Изобретение относится к электротехнике, в частности к электромагнитным двигателям, и может быть использовано для линейного перемещения подвижных объектов, например линейных манипуляторов технологического или производственного оборудования. Технический результат заключается в обеспечении непрерывного движения подвижного элемента. Двигатель содержит корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке. Якори тяговых электромагнитов и фиксаторы объединены пантографом. Между металлической рейкой и фиксирующими электромагнитами расположены фрикционные колодки с ферромагнитной накладкой. Пантограф обеспечивает сложение усилий тяговых электромагнитов, что приводит к увеличению тягового усилия двигателя. Применение фрикционных колодок обеспечивает надежную фиксацию металлической рейки фиксаторами. 3 ил.
Изобретение относится к электротехнике, в частности к электромагнитным двигателям, и может быть использовано для линейного перемещения подвижных объектов, например линейных манипуляторов технологического или производственного оборудования.
Известен электромагнитный двигатель (Патент РФ №2198262, опубл. 10.02.2003), содержащий неподвижную часть-индуктор и вращающуюся часть - укрепленные на валу якорь и коллектор, обмотка якоря укреплена на сердечнике, а концы обмотки соединены с изолированными от вала медными пластинами коллектора, подключенного к источнику напряжения. Индуктор изготовлен из сегментов электротехнической стали, укрепленных на основании из алюминиевых сплавов, вращающаяся часть выполнена из посаженных на вал колес с электромагнитами, взаимодействующими поочередно с индуктором. Вал установлен вертикально в подшипниках на кронштейнах.
Недостатками этого двигателя являются: прерывистое движение подвижного элемента, невысокое тяговое усилие, невысокая надежность.
Наиболее близким к предлагаемому техническому решению является электромагнитный двигатель, содержащий корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке (авторское свидетельство СССР №703883, кл. H02K 41/02, 1979).
Недостатками этого двигателя являются: прерывистое движение подвижного элемента, невысокое тяговое усилие, невысокая надежность. Техническая задача, на решение которой направлено изобретение, является повышение надежности устройства. Технический эффект, возникающий при решении поставленной технической задачи, состоит в обеспечении непрерывного перемещения подвижного элемента и увеличении тягового усилия и достигается тем, что в электромагнитном двигателе, содержащем корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке, согласно изобретению, в корпусе электродвигателя размещена дополнительная пара тяговых электромагнитов, тяговые электромагниты ориентированы вдоль направления перемещения подвижного элемента, якори тяговых электромагнитов и фиксаторы объединены пантографом, а между металлической рейкой и фиксирующими электромагнитами расположены фрикционные колодки с ферромагнитной накладкой.
Изобретение поясняется чертежами, где:
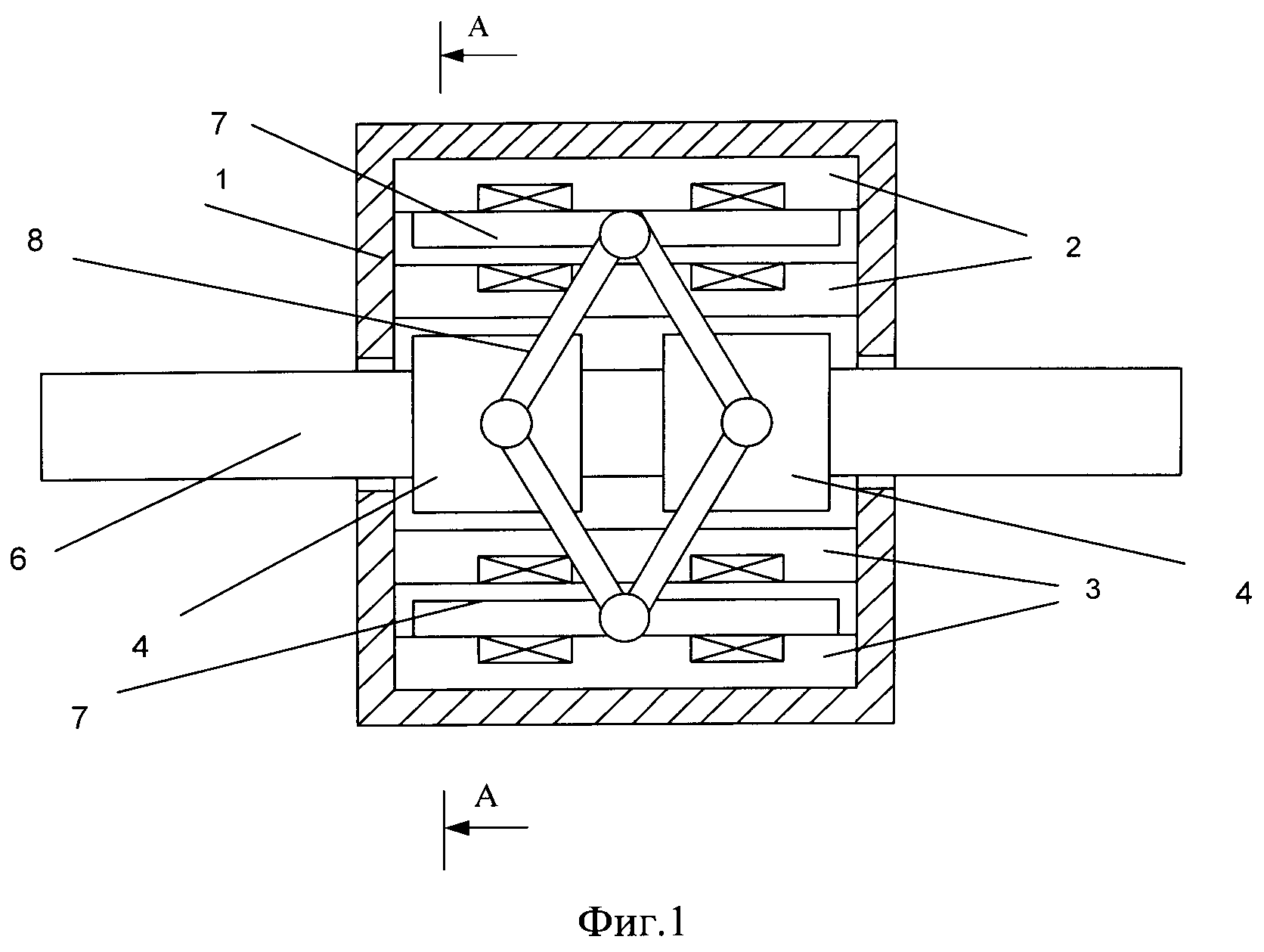
на фиг.1 показан предлагаемый электродвигатель, разрез общий вид,
на фиг.2 показан поперечный разрез фиксатора электродвигателя,
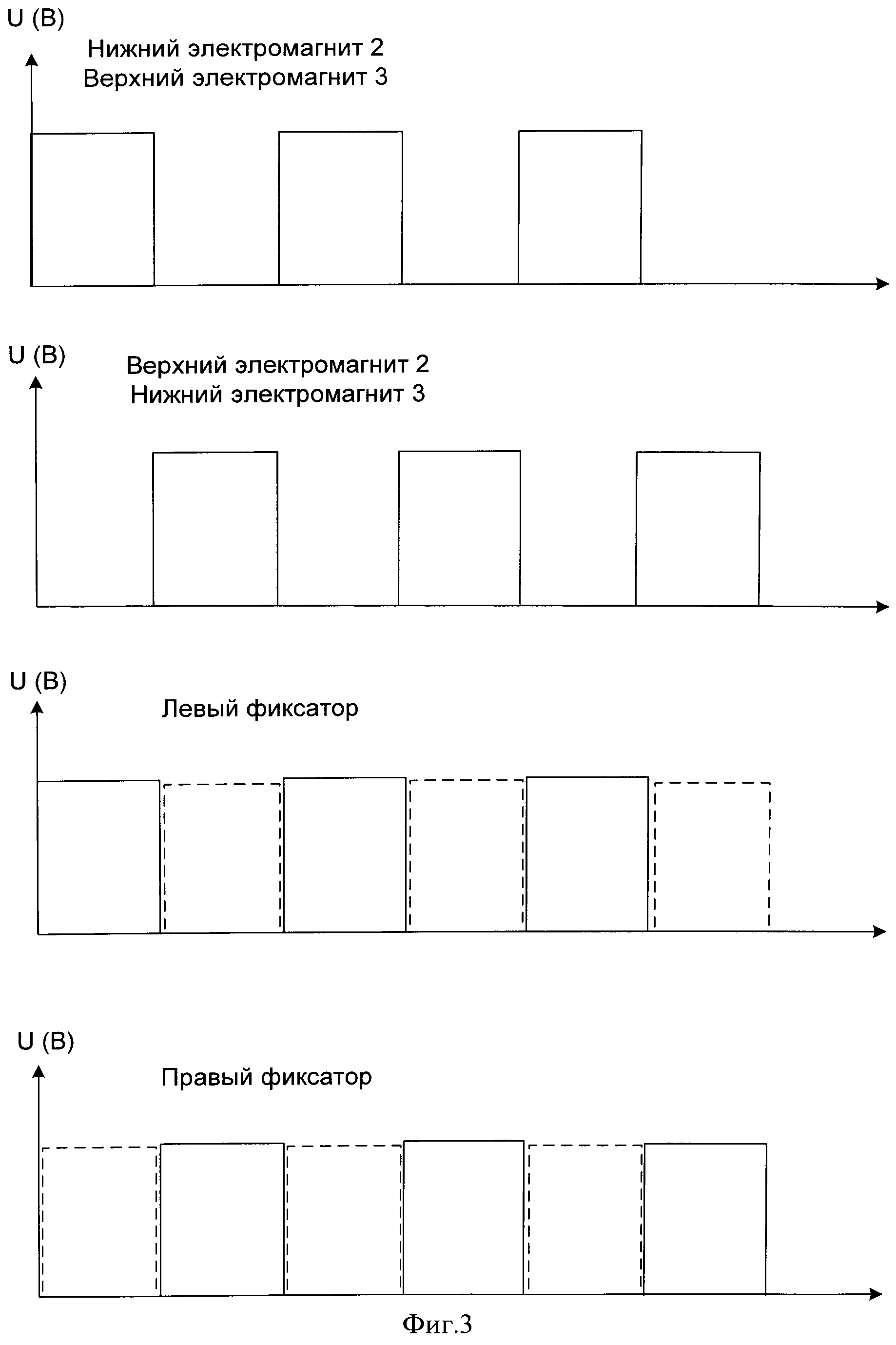
на фиг.3 показана последовательность импульсов питания тяговых электромагнитов и фиксаторов двигателя.
Линейный электромагнитный двигатель содержит корпус 1 с двумя парами тяговыми электромагнитов 2 и 3 и двумя фиксаторами 4 с фиксирующими электромагнитами 5, примыкающими к подвижной металлической рейке 6. Якори 7 тяговых электромагнитов и фиксаторы 4 шарнирно объединены пантографом 8. Между металлической рейкой 6 и фиксирующими электромагнитами 5 расположены фрикционные колодки 9 с ферромагнитными накладками 10. Ферромагнитные накладки 10 связаны стягивающими пружинами 11. Между корпусом фиксатора 4 и ферромагнитными накладками 10 расположены центрирующие пружины 12. Предлагаемый двигатель работает следующим образом. Подача напряжения на обмотки тяговых электромагнитов 2 и 3 приводит к перемещению их якорей 7. Напряжение подается на один электромагнит каждой пары, либо нижний электромагнит 2 и верхний электромагнит 3, либо верхний электромагнит 2 и нижний электромагнит 3. При этом якори 7 электромагнитов перемещаются, соответственно, либо навстречу друг другу, либо друг от друга. Одновременно фиксаторы, шарнирно связанные пантографом 8 с якорями электромагнитов, будут перемещаться в горизонтальном направлении, соответственно, друг от друга, или навстречу друг другу. Поочередное включение тяговых электромагнитов вызывает колебательное движение якорей 7 электромагнитов в вертикальном направлении, а фиксаторов 4 в горизонтальном.
Фиксаторы 4 электродвигателя выполнены нормально включенными. При обесточенных электромагнитах 5, пружины 11 обеспечивают постоянное нажатие фрикционных колодок 9 на металлическую рейку 6. Подача напряжения на электромагниты 5 приводит к перемещению ферромагнитных накладок колодок, разжиманию фрикционных колодок 9 и освобождению металлической рейки 6. Пружины 12 обеспечивают центрирование фиксатора относительно рейки 6 и выравнивание зазоров электромагнитов 5.
Поочередное разжимание фиксаторов 4, при их колебательном движении в горизонтальном направлении, приводит к непрерывному однонаправленному перемещению металлической рейки 6. Фиксатор должен быть зафиксирован относительно рейки 6 при совпадении требуемого направления движения рейки и фиксатора, и разжат при противоположных направлениях движения. На фиг.3 показана диаграмма напряжений питания электромагнитов и фиксаторов. Сплошной линией показано напряжение питания фиксаторов при движении влево, пунктирной - при движении вправо.
Применение пантографа в электродвигателе позволяет разместить в корпусе двигателя дополнительную пару тяговых электромагнитов, что увеличивает тяговое усилие. Кроме того, якори тяговых электромагнитов расположены соосно металлической направляющей, что уменьшает габариты двигателя и обеспечивает компактность конструкции.
Применение фрикционных колодок в фиксаторах увеличивает коэффициент трения между колодками и металлической направляющей, что повышает тяговое усилие двигателя и увеличивает долговечность конструкции. Колодки можно заменить после определенного износа. Кроме того, направляющая может изготавливаться из немагнитного материала, например из нержавеющей стали, что также обеспечит повышение надежности двигателя.
Электромагнитный двигатель, содержащий корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке, отличающийся тем, в корпусе электродвигателя размещена дополнительная пара тяговых электромагнитов, тяговые электромагниты ориентированы вдоль направления перемещения подвижного элемента, якори тяговых электромагнитов и фиксаторы объединены пантографом, а между металлической рейкой и фиксирующими электромагнитами расположены фрикционные колодки с ферромагнитной накладкой.
www.findpatent.ru
ОПИСАНИЕ
ИЗОБРЕТЕН ИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советсиик
Социалистичесник
Реслублии (ii)888291 (6l ) Дополнительное к авт. саид-sy и" 744862 (22) Заявлено 25. 12 ° 78 (21) 2701308Л4-07 с присоединением заявки РЙ (23) Приоритет (5l)M. Кл.
Н 02 К 33/02
1Ъоударотевнный комитет
СССР
Опубликовано 07.12 ° 81 Бюллетень Ю 45 до делам изобретений и открытий (53) УДК 621 ° 313. .33(088 .8) Дата опубликования описания 07 . 12. 81 (72) Автор изобретения
Б. Н. Гурницкий
Алтайский научно-исследовательский институт технологии машиностроения (7l ) Заявитель (54) ВЕРТИКАЛЬНЫЙ ЛИНЕЙНЫЙ ЗЛЕКТРОИАГНИТНЫЙ
ДВИГАТЕЛЬ
В основном авт, св. У 744862 описан вертикальный линейный электромагнитный двигатель, содержащий обмотку, магнитопровод, образованный цилиндрическим ярмом, верхним кольцевым полюсом и нижним полюсом, снабженным ферромагнитным цилиндром, охватывающим немагнитную направляющую втулку с размещенным в ней ферромагнитным якорем, и немагнитную цилиндрическую вставку, расположенную между верхним полюсом и немаг-. нитной направляющей втулкой 1) .
Недостатком этого устройства является невозможность сохранения неизменного положения якоря при появлении возмущающих факторов (увеличение или уменьшение напряжения, из" менение нагрузки на якоре, изменение температуры двигателя и т.п.).
Целью изобретения является обеспечение фиксации положения якоря.
Поставленная цель достигается тем, что. двигатель дополнительно снабжен примыкающей к нижнему полюсу тормозной кат шкой, охватывающей направляющую немагнитную втулку
1О и размещенной в цилиндрическом корпусе, состоящем из двух частей в виде полуцилиндров, одна из которых выполнена из диэлектрического материала, а другая из ферромагнитного, причем феРРомагнитная часть соединена с нижним кольцевым полюсом и в месте примыкания к якорю имеет выступ в виде полукольца..
На фиг. 1 показан продольный разрез двигателя; на фиг. 2 - разрез
А-А на фиг. 1;на фиг. 3 - схема управления.
Рабочее положение двигателявертикальное; Ферромагнитный корпус
91 1
Вертикальный линейный электромагнитный двигатель по авт. св. Ю 744862, отличающийся тем, что, с целью обеспечения фиксации положения якоря, он дополнительно снабжен примыкающей к нижнему полюсу тормоз-ной катушкой, охватывающей направляющую немагнитную втулку и размещенной в цилиндрическом корпусе, состоящем из двух частей в виде полуцилиндров, одна из которых выполнена иэ диэлектрического материала, а другая из ферромагнитного, причем ферромаг50 нитная часть соединена с нижним кольцевым полюсом и в месте примыкания к якорю имеет выступ в виде полукольца.
3 8882
1 соединен с верхним 2 и нижним 3 х полюсами, выполненными в виде ферро- . магнитных колец. Нижний полюс снабжен ферромагнитным цилиндром 4, охватывающим немагнитную направляющую втулку .5. Указанные элементы образуют замкнутый объем, внутри которого помещается силовая катушка 6 двигателя. Подвижной частью двигателя является цилиндрический ферромагнитный 10 якорь 7. К нижнему полюсу 3 примыкает снаружи тормозная катушка 8, охва. тывающая направляющую втулку 5 и размещенная в цилиндрическом корпусе, состоящем из диэлектрической части 9, у и ферромагнитной части 10, которая примыкает к нижнему полюсу 3. В месте примыкания к якорю 7 ферромагнитная часть 10 корпуса тормозной катушки имеет выступ в виде полукольца 11. -
Двигатель работает следующим образом.
При отсутст вии тока в катушках 6 и 8 двигателя якорь 7 под действием собственного веса занимает крайнее нижнее положение. При подаче тока в силовую катушку 7 якорь втягивается внутрь двигателя и занимает. заданное положение, соответствующее величине тока и результирующей нагрузке на якоре. Для того, чтобы удержать якорь 7 в заданном положении, подают ток в тормозную катушку.
8, в результате чего на якорь действует сила электромагнитного притяжения, направленная перепендикулярно оси якоря в сторону ферромагнитной части 1О корпуса тормозной катушки.
Координация переключений катушек двигателя осуществляется в соответствии со схемой, изображенной на фиг. 2, Переменное напряжение, подаваемое от источника стабилизированного напряжения (на фигурах не показан), поступает на регулятор напряжения (РН), от него в силовую катушку (СК) ° Последовательно с силовой катушкой включена первичная обмотка дифференцирующего трансформатора (ДТ). Если ток в цепи СК постоянен, напряжение на выходе ДТ равно нулю, электронный коммутатор (ЭК) открыт и ток от источника постоянного напряжения поступает в тормозную катушку (ТК), которая стопорит якорь в эаданнсм положении. Если ток в цепи силовой катушки (СК) изменяется на выходе ДТ появляется сигнал запирающии ЭК, вследствие чего ток в ТК не поступает. При этом положение якоря зависит только от величины тока СК и нагрузки на якоре и может изменяться вплоть до занятия якорем нового заданного положения. К этому моменту ток в цепи СК перестает изменяться и якорь стопорится электромагнитными силами ТК.
Установка тормозной катушки позволяет получить жесткую характеристику положения якоря, т.е. при поступлении возмущения на двигатель якорь двигателя будет оставаться в заданном положении до тех пор, пока не возникнет потребность перевести его в новое заданное положение, что особенно важно при дозировании газообразных, жидких и сыпучих материалов в непрерывных производственных процессах.
Снабжение ферромагнитной части корпуса тормозной катушки в месте примыкания к якорю выступом в виде полукольца дает возможность повысить силу притяжения катушки без увеличения ее габаритов.
Двигатель может быть использован в любой отрасли народного хозяйства, где используются доэирующие устройства с электроприводом.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР
N 744862 кл H 02 K 33/02 1977



www.findpatent.ru
Изобретение относится к ударным инструментам с электромагнитным приводом. В немагнитном корпусе 1 размещены цилиндрический статор 3, катушка 4, ограниченная с торцов нижним 5 и верхним 6 ферромагнитными полюсами, и якорь 7 из ферромагнитного материала. Внутренняя поверхность верхнего ферромагнитного полюса 6 сопряжена по диаметру с боковой поверхностью якоря 7 с образованием воздушного зазора. На внутренней поверхности полюса 6 по всей его длине с постоянным шагом выполнены кольцевые проточки, образующие кольцевые выступы 12, а на боковой поверхности якоря 7 по длине верхнего полюса 6 выполнены ответные кольцевые выступы 11. Шаг кольцевых выступов 11 соответствует шагу кольцевых выступов 12. Нижняя торцевая поверхность якоря 7 образует с нижним полюсом 5 рабочий воздушный зазор. Обеспечивается упрощение конструкции и повышение стабильности энергии удара линейных электромагнитных двигателей ударного действия. 1 ил.
Изобретение относится к электромагнитным машинам ударного действия и может быть использовано в машиностроении при производстве электромагнитных прессов, молотов и других ударных импульсных устройств с поступательным движением рабочих органов.
Известен линейный электромагнитный двигатель ударного действия [RU 2192346 C2], состоящий из статора, включающего катушку, магнитопровод и направляющую, внутри которой размещается боек, фиксируемый возвращающим и тормозящим упругими элементами (пружинами), что обеспечивает максимальный запас магнитной энергии в катушке.
Недостатком указанной конструкции электромагнитного двигателя является нестабильность работы в области низких частот, связанная со сложностью синхронизации вынуждающих воздействий тяговых импульсов катушки и частоты собственных колебаний упругих элементов, а также низкая энергия удара при нанесении одиночных ударов.
Известен линейный электромагнитный двигатель ударного действия с удержанием якоря [RU 2111847 С1], состоящий из корпуса с размещенными в нем магнитопроводом с катушкой, к которой жестко примыкает ферромагнитный кольцевой полюс, возвратной пружины, подпружиненной направляющей втулки с установленными в ней бойком, ферромагнитным буфером и буксой с рабочим инструментом. Характерной особенностью линейных электромагнитных двигателей, работающих при относительно небольших рабочих зазорах и обладающих высокой индуктивностью цепи, является то, что время движения бойка значительно меньше времени нарастания тока в цепи обмотки до установившегося значения. Поэтому несомненным преимуществом указанной конструкции является повышение энергии удара за счет удержания якоря на этапе трогания, однако существенным недостатком является нестабильность энергии удара, связанная с тем, что между ферромагнитными поверхностями якоря и буфера в начале каждого цикла возникает дополнительное усилие, обусловленное остаточным намагничиванием, оказывающее влияние на усилие удержание якоря и приводящее к нестабильной энергии удара.
Известна также конструкция однообмоточного линейного электромагнитного двигателя ударного действия, входящего в состав электропривода возвратно-поступательного движения [SU 1136294 A1, который является наиболее близким аналогом предлагаемого технического решения (прототип). Этот линейный электромагнитный двигатель ударного действия содержит размещенные в немагнитном корпусе цилиндрический статор с катушкой, ограниченной с торцов верхним и нижним полюсами, выполненными в виде ферромагнитных колец, ферромагнитный якорь, возвратную пружину и устройство удержания в виде жестко соединенного с немагнитным корпусом управляемого электромагнита, полюс которого обращен к торцевой части якоря. Такое техническое решение позволяет увеличить удельную энергию удара в 2-3 раза.
Недостатками указанного электромагнитного двигателя с устройством удержания в виде дополнительно устанавливаемого управляемого электромагнита является нестабильность энергии удара, обусловленная остаточным намагничиванием удерживающего электромагнита, а также сложность исполнения.
Задачей предлагаемого изобретения является упрощение конструкции и повышение стабильности энергии удара линейного электромагнитного двигателя ударного действия.
Указанная задача достигается тем, что в линейном электромагнитном двигателе ударного действия, содержащем размещенные в немагнитном корпусе цилиндрический статор с катушкой, ограниченной с торцов нижним и верхним ферромагнитными полюсами, якорь, подшипники скольжения и возвратную пружину, на якоре и на сопряженной с ним по диаметру внутренней поверхности верхнего ферромагнитного полюса выполнены поперечные кольцевые проточки, образующие кольцевые выступы.
На чертеже показана конструкция предлагаемого линейного электромагнитного двигателя ударного действия на начальном этапе движения в режиме удержания якоря.
Предлагаемый линейный электромагнитный двигатель ударного действия содержит размещенные в немагнитном корпусе 1 с крышкой 2 цилиндрический статор 3, катушку 4, ограниченную с торцов нижним 5 и верхним 6 ферромагнитными полюсами, якорь 7 из ферромагнитного материала, установленный с возможностью осевого перемещения, подшипники скольжения 8, 9 и возвратную пружину 10. Внутренняя поверхность верхнего ферромагнитного полюса 6 сопряжена по диаметру с боковой поверхностью якоря 7. Место сопряжения поверхностей образует нерабочий воздушный зазор Δ. На внутренней поверхности верхнего ферромагнитного полюса 6 по всей его длине с постоянным шагом выполнены кольцевые проточки, образующие кольцевые выступы 12. На боковой поверхности якоря 7 по длине верхнего ферромагнитного полюса 6 выполнены ответные кольцевые выступы 11. Шаг кольцевых выступов 11 на якоре 7 соответствует шагу кольцевых выступов 12 верхнего ферромагнитного полюса 6. Нижняя (рабочая) торцевая поверхность якоря 7 образует с нижним ферромагнитным полюсом 5 рабочий воздушный зазор δ.
Линейный электромагнитный двигатель ударного действия работает следующим образом. В исходном состоянии якорь 7 под действием усилия возвратной пружины 10 находится в крайнем верхнем положении, т.е. верхняя торцевая часть якоря плотно поджата к немагнитному корпусу 1.
При подаче на катушку 4 импульса напряжения по мере нарастания тока в магнитной цепи возбуждается магнитный поток Ф, который последовательно замыкается через сечения цилиндрического статора 3, верхнего ферромагнитного полюса 6, кольцевых выступов 12, нерабочего воздушного зазора Δ, кольцевого выступа 11, якоря 7, рабочего воздушного зазора δ, нижнего ферромагнитного полюса 5 и цилиндрического статора 3.
В начальный момент протекания тока по катушке 4 электромагнитное усилие удержания Fy, возникающее между кольцевыми выступами 11, 12, вызванное прохождением магнитного потока Ф через технологический зазор Δ, превышает усилие Fδ, возникающее в рабочем воздушном зазоре δ, т.е. Fy>Fδ, и якорь 7 остается некоторое время неподвижным.
По мере нарастания тока в цепи катушки 4 и увеличения основного магнитного потока Ф происходит насыщение кольцевых выступов 11, 12, что приводит к перераспределению электромагнитных усилий Fδ и Fy, действующих на якорь 7. Начиная с момента времени, когда усилие в рабочем зазоре δ превысит усилие удержания, Fδ>Fy, а магнитная система двигателя обеспечит необходимый запас магнитной энергии, происходит отрыв якоря 7 и ускоренное его перемещение. На интервале движения якоря усилие удержания Fy=0.
При отключении импульса напряжения после завершения рабочего хода якорь 7 под действием усилия возвратной пружины 10 возвращается в исходное состояние.
Выполнение на внутренней поверхности верхнего ферромагнитного полюса 6 и боковой поверхности якоря 7 поперечных кольцевых выступов 11, 12 обеспечивает бесконтактное электромагнитное удержание якоря 7 в начале рабочего хода. Это позволяет повысить стабильность энергии удара якоря 7 и упростить конструкцию линейного электромагнитного двигателя, так как удержание осуществляется электромагнитными силами катушки 4 без использования дополнительных устройств. Изменением количества кольцевых выступов 11, 12 и их размеров можно регулировать начальное усилие удержания якоря 7 и, как следствие, энергию удара.
Выполнение линейного электромагнитного двигателя ударного действия с поперечными кольцевыми проточками на якоре и на сопряженной с ним по диаметру боковой поверхности верхнего ферромагнитного полюса обеспечивает прохождение основной части магнитного потока на этапе трогания через образовавшиеся кольцевые выступы, что приводит к бесконтактному удержанию якоря на этапе трогания без использования дополнительных устройств удержания и, таким образом, к упрощению конструкции и повышению стабильности энергии удара линейного электромагнитного двигателя ударного действия.
Линейный электромагнитный двигатель ударного действия, содержащий размещенные в немагнитном корпусе цилиндрический статор с катушкой, ограниченной с торцов нижним и верхним ферромагнитными полюсами, якорь, возвратную пружину и подшипники скольжения, отличающийся тем, что на внутренней поверхности верхнего ферромагнитного полюса выполнены с постоянным шагом по длине полюса кольцевые выступы, при этом на боковой поверхности якоря, сопряженной по диаметру с верхним ферромагнитным полюсом, образованы ответные кольцевые выступы с шагом, соответствующим шагу кольцевых выступов верхнего полюса.
www.findpatent.ru
Союз Советскик
Социапистическии
Республик
ОПИСАНИЕ
M3OSPETE Н ИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
„„744864
4
«ъ г
„«г г (61) Дополнительное к авт. свид-ву— (22)ЗаЬвлено 20.02.78 (21) 2581277/24-07 .с присоединением заявки рй. (23) Приоритет
Опубликовано 07.12.82 Бюллетень № 45
Дата опубликования описания 07.12.82 (51) М. Кл.
Н 02 К 41/02
Н 02 К 37/00
3Ъоударстааииый комитет
llo делам изооретеиий и открытий (53) УДК 621.313..3(088.8) (72) Авторы изобретения
А. А. Афонин, В. И. Бондаренко, А. К. Вовк, В. Г. Савельев и 3. И. Дударенко
Запорожский машиностроительный институт им. В.Я.кубаря и Ийститут электродинамики АН Украинской ССР (71) Заявители (54) ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ
Изобретение относится к электромашиностроению N может быть использовано в робототехнике, в автоматичесKNx системах позиционирования, в механизмах возвратно-поступательного движения рабочего органа.
Известен линейный шаговый двигатель, содержащий цилиндрический статор с запрессованными стальными коль о цами, между которыми расположены катушки обмоток, питаемые периодическими однополярными импульсами тока, безобмоточный якорь с явно выраженными полюсами, тяry и расположенную на ней возвратную пружину, причем в электродвигателе применены две системы обмоток статора, одна из которых обеспечивает при импульсе тока перемещение тяги, а другая - удерживает 2о тягу после перемещения ее на заданный шаг. Тяга набрана иэ эластичных стержней, расположенных по образующей, цилиндра (1 3.
Известное устройство имеет ограниченное линейное перемещение исполнительного органа и невысокую производительност ь.
Наиболее близким по технической сущности к изобретению является устройство, содержащее статор с кольцевыми магнитными полюсами и между ними независимо одна от другой включаемые катушки возбуждения, из которых каждые две соседние создают встречно направленные магнитные поля, и якорь, перемещающийся вдоль корпуса, выполненный в виде ферромагнитного стержня с зубцами, образованными чередованием цилиндрических и конусных участков, причем шаг магнитных полюсов и шаг зубцов якоря выбран различным (2).
В предлагаемом двигателе, с целью увеличения тяговых усилий двигателя, повышая КПД и уменьшения габаритов, статор разделен немагнитными кольцами на ферромагнитные секции парных
3 74486 катушек с согласными магнитными полями в полюсе между катушками, причем полюсное деление секции равно шагу зубцов якоря.
Магнитные полюса статора снабжены кольцевыми конусными приливами, ширина которых равна или меньше длины цилиндрического участка якоря, а угол конусности прилива составляет 5-12 .
На фиг, 1 показан двигатель,,про- 1в дальный разрез; на фиг. 2 - полюс с магнитным приливом.
Устройство содержит статор 1 с соленоидными катушками 2-7 и кольцевыми магнитными полюсами 8-16. Якорь 17 расположен с возможностью линейного перемещения в статоре 1. Статор . разделен немагнитными кольцами 18 на ферромагнитные секции парных катушек 2 и 3, 4 и 5 и т. д. На магнит- 20 ных полюсах 8-16 установлены кольцевые конусные магнитные приливы 19.
На фиг. 2 показаны u — длина цилиндрического участка зубца якоря„
- ширина полюсного наконечника 25 статора, с — ширина прилива, oLугол конусности прилива.
Устройство работает следующим образом.
При перемещении якоря 1g вправо 30 включаются катушки 2 и 3, создавая согласно направленные магнитные потоки в полюсе 15. Под действием элект" ромагнитной силы якорь 17 стремится занять положение, соответствующее минимуму энергии, и перемещается вправо. Магнитные приливы 19 позволяют уменьшить магнитную проводимость в начальный момент движения якоря, что увеличивает тяговое усилие и обе- в спечивает плавность перемещения яко4 4 ря 17 до положения, когда цилиндрические участки зубцов якоря установятся под кольцевыми магнитными полюсами 14, 15, 16. Для дальнейшего перемещения включаются следующие две катушки 4 и 5 и т, д.
Формула изобретения
), Линейный электромагнитный двигатель, содержащий статор с катушками и кольцевыми магнитными полюсами с наконечниками и якорь в виде Ферромагнитного стержня с зубцами, образованными чередованием цилиндрических и конусных участков, равномерно распределенных по его длине, о т л и чающий с я тем, что, с целью увеличения тяговых усилий и КПД, статор разделен немагнитными кольцевыми прокладками на секции, каждая из которых содержит пару катушек, включенных встречно, причем полюсное деление секции равно шагу зубцов якоря, а длина цилиндрических участков зубцов якоря равна ширине полюсного наконечника стержня.
2. Двигатель по и. 1, о т л ич а ю шийся тем, что магнитные полюса статора снабжены кольцевыми конусными магнитными приливами, ширина которых не более длины цилиндрического участка якоря, а угол конусности прилива составляет 5-12
Источники информации, принятые во внимание при акспертизе . l. Авторское свидетельство СССР
155217, кл, Н 02 K 41/02, 1966.
2. Патент ФРГ М 1286638, кл 21 q, 3, 1969.
744864
Фиа й
Заказ 10620/9
Тираж 721 Подписное
ВНИИПМ ГосударственногЬ комитета СССР по делам изобретений и открытий
113035, Москва, N-35, Раушская наб., д. 4/5
Филиал ППП "Патент", r. Ужгород, ул. Проектная, 4
Составитель 3. Горник
Редактор E. ХейФиц Техред Й. Кастелевич Корректор Н. Король




www.findpatent.ru
Изобретение относится к электротехнике, в частности к электромагнитным двигателям, и может быть использовано для линейного перемещения подвижных объектов, например линейных манипуляторов технологического или производственного оборудования.
Известен электромагнитный двигатель (Патент РФ №2198262, опубл. 10.02.2003), содержащий неподвижную часть-индуктор и вращающуюся часть - укрепленные на валу якорь и коллектор, обмотка якоря укреплена на сердечнике, а концы обмотки соединены с изолированными от вала медными пластинами коллектора, подключенного к источнику напряжения. Индуктор изготовлен из сегментов электротехнической стали, укрепленных на основании из алюминиевых сплавов, вращающаяся часть выполнена из посаженных на вал колес с электромагнитами, взаимодействующими поочередно с индуктором. Вал установлен вертикально в подшипниках на кронштейнах.
Недостатками этого двигателя являются: прерывистое движение подвижного элемента, невысокое тяговое усилие, невысокая надежность.
Наиболее близким к предлагаемому техническому решению является электромагнитный двигатель, содержащий корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке (авторское свидетельство СССР №703883, кл. H02K 41/02, 1979).
Недостатками этого двигателя являются: прерывистое движение подвижного элемента, невысокое тяговое усилие, невысокая надежность. Техническая задача, на решение которой направлено изобретение, является повышение надежности устройства. Технический эффект, возникающий при решении поставленной технической задачи, состоит в обеспечении непрерывного перемещения подвижного элемента и увеличении тягового усилия и достигается тем, что в электромагнитном двигателе, содержащем корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке, согласно изобретению, в корпусе электродвигателя размещена дополнительная пара тяговых электромагнитов, тяговые электромагниты ориентированы вдоль направления перемещения подвижного элемента, якори тяговых электромагнитов и фиксаторы объединены пантографом, а между металлической рейкой и фиксирующими электромагнитами расположены фрикционные колодки с ферромагнитной накладкой.
Изобретение поясняется чертежами, где:
на фиг.1 показан предлагаемый электродвигатель, разрез общий вид,
на фиг.2 показан поперечный разрез фиксатора электродвигателя,
на фиг.3 показана последовательность импульсов питания тяговых электромагнитов и фиксаторов двигателя.
Линейный электромагнитный двигатель содержит корпус 1 с двумя парами тяговыми электромагнитов 2 и 3 и двумя фиксаторами 4 с фиксирующими электромагнитами 5, примыкающими к подвижной металлической рейке 6. Якори 7 тяговых электромагнитов и фиксаторы 4 шарнирно объединены пантографом 8. Между металлической рейкой 6 и фиксирующими электромагнитами 5 расположены фрикционные колодки 9 с ферромагнитными накладками 10. Ферромагнитные накладки 10 связаны стягивающими пружинами 11. Между корпусом фиксатора 4 и ферромагнитными накладками 10 расположены центрирующие пружины 12. Предлагаемый двигатель работает следующим образом. Подача напряжения на обмотки тяговых электромагнитов 2 и 3 приводит к перемещению их якорей 7. Напряжение подается на один электромагнит каждой пары, либо нижний электромагнит 2 и верхний электромагнит 3, либо верхний электромагнит 2 и нижний электромагнит 3. При этом якори 7 электромагнитов перемещаются, соответственно, либо навстречу друг другу, либо друг от друга. Одновременно фиксаторы, шарнирно связанные пантографом 8 с якорями электромагнитов, будут перемещаться в горизонтальном направлении, соответственно, друг от друга, или навстречу друг другу. Поочередное включение тяговых электромагнитов вызывает колебательное движение якорей 7 электромагнитов в вертикальном направлении, а фиксаторов 4 в горизонтальном.
Фиксаторы 4 электродвигателя выполнены нормально включенными. При обесточенных электромагнитах 5, пружины 11 обеспечивают постоянное нажатие фрикционных колодок 9 на металлическую рейку 6. Подача напряжения на электромагниты 5 приводит к перемещению ферромагнитных накладок колодок, разжиманию фрикционных колодок 9 и освобождению металлической рейки 6. Пружины 12 обеспечивают центрирование фиксатора относительно рейки 6 и выравнивание зазоров электромагнитов 5.
Поочередное разжимание фиксаторов 4, при их колебательном движении в горизонтальном направлении, приводит к непрерывному однонаправленному перемещению металлической рейки 6. Фиксатор должен быть зафиксирован относительно рейки 6 при совпадении требуемого направления движения рейки и фиксатора, и разжат при противоположных направлениях движения. На фиг.3 показана диаграмма напряжений питания электромагнитов и фиксаторов. Сплошной линией показано напряжение питания фиксаторов при движении влево, пунктирной - при движении вправо.
Применение пантографа в электродвигателе позволяет разместить в корпусе двигателя дополнительную пару тяговых электромагнитов, что увеличивает тяговое усилие. Кроме того, якори тяговых электромагнитов расположены соосно металлической направляющей, что уменьшает габариты двигателя и обеспечивает компактность конструкции.
Применение фрикционных колодок в фиксаторах увеличивает коэффициент трения между колодками и металлической направляющей, что повышает тяговое усилие двигателя и увеличивает долговечность конструкции. Колодки можно заменить после определенного износа. Кроме того, направляющая может изготавливаться из немагнитного материала, например из нержавеющей стали, что также обеспечит повышение надежности двигателя.
Электромагнитный двигатель, содержащий корпус с тяговыми электромагнитами и двумя подвижными фиксаторами с фиксирующими электромагнитами, примыкающими к металлической рейке, отличающийся тем, в корпусе электродвигателя размещена дополнительная пара тяговых электромагнитов, тяговые электромагниты ориентированы вдоль направления перемещения подвижного элемента, якори тяговых электромагнитов и фиксаторы объединены пантографом, а между металлической рейкой и фиксирующими электромагнитами расположены фрикционные колодки с ферромагнитной накладкой.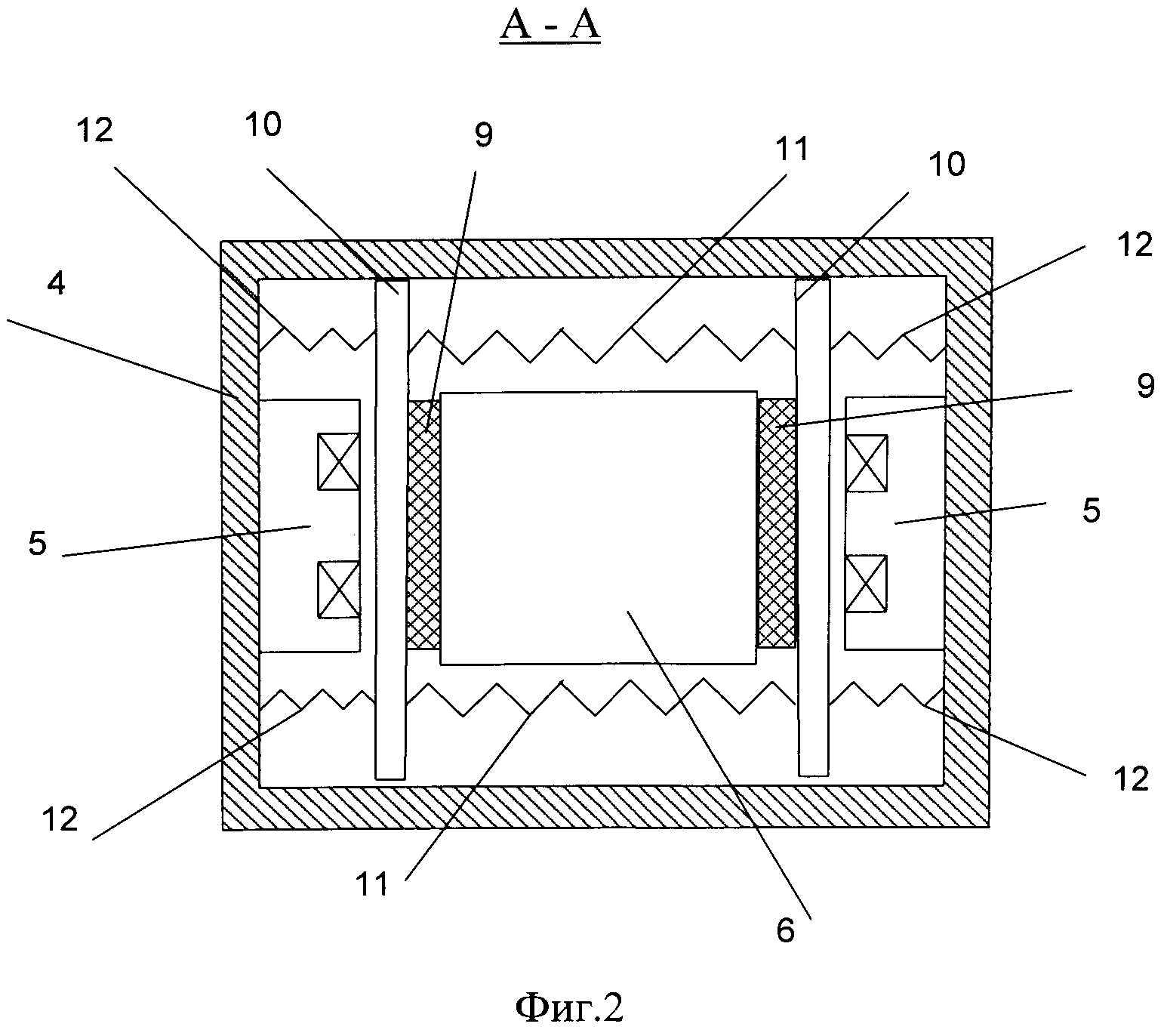
edrid.ru
Изобретение относится к электротехнике и может быть использовано в устройствах ударного действия с линейным электромагнитным двигателем, в котором рабочий ход якоря осуществляется за счет единственной системы обмоток, а его возврат - под действием механического усилия, например под действием усилия возвратной пружины. Для увеличения удельной энергии удара при повышении КПД двигателя первый импульс напряжения подают в период рабочего хода якоря, а второй и последующие импульсы напряжения в период холостого хода с периодом не более суммарного времени рабочего и холостого хода, при этом импульс подают в момент времени, соответствующий воздушному зазору  вкл, при котором смена знака скорости якоря на противоположный происходит в точке с координатой положения якоря, равной начальному воздушному рабочему зазору н, причем вкл< н. 2 ил.
вкл, при котором смена знака скорости якоря на противоположный происходит в точке с координатой положения якоря, равной начальному воздушному рабочему зазору н, причем вкл< н. 2 ил.
Изобретение относится к электротехнике и может быть использовано в устройствах ударного действия с линейным электромагнитным двигателем, в котором рабочий ход якоря осуществляется за счет единственной системы обмоток, а его возврат под действием механического усилия, например, под действием усилия возвратной пружины.
Известен способ управления однообмоточным линейным электромагнитным двигателем, состоящий в том, что напряжение на обмотку подается в период рабочего хода при оптимальном начальном воздушном зазоре и неподвижном якоре, а по завершении рабочего хода якоря источник питания отключают (см., например, П.С. Туровский, А.В.Фролов // Расчет, конструирование и создание электромагнитных генераторов силовых импульсов. - Фрунзе: Илим. 1984. - 128 с., стр. 40). Недостатком известного способа управления является низкая удельная энергия удара и КПД линейного электромагнитного двигателя. Известен также способ управления однообмоточным двигателем колебательного движения, заключающийся в том, что периодически изменяют полярность питающего напряжения, при этом в каждом полупериоде изменения питающего напряжения прерывают питание обмотки двигателя (авт.св. N 1601729 Способ управления однообмоточным двигателем колебательного движения. Опубл. в Б.И., 1990, N 39). Однако недостатком данного способа управления является также низкая удельная энергия удара. Наиболее близким по технической сущности к предлагаемому изобретению аналогом является способ управления линейным электромагнитным двигателем однообмоточного типа с удержанием якоря, заключающейся в том, что обмотку электромагнитного двигателя подключают к источнику питания, а якорь неподвижно удерживают, причем движение якорь под действием этой обмотки получает, когда величина тока трогания достигнет установленного значения, а электромагнитное усилие превысит усилие удержания якоря. По завершении рабочего хода источник питания отключают, а якорь при обесточенной обмотке совершает холостой ход (Н. П. Ряшенцев, Г.Г. Угаров, А.В. Львицын. Электромагнитные прессы. - Новосибирск: Наука. Сиб. отд-ние, 1989. - 215 с., стр. 99, 169). Однако данный способ управления в свою очередь ведет к увеличению линейных размеров, массы и усложнению конструкции за счет использования вспомогательных устройств для удержания якоря на этапе трогания в период рабочего и холостого хода, что также снижает удельную энергию удара. К основным недостаткам данного способа также следует отнести повышенный шум в работе, вызванный механическим взаимодействием якоря и удерживающего устройства, его низкую надежность, регулирование в узком диапазоне энергии удара. Техническая задача, решаемая в предлагаемом изобретении, заключается в увеличении удельной энергии удара при повышении КПД двигателя. Поставленная задача решается тем, что на обмотку двигателя подают импульс напряжения, причем, первый импульс напряжения подают в период рабочего хода якоря, а второй и последующие импульсы напряжения в период холостого хода с периодом не более суммарного времени рабочего и холостого хода. Таким образом, сущность изобретения заключается в том, что при возврате якоря под действием механического усилия (например, усилия возвратной пружины), до момента времени, когда якорь займет начальное положение, на обмотку подают напряжение, под действием которого в цепи обмотки начинает протекать ток, величина которого к моменту времени начала рабочего хода якоря следующего цикла успевает достичь предельного значения, чем обеспечивается увеличение удельной энергии удара без увеличения веса двигателя, повышение КПД и надежности. При этом для увеличения начального тока трогания якоря двигателя не требуется специальных устройств удержания, увеличивающих массу и снижающих удельные показатели. Предлагаемый способ осуществляется следующим образом. В момент включения первый импульс напряжения подают на обмотку двигателя в период рабочего хода якоря, а затем отключают его. Второй импульс напряжения подают в период холостого хода якоря с периодом не более суммарного времени рабочего и холостого хода. Последующие импульсы также подают в период холостого хода якоря с периодом не более суммарного времени рабочего и холостого хода. На фиг. 1 изображена функциональная схема управления, на фиг. 2 графики тока обмотки и перемещения якоря. Реализация управления по предлагаемому способу может быть наиболее просто осуществлена по функциональной схеме фиг. 1, включающей следующие функциональные узлы: 1 - источник питания постоянного или переменного тока; 2 - блок формирования управляющих импульсов рабочего хода с устройством их управления; 3 - линейный электромагнитный двигатель, содержащий обмотку 4, якорь 5 и возвратную пружину 6. Работа функциональных узлов 2 и 3 синхронизирована по времени, т.е. время подачи напряжения на обмотку двигателя согласовано с движением якоря. Предлагаемая функциональная схема не исключает использования дополнительных узлов, например датчиков, для управления обмоткой по положению якоря. Кривые 7 и 8 на фиг.2 - зависимости перемещения якоря и тока обмотки от времени при движении якоря с начальной нулевой скоростью; кривые 9 и 10 - зависимости перемещения якоря и тока обмотки от времени при движении якоря с начальной отрицательной скоростью. Пример конкретного осуществления способа. В начальный момент времени при отключенном источнике питания 1 якорь 5 двигателя 3 под действием усилия возвратной пружины 6 занимает крайнее верхнее положение, которое соответствует начальному воздушному рабочему зазору в магнитной цепи двигателян и неподвижен (фиг.1). При включении источника питания 1 на блок формирования управляющих импульсов 2 поступает напряжение. В обмотке 4 под действием приложенного напряжения появляется ток, обуславливающий возникновение в рабочем зазоре н электромагнитной силы FЭМ. Одновременно с электромагнитной силой на якорь 5 действуют противоположно направленные силы трения и упругости пружины 6, благодаря чему в механической системе двигателя 3 сохраняется равновесие и якорь 5 остается неподвижным на время tmp1 (кривая 7). С нарастанием тока в обмотке 4 до значения imp1 (кривая 8) якорь 5 под действием электромагнитной силы начинает движение, преодолевая противодействие сил трения и упругости пружины. После втягивания якоря 5 в обмотку 4 за время tдв1 она обесточивается и якорь под действием упругих сил сжатой пружины начинает холостой ход в направлении, противоположном FЭМ. При возврате якоря в момент времени, соответствующий воздушному рабочему зазору вкл (кривая 9), который может отличаться от начального вкл/н на обмотку, с блока формирования управляющих импульсов 2 поступает напряжение, вызывающее протекание тока по обмотке и возникновение в рабочем воздушном зазоре вкл электромагнитного усилия FЭМ. Якорь 5, обладая некоторым запасом кинетической энергии, приобретенной под действием пружины, продолжает движение в направлении, противоположном усилию FЭМ, которое к этому моменту времени еще недостаточно велико для преодоления противодействующей силы за счет инерционности нарастания тока в обмотке двигателя. Движение якоря с отрицательной скоростью, увеличивающее рабочий воздушный зазор на интервале tmp2 обуславливает более интенсивное, чем в первом цикле, нарастание тока imp (кривая 10) за счет снижения индуктивности электромагнитной системы, а также за счет некоторого повышения питающего напряжения обмотки, наводимого движущимся против разворачивающегося магнитного поля ферромагнитным якорем ЭДС движения. При этом механическая энергия, запасенная пружиной во время рабочего хода якоря в предыдущем цикле, преобразуется частично в магнитную и передается в электрическую систему для использования в последующем цикле энергопреобразования. Через интервал времени tmp2 якорь под действием электромагнитной силы меняет свое направление движения на противоположное и ускоренно втягивается в обмотку за время tдв2, после чего протекание тока по обмотке прекращается. Якорь под действием упругих сил сжатой пружины совершает холостой ход. Далее цикл повторяется, а работа двигателя осуществляется в автоколебательном режиме. Работа двигателя, при которой смена знака скорости якоря на противоположный совпадает с координатой положения якоря в точке н, будет характеризоваться максимальной энергией удара. Регулируя момент подачи напряжения на обмотку двигателя, при возврате якоря, в пределах воздушного зазора 0 вкл/н можно регулировать энергию удара двигателя в широких пределах с высоким КПД. Сопоставление первого и последующих рабочих циклов (фиг. 2) показывает, что первый рабочий цикл характеризуется меньшим интервалом времени трогания tmp1mp2 и током трогания imp1mp2, большим интервалом времени движения якоря tдв1 > tдв2. Увеличение времени трогания tmp2 позволяет повысить ток трогания imp2 и среднее значение тока обмотки, тем самым снизить время движения якоря за счет его ускоренного перемещения под действием большей электромагнитной силы. Это позволяет повысить предударную скорость якоря, увеличить ударную энергию и КПД в сравнении с известными устройствами при одинаковых массогабаритных показателях, а следовательно, и удельную энергию удара.Формула изобретения
Способ управления однообмоточным линейным электромагнитным двигателем, включающий подачу импульса напряжения на обмотку двигателя в период холостого хода якоря и отключение его по завершении рабочего хода с периодом не более суммарного времени холостого и рабочего хода, отличающийся тем, что импульс напряжения подают в момент времени, соответствующий такому воздушному рабочему зазорувкл, чтобы смена знака скорости якоря на противоположный происходила в точке с координатой положения якоря, равной начальному воздушному рабочему зазору н, причем вклн.РИСУНКИ
Рисунок 1, Рисунок 2www.findpatent.ru
Изобретение относится к электротехнике, к электромагнитным двигателям и может быть использовано для создания машин с дискретным поступательным движением рабочего органа любой необходимой длины. Технический результат заключается в обеспечении реверсирования рабочего органа. Линейный электромагнитный двигатель содержит осевой канал, в который помещен рабочий орган (9) в виде гладкой штанги или троса, содержит цилиндрические статор (1), возвратную пружину (8), первую крышку (2), первую обмотку (3), первый втягивающе-притягивающийся якорь (5) с плоской дисковой частью (7). Двигатель оснащен механизмом заклинивания рабочего органа при втягивании якоря и двуплечим рычагом (13) для расклинивания при возврате якоря пружиной. Статор разделен внутри поперечно полюсом-шайбой (19) на две одинаковые части и содержит одинаковые с первыми вторую крышку (2), вторую обмотку (4) и второй якорь (6), срабатывающий попеременно с первым якорем. Перемещение каждого якоря ограничено при втягивании в обмотку - полюсом-шайбой при возврате пружиной-крышками. Концы проходящей через полюс-шайбу возвратной пружины заходят в цилиндрические проточки на торцах якорей. На внешней поверхности статора предусмотрен кольцевой прямоугольный паз, выполненный коаксиально и симметрично относительно внутреннего полюса-шайбы. 1 ил.
Изобретение относится к электротехнике, в частности к электромагнитным двигателям, и может быть использовано для создания машин с дискретным поступательным движением рабочего органа любой необходимой длины.
Известен электромагнитный линейный двигатель (ЛЭМД) для дискретного перемещения рабочего органа, содержащий корпус со стопорными элементами, внутри которого помещен электромагнит (А.С. СССР №1483563, МПК Н02K 41/03, опубл. 30.05.89, бюл. №20).
Однако в таком электродвигателе корпус самого электромагнита совершает дискретное перемещение и является рабочим органом, что ограничивает область его применения.
Известны линейные шаговые электродвигатели, осуществляющие поступательное перемещение рабочего органа под действием электромагнитных сил, создаваемых поочередно несколькими обмотками (А.С. СССР №985893, МПК Н02K 41/03, опубл. 30.12.82, бюл. №48; А.С. СССР №1363395, МПК Н02K 41/03, опубл. 30.12.87, бюл. №48).
Недостатками таких электродвигателей является их конструктивная сложность, повышающая требования к условиям изготовления и ограничивающая использование в качестве силового привода, а наличие нескольких обмоток предполагает использование специальных импульсных электрических преобразователей.
Известен линейный шаговый электромагнитный двигатель, содержащий статор, обмотку, комбинированный якорь, выполненный в форме цилиндра с дисковой частью, возвратную пружину и направляющий корпус. Один торец якоря имеет цилиндрическую проточку для размещения возвратной пружины, другой торец оснащен стопорными элементами - собачками - в виде плоских, подпружиненных, радиально подвижных секторов. Роль направляющих стержней и рабочего органа двигателя выполняет помещенная в сквозной осевой канал якоря и дискретно перемещаемая им на каждом его рабочем ходе с помощью собачек однонаправленная зубчатая штанга, фиксируемая от обратного движения при возврате якоря пружиной собачками на статоре двигателя (Патент на полезную модель RU №59343, МПК Н02K 41/03, опубл. 10.12.2006, бюл. №34).
Однако данный электромагнитный двигатель не позволяет реверсировать рабочий орган, что сужает функциональные возможности.
Наиболее близким к предлагаемому решению является линейный шаговый электромагнитный двигатель, содержащий направляющий корпус, в котором размещены статор, обмотка и комбинированный якорь. Якорь включает цилиндрическую и дисковую части, рабочий орган, расположенный в осевом канале якоря и снабженный стопорными элементами с механизмом размыкания и возвратной пружиной. Рабочий орган выполнен в виде гладкой, гибкой штанги или троса, стопорные элементы выполнены в виде конусных элементов, подпружиненных встречно рабочему ходу якоря и помещенных внутрь конусной проточки, выполненной в дисковой части якоря, и выступающих над дисковой частью. Механизм размыкания представляет собой двуплечий поворотный рычаг, размещенный на дисковой части якоря, выполненный с возможностью обеспечения упора одним плечом в торец статора, а другим - в стопорные элементы для обеспечения их размыкания при остановке втянувшегося якоря (Патент на изобретение RU №2366065, МПК Н02K 41/03, опубл. 27.08.2009, бюл №24).
Недостатком прототипа является обеспечение исключительно однонаправленного перемещения рабочего органа.
Цель изобретения - расширение эксплуатационных возможностей и областей применения устройства.
Технический результат заключается в обеспечении реверсирования рабочего органа.
Заявленный технический результат достигается тем, что линейный электромагнитный двигатель с осевым каналом, в который помещен рабочий орган в виде гладкой штанги или троса, содержащий цилиндрические статор, возвратную пружину, первую крышку, первую обмотку, первый втягивающе-притягивающийся якорь с плоской дисковой частью, оснащенной механизмом заклинивания рабочего органа при втягивании якоря и двуплечим рычагом для расклинивания при возврате якоря пружиной, согласно решению статор разделен внутри поперечно полюсом-шайбой на две одинаковые части и содержит одинаковые с первыми вторую крышку, вторую обмотку и второй якорь, срабатывающий попеременно с первым якорем, перемещение δ каждого якоря ограничено при втягивании в обмотку - полюсом-шайбой, при возврате пружиной - крышками, концы проходящей через полюс-шайбу возвратной пружины заходят в цилиндрические проточки на торцах якорей, а на внешней поверхности статора предусмотрен кольцевой прямоугольный паз, выполненный коаксиально и симметрично относительно внутреннего полюса-шайбы.
На чертеже показана конструкция предлагаемого реверсивного линейного шагового электромагнитного двигателя.
Устройство содержит корпус-статор 1, полюс-шайбу 19, крышки 2, обмотки 3, 4, два комбинированных якоря 5, 6 с плоскими дисковыми частями 7, цилиндрическую спиральную пружину сжатия 8 (возвратную пружину), проходящую через полюс-шайбу и помещенную концами в цилиндрические проточки якорей 5 и 6. Рабочий орган 9 пропущен в осевой канал двигателя через отверстия в крышках 2. Силовое сочленение рабочего органа 9 с каждым якорем 5 или 6 на рабочем ходе обеспечивается механизмом заклинивания - подпружиненными заклинивающими конусными кулачками 10 и 11, размыкание которых производится рычагом 12 для якоря 6 или 13 для якоря 5. Соосность якорей и статора задается направляющими 14. Регулировочные болты 15 обеспечивают частичное расклинивание рабочего органа 9, когда обмотки 3 и 4 обесточены.
Устройство работает следующим образом.
При обесточенных обмотках 3, 4 оба якоря 5 и 6 поджаты к регулировочным болтам 15 пружиной 8. При необходимости перемещения рабочего органа 9, например, в направлении А, на обмотку 4 подают напряжение от источника питания. Якорь 6 втягивается в обмотку 4 под действием электромагнитной силы, перемещаясь на величину δ (рабочий ход) и сжимая пружину 8. Незначительные взаимные осевые перемещения заклинивающих элементов 10 и якоря 6, контактирующих по конусной поверхности, создают значительные радиальные усилия, надежно зажимающие рабочий орган 9, вследствие чего совершающий рабочий ход якорь 6 перемещает рабочий орган 9 в направлении Б на величину, близкую к d. Втянувшийся в обмотку 4 якорь 6 упирает внешнее плечо 16 рычага 12 в торцевую поверхность статора 1, смещает в осевом направлении заклинивающие элементы 10 и обеспечивает размыкание рабочего органа 9 и якоря 6. Протекающий по обмотке 4 ток удерживает якорь 6 в притянутом к полюсу-шайбе 19 положении.
Затем в обмотку 3 подают электрический импульс, который вызывает втягивание якоря 5 в обмотку 3. При этом заклинивающие элементы 11 надежно фиксируют рабочий орган 9 и перемещают его на величину, близкую к d, в направлении А.
Окончание питающего импульса соответствует моменту соприкосновения внешнего плеча 17 рычага 13 с торцевой поверхностью статора 1, расклинивание кулачков 11 и размыкания рабочего органа 9 и якоря 5. Якорь 5 при помощи усилия от сжатой пружины 8 возвращается в исходное положение, и цикл повторяется. При этом якорь 6 остается втянутым в обмотку 4 до окончания технологической операции.
Для реверсирования рабочего органа 9 аналогичным образом подают напряжение на обмотку 3, а якорь 6 под действием электрических импульсов в обмотке 4 совершает возвратно-поступательные движения, дискретно перемещая рабочий орган 9 в направлении Б.
Линейный электромагнитный двигатель с осевым каналом, в который помещен рабочий орган в виде гладкой штанги или троса, содержащий цилиндрические статор, возвратную пружину, первую крышку, первую обмотку, первый втягивающе-притягивающийся якорь с плоской дисковой частью, оснащенной механизмом заклинивания рабочего органа при втягивании якоря и двуплечим рычагом для расклинивания при возврате якоря пружиной, отличающийся тем, что статор разделен внутри поперечно полюсом-шайбой на две одинаковые части и содержит одинаковые с первыми вторую крышку, вторую обмотку и второй якорь, срабатывающий попеременно с первым якорем, перемещение δ каждого якоря ограничено при втягивании в обмотку - полюсом-шайбой, при возврате пружиной - крышками, концы проходящей через полюс-шайбу возвратной пружины заходят в цилиндрические проточки на торцах якорей, а на внешней поверхности статора предусмотрен кольцевой прямоугольный паз, выполненный коаксиально и симметрично относительно внутреннего полюса-шайбы.
www.findpatent.ru