





Использование: в качестве электропривода поступательного или вращательного движения. Электродинамический двигатель неуравновешенной электродинамической подсистемы поступательного или вращательного движения содержит обмотку (катушку индуктивности), соединенную параллельно с ней емкостью. Причем колебательный контур, образованный индуктивностью и емкостью, находится в резонансе токов. Обмотка двигателя намотана на пластины, которые имеют для этого выступы и отверстия для пропускания проводов обмотки с одной пластины до другой. Кроме того, электродинамический двигатель состоит из равных по мощности половин, которые поворачиваются на валах на 90 и 180°, установленных на поворотном устройстве с осью вращения. Поступательное движение происходит, когда векторы сил обоих двигателей направлены в одну сторону, а вращательное, когда векторы сил направлены в разные стороны. Технический результат заключается в доведении до практического применения. 3 з.п. ф-лы, 11 ил.
Изобретение относится к электротехнике и может быть использовано в качестве электропривода вращательного или поступательного движения.
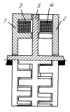
Известен электродинамический двигатель (а.с. СССР n 469194, М. кл.3 H 02 K 1/02), якорь которого совершает возвратно-поступательные движения. При движении якоря в одну сторону статор, если он не закреплен, движется в противоположную и силы взаимно уравновешиваются. Недостатком этого устройства является взаимное уравновешивание сил статора и ротора. Наиболее близкими к изобретению является устройства, работающие на принципе неуравновешенных электродинамических подсистем, описанные в книге Сигалов Р. Г. и другие. Новые исследования движущих сил магнитного поля. Ташкент, "Фан", 1975, с. 65-67, рис. 13, 72-74, 18, 20-23. Недостатком описанных устройств является то, что дано только теоретическое обоснование устройств и опытные исследования схем. Целью изобретения является доведение указанных устройств до их практического применения. Поставленная цель достигается тем, что в электродинамическом двигателе, основанном на использовании неуравновешенных электродинамических подсистем, содержащий обмотку, выполненную в виде секций, уложенных на выступы пластин, из которых собран якорь, параллельно обмотка включена емкость, образуя колебательный контур, находящийся в резонансе токов, двигатель разделен на две равные половины, объединенные в одном корпусе, установленные на валах поворотного устройства с осью вращения, способных поворачивать их в обе стороны на 180o или на 90o относительно нулевого положения, когда векторы сил обоих половин направлены по одной прямой в противоположные стороны так, что когда векторы сил обоих половин направлены в одну сторону, происходит поступательное перемещение, а когда в разные стороны - вращательное движение. Причем к одному источнику питания может быть подключено n электродинамических двигателей. Обмотка двигателя может охлаждаться низкотемпературными жидкостями, например жидким азотом. Обмотка двигателя, провода, соединяющие обмотку с емкостью и обкладки конденсаторов емкости могут быть выполнены из сверхпроводящих материалов, которые охлаждены до критических температур и находятся в сверхпроводящем состоянии. Сущность предлагаемого электродинамического двигателя неуравновешенной электродинамической подсистемы представлена на фиг. 1-11. На фиг. 1 представлена схема включения обмотки с индуктивностью L электродинамического двигателя с емкостью C, причем образованный при этом колебательный контур находится в резонансе токов. На фиг. 2-5 изображен электродинамический двигатель поступательного движения. На фиг. 1 представлено несколько витков 1 обмотки двигателя. Витки наматываются на выступы 2 (фиг. 3) пластины 3 якоря и провода одной секции, пропускаются через отверстия 4 к другой секции. Отверстия 5 служат для болтов, скрепляющих пластины 3 в пакет, изображенный на фиг. 4, который образует якорь двигателя. Если провода не изолированы, то изолируются выступы 2 пластины 3 и вставляются изолирующие втулки в отверстия 4. На фиг. 3 не показаны. На фиг. 5 представлен электродинамический двигатель поступательного движения в сборе. Якорь 6 двигателя соединен с корпусом 7 при помощи болтов 9. Подача электрического тока на обмотку двигателя осуществляется с помощью щеточных токосъемников 10. Емкость соединена с обмоткой при помощи проводов 8. На фиг. 6-9 представлен электродинамический двигатель вращательного движения. На фиг. 8 показан ротор двигателя в сборе. Пластины 1, фланцы 11 и 12, которые соединены с валами вращения 13 и 14, собраны в пакет и стянуты болтами 15, образуя при этом якорь двигателя. На фиг. 9 представлен электродинамический двигатель в сборе. Якорь 16 двигателя вращается на валах 13 и 14. Корпус 7 двигателя с торцов закрыт подшипниковыми щитами 17 с помощью болтов 18. Электрический ток подается на двигатель по проводам 19 на щетки 20, которые прикреплены к неподвижному держателю 21. Щетки 20 лежат на токосъемных кольцах 22. С токосъемных колец 22 ток по проводам 19 подается на обмотку двигателя. Емкость соединена с обмоткой с помощью проводов 8. На фиг. 10 и 11 представлены электродинамические двигатели поступательного и вращательного движения. На фиг. 10 представлен электродинамический двигатель поступательного движения. Двигатель состоит из двух равных половин 24, 25. половины 24 и 25 установлены на валах поворота 13 и 14, которые способны поворачивать половины 24 и 25 на 180o или на 90o относительно нулевого положения. Механизм поворота расположен в корпусе 7 и на фиг. 10 не показан. На фиг. 11 представлен электродинамический двигатель вращательного движения. Двигатель состоит из двух равных половин 24, 25. Половины 24 и 25 установлены на валах 13 и 14 поворотного устройства. С их помощью половины 24 и 25 могут поворачиваться на 180o или на 90o в обе стороны от нулевого положения. Поворотное устройство смонтировано в корпусе 7 двигателя вращательного движения. На фиг. 11 оно не показано. Двигатель вращается на валу 23. Электродинамический двигатель неуравновешенной электродинамической подсистемы работает следующим образом. При включении тока в колебательном контуре, образованном обмоткой с индуктивностью L и включенной параллельно ей емкостью C, электродинамического двигателя возникают электромагнитные колебания с резонансной частотой, определяемой по формуле
 а индуктивный IL = Uвx/(
а индуктивный IL = Uвx/( L). Индуктивный и емкостный токи противоположны по фазе и равны по амплитуде, а по отношению к источнику тока они взаимно компенсируются. Реактивный ток замыкается в кольцо, образуемое индуктивностью и емкостью, а провода, соединяющие колебательный контур с источником энергии, и самый источник энергии полностью разгружаются от реактивного тока. Поэтому к одному источнику тока можно подключить n-е количество электродинамических двигателей, колебательный контур которых находится в резонансе токов. В самой обмотке электродинамического двигателя при резонансе токов возникает ток, определяемый по формуле. При соответствующем подборе входного напряжения Uвх, частоты и индуктивности обмотки двигателя реактивный ток может достигать сотен тысяч ампер. Электрический ток такой силы, проходя по обмотке электродинамического двигателя неуравновешенной электродинамической подсистемы, создает в витках обмотки (катушки) силу, равную сотням и даже тысячам килограмм на один виток. Под действием такой силы якорь начинает двигаться, а ротор вращаться. Управление скоростью движения электродинамического двигателя осуществляется с помощью изменения входного напряжения, а также отключением части витков катушки или части конденсаторов емкости. В последнем случае колебательный контур выходит из резонанса токов, ток в обмотке двигателя уменьшается - уменьшается и электродвижущая сила в обмотке якоря (ротора) электродинамического двигателя. Электродинамический двигатель поступательного или вращательного движения состоит из двух объединенных в одном корпусе равных половин. Электродинамические двигатели поступательного движения соединены с поворотным устройством, способным поворачивать эти двигатели на 180o вокруг оси или на 90o в обе стороны от нулевого положения. Нулевым положением является положение, при котором векторы сил обоих половин направлены в противоположные стороны по прямой линии, т.е. между их направлением 180o. При этом результирующая сила равна нулю. Двигатель поступательного движения начинает двигаться при повороте обоих половин в одну сторону. Сила, с которой будет двигаться двигатель зависит от угла поворота обоих половин. Максимальную силу двигатель получает, когда направления векторов сил обоих половин параллельны друг другу. В этом случае результирующая сила равна сумме сил обоих половин. При повороте половин в противоположную сторону направление движения изменяется на 180o. Двигатель вращательного движения имеет ось вращения. Он начинает вращаться, когда векторы сил половин направлены в разные стороны. Охлаждение электродинамического двигателя может осуществляться через корпус, также принудительно путем пропускания охлажденного газа через якорь двигателя. Кроме того, можно охлаждать двигатель криогенными жидкостями, например жидким азотом. При выполнении проводов обмотки двигателя, соединительных проводов и обкладок конденсатора из сверхпроводящего материала и охлаждении их до критических температур проводники переходят в сверхпроводящее состояние. В этом случае образуется практически идеальный колебательный контур, в котором электромагнитные колебания будут мало затухать. Питание двигателей осуществляется переменным током, а также постоянным, преобразуя его в переменной стабилизированной частоты. Последняя схема питания двигателей предпочтительна, т. к. нестабильность частоты внешнего источника не будет влиять на работу двигателя.
L). Индуктивный и емкостный токи противоположны по фазе и равны по амплитуде, а по отношению к источнику тока они взаимно компенсируются. Реактивный ток замыкается в кольцо, образуемое индуктивностью и емкостью, а провода, соединяющие колебательный контур с источником энергии, и самый источник энергии полностью разгружаются от реактивного тока. Поэтому к одному источнику тока можно подключить n-е количество электродинамических двигателей, колебательный контур которых находится в резонансе токов. В самой обмотке электродинамического двигателя при резонансе токов возникает ток, определяемый по формуле. При соответствующем подборе входного напряжения Uвх, частоты и индуктивности обмотки двигателя реактивный ток может достигать сотен тысяч ампер. Электрический ток такой силы, проходя по обмотке электродинамического двигателя неуравновешенной электродинамической подсистемы, создает в витках обмотки (катушки) силу, равную сотням и даже тысячам килограмм на один виток. Под действием такой силы якорь начинает двигаться, а ротор вращаться. Управление скоростью движения электродинамического двигателя осуществляется с помощью изменения входного напряжения, а также отключением части витков катушки или части конденсаторов емкости. В последнем случае колебательный контур выходит из резонанса токов, ток в обмотке двигателя уменьшается - уменьшается и электродвижущая сила в обмотке якоря (ротора) электродинамического двигателя. Электродинамический двигатель поступательного или вращательного движения состоит из двух объединенных в одном корпусе равных половин. Электродинамические двигатели поступательного движения соединены с поворотным устройством, способным поворачивать эти двигатели на 180o вокруг оси или на 90o в обе стороны от нулевого положения. Нулевым положением является положение, при котором векторы сил обоих половин направлены в противоположные стороны по прямой линии, т.е. между их направлением 180o. При этом результирующая сила равна нулю. Двигатель поступательного движения начинает двигаться при повороте обоих половин в одну сторону. Сила, с которой будет двигаться двигатель зависит от угла поворота обоих половин. Максимальную силу двигатель получает, когда направления векторов сил обоих половин параллельны друг другу. В этом случае результирующая сила равна сумме сил обоих половин. При повороте половин в противоположную сторону направление движения изменяется на 180o. Двигатель вращательного движения имеет ось вращения. Он начинает вращаться, когда векторы сил половин направлены в разные стороны. Охлаждение электродинамического двигателя может осуществляться через корпус, также принудительно путем пропускания охлажденного газа через якорь двигателя. Кроме того, можно охлаждать двигатель криогенными жидкостями, например жидким азотом. При выполнении проводов обмотки двигателя, соединительных проводов и обкладок конденсатора из сверхпроводящего материала и охлаждении их до критических температур проводники переходят в сверхпроводящее состояние. В этом случае образуется практически идеальный колебательный контур, в котором электромагнитные колебания будут мало затухать. Питание двигателей осуществляется переменным током, а также постоянным, преобразуя его в переменной стабилизированной частоты. Последняя схема питания двигателей предпочтительна, т. к. нестабильность частоты внешнего источника не будет влиять на работу двигателя.www.findpatent.ru

 а индуктивный IL = Uвx/(
а индуктивный IL = Uвx/( L). Индуктивный и емкостный токи противоположны по фазе и равны по амплитуде, а по отношению к источнику тока они взаимно компенсируются. Реактивный ток замыкается в кольцо, образуемое индуктивностью и емкостью, а провода, соединяющие колебательный контур с источником энергии, и самый источник энергии полностью разгружаются от реактивного тока. Поэтому к одному источнику тока можно подключить n-е количество электродинамических двигателей, колебательный контур которых находится в резонансе токов. В самой обмотке электродинамического двигателя при резонансе токов возникает ток, определяемый по формуле. При соответствующем подборе входного напряжения Uвх, частоты и индуктивности обмотки двигателя реактивный ток может достигать сотен тысяч ампер. Электрический ток такой силы, проходя по обмотке электродинамического двигателя неуравновешенной электродинамической подсистемы, создает в витках обмотки (катушки) силу, равную сотням и даже тысячам килограмм на один виток. Под действием такой силы якорь начинает двигаться, а ротор вращаться. Управление скоростью движения электродинамического двигателя осуществляется с помощью изменения входного напряжения, а также отключением части витков катушки или части конденсаторов емкости. В последнем случае колебательный контур выходит из резонанса токов, ток в обмотке двигателя уменьшается - уменьшается и электродвижущая сила в обмотке якоря (ротора) электродинамического двигателя. Электродинамический двигатель поступательного или вращательного движения состоит из двух объединенных в одном корпусе равных половин. Электродинамические двигатели поступательного движения соединены с поворотным устройством, способным поворачивать эти двигатели на 180o вокруг оси или на 90o в обе стороны от нулевого положения. Нулевым положением является положение, при котором векторы сил обоих половин направлены в противоположные стороны по прямой линии, т.е. между их направлением 180o. При этом результирующая сила равна нулю. Двигатель поступательного движения начинает двигаться при повороте обоих половин в одну сторону. Сила, с которой будет двигаться двигатель зависит от угла поворота обоих половин. Максимальную силу двигатель получает, когда направления векторов сил обоих половин параллельны друг другу. В этом случае результирующая сила равна сумме сил обоих половин. При повороте половин в противоположную сторону направление движения изменяется на 180o. Двигатель вращательного движения имеет ось вращения. Он начинает вращаться, когда векторы сил половин направлены в разные стороны. Охлаждение электродинамического двигателя может осуществляться через корпус, также принудительно путем пропускания охлажденного газа через якорь двигателя. Кроме того, можно охлаждать двигатель криогенными жидкостями, например жидким азотом. При выполнении проводов обмотки двигателя, соединительных проводов и обкладок конденсатора из сверхпроводящего материала и охлаждении их до критических температур проводники переходят в сверхпроводящее состояние. В этом случае образуется практически идеальный колебательный контур, в котором электромагнитные колебания будут мало затухать. Питание двигателей осуществляется переменным током, а также постоянным, преобразуя его в переменной стабилизированной частоты. Последняя схема питания двигателей предпочтительна, т. к. нестабильность частоты внешнего источника не будет влиять на работу двигателя.
L). Индуктивный и емкостный токи противоположны по фазе и равны по амплитуде, а по отношению к источнику тока они взаимно компенсируются. Реактивный ток замыкается в кольцо, образуемое индуктивностью и емкостью, а провода, соединяющие колебательный контур с источником энергии, и самый источник энергии полностью разгружаются от реактивного тока. Поэтому к одному источнику тока можно подключить n-е количество электродинамических двигателей, колебательный контур которых находится в резонансе токов. В самой обмотке электродинамического двигателя при резонансе токов возникает ток, определяемый по формуле. При соответствующем подборе входного напряжения Uвх, частоты и индуктивности обмотки двигателя реактивный ток может достигать сотен тысяч ампер. Электрический ток такой силы, проходя по обмотке электродинамического двигателя неуравновешенной электродинамической подсистемы, создает в витках обмотки (катушки) силу, равную сотням и даже тысячам килограмм на один виток. Под действием такой силы якорь начинает двигаться, а ротор вращаться. Управление скоростью движения электродинамического двигателя осуществляется с помощью изменения входного напряжения, а также отключением части витков катушки или части конденсаторов емкости. В последнем случае колебательный контур выходит из резонанса токов, ток в обмотке двигателя уменьшается - уменьшается и электродвижущая сила в обмотке якоря (ротора) электродинамического двигателя. Электродинамический двигатель поступательного или вращательного движения состоит из двух объединенных в одном корпусе равных половин. Электродинамические двигатели поступательного движения соединены с поворотным устройством, способным поворачивать эти двигатели на 180o вокруг оси или на 90o в обе стороны от нулевого положения. Нулевым положением является положение, при котором векторы сил обоих половин направлены в противоположные стороны по прямой линии, т.е. между их направлением 180o. При этом результирующая сила равна нулю. Двигатель поступательного движения начинает двигаться при повороте обоих половин в одну сторону. Сила, с которой будет двигаться двигатель зависит от угла поворота обоих половин. Максимальную силу двигатель получает, когда направления векторов сил обоих половин параллельны друг другу. В этом случае результирующая сила равна сумме сил обоих половин. При повороте половин в противоположную сторону направление движения изменяется на 180o. Двигатель вращательного движения имеет ось вращения. Он начинает вращаться, когда векторы сил половин направлены в разные стороны. Охлаждение электродинамического двигателя может осуществляться через корпус, также принудительно путем пропускания охлажденного газа через якорь двигателя. Кроме того, можно охлаждать двигатель криогенными жидкостями, например жидким азотом. При выполнении проводов обмотки двигателя, соединительных проводов и обкладок конденсатора из сверхпроводящего материала и охлаждении их до критических температур проводники переходят в сверхпроводящее состояние. В этом случае образуется практически идеальный колебательный контур, в котором электромагнитные колебания будут мало затухать. Питание двигателей осуществляется переменным током, а также постоянным, преобразуя его в переменной стабилизированной частоты. Последняя схема питания двигателей предпочтительна, т. к. нестабильность частоты внешнего источника не будет влиять на работу двигателя. www.freepatent.ru
Изобретение относится к аэрокосмической технике и может быть использовано в качестве двигателя и источника электроэнергии для аэрокосмических транспортных средств и аппаратов.
Известны плазменно-ионные двигатели [патент ФРГ №682150 «Ионный двигатель»], [патент RU №2024785 «Электрореактивная двигательная установка»], содержащие ионизаторы рабочего тела, формирователи плазмы, ускорители заряженных частиц, поток которых создает реактивную тягу, движущую транспортное средство. Двигатели такого типа имеют существенные недостатки. Им требуются источники электроэнергии соответствующей мощности и соответствующие запасы топлива, т.к. они расходуют электроэнергию на ионизацию рабочего тела, получение плазмы, ускорение заряженных частиц, кроме того, они расходуют рабочее тело, запасы которого на борту весьма ограничены. Все это снижает КПД, коэффициент полезной нагрузки, ограничивает радиус действия транспортного средства и время жизни аэрокосмического аппарата.
Прототипом предлагаемого двигателя является двигатель [патент RU №2397363 «Плазменно-ионный комбинированный воздушно-реактивный двигатель»], содержащий генератор электрической энергии, использующий энергию ядерных реакций, инициируемых нейтронным излучением, ионизирующие камеры рабочей среды внешней и запасенной, ускоритель заряженных частиц, создающих реактивную тягу двигателя, и взаимозамещаемые диффузор-конфузор для изменения направления тяги.
Недостатками прототипа являются ограниченное время работы и радиус действия аэрокосмического аппарата, вызванное расходованием запасенной рабочей среды и ядерного топлива, запасы которых на борту весьма ограничены, а также радиационная опасность ядерных реакций и нейтронного излучения, негативно воздействующих на персонал и окружающую среду.
Задачей предлагаемого плазменно-реактивного электродинамического двигателя является увеличение срока работы и радиуса действия аэрокосмического аппарата, а также устранение радиационной опасности, свойственной прототипу.
Данная задача решается за счет того, что в заявленном плазменно-реактивном электродинамическом двигателе рабочую среду ионизируют электродуговым плазмотроном, содержащим анод и катод. Двигатель также содержит управляющие и ускоряющие электроды электрического поля, скрещенного с полем электрической дуги плазмотрона, электронные мембраны, поляризующиеся электроды, резонансные цепи последовательно соединенных конденсаторов, распределители напряжения, магнитопровод, на котором выполнены обмотки - первичная со средней точкой, соединенной с массой двигателя, обмотка катионного напряжения, обмотка дуги и токовая обмотка, а в зазоре магнитопровода установлен якорь, жестко соединенный с корпусом аппарата, трехпозиционный переключатель, бортовой источник электроэнергии, преобразователь напряжения электрической дуги, ускоритель заряженных частиц, состоящий из преобразователя катионного напряжения и электродов ускорителя заряженных частиц, диафрагмы, блок управления диафрагмами, взамозамещаемые диффузор (конфузор) и бортовой компьютер с электронной программой управления двигателем, при этом катод электродугового плазмотрона соединен со средней точкой первичной обмотки и с массой двигателя, а анод подключен к плюсовой клемме преобразователя напряжения электрической дуги, управляющие и ускоряющие электроды скрещенного электрического поля через распределители напряжения подключены к резонансным цепям последовательно соединенных конденсаторов, настроенным на резонанс токов на рабочей частоте с симметричными плечами первичной обмотки, концы которой соединены с поляризующимися электродами, обмотка катионного напряжения соединена с преобразователем катионного напряжения, плюсовая клемма которого соединена с массой, а минусовая клемма подключена к электродам ускорителя катионов рабочей среды, обмотка электрической дуги подключена к бортовому источнику электроэнергии и к преобразователю напряжения для электрической дуги, минусовая клемма которого соединена с массой двигателя, токовая обмотка через трехпозиционный переключатель соединена с якорем, а соответствующие управляющие выходы бортового компьютера соединены с входом управления трехпозиционного переключателя, бортового источника электроэнергии, преобразователя напряжения электрической дуги, преобразователя катионного напряжения, распределителя напряжения и блока управления диафрагмами.
Схема предлагаемого двигателя представлена на чертеже.
Плазменно-реактивный электродинамический двигатель содержит электродуговой плазмотрон 1 с анодом и катодом, управляющие электроды 2 и ускоряющие электроды 4 скрещенного электрического поля с полем электрической дуги плазмотрона, электронные мембраны 3, поляризующиеся электроды 5, соединенные с концами 6 первичной обмотки 11, имеющую среднюю точку 8 и соединенные с резонансными цепями конденсаторов 7, подключенными другими концами к средней точке 8, соединенной с массой двигателя 9, а резонансные конденсаторы 7 через распределители напряжения 10 соединены с управляющими 2 и ускоряющими электродами 4 скрещенного электрического поля. Электродинамический двигатель содержит магнитопровод 12, на котором выполнена первичная обмотка 11, обмотка катионного напряжения 13, обмотка электрической дуги 14 и токовая обмотка 15, соединенная через трехпозиционный переключатель 16 «вперед - назад - нейтраль» с якорем 17, который расположен в зазоре магнитопровода 12 и жестко скреплен с корпусом аэрокосмического аппарата 18, бортовой источник электроэнергии 19, преобразователь напряжения 20 для электрической дуги, у которого минусовая клемма соединена с массой двигателя 9, плюсовая клемма преобразователя напряжения 20 соединена с анодом плазмотрона 1, а катод плазмотрона соединен со средней точкой 8 и с массой двигателя 9. Двигатель также содержит ускоритель заряженных частиц, состоящий из преобразователя катионного напряжения 21 и электродов ускорителя катионов 22, преобразователь катионного напряжения 21 соединен минусовой клеммой с электродами 22, а его плюсовая клемма соединена с массой двигателя 9, взаимозамещаемые конфузор (диффузор) 23 (24) диафрагмы 25, блок управления диафрагмами 26 и бортовой компьютер 27, управляющий работой двигателя по заданной электронной программе, а соответствующие управляющие выходы бортового компьютера 27 соединены с входом управления распределителя напряжения 10, трехпозиционного переключателя 16, бортового источника электроэнергии 19, преобразователя напряжения электрической дуги 20, преобразователя катионного напряжения 21 и блока управления диафрагмами 26.
Работает плазменно-реактивный электродинамический двигатель следующим образом. От бортового источника электроэнергии 19 подают напряжение на обмотку 14 электрической дуги и через преобразователь напряжения 20 электрической дуги - на электродуговой плазмотрон 1, ионизирующий рабочую среду. Колебания рабочей частоты в обмотке 14 индуцируются в первичной обмотке 11, настроенной в резонанс на рабочую частоту с резонансными цепями конденсаторов 7, с которых через распределители напряжения 10 подают симметричные относительно средней точки 8 противофазные напряжения на управляющие 2 и ускоряющие 4 электроды скрещенного электрического поля с полем электрической дуги плазматрона 1. В плазмотроне поджигают электрическую дугу, которая ионизирует рабочую среду - воздух, поступающий в плазмотрон, через открытую диафрагму 25 взаимозамещаемых диффузора 23 (конфузора 24). Под действием положительной полуволны напряжения на управляющем 2 и ускоряющем 4 электроде, электроны из плазмотрона 1 устремляются к управляющему электроду 2, получая потенциал управляющего электрического поля, проходят через электронную мембрану 3, которая пропускает сквозь себя электроны и не пропускает катионы, атомы и молекулы рабочей среды, ускоряются электрическим полем ускоряющего электрода 4, образуя пучок электронной плазмы, который отдает свою энергию поляризующемуся электроду 5, заряжая его отрицательно, а катод плазмотрона 1 соединенный со средней точкой 8 первичной обмотки 11, заряжается катионами ионизируемой рабочей среды положительно. Под действием разности потенциалов между катодом плазмотрона 1 и поляризующимся электродом 5 идет импульс электронного тока по одной половине первичной обмотки 11, создавая соответствующий магнитный поток в магнитопроводе 12, а электроны, приходящие на катод плазмотрона 1, рекомбинируют с катионами рабочей среды, превращая их в атомы и молекулы рабочей среды, которая вновь подвергается ионизации в электродуговом плазмотроне. При смене полярности полуволны напряжения на управляющем электроде 2 и ускоряющем электроде 4 импульс тока идет по другому плечу первичной обмотки 11, создавая в магнитопроводе 12 магнитный поток противоположного направления и рекомбинируя катионы в атомы и молекулы рабочей среды, вновь подвергаемой ионизации. Переменный магнитный поток в магнитопроводе 12 индуцирует соответствующие ЭДС в обмотках 13, 14, 15. ЭДС обмотки катионного напряжения 13, соединенной с преобразователем катионного напряжения 21, преобразуется в рабочее напряжение и подается с минусовой клемы преобразователя 21 на электроды 22 ускорителя заряженных частиц (катионов рабочей среды), под действием которого катионы разгоняются до скоростей 105-106 м/с и вылетают наружу сквозь конфузор 24, создавая реактивную тягу, движущую аппарат в атмосфере планеты. По мере разряжения атмосферы за бортом порядка 10-3 кг/см2, рабочее напряжение на электродах 22 отключают, диафрагмы 25 диффузора и конфузора герметично закрывают, двигатель создает электродинамическую тягу, не расходуя запасенную рабочую среду. ЭДС обмотки электрической дуги 14 подают в бортовой источник электроэнергии 19 для питания бортовой сети и аккумулированная электроэнергия на случай повторных запусков двигателя, а также через преобразователь напряжения 20 для электрической дуги, с его плюсовой клеммы, подают рабочее напряжения на анод электродугового плазмотрона 1, ионизирующего рабочую среду. ЭДС токовой обмотки 15 через трехпозиционный переключатель 16 подают на якорь 17, жестко скрепленный с корпусом 18 аэрокосмического аппарата и установленный в зазоре магнитопровода 12. В результате взаимодействия магнитного потока с электрическим током в якоре создается сила тяги, движущая аппарат в направлении вектора импульса силы, которое задается направлением вектора силы тока в якоре с помощью трехпозиционного переключателя 16. При торможении двигателем переключатель 16 устанавливают в положение «назад» и подают напряжение на электроды 22 со стороны конфузора 24. Вектор реактивной тяги и вектор электродинамической тяги будут направлены в противоположную сторону движения «вперед», аппарат будет тормозиться, снижая скорость. Снизив скорость до нуля, может начать движение в противоположном направлении. Работой двигателя управляет бортовой компьютер 27 по заданной электронной программе, путем подачи соответствующих команд на управляющие входы распределителя напряжения 10, трехпозиционного переключателя 16, бортового источника электроэнергии 19, преобразователя напряжения 20 электрической дуги, преобразователя катионного напряжения 21 и блока управления диафрагмами 26.
В предлагаемом плазменно-реактивном электродинамическом двигателе рабочую среду ионизируют электродуговым плазмотроном 1, формируют пучки плазмы и ускоряют частицы заряженной плазмы с помощью скрещенного с полем электрической дуги электрического поля, которое создают аксиально-симметричной системой управляющего и ускоряющего электродов 2 и 4 путем подачи на них соответствующих напряжений (метод «ионной пушки»). Электрическую энергию, необходимую для выполнения вышеуказанных операций и процессов, получают путем преобразования электростатической энергии взаимодействия сжатых в пучок электронов в электромагнитный процесс рабочей частоты, на которую настроены параллельные колебательные контуры, образованные симметричными плечами первичной обмотки 11 и резонансными цепями конденсаторов 7, включенными между концами 6 первичной обмотки 11 и ее средней точкой 8. Электродинамическое тяговое усилие, движущее аппарат, создают путем взаимодействия переменного магнитного потока магнитопровода 12 с током якоря 17, расположенного в зазоре магнитопровода и жестко скрепленного с корпусом аппарата 18. Электродуговая ионизация воздушной среды атмосферы, формирование пучка заряженной плазмы и ускорение потока заряженных частиц (катионов рабочей среды), вылетающих через конфузор двигателя, создают реактивную тягу, движущую аэрокосмический аппарат в атмосфере.
С резонансных конденсаторов 7, через распределители напряжения 10, подают соответствующие напряжения на управляющие 2 и ускоряющие 4 электроды, создающие электрическое поле, формирующее и ускоряющее пучки электронной плазмы, электростатическую энергию которых преобразуют в электроэнергию рабочей (бортовой) частоты. Электроны, пройдя по первичной цепи (обмотка 11) и, совершив в ней электрическую работу, приходят на катод электродугового плазмотрона 1, где рекомбинируют катионы в атомы и молекулы рабочей среды, вновь подвергающейся ионизации электрической дугой. Данный процесс ионизации - рекомбинации рабочей среды производится многократно в герметичном объеме, поэтому рабочая среда не расходуется в режиме «безвоздушное пространство» (диафрагмы герметично закрыты) и электродинамический двигатель может работать неограниченное время.
Электрическую энергию, необходимую для выполнения предложенных выше операций и процессов, получают путем преобразования электростатической энергии взаимодействия сжатых в пучок электронов в электромагнитный процесс рабочей (бортовой) частоты. Электроны, совершив работу в электрической цепи, переходят на катод плазмотрона, где рекомбинируют катионы в атомы и молекулы рабочей среды, вновь подвергаемой ионизации электрической дугой в плазмотроне.
Процесс ионизации - рекомбинации рабочей среды производится многократно в герметичном объеме, поэтому рабочая среда не расходуется, а электродинамический двигатель в режиме герметично закрытых диафрагм может работать неограниченное время, поэтому теоретически радиус действия космического аппарата также не ограничен, при этом не образуются вредные выбросы и отходы, не создается радиационная опасность, негативно воздействующая на персонал и окружающую среду.
Плазменно-реактивный электродинамический двигатель, содержащий ускоритель заряженных частиц, взаимозамещаемые диффузор-конфузор, отличающийся тем, что двигатель включает электродуговой плазмотрон с анодом и катодом, управляющие и ускоряющие электроды электрического поля, скрещенного с полем электрической дуги плазмотрона, электронные мембраны, поляризующиеся электроды, резонансные цепи конденсаторов, распределители напряжения, магнитопровод, на котором выполнены обмотки - первичная со средней точкой, соединенной с массой двигателя, обмотка катионного напряжения, обмотка электрической дуги и токовая обмотка, а в зазоре магнитопровода установлен якорь, жестко соединенный с корпусом аппарата, трехпозиционный переключатель, бортовой источник электроэнергии, преобразователь напряжения электрической дуги, ускоритель заряженных частиц, состоящий из преобразователя катионного напряжения и электродов ускорителя катионов, диафрагмы, блок управления диафрагмами и бортовой компьютер с электронной программой управления двигателем, при этом катод электродугового плазмотрона соединен со средней точкой первичной обмотки и массой двигателя, а анод подключен к плюсовой клемме преобразователя напряжения электрической дуги, минусовая клемма которого соединена с массой двигателя, управляющие и ускоряющие электроды скрещенного электрического поля через распределители напряжения подключены к резонансным цепям конденсаторов, настроенным на резонанс токов на рабочей частоте с симметричными плечами первичной обмотки, концы которой соединены с поляризующимися электродами, обмотка катионного напряжения соединена с преобразователем катионного напряжения, плюсовая клемма которого соединена с массой, а минусовая клемма подключена к электродам ускорителя катионов рабочей среды, обмотка электрической дуги подключена к бортовому источнику электроэнергии и к преобразователю напряжения электрической дуги, минусовая клемма которого соединена с массой двигателя, токовая обмотка через трехпозиционный переключатель соединена с якорем, а соответствующие управляющие выходы бортового компьютера соединены с входом управления распределителя напряжения, трехпозиционного переключателя, бортового источника электроэнергии, преобразователя напряжения электрической дуги, преобразователя катионного напряжения и блока управления диафрагмами.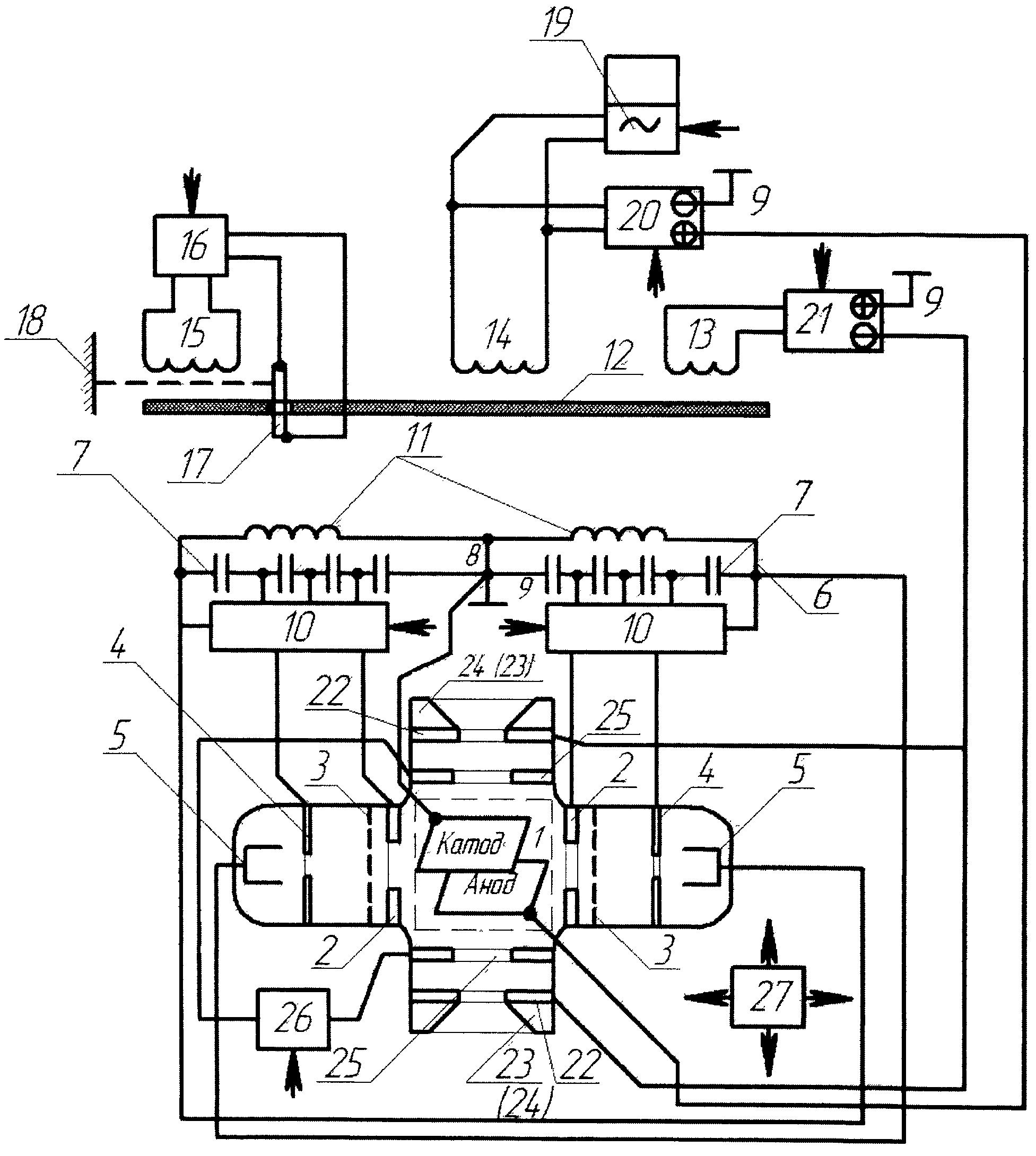
edrid.ru
Под линейным двигателем понимается электрическая машина, обеспечивающая поступательное движение. Наиболее просто можно представить себе линейный двигатель, если мысленно разрезать по образующей цилиндра обычный индукционный двигатель и развернуть его в плоскость. На рисунке 5.7а условно изображена конструкция асинхронного двигателя, ротор которого представлен в виде полого медного цилиндра. Если из статора вырезать и оставить в конструкции часть, соответствующую некоторому центральном углу α, то получится так называемый дугостаторный или сегментный двигатель, рисунок 5.7б, который по характеру электромагнитных процессов может рассматриваться как модификация линейного двигателя. Важной особенностью дугостаторного двигателя является зависимость частоты вращения ротора не только от полюсного деления и частоты тока в обмотке статора, но и от угла α. При заданном числе пар полюсов р и частоте сети f, частота вращения будет тем ниже, чем меньше угол α
 , (5.2)
, (5.2)
где n0 – частота вращения неразрезанного цилиндрического двигателя.
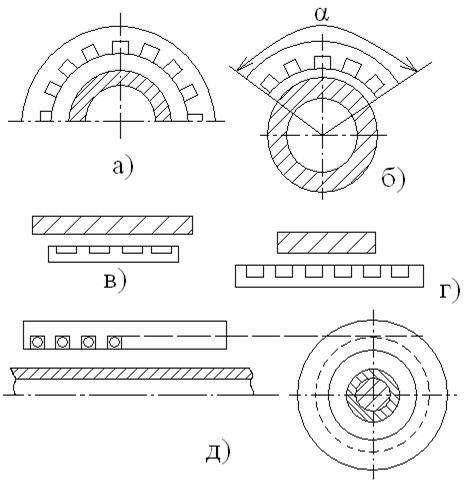
Рисунок 5.7 – Конструктивные схемы асинхронных роторных и линейных двигателей.
а) роторный асинхронный двигатель нормального положения,
б) роторный дугостаторный асинхронный двигатель,
в) линейный асинхронный двигатель с коротким индуктором,
г) линейный асинхронный двигатель с коротким вторичным элементом,
д) цилиндрический линейный асинхронный двигатель.
Если дугостаторный двигатель выполняется с бесконечно большим радиусом, то получают линейный двигатель – второй конструктивный тип двигателей с разомкнутым магнитопроводом. При этом ротор вырождается в плоский вторичный элемент, а статор в первичный элемент.
Линейный электродвигатель – электродвигатель у которого один из элементов магнитной цепи разомкнут и имеет развернутую обмотку создающую общее магнитное поле. Другой элемент магнитной цепи выполнен в виде направляющей, которая обеспечивает линейное перемещение подвижной части двигателя. Отличительной чертой линейного двигателя является наличие магнитодвижущей силы перпендикулярной направлению движения. Эту силу называют нормальной силой. Во вращающихся электрических двигателях такая сила не возникает. После разрезания и развертки в плоскость индукторного (асинхронного) двигателя длины первичной и вторичной частей будут практически одинаковыми. По мере движения их относительно друг друга будет сокращаться активная зона машины и ухудшаться ее характеристики. Чтобы избежать этого поступают двояким образом: либо первичную часть – индуктор (бывший статор) выполняют коротким, в вторичную часть – бегун (бывший ротор) – длинным (рисунок 5.7в), либо индуктор выполняют длинным, а вторичную часть – короткой (рисунок 5.7г). Топологической разновидностью линейного асинхронного двигателя является цилиндрический (трубчатый) асинхронный двигатель (рисунок 5.7д). В этом двигателе цилиндрические катушки обмотки размещаются в индукторе и соединяются друг с другом таким образом чтобы вдоль оси цилиндра возникло бегущее поле: вторичный элемент имеет вид штока, совершающего поступательное движение. Принципиально возможны четыре системы линейных двигателей: электромагнитная, магнитоэлектрическая, электродинамическая и индукционная.
Электромагнитные линейные электрические машины применяются в различных вибрационных и ударных механизмах (например, так называемые, соленоидальные молотки).
Электродинамические линейные двигатели имеют своим вращательным аналогом электрический двигатель постоянного тока. Трудности коммутации и крепления обмотки на движущемся элементе сдерживают применение этих двигателей.
Принцип действия индукционных машин основан на явлении бегущего магнитного поля.
Электромагнитные, электродинамические и индукционные машины имеют довольно сложную конструкцию, большую массу подвижной системы и значительную инерционность. Они используются в основном в приводах мощных электромеханических устройств. В системах точного позиционирования технологического оборудования широко применяется линейный привод магнитоэлектрического типа. Такой привод создает минимальные возмущающие усилия в направлениях несовпадающих с осью перемещений. Прообразом такого двигателя являются динамические громкоговорители. Наиболее простыми в конструктивном исполнении являются цилиндрические линейные двигатели магнитоэлектрического типа. Схема такого двигателя приведена на рисунке 5.8. Между центральным

Рисунок 5.8 Схема цилиндрического магнитоэлектрического двигателя.
1 – магнитопровод, 2 – магнит, 3 – каркас, 4 – обмотка, 5 – (фланец) полюс, 6 – фланец, 7 – центральный стержень(полюс), 8 – исполнительный механизм.
стержнем 7 (керном) и фланцем (полюсом) 5 кольцевого магнита 2 создается сильное магнитное поле. В этом зазоре находится катушка 4 намотанная на каркасе 3. каркас 3 скреплен с фланцем 6 и исполнительным механизмом 8. с помощью фланца 6 и направляющих исполнительного механизма катушки центрируются в зазоре. Катушка помещается точно в середине магнитного зазора. При перемещении она не должна задевать за края полюсов. При пропускании электрического тока катушки втягиваются или вытягиваются из магнитного зазора. Основным недостатком двигателей такой конструкции является то, что при увеличении хода исполнительного звена приходится изменять магнитопроводы. Конструкция становится тяжелой и громоздкой. Такие двигатели эффективны для ограниченных перемещений порядка нескольких сотен микрометров.
Для координатных столов применяются плоские линейные двигатели магнитоэлектрической системы, с замкнутым магнитопроводом (Рис.5.9). Плоский

Рисунок 5.9 - Схема плоского линейного магнитоэлектрического двигателя.
1 – фланец, 2 – обмотка, 3 – каркас, 4 – магнит, 5 – магнитопровод.
линейный двигатель магнитоэлектрического типа состоит из жесткого металлического или пластмассового каркаса, закрепленного с помощью фланца на каретке координатного стола. На каркас уложена и залита эпоксидной смолой обмотка таким образом, что одна часть каждого витка пересекает окно каркаса образует тонкое проволочное полотно. Это полотно вводится в зазор между постоянным магнитом и замкнутым магнитопроводом из ферромагнитного материала. При пропускании по обмотке электрического тока возникает тяговое усилие, которое передается каретке. Величина тягового усилия может быть определена из выражения
 , (5.3)
, (5.3)
где  – величина потокосцепления,
– величина потокосцепления,  ;
;
I – величина поля в катушке, в А;
l – длина магнитного зазора, в м;
В – индукция в воздушном зазоре магнитопровода, в Тл.
Двигатель считается линейным по отношению к направлению перемещения, но ни в коем случае не в отношении тока возбуждения. Поскольку В сложным образом зависит от I зависимость P(I) далеко нелинейная и определяется в каждом конкретном случае путем сложных численных приближений или экспериментально. Обмотка вторичного элемента выполняется обычно проводом ПЭВ-1, ПЭВ-2 с плотностью тока  . Питание двигателей импульсное с широтно-импульсной модуляцией и частотой около 2кГц. Поскольку усилия развиваемые двигателем невелики (обычно несколько десятков Н), то желательно использовать направляющие с минимальным трением, например, аэростатические, или магнитную подушку. При наличии датчика положения и обратной связи точность позиционирования таких систем составляет доли мкм. Суммарная величина перемещений достигает нескольких сантиметров. Скорость перемещения является функцией тягового усилия и составляет от нескольких мм/c до нескольких см/с. При наличии направляющих низкого трения особые трудности возникают при торможении каретки, которому в заданную точку позиционирования нужно выходить на низких, ползучих скоростях. Для торможения используют реверс тока и другие приемы как электрические, так и механические, например введение механических или электромагнитных тормозных устройств. Механический способ торможения сильно усложняет конструкцию систем позиционирования. Электрические способы торможения значительно уменьшают КПД системы, однако при малых мощностях на это не обращают внимание.
. Питание двигателей импульсное с широтно-импульсной модуляцией и частотой около 2кГц. Поскольку усилия развиваемые двигателем невелики (обычно несколько десятков Н), то желательно использовать направляющие с минимальным трением, например, аэростатические, или магнитную подушку. При наличии датчика положения и обратной связи точность позиционирования таких систем составляет доли мкм. Суммарная величина перемещений достигает нескольких сантиметров. Скорость перемещения является функцией тягового усилия и составляет от нескольких мм/c до нескольких см/с. При наличии направляющих низкого трения особые трудности возникают при торможении каретки, которому в заданную точку позиционирования нужно выходить на низких, ползучих скоростях. Для торможения используют реверс тока и другие приемы как электрические, так и механические, например введение механических или электромагнитных тормозных устройств. Механический способ торможения сильно усложняет конструкцию систем позиционирования. Электрические способы торможения значительно уменьшают КПД системы, однако при малых мощностях на это не обращают внимание.

Рисунок 5.10 - Изменение скорости при точной остановке двигателя.
poznayka.org
Использование: на транспортных средствах, в том числе в летательных аппаратах и космической технике. Технический результат: преобразование волновой электромагнитной энергии СВЧ (УКВ)-частотных диапазонов в магнитную движущую силу путем воздействия магнитных составляющих электродинамических полей, излучаемых каждым электрическим вибратором, на высокочастотные токи в другом вибраторе. В результате параллельного расположения вибраторов на расстоянии примерно четверти длины волны друг от друга и смещения фаз токов в них на четверть периода векторы магнитных сил, действующих на каждый вибратор, имеют одно и то же направление, создавая движущую силу. Для практического применения вибраторы должны быть выполнены из сверхпроводящих материалов и находиться в вакуумной камере. Отражатели и диэлектрическая перегородка повышают КПД устройства и улучшают условия его работы. 5 ил.
Изобретение относится к энергомашиностроению и может найти применение на транспорте, в том числе в летательных аппаратах и в космической технике.
Известно изобретение /патент ФРГ DE 3414422 C2/, в котором предлагается расположить параллельно два проводника, или две катушки с проводниками, на расстоянии примерно четверти длины волны /0,27 / и пропускать по ним переменный электрический ток с частотой f, с длиной волны и со смещением фаз на четверть периода /
/ и пропускать по ним переменный электрический ток с частотой f, с длиной волны и со смещением фаз на четверть периода /  = 0,25 Т/. При этих условиях на оба проводника /катушки/ будут действовать магнитные силы в одном направлении, создавая движущую силу. Недостатком этого изобретения является его практически неосуществимость, так как для получения сколько-нибудь значимых сил проводники должны находиться как можно ближе друг к другу /не далее 10...20 см/, а для этого требуется пропускать по ним ток с частотами СВЧ, что практически невозможно. Кроме этого, не предусмотрена синхронизация колебательного процесса в витках катушек. Задачей данного изобретения является создание устройства, способного генерировать значительную магнитную движущую силу и имеющего высокий КПД. Поставленная задача решается за счет выполнения проводников в виде электрических вибраторов, изготовленных /или имеющих покрытие/ из сверхпроводниковых материалов, способных работать при пропуске по ним токов сверхвысокой частоты. Вибраторы располагаются параллельно друг другу на расстоянии примерно 0,25 друг от друга и на них подается высокочастотное напряжение от генератора со смещением фаз на четверть периода. Так как электрический вибратор СВЧ является открытым колебательным контуром /Х.Кухлинг. Справочник по физике, изд. второе. М.: Мир, 1985/, настроенным на частоту генератора, то по длине вибраторов возникают резонансные /стоячие/ волны токов и напряжений /фиг. 3,4.5/ с излучением электромагнитных волн. Если рассмотреть магнитное взаимодействие противоположных участков вибраторов I и II /0-0,5 ; 0,5 - и т.д./ то при указанных условиях, с учетом времени подхода электромагнитной волны /ее магнитной составляющей /от вибратора I до вибратора II /t=0,25Т/ последний, в момент времени t2 = 0,25Т, начнет испытывать действие притягивающей магнитной силы от магнитной индукции BI т.к., по нему в этот момент начинает протекать ток JII /фиг.4/ в тех же направлениях, что и в вибраторе I /фиг. 3/. Вибратор I в момент времени t3=0,5Т, когда по нему начнет течь ток JI /фиг. 5/ будет испытывать действие отталкивающей силы от магнитной индукции ВII волны, излученной вибратором II в момент времени t2 = 0,25Т /токи в противоположных направлениях/. Действие этой силы будет иметь то же направление что и силы, действующей на вибратор II вследствие того, что оба вектора
= 0,25 Т/. При этих условиях на оба проводника /катушки/ будут действовать магнитные силы в одном направлении, создавая движущую силу. Недостатком этого изобретения является его практически неосуществимость, так как для получения сколько-нибудь значимых сил проводники должны находиться как можно ближе друг к другу /не далее 10...20 см/, а для этого требуется пропускать по ним ток с частотами СВЧ, что практически невозможно. Кроме этого, не предусмотрена синхронизация колебательного процесса в витках катушек. Задачей данного изобретения является создание устройства, способного генерировать значительную магнитную движущую силу и имеющего высокий КПД. Поставленная задача решается за счет выполнения проводников в виде электрических вибраторов, изготовленных /или имеющих покрытие/ из сверхпроводниковых материалов, способных работать при пропуске по ним токов сверхвысокой частоты. Вибраторы располагаются параллельно друг другу на расстоянии примерно 0,25 друг от друга и на них подается высокочастотное напряжение от генератора со смещением фаз на четверть периода. Так как электрический вибратор СВЧ является открытым колебательным контуром /Х.Кухлинг. Справочник по физике, изд. второе. М.: Мир, 1985/, настроенным на частоту генератора, то по длине вибраторов возникают резонансные /стоячие/ волны токов и напряжений /фиг. 3,4.5/ с излучением электромагнитных волн. Если рассмотреть магнитное взаимодействие противоположных участков вибраторов I и II /0-0,5 ; 0,5 - и т.д./ то при указанных условиях, с учетом времени подхода электромагнитной волны /ее магнитной составляющей /от вибратора I до вибратора II /t=0,25Т/ последний, в момент времени t2 = 0,25Т, начнет испытывать действие притягивающей магнитной силы от магнитной индукции BI т.к., по нему в этот момент начинает протекать ток JII /фиг.4/ в тех же направлениях, что и в вибраторе I /фиг. 3/. Вибратор I в момент времени t3=0,5Т, когда по нему начнет течь ток JI /фиг. 5/ будет испытывать действие отталкивающей силы от магнитной индукции ВII волны, излученной вибратором II в момент времени t2 = 0,25Т /токи в противоположных направлениях/. Действие этой силы будет иметь то же направление что и силы, действующей на вибратор II вследствие того, что оба вектора  изменили свои направления на противоположные. Далее, во второй половине периода векторы
изменили свои направления на противоположные. Далее, во второй половине периода векторы  дважды меняют направления, оставляя действие магнитной силы неизменным. В следующих периодах цикл повторяется. Магнитная индукция от соседних участков вибраторов несколько усиливает магнитные силы и влияет на оптимальное расстояние между вибраторами, которое может быть точно рассчитано на ЭВМ. Необходимо также учесть нормальные и касательные электрические силы от концентрации зарядов в узлах токов и от их ускорения. Расчеты показывают, что нормальные электрические силы имеют направление, противоположное магнитным, но они примерно в 20 раз слабее их. Касательные составляющие электрических полей, направленные вдоль вибраторов, взаимно уравновешиваются в узлах токов. Эти обстоятельства обосновывают использование именно магнитных сил в данном изобретении. Для уменьшения рассеивания волновой энергии предусматриваются параболические отражатели /фиг.1/, установленные на расстоянии 0,5 за вибраторами. Расстояние 0,5 позволяет синхронизировать фазы отраженной и излученной волн и таким образом усилить последнюю. Для увеличения движущей магнитной силы необходимо создать высокие электромагнитные параметры в устройстве. Для этого вибраторы помещены в герметичный корпус /камеру/, в котором должен поддерживаться глубокий вакуум /для предотвращения электрического пробоя/. Пространство между вибраторами заполняет перегородка из твердого диэлектрика. Применение электрических вибраторов и сверхпроводниковых материалов обеспечивает работоспособность устройства и повышает его экономичность за счет отсутствия электрического сопротивления при сверхпроводимости и применения резонанса токов и напряжений в вибраторах. Применение отражателей сокращает потери волновой энергии на излучение, а применение диэлектрической перегородки позволяет уменьшить расстояние между вибраторами, тем самым увеличив магнитные силы, или уменьшить частоту волны /использовать частоты УКВ/, что создает более благоприятные условия работы сверхпроводников. Все эти конструктивные особенности делают изобретение практически применимым, значительно увеличивают движущую силу и повышают КПД, устройства. Изобретение поясняется чертежами, где на фиг.1 изображена конструкция двигателя-движителя в поперечном разрезе. Фиг. 2 показывает конструкцию двигателя по длине. На фиг. 3 дается эпюра токов в вибраторе I в момент времени t1= 0, когда они имеют экстремальные значения. На фиг.4 приведена эпюра токов в вибраторе II и эпюра магнитной индукции от вибратора I в момент t2= 0,25Т. На фиг. 5 представлена эпюра токов в вибраторе I и эпюра магнитной индукции от вибратора II в момент t3=0,5Т Конструкция двигателя-движителя представлена на фиг.1 и 2. Она включает источник электроэнергии, генератор электромагнитных волн СВЧ /УКВ/ с устройством для питания вибраторов /на фиг. не показаны/. Электрические вибраторы I с покрытием из сверхпроводникового материала располагаются на расстоянии r = 0,25 друг от друга /или близким к нему/ и скрепляются между собой и корпусом 2, с отражателями 3, деталями из диэлектрика 4. В пространстве между вибраторами расположена перегородка 5 из твердого диэлектрика. В герметичном корпусе создается глубокий вакуум, необходимый для предотвращения пробоя и обеспечения сильных токов /и соответственно напряжений/ в вибраторах. Длина вибраторов рассчитывается в зависимости от длины волны. Вибраторы могут быть выполнены в виде одной или нескольких пар прямолинейных или криволинейных отрезков, или в виде спиралей с расчетным расстоянием между витками. Они могут быть выполнены также в виде нескольких сгруппированных витков /катушек/ с длиной окружности, кратной длине волны, что обеспечит синхронность фаз колебательного процесса в витках. Катушки могут быть выполнены из ленточных /полосковых/ проводников, например пленок из сверхпроводниковых материалов с прослойками из диэлектрика. Двигатель-движитель работает от источника электроэнергии, которая преобразуется в генераторе СВЧ /УКВ/ в волновую электромагнитную энергию и которая подпитывает вибраторы. Смещение фаз токов в вибраторах можно устроить за счет разницы длины подводящей части вибраторов на четверть длины волны, а также другими способами. В вибраторах устанавливается колебательный процесс по модели резонансной стоячей волны. С учетом расстояния между вибраторами r
дважды меняют направления, оставляя действие магнитной силы неизменным. В следующих периодах цикл повторяется. Магнитная индукция от соседних участков вибраторов несколько усиливает магнитные силы и влияет на оптимальное расстояние между вибраторами, которое может быть точно рассчитано на ЭВМ. Необходимо также учесть нормальные и касательные электрические силы от концентрации зарядов в узлах токов и от их ускорения. Расчеты показывают, что нормальные электрические силы имеют направление, противоположное магнитным, но они примерно в 20 раз слабее их. Касательные составляющие электрических полей, направленные вдоль вибраторов, взаимно уравновешиваются в узлах токов. Эти обстоятельства обосновывают использование именно магнитных сил в данном изобретении. Для уменьшения рассеивания волновой энергии предусматриваются параболические отражатели /фиг.1/, установленные на расстоянии 0,5 за вибраторами. Расстояние 0,5 позволяет синхронизировать фазы отраженной и излученной волн и таким образом усилить последнюю. Для увеличения движущей магнитной силы необходимо создать высокие электромагнитные параметры в устройстве. Для этого вибраторы помещены в герметичный корпус /камеру/, в котором должен поддерживаться глубокий вакуум /для предотвращения электрического пробоя/. Пространство между вибраторами заполняет перегородка из твердого диэлектрика. Применение электрических вибраторов и сверхпроводниковых материалов обеспечивает работоспособность устройства и повышает его экономичность за счет отсутствия электрического сопротивления при сверхпроводимости и применения резонанса токов и напряжений в вибраторах. Применение отражателей сокращает потери волновой энергии на излучение, а применение диэлектрической перегородки позволяет уменьшить расстояние между вибраторами, тем самым увеличив магнитные силы, или уменьшить частоту волны /использовать частоты УКВ/, что создает более благоприятные условия работы сверхпроводников. Все эти конструктивные особенности делают изобретение практически применимым, значительно увеличивают движущую силу и повышают КПД, устройства. Изобретение поясняется чертежами, где на фиг.1 изображена конструкция двигателя-движителя в поперечном разрезе. Фиг. 2 показывает конструкцию двигателя по длине. На фиг. 3 дается эпюра токов в вибраторе I в момент времени t1= 0, когда они имеют экстремальные значения. На фиг.4 приведена эпюра токов в вибраторе II и эпюра магнитной индукции от вибратора I в момент t2= 0,25Т. На фиг. 5 представлена эпюра токов в вибраторе I и эпюра магнитной индукции от вибратора II в момент t3=0,5Т Конструкция двигателя-движителя представлена на фиг.1 и 2. Она включает источник электроэнергии, генератор электромагнитных волн СВЧ /УКВ/ с устройством для питания вибраторов /на фиг. не показаны/. Электрические вибраторы I с покрытием из сверхпроводникового материала располагаются на расстоянии r = 0,25 друг от друга /или близким к нему/ и скрепляются между собой и корпусом 2, с отражателями 3, деталями из диэлектрика 4. В пространстве между вибраторами расположена перегородка 5 из твердого диэлектрика. В герметичном корпусе создается глубокий вакуум, необходимый для предотвращения пробоя и обеспечения сильных токов /и соответственно напряжений/ в вибраторах. Длина вибраторов рассчитывается в зависимости от длины волны. Вибраторы могут быть выполнены в виде одной или нескольких пар прямолинейных или криволинейных отрезков, или в виде спиралей с расчетным расстоянием между витками. Они могут быть выполнены также в виде нескольких сгруппированных витков /катушек/ с длиной окружности, кратной длине волны, что обеспечит синхронность фаз колебательного процесса в витках. Катушки могут быть выполнены из ленточных /полосковых/ проводников, например пленок из сверхпроводниковых материалов с прослойками из диэлектрика. Двигатель-движитель работает от источника электроэнергии, которая преобразуется в генераторе СВЧ /УКВ/ в волновую электромагнитную энергию и которая подпитывает вибраторы. Смещение фаз токов в вибраторах можно устроить за счет разницы длины подводящей части вибраторов на четверть длины волны, а также другими способами. В вибраторах устанавливается колебательный процесс по модели резонансной стоячей волны. С учетом расстояния между вибраторами r 0,25 и времени подхода волны от одного вибратора до другого, при разницы их фаз 0,25Т происходит магнитное силовое воздействие вибраторов друг на друга в одном направлении по линии, соединяющей их продольные оси. Чтобы изменить направление движущей силы на противоположное, необходимо изменить смещение фазы у одного из вибраторов на половину периода /0,5Т/.
0,25 и времени подхода волны от одного вибратора до другого, при разницы их фаз 0,25Т происходит магнитное силовое воздействие вибраторов друг на друга в одном направлении по линии, соединяющей их продольные оси. Чтобы изменить направление движущей силы на противоположное, необходимо изменить смещение фазы у одного из вибраторов на половину периода /0,5Т/.Формула изобретения
Двигатель-движитель электродинамический вибраторный, содержащий электрические проводники, расположенные параллельно друг другу на расстоянии примерно четверти длины волны пропускаемого по ним тока и имеющие смещение фаз на четверть его периода, отличающийся тем, что проводники выполнены в виде электрических вибраторов из сверхпроводящих материалов, размещены в вакуумной камере с отражателями и имеют перегородку из твердого диэлектрика, заполняющую пространство между вибраторами.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5www.findpatent.ru
Использование: для привода автоматических устройств, в частности в качестве исполнительных механизмов рентгенорадиометрических сепараторов. Технический результат заключается в повышении надежности и долговечности работы. Линейный двигатель содержит корпус, катушки, вал-якорь с рабочим органом, демпферный цилиндр с обратным клапаном и поршнем, выполненным со сквозными каналами истечения газа, продольные оси которых не коллинеарны продольной оси вала-якоря и направлены аналогично каналам истечения газа Сегнерова колеса с возможностью инициирования момента вращения. На внутренней поверхности демпферного цилиндра выполнены продольные пазы длиной, меньшей длины рабочего хода вала-якоря. 2 ил.
Изобретение относится к электрическим двигателям с возвратно-поступательным движением исполнительного органа и может быть использовано для привода автоматических устройств, в частности в качестве исполнительных механизмов рентгенорадиометрических сепараторов.
Известен линейный электродвигатель, содержащий статор, состоящий из цилиндрического ярма с запресованными в нем ферромагнитными кольцами, между которыми запрессованы катушки. В образованных ферромагнитными кольцами, крышками и ярмом пазах установлена подвижная часть, выполненная в виде ферромагнитного "стержня в форме цилиндра, а внутренняя поверхность подшипников повторяет форму подвижной части. (Авт.св. СССР N 860229, H 02 К 4/25, 1981, БИ N 32). Известен электрический двигатель возвратно-поступательного движения, содержащий неподвижный цилиндрический индуктор с магнитопроводом и обмоткой в кольцевом пазу и расположенный соосно с ним подвижный якорь с магнитопроводом и короткозамкнутой обмоткой, уложенной в кольцевой паз, а на якоре расположен дополнительный подпружиненный цилиндрический магнитопровод. (Авт. св. СССР N 1169096, H 02 К 33/02, 1985, БИ N 27). Известные двигатели недостаточно долговечны и надежны в работе, особенно в ударном режиме из-за несимметричного усталостного износа подвижного якоря. Наиболее близким к заявляемому является линейный электродвигатель с выполненными из ферромагнитного материала корпусом, снабженным полюсами, якорем и направляющей, при этом ферромагнитные полюса снабжены с внешней стороны ферромагнитными стаканами, в днище которых имеются отверстия, и в ферромагнитном корпусе, полюсах и стаканах выполнены прорези по образующей и по радиусу, при этом все прорези совмещены и обращены вниз. (Авт.св. СССР N 838938, H 02 К 33/02, 1981, БИ N 22). Этот двигатель также не обладает достаточной долговечностью и надежностью работы из-за несимметричного износа рабочего элемента - вала-якоря. Задачей изобретения является повышение надежности и долговечности работы линейного двигателя. Задача решается тем, что в линейном двигателе возвратно-поступательного движения, включающем корпус с катушками, вал-якорь, демпферный цилиндр с поршнем и обратным клапаном, согласно изобретению поршень снабжен сквозными каналами истечения газа с возможностью инициирования момента вращения, и на внутренней поверхности демпферного цилиндра выполнены продольные пазы на длину, меньшую, чем длина хода поршня, при этом направление каналов истечения соответствует условию: продольные оси каналов не коллинеарны продольной оси вала-якоря и не совпадают ни с одной плоскостью, проходящей через эту ось. Сопоставительный анализ с прототипом показывает, что заявляемое решение отличается тем, что - поршень снабжен сквозными каналами истечения газа с возможностью инициирования момента вращения; - на внутренней поверхности демпферного цилиндра выполнены продольные пазы; - длина продольных пазов короче длины хода поршня; - направление каналов истечения соответствует условию: продольные оси каналов не коллинеарны продольной оси вала-якоря и не совпадают ни с одной плоскостью, проходящей через эту ось. Таким образом, заявляемое решение соответствует критерию "новизна". Сравнение заявляемого решения с аналогами не позволило выявить в них признаки, отличающие заявляемое решение от прототипа. Что позволяет сделать вывод о соответствии заявляемого решения критерию "изобретательский уровень". Изобретение поясняется чертежами, где на фиг. 1 изображен разрез линейного двигателя, а на фиг. 2 - разрез по А-А демпферного цилиндра. Линейный двигатель возвратно-поступательного движения содержит корпус 1, катушки 2, 3, вал-якорь 4 с рабочим органом 5, демпферный цилиндр 6 с продольными пазами 7, поршень 8 с сквозными каналами истечения 9, выполненными по внешней образующей и в теле поршня, обратный клапан 10. Линейный двигатель возвратно-поступательного движения работает следующим образом. Катушка 2 прямого хода инициирует движение вала-якоря 4 в рабочем направлении с выполнением физического воздействия рабочим органом 5, катушка 3 возвращает вал-якорь в исходное положение. Процесс повторяется с высокой скоростью и частотой рабочих ходов. Ударные нагрузки снижаются демпферным цилиндром 6 и поршнем 8 при обратном ходе вала-якоря. В процессе обратного хода поршень не испытывает существенного торможения, так как сжимаемый газ свободно выходит через продольные пазы 7 демпферного цилиндра 6 в смежную полость последнего. Так как продольные пазы короче длины хода поршня, последний сжимает в конечной стадии обратного хода газ, одновременно запирается обратный клапан 10 и при торможении поршня сжатый газ выбрасывается через сквозные каналы в поршне с инициированием реактивных сил, воздействующих на поршень. Расположение сквозных каналов аналогично расположению каналов истечения в Сегнеровом колесе (Советский энциклопедический словарь. -М.: Советская энциклопедия, 1984, с. 1181) и способствует возникновению момента вращения на валу-якоре, что позволяет осуществлять шаговый поворот вала-якоря на 2-5o за каждый ход. Постоянное вращение вала-якоря в течение длительной эксплуатации позволяет повысить износостойкость последнего за счет симметричного усталостного износа, особенно в зоне рабочего органа 5. При динамичных нагрузках за счет симметричного распределения усталостного износа продлевается срок работоспособности вала-якоря в 6-8 раз, что, в свою очередь, повышает надежность и долговечность работы линейного двигателя.Формула изобретения
Линейный двигатель возвратно-поступательного движения, включающий корпус, катушки, вал-якорь с рабочим органом, демпферный цилиндр с поршнем и обратным клапаном для снижения ударных нагрузок при обратном ходе вала-якоря, отличающийся тем, что поршень снабжен сквозными каналами истечения газа, продольные оси которых не коллинеарны продольной оси вала-якоря и не совпадают ни с одной плоскостью, проходящей через эту ось, так, что они направлены аналогично каналам истечения Сегнерова колеса с возможностью инициирования крутящего момента, при этом на внутренней поверхности демпферного цилиндра выполнены продольные пазы, длина которых короче длины хода поршня.РИСУНКИ
Рисунок 1, Рисунок 2Похожие патенты:

Изобретение относится к линейным индукционным машинам с разомкнутым магнитопроводом, в частности к линейным индукционным насосам и линейным тяговым асинхронным машинам


Изобретение относится к электрическим машинам, в частности к способам создания многофазного бегущего электромагнитного поля в электрических машинах переменного тока

Изобретение относится к электроприводам, а более конкретно к электроприводам машин и механизмов преимущественно с малыми и средними оборотами вращения валов рабочих органов, и может быть использовано в буровых и насосных устройствах, в гидроусилителях сверхмощных прессов, в карьерных и городских противо-смоговых вентиляторах, экранолетах, а также в производстве электроэнергии

Изобретение относится к электротехнике, точному машиностроению, робототехнике, в частности к линейным шаговым электромеханизмам, преобразующим импульсы электроэнергии в дискретное линейное перемещение исполнительного механизма, и может быть использовано в силовых и управляемых электроприводах, осуществляющих линейное возвратно-поступательное перемещение рабочих органов без ограничения создаваемых усилий, например в робототизированных системах сварочного, монтажно-сборочного и складского профилей

Изобретение относится к электротехнике и может быть использовано в линейных электрических машинах

Изобретение относится к электромашиностроению, к электротехнике, к робототехнике и может быть использовано в любых исполнительных и силовых электроприводах возвратно-поступательного движения: в станкостроении, в робототехнике, в транспорте, в энергетике, во всех технологических процессах, требующих линейного, управляемого перемещения

Изобретение относится к электротехнике и может быть использовано в транспортных установках с поступательным или вращательно-поступательным перемещением рабочего органа






Изобретение относится к электрическим машинам, в частности к моментным электродвигателям с ограниченным угловым перемещением ротора



Изобретение относится к электротехнике, в частности к коммутационным аппаратам, и может быть использовано для работы в условиях вибрации

Изобретение относится к преобразовательной технике, в частности к преобразователям энергии электрических колебаний в энергию механических колебаний и обратно, и может быть использовано в электроакустике, вибротехнике, системах автоматического контроля, регулирования и т.п

Изобретение относится к электрическим машинам и может использоваться в системах нагнетания текучих сред в качестве насоса

Линейный двигатель
www.findpatent.ru
Двигатель-движитель электродинамический индукционный, состоящий из генератора электромагнитных волн УКВ-СВЧ-частотных диапазонов, вакуумного объемного резонатора электромагнитных волн типа ТЕ или ТМ; противоположные стенки резонатора, на которые замыкаются силовые линии электрического поля волны, имеют разную электропроводность или у них различна площадь токопроводящей поверхности. В качестве электропроводящего материала стенок резонатора может быть использован металл. Стенки резонатора могут иметь покрытие из высокопроводящих или сверхпроводящих материалов. Технический результат заключается в изменении конструкции объемных резонаторов с целью возможности использования их в качестве двигателей-движителей с высоким КПД. 2 з.п.ф-лы, 3 ил.
Изобретение относится к энергомашиностроению и касается усовершенствования электродинамических двигателей-движителей. Оно может найти применение на транспорте, в том числе в летательных аппаратах и в космической технике.
Известен электродинамический движитель, содержащий генератор электромагнитных импульсов, которые образуют электрическое поле вокруг заряженного электростатического элемента и создают электрическую движущую силу (патент РФ N 2093377). Недостатком этого движителя является использование электромагнитных импульсов. Это снижает мощность и КПД движителя, усложняет и утяжеляет конструкцию генератора. Конструкция объемного резонатора давно известна в радиоэлектронике. Резонаторы предназначены для радиоэлектронных приборов СВЧ и устройств, используемых в волноводных трактах. Конструкция этих резонаторов не позволяет использовать их в качестве двигателей-движителей. Наиболее близким по совокупности признаков к заявленному изобретению является устройство резонатора, информация о котором изложена в книге М.Б. Голант и др. "Изготовление резонаторов и замедляющих систем электронных приборов". -М. : Сов. радио, 1969 г., стр. 37, 300-303, состоящее из генератора электромагнитных волн УКВ - СВЧ и вакуумного объемного резонатора. Задачей данного изобретения является изменение конструкции объемных резонаторов с целью возможности использования их в качестве двигателей-движителей с высоким КПД. Поставленные задачи решаются в этом изобретении за счет преобразования волновой электромагнитной энергии в электрическую силу путем воздействия электрических полей стоячих волн в объемном резонаторе на индуцированные электрические заряды различной величины на внутренних поверхностях противоположных стенок резонатора. В изобретении предлагается использовать электромагнитные волны УКВ-СВЧ частотных диапазонов (108...1011 Гц) как наиболее подходящие по параметрам силовых полей и по конструктивным соображениям. В объемном резонаторе генерируются стоячие электромагнитные волны типа TEmn/ или TMmn/, фиг.1, 2/, электрическое поле которых индуцирует на внутренней поверхности стенок резонатора переменные электрические заряды /фиг. 2/ за счет перемещения свободных электронов. На эти заряды в электрическом поле волны действует электрическая сила, причем она тем больше, чем больше концентрация зарядов и электрическое поле волны, которое взаимно усиливается этими же зарядами. На концентрацию зарядов, которую создают токи в стенках резонатора, влияет, кроме силы электрического поля, еще и электропроводность материала его стенок (вследствие кратковременности действия электрических полей). В стенке, изготовленной из высокопроводящих или тем более сверхпроводящих материалов, индуцирование зарядов происходит быстрее и их концентрации сильнее, чем в материалах менее электропроводных. Увеличение концентрации электрических зарядов на поверхности стенки и, следовательно, усиление электрического поля достигается: а/ за счет увеличения электропроводности материала стенки или ее покрытия. Идеальным покрытием может стать плюсовой сверхпроводник, "держащий" высокие частоты; б/ за счет увеличения площади поверхности стенки (волнообразная, из множества мелких полусфер и т.д.). Уменьшение концентрации электрических зарядов на поверхности стенки достигается применением металлов (материалов) с большим электрическим сопротивлением или уменьшением площади токопроводящей поверхности стенки. Таким образом, если одну из стенок, перпендикулярную силовым линиям электрического поля волны в резонаторе выполнить из высокопроводящего (сверхпроводящего) материала, а противоположную - из менее проводящего, то из-за различной концентрации зарядов на его стенки будут действовать противоположные силы различной величины F1 и F2 /фиг. 2/. Разница этих сил и будет создавать движущую силу. Для уменьшения силы, действующей на стенку резонатора, также предлагается использовать жидкий диэлектрик в качестве ее покрытия /фиг. 3/, при этом поверхности всех стенок покрываются высокопроводным или сверхпроводным металлом (материалом). Этим достигается сокращение потерь энергии при движении электронов. Чтобы обеспечить сильные электрические поля и предотвратить пробой, в резонаторе должен быть создан глубокий вакуум. Применение резонанса электромагнитных волн повышает мощность устройства за счет накопления электромагнитной энергии в резонаторе - резком увеличении электрических и магнитных полей в стоячей волне, что в сочетании с применением сверхпроводящих материалов позволит двигателю работать в энергосберегающем режиме. Энергопитание двигателя может осуществляться от генераторов электромагнитных волн, выпускаемых отечественной промышленностью, например, магнетронов. Изобретение поясняется чертежами, где на фиг. 1 показан поперечный разрез объемного резонатора с конструкцией его стенок и характером силовых линий электрических и магнитных полей для волны TE10. На фиг. 2 представлен продольный разрез участка объемного резонатора с характером силовых линий электрического поля волны TE10 и характер концентрации зарядов на его противоположных стенках. На фиг. 3 изображен вариант конструкции стенок резонатора с применением жидкого диэлектрика. Устройство двигателя-движителя состоит из жестко соединенных между собой источника электроэнергии, генератора УКВ-СВЧ с подводящим волноводом /на фигурах не показаны/ и объемного резонатора, противоположные стенки которого 1, или их покрытие 2, выполнены из металлов /материалов/, имеющих различную электропроводность. Как один из способов уменьшения силы, действующей на стенку резонатора, предлагается одну из стенок, на которую замыкаются силовые линии электрического поля волны, покрыть жидким диэлектриком 3, удерживаемым твердым диэлектриком 4 /фиг. 3/. Объемный резонатор по длине может быть выполнен в виде прямолинейных или криволинейных отрезков с отражательными стенками на торцах, в кольцевой, спиральной форме и т. д. Для обеспечения высоких параметров электрических полей внутри резонатора должен поддерживаться глубокий вакуум. Двигатель-движитель работает от источника электроэнергии, которая преобразуется в генераторе в высокочастотную волновую энергию и поступает через подводящий волновод в объемный резонатор, в котором образует стоячие электромагнитные волны типа TE или TM. Замыкаясь на противоположные стенки резонатора силовые линии создают различную концентрацию зарядов на противоположных стенках резонатора. За счет этого силовое воздействие электрического поля волны на стенку с большей электропроводностью /на ее заряд/ будет превосходить силовое воздействие на противоположную стенку, имеющую меньшую электропроводность, или покрытие из жидкого диэлектрика. Разница в этих силах создает движущую электрическую силу, действующую в одном направлении на всю конструкцию, так как все ее элементы жестко соединены между собой.Формула изобретения
1. Двигатель-движитель электродинамический индукционный, состоящий из генератора электромагнитных волн УКВ-СВЧ-частотных диапазонов, вакуумного объемного резонатора электромагнитных волн типа ТЕ или ТМ, отличающийся тем, что противоположные стенки резонатора, на которые замыкаются силовые линии электрического поля волны, имеют разную электропроводность или у них различна площадь токопроводящей поверхности. 2. Двигатель-движитель по п.1, отличающийся тем, что в качестве электропроводящего материала стенок резонатора использован металл. 3. Двигатель-движитель по п.1, отличающийся тем, что стенки резонатора имеют покрытие из высокопроводящих или сверхпроводящих материалов.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3www.findpatent.ru









