 до 50 кВт при высоте оси вращения мм, в защищенном исполненииIР23, с самовентиляцией IС01, с частотой вращения 1500 об/мин. Эти генераторы предназначены для продолжительного режима работы в передвижных и стационарных электроустановках и в качестве источников трехфазного переменного тока напряжением 230 и 400 В, с частотой 50 Гц, с коэффициентом мощности, равным 0,8 (при отстающем токе), в условиях умеренного или тропического климата.
Генераторы серии ЕСС выполняют явнополюсными с самовозбуждением через полупроводниковые выпрямители и снабжают аппаратурой для автоматического регулирования напряжения, которая состоят из блока регулирования напряжения, корректора и потенциометра установки. Эта аппаратура обеспечивает точность поддержания напряжения на зажимах в пределах ±2% от среднерегулируемого значения при изменении нагрузки от нуля до номинальной величины и коэффициенте мощности в пределах от 1,0 до 0,8, при отклонении частоты вращения первичного двигателя от номинальной величины не более ±3 % и при неизменной нагрузке не более ±1 %. Схема регулирования позволяет изменять установку напряжения в пределах от 100 до 95% .
Генераторы допускают 10% - ную перегрузку по мощности в течение одного часа при номинальных значениях напряжения и коэффициента мощности; на х. х. обеспечивают пуск ненагруженного асинхронного двигателя, номинальная мощность которого не превышает 70% мощности генератора, при снижении напряжения, не превышающем 50% от номинального значения. Нагревостойкость изоляционных материалов генераторов соответствует классу В; система вентиляции - аксиальная вытяжная. Приводными двигателями генераторов серии ЕСС могут служить дизельные, карбюраторные, газогенераторные и электрические двигатели, а также локомобили. Вращение передается через упругую муфту или клиноременную передачу.
Серии СД2 и СГ2. Синхронные двигатели серии СД2 и генераторы серии СГ2 изготовляют мощностью от 132 до 1000 кВт, при высоте оси вращения 450 мм, в защищенном исполнении IP23, с самовентиляцией IC01, с частотой вращения от 500 до 1500 об/мин.
Двигатели используют для привода механизмов, не требующих регулирования частоты вращения (насосов, вентиляторов и др.), и изготовляют на напряжения 380 и 6000 В, при частоте 50 и 60 Гц. Генераторы предназначены для выработки трехфазного переменного тока, напряжением 400 В, частотой 50 Гц на стационарных дизель-электрических станциях.
Электрические машины серий СД2 и СГ2 рассчитаны на продолжительный режим работы. Их возбуждение осуществляется от устройства, питающегося от дополнительной обмотки, заложенной в пазы статора. Нагревостойкость изоляционных материалов соответствует классу В. Ток возбуждения регулируют изменением угла зажигания тиристоров преобразователя возбудительного устройства. Последние смонтированы в шкафах: в одном для двигателя и в двух для генератора. В шкафах размещены тиристорные преобразователи, элементы электронной системы управления, коммутационная аппаратура. Система управления двигателя осуществляет автоматическую подачу возбуждения в процессе пуска при спадании тока статора до установленной величины, а также обеспечивает форсировку возбуждения при падении напряжения в главной цепи двигателя до 80—85% номинального. Отключается форсировка при увеличении напряжения сети до 90—95% номинального значения.
Двигатели и генераторы допускают правое и левое направление вращения. Двигатели рассчитаны на прямой пуск при номинальном напряжении сети и допускают два пуска подряд из холодного состояния и один из нагретого.
§ 11-2. Исходные данные для проектирования.
Для проектирования синхронных машин должны быть заданы следующие исходные данные: 1. Назначение — генератор или двигатель. 2. Номинальный режим работы по ГОСТ I83. 3. Номинальная отдаваемая мощность по ГОСТ 12139. 4. Количество фаз статора. 5. Способ соединения фаз статора (λ;Δ). 6. Частота напряжения 7. Коэффициент мощности по ГОСТ 20550, 22407, ГОСТ 18200. 8. Номинальное линейное напряжение по ГОСТ 21128. 9. Частота вращения по ГОСТ 10683. 10. Способ возбуждения. 11. Степень защиты от внешних воздействий по СТ 247. 12. Способ охлаждения по ГОСТ 20459. 13. Исполнение по способу монтажа во СТ 246. 14. Климатические условия и категория размещения по ГОСТ 15150 и 15543. 15. Форма выступающего конца вала. 16. Способ соединения с приводным механизмом (для двигателей) или с приводным двигателем (для генераторов).
Кроме того, дополнительно используют данные о высоте оси вращения по ГОСТ 13267, установочно-присоединительных размерах по ГОСТ 18709 или 20839. Содержание перечисленных предписаний стандартов приведено в § 1-2. Во всем не оговоренном в исходных данных машины должны удовлетворять требованиям ГОСТ 183.
Примеры расчета машин.
studfiles.net
- устранить паразитный воздушный зазор между магнитопроводом и обмоткой;
- исключить возможность повреждения обмотки при протаскивании;
- исключить магнитную ассимметрию магнитопровода относительно постоянного магнита.
Улучшение технологии происходит за счет ухудшения магнитных характеристик магнитопровода.
1.3 Получить навыки про проектированию синхронной машины с постоянными магнитами. Ознакомиться с существующими методиками. Разработать техническое задание одной из них.
Существует множество методик по расчету синхронных машин с постоянными магнитами. Главным недостатком является получение только приближенных результатов, потому что процессы преобразования энергии в данном виде машин сложен и мало изучен.
Техническое задание на проектирование:
Синхронный двигатель с постоянными магнитами:
Номинальная мощность, кВт - 
Номинальное фазное напряжение, В –  ;
;
Частота вращения, об/мин -  ;
;
Коэффициент мощности, о.е. -  ;
;
Коэффициент полезного действия, % -  ;
;
Количество фаз -  .
.
Расчет:
Определение главных размеров и выбор электромагнитных нагрузок.
К главным размерам электрической машины относятся диаметр расточки статора и расчетная длина воздушного зазора.
Электромагнитный момент синхронного двигателя, Н/м
 ,
,
где  - номинальная мощность, Вт;
- номинальная мощность, Вт; 
 - коэффициент полезного действия, о.е;
- коэффициент полезного действия, о.е;  - коэффициент мощности;
- коэффициент мощности;  - коэффициент учитывающий разницу между ЭДС и напряжением.
- коэффициент учитывающий разницу между ЭДС и напряжением. Расчетная длина воздушного зазора, м
 ,
,
где  - расчетный коэффициент полюсного перекрытия;
- расчетный коэффициент полюсного перекрытия;  - линейная нагрузка, А/м;
- линейная нагрузка, А/м;  - индукция в воздушном зазоре, Тл;
- индукция в воздушном зазоре, Тл;  - диаметр расточки статора, м
- диаметр расточки статора, м

Для своей машины я выбрал магниты с  Тл и
Тл и  А/м.
А/м.
Полюсное деление, м
Магнитный рабочий поток (предварительно), Вб

Ток фазы, А

Зубцовый шаг на статоре, м
 ,
,
где  - количество пазов на статоре (выбирается по рекомендации).
- количество пазов на статоре (выбирается по рекомендации).
Расчет геометрии статора.
Выбираем для данного вида машины трапецеидальные пазы полузакрытые.
ЭДС холостого хода, В

где  - фазное напряжение, В;
- фазное напряжение, В;  .
.
Магнитный поток, соответствующий ЭДС в режиме нагрузки, Вб

Предварительное число витков
 ,
,
где  - коэффициент формы поля;
- коэффициент формы поля;  - обмоточный коэффициент;
- обмоточный коэффициент;  - частота питающей сети, Гц.
- частота питающей сети, Гц.
Число витков обмотки катушки
Выбор плотности тока, 

Сечение эффективного проводника, мм2

где а – число параллельных ветвей обмотки, nэл – число элементарных проводников в одном эффективном.
Ширина зубца статора, м

Площадь паза, м2

где кз – коэффициент заполнения паза медью; Wк – количество витков в катушке обмотки.
Ширина паза в нижней части, м
Я выбрал трапецеидальные пазы.

где bщ1 – ширина открытия паза, м; hщ1 – высота открытия паза, м.
Ширина паза верхней части, м
где bс – припуск на расшлихтовку, м.
Высота паза в штампе, м

где hс – припуск на расшлихтовку, м.
Высота клиновой части паза, м
Полная высота паза, м

Площадь паза под обмотку в свету, м

Уточненный коэффициент заполнения паза

Высота ярма обода статора, м

Внешний диаметр сердечника ротора, м

Выбор воздушного зазора и расчет геометрии ротора.
Величина воздушного зазора, м

Диаметр ротора, м

Ширина магнита, м

Длина магнита, м
Высота магнита, м

Высота ярма обода ротора, м

Минимальное расстояние между магнитами, м

Внутренний диаметр обода ротора, м

Расчет проводимостей рассеяния ротора (магнитов)
Проводимость рассеяния фиктивного электромагнита, сердечник которого имеет ту же конфигурацию, что и постоянный магнит, Вб/А
где 
Коэффициент, учитывающий снижение потоков рассеяния из-за малой проницаемости магнитов и неравномерного распределения н.с. по высоте магнита
 ,
,
где 
Проводимость полюсов (на один полюс), Вб/А

Расчет магнитной цепи.
Расчет магнитной цепи производиться с учетом конструктивного исполнения ротора для нескольких значений ЭДС. Рекомендуемые значения выбираются в зависимости от Е0 , соответствующей индукции магнита в режиме холостого хода

Ширина полюсного наконечника, м

Для ротора с радиальным расположением магнитов без полюсного наконечника, ширина полюсного наконечника, м
vunivere.ru
РАСЧЕТ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК АСИНХРОННЫХ ДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Объектом исследования в настоящей лабораторной работе являются асинхронные двигатели с короткозамкнутым ротором (АДК).
Цель работы: изучение методов расчета параметров схемы замещения, параметров режима и пусковых характеристик АДК; исследование этих параметров для реальных АДК; закрепление навыков работы на ПЭВМ при расчетах по готовой программе.
АДК, благодаря своей простоте и надежности, являются наиболее распространенным промышленным потребителем электрической энергии. АДК подключаются к системе электроснабжения (СЭС) и используется в качестве привода промышленных механизмов.
Основными параметрами режима АДК являются: активная Р и реактивная Q мощности, потребляемые АДК из электрической сети, ток статорной обмотки I1, электромагнитный момент на валу АДК Мэ в установившемся режиме, равный моменту сопротивления механизма Ммех, частота вращения ротора АДК w, скольжение ротора АДК, равное
 (1)
(1)
где wс - синхронная частота вращения ротора АДК.
Схема замещения АДК представлена на рис.1. Параметрами схемы замещения являются R1, Xs1 - активное сопротивление и индуктивное сопротивление рассеяния статорной обмотки; R2, Xs2 - активное сопротивление и индуктивное сопротивление рассеяния обмотки ротора, приведенные к статорной обмотке; X12- индуктивное сопротивление взаимоиндукции между обмотками статора и ротора.
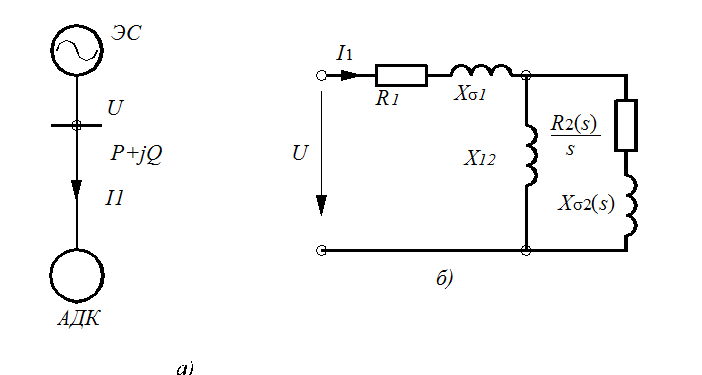
Рис.1. Схема подключения (а) и схема замещения (б) АДК
В схеме замещения АДК необходимо учитывать поверхностный эффект, т.е. вытеснение тока в обмотке ротора. Степень вытеснения тока определяется частотой наводимых в роторе токов, которая определяется скольжением двигателя.
Изменение сопротивлений эквивалентного обмотки ротора в схеме замещения за счет вытеснения тока хорошо описывается следующими зависимостями:
 (2)
(2)
 (3)
(3)
где R2п, Xs2п, R2c, Xs2с - активные и индуктивные сопротивления рассеяния обмотки ротора соответственно при пуске (s=1) и в синхронном режиме (s=0).
АДК характеризуется следующими каталожными данными:
Pн - номинальная мощность на валу двигателя, кВт;
Uн - номинальное напряжение, кВ;
cosjн - номинальный коэффициент мощности;
hн - номинальный коэффициент полезного действия, % ;
wн, wс - номинальная и синхронная частота вращения, об/мин;
Mп - кратность пускового (при s=1) момента;
Мм - кратность максимального момента;
Iп - кратность пускового тока.
Параметры схемы замещения и режима АДК удобно выражать в относительных единицах при следующих базисных условиях:
Sб=Sн - номинальная полная мощность АДК;
Uб=Uн - номинальное напряжение статорной обмотки АДК;
Mэ - электромагнитный момент (в виде исключения) целесообразно выражать в долях от номинального момента.
Основные параметрами режима АДК могут быть определены через параметры схемы замещения и скольжение по следующим выражениям:
 (4)
(4)
где  - сопротивление, сопряженное комплексному входному сопротивлению схемы замещения АДК в соответствии со схемой замещения (рис.1) равное:
- сопротивление, сопряженное комплексному входному сопротивлению схемы замещения АДК в соответствии со схемой замещения (рис.1) равное:
 (5)
(5)
Sн- номинальная полная мощность АДК, равная
 (6)
(6)
Зависимости от скольжения P(s), Q(s), I(s), M(s) при номинальном напряжении на выводах двигателя называются пусковыми характеристиками АДК.
Основными расчетными параметрами АДК также являются:
синхронное индуктивное сопротивление АДК
Xc= Xs1+X12 (7)
сверхпереходное индуктивное сопротивление АДК
 (8)
(8)
электромагнитная постоянная времени обмотки ротора при короткозамкнутой статорной обмотке
 (9)
(9)
где X2’ - индуктивное сопротивление обмотки ротора при короткозамкнутой статорной обмотке
 (10)
(10)
Расчетные параметры АДК X” и Т2’ зависят от скольжения в связи с вытеснением тока в обмотке ротора.
Параметрами схемы замещения являются следующие параметры: R1, R2п , R2c, Xs1, X12, Xs2п, Xs2с. Их необходимо определить через каталожные данные АДК. Активное сопротивление статорной обмотки можно определить, исходя из потерь мощности в этой обмотке в номинальном режиме. В относительных единицах R1=DPст.
Для АДК потери в статорной обмотке составляют относительно устойчивую долю (в среднем 0.3) от общих потерь активной мощности в номинальном режиме, поэтому
vunivere.ru
Ток возбуждения СД можно представить как геометрическую сумму двух составляющих:
 (34)
(34)
где Ifа - составляющая тока возбуждения, зависящая от активной составляющей тока статора, о.е.; Ifк- ток возбуждения в режиме работы СД фазокомпенсатором, когда ток статора можно считать реактивным, о.е.:
 (35)
(35)
где Ifо – ток возбуждения холостого хода СД при Uн. Ifо»0,435 о.е.
Из выражений (34), (35) следует, что в номинальном режиме
 (36)
(36)
где Ifан - активная составляющая тока возбуждения в номинальном режиме СД, о.е.
В режиме, отличном от номинального, имеем
 (37)
(37)
 (38)
(38)
Подставляя (35) и (38) в (34) получим:
 (39)
(39)
С учетом (32) можем записать выражение для функции If=f(a):
 (40)
(40)
Функция, обратная (40) a=f(If) называется U-образной характеристикой СД и отражает зависимость реактивной мощности, отдаваемой или потребляемой из сети, от тока возбуждения.

На величину реактивной мощности СД, как видно из (40), влияют текущая активная нагрузка двигателя, его номинальные параметры и рабочее напряжение на выводах двигателя.
1. Подготовить исходные данные в соответствии с вариантом задания.
2. Провести расчеты параметров и пусковых характеристик СДМР на ЭВМ.
3. Получить распечатку расчета.
4. Построить пусковые характеристики СДШП P=f(s), Q=f(s), I=f(s), M=f(s).
5. Исследовать влияния напряжения и нагрузки на валу двигателя на его U-образную характеристику:
- построить графики характеристики Q=f(If) при различных значениях напряжения на выводах двигателя Uсд и коэффициенте загрузки.
- используя полученные характеристики Q=f(If) при заданных U* и b построить графики зависимости If=f(U*) и If=f(b) при одном значении реактивной мощности двигателя в режиме перевозбуждения.
Ход работы.
1. Запустить на выполнение программу MCAD.
2. Загрузить в MCAD файл СХЕМА_СДМР.MCD.
3. Задать значения каталожных параметров синхронного двигателя согласно варианта (табл. 1) в соответствующих переменных.
4. Выполнить расчет параметров схемы замещения, убедиться, что погрешность расчета параметров Мв, Iп не превышает 0,001.
5. Убедиться, что расчетные значения параметров Iп, Мв, Мп совпадают с каталожными значениями.
6. Вывести на печать результаты расчетов параметров схемы замещения, пусковые и U-образные характеристики синхронного двигателя.
Отчет по работе должен содержать описание цели работы, распечатку результатов расчета, а также графики пусковых характеристик P=f(s), Q=f(s), I=f(s), M=f(s).В конце отчета должны быть написаны выводы по результатам исследований.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Вольдек А.И. Электрические машины. Л.; Энергия, 1978.
2. Гамазин С.И., Понаровкин Д.Б., Цырук С.А. Переходные процессы в электродвигательной нагрузке систем промышленного электроснабжения. М.; Московский энергетический институт, 1991.
3. Першина Л.М., Бак С.И., Першин Ю.М., Читипаховян С.П. Применение электродвигателей в нефтяной промышленности. М.; Недра, 1980.
ПРИЛОЖЕНИЕТаблица П3.
vunivere.ru
Устранить провалы в асинхронной моментной характеристике СД с шихтованным ротором можно путем включения обмотки возбуждения при пуске на дополнительное пусковое сопротивление. При значениях кратности сопротивления в цепи ротора Rfп/Rf ³ 4 провалы в асинхронной моментной характеристике исчезают. Таким образом, пусковое сопротивление обмотки возбуждения выполняет следующие функции: улучшает асинхронную моментную характеристику; позволяет увеличить скорость гашения магнитного поля СД; предотвращает перенапряжения в обмотке возбуждения, возникающие из-за большой скорости изменения тока возбуждения при отключении возбудителя.
Рабочее задание
1. Подготовить исходные данные в соответствии с вариантом задания.
2. Провести расчеты параметров и пусковых характеристик СДШП на ЭВМ.
3. Получить распечатку расчета.
4. Построить пусковые характеристики СДШП P=f(s), Q=f(s), I=f(s), M=f(s).
Ход работы.
1. Запустить на выполнение программу MCAD.
2. Загрузить в MCAD файл ПАРАМЕТРЫ_СДШП.MCD.
3. Задать значения каталожных параметров синхронного двигателя согласно варианта (табл. 1) в соответствующих переменных.
4. Выполнить расчет параметров схемы замещения, убедиться, что погрешность расчета параметров Мв, Iп не превышает 0,001, а расчетные значения параметров Iп, Мв, Мп совпадают с каталожными данными.
5. Построить графики характеристики M=f(s) при различных значениях Rп в системе MCAD.
6. Вывести на печать результаты расчетов параметров схемы замещения и пусковые характеристики синхронного двигателя.
Указания по оформлению отчета
Отчет по работе должен содержать описание цели работы, распечатку результатов расчета, а также графики пусковых характеристик P=f(s), Q=f(s), I=f(s), M=f(s).В конце отчета должны быть написаны выводы по результатам исследований.
Контрольные вопросы при защите работы
1. Какие обобщенные параметры СД характеризуются индуктивными сопротивлениями ?
2. Какие обобщенные параметры СД характеризуются электромагнитными постоянными времени ?
3. Как определить параметры пусковые характеристики СД через параметры схемы замещения ?
4. Как рассчитать параметры схемы замещения СДШП, являющиеся индуктивными сопротивлениями ?
5. Как рассчитать параметры схемы замещения СДШП, являющиеся активными сопротивлениями ?
РАСЧЕТ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК СИНХРОННЫХ
ДВИГАТЕЛЕЙ С МАССИВНЫМ ГЛАДКИМ РОТОРОМ
Объект исследования и цель работы
Объектом исследований в настоящей лабораторной работе является синхронный двигатель с массивным гладким ротором (СДМР).
Цель работы - изучение методов расчета параметров схемы замещения, обобщенных параметров и пусковых характеристик СДМР по каталожным данным, закрепление навыков работы на ПЭВМ и выполнения расчетов в пакете MCAD.
Общая характеристика СДМР
К СДМР относятся неявнополюсные синхронные двигатели (СД) со скоростью вращения ротора nс=3000 об/мин (серия СТД, СТМ).
Ротор СДМР представляет собой единую стальную поковку с выфрезерованными пазами для обмотки возбуждения. В отличие от СД с шихрованным ротором, имеющих сосредоточенную демпферную обмотку, у СДМР система демпферированых контуров распределена по всей бочке ротора.
СДМР используются в качестве приводов к центробежным насосам, компрессорам и вентиляторам. Пуск СДМР осуществляется в основном от полного (иногда сниженного) напряжения сети при короткозамкнутой обмотке возбуждения. Параметры СД удобно выражать в относительных единицах при следующих базисных условиях: Sб=Sн - номинальная полная мощность СД; Uб=Uн - номинальное напряжение СД. Электромагнитный момент (в виде исключения) целесообразно выражать в долях от номинального момента на валу двигателя.
Схема подключения при пуске СДМР от полного напряжения сети (а) и схемы замещения по продольной (б) и поперечной (в) осям ротора приведены на рис.3. Параметрами схемы замещения являются (далее везде в скобках даны идентификаторы соответствующих параметров, принятых в программе для ЭВМ):
vunivere.ru